Изобретение относится к весоизмерительной технике, в частности к непрерывному весовому взвешиванию сыпучих материалов с помощью ленточного транспортера, и может быть использовано в разработке поточных расходомеров-дозаторов непрерывного действия.
Наиболее близким по технической сущности к предлагаемому изобретению является способ определения оптимальной скорости движения конвейерной ленты поточных расходомеров-дозаторов разного геометрического размера и производительности с загрузкой со стороны взвешивания, который заключается в расчете оптимальной скорости движения конвейерной ленты, основываясь на геометрических данных расходомера-дозатора, а именно площади поперечного сечения формирователя потока, и текущей производительности в виде среднего значения массы, дополнительно определяется необходимость корректировки текущей скорости конвейерной ленты и момент ввода фаззи-регулятора в систему, тем самым сохраняя оперативное пространство, за счет уменьшения обработки математических операций во время работы алгоритма [Патент №0002694447 опубликован 15.07.2019, формула изобретения п. 1].
Недостатком известного способа является то, что при взвешивании потока сыпучего материала остается неизменная площадь поперечного сечения формирователя потока, что приводит к значительным ошибкам определения мгновенной массы при изменении скорости перемещения конвейерной ленты или производительности поточного расходомера-дозатора с загрузкой со стороны взвешивания.
Целью изобретения является способ корректировки расстояния D между конвейерной лентой и корпусом формирователя потока при помощи электропривода, вал которого механически связан с корпусом формирователя потока.
Вышеуказанный результат достигается тем, что в предлагаемом способе корректировки расстояния между конвейерной лентой и корпусом формирователя потока поточного расходомера-дозатора, исходя из требуемой производительности и характеристик дозируемого сыпучего материала, заключающийся в расчете расстояния D между конвейерной лентой и корпусом формирователя потока, основываясь на геометрических данных ширины Н конвейерной ленты и высоты перегородок d, установленных перпендикулярно по краям конвейерной ленты вдоль всей ее длины, поточного расходомера-дозатора и скорости движения конвейерной ленты, дополнительно учитывается угол естественного откоса сыпучего материала и производится корректировка расстояния D между конвейерной лентой и корпусом формирователя потока при помощи электропривода, вал которого механически связан с корпусом формирователя потока.
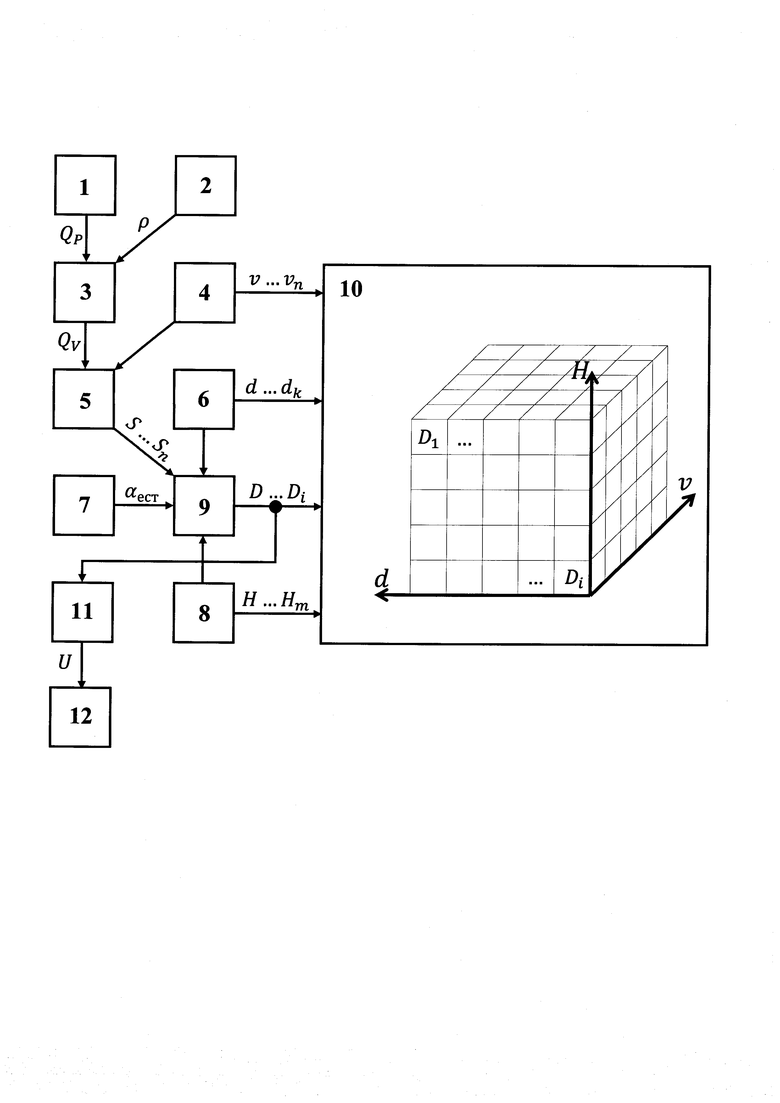
Сущность предлагаемого изобретения поясняется чертежом.
Корректировка расстояния между конвейерной лентой и корпусом формирователя потока поточного расходомера-дозатора осуществляется следующим образом.
В блоке 1 и 2 задаются требуемая производительность QP и насыпная плотности р соответственно, которые подаются в блок 3, где формируется значение объемного расхода QV равное:

В блоке 4 задается допустимый диапазон изменения скорости движения конвейерной ленты υn, где n=1…l, который, совместно со значением объемного расхода QV, подается в блок 5, где формируется значение проходного сечения Sn, где n=1…l, равное:

В состав конструкции ПРД входят две одинаковые перегородки, установленные перпендикулярно по краям конвейерной ленты вдоль всей ее длины. В блоке 6, 7 и 8 задаются допустимый диапазон высот перегородки dk, где k=1…р, угол естественного откоса αест и допустимый диапазон ширины конвейерной ленты Нm, где m=1…j, соответственно, которые, совместно со значением проходного сечения Sn, подаются в блок 9, где формируется значение расстояния между конвейерной лентой и корпусом формирователя потока Di, где i=1…w, равное:

где i=1…w, m=1…j, k=1…р, n=1…l, w=1…l⋅р⋅l.
Значения из блоков 4, 6, 8 и 9 в виде допустимого диапазона изменения скорости движения конвейерной ленты υn, где n=1…l, допустимого диапазона высот перегородки dk, где k=1…р, допустимого диапазона ширины конвейерной ленты Нm, где m=1…j и значений расстояний между конвейерной лентой и корпусом формирователя потока Di, где i=1…w, соответственно, подаются в блок 10, где формируется градуировочная таблица производственных технических параметров ПРД. Значения расстояний между конвейерной лентой и корпусом формирователя потока Di, также подаются в блок 11 где преобразуются в электрический сигнал U. На выходе из блока 11 электрический сигнал U поступает на электропривод 12, вал которого механически связан с корпусом формирователя потока, для корректировки расстояния D между конвейерной лентой и корпусом формирователя потока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения оптимальной скорости движения конвейерной ленты поточных расходомеров-дозаторов разного геометрического размера и производительности с загрузкой со стороны взвешивания | 2018 |
|
RU2694447C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕСОВЫХ ПОКАЗАТЕЛЕЙ РАСХОДОМЕРА-ДОЗАТОРА | 2016 |
|
RU2650423C1 |
| ВЕСОВОЙ РАСХОДОМЕР-ДОЗАТОР | 2016 |
|
RU2634325C1 |
| ПОТОЧНЫЙ РАСХОДОМЕР-ДОЗАТОР СЫПУЧИХ МАТЕРИАЛОВ | 2012 |
|
RU2509986C2 |
| ВЕСОВОЙ КОМБИНАЦИОННЫЙ ДОЗАТОР | 2021 |
|
RU2775198C1 |
| СПОСОБ ВЕСОВОГО ДОЗИРОВАНИЯ СЫПУЧИХ МАТЕРИАЛОВ | 2005 |
|
RU2287136C1 |
| ДОЗАТОР В.А. СЕДУНОВА | 1999 |
|
RU2163355C1 |
| Вибрационный бункер-дозатор | 1986 |
|
SU1370036A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ТЕХНИЧЕСКИ ОПТИМАЛЬНЫМ УГЛОМ НАКЛОНА НЕПОДВИЖНОЙ НАПРАВЛЯЮЩЕЙ ПОВЕРХНОСТИ ДВИЖЕНИЯ ВЗВЕШИВАЕМОЙ И ДОЗИРУЕМОЙ СЫПУЧЕЙ СМЕСИ САМОТЕКОМ ЗА СЧЕТ СИЛЫ ЗЕМНОГО ТЯГОТЕНИЯ ПРИ ПРИГОТОВЛЕНИИ И РАЗДАЧЕ КОРМОВ И КОРМОВЫХ СМЕСЕЙ В ЖИВОТНОВОДСТВЕ И ПТИЦЕВОДСТВЕ | 2014 |
|
RU2597437C2 |
| ДОЗАТОР ВЕСОВОЙ | 2019 |
|
RU2721720C1 |
Изобретение относится к весоизмерительной технике, в частности к непрерывному весовому взвешиванию сыпучих материалов с помощью ленточного транспортера, и может быть использовано в разработке поточных расходомеров-дозаторов непрерывного действия. Целью изобретения является способ корректировки расстояния D между конвейерной лентой и корпусом формирователя потока при помощи электропривода, вал которого механически связан с корпусом формирователя потока. Вышеуказанный результат достигается тем, что в предлагаемом способе корректировки расстояния между конвейерной лентой и корпусом формирователя потока поточного расходомера-дозатора исходя из требуемой производительности и характеристик дозируемого сыпучего материала, заключающемся в расчете расстояния D между конвейерной лентой и корпусом формирователя потока, основываясь на геометрических данных ширины Н конвейерной ленты и высоты перегородок d, установленных перпендикулярно по краям конвейерной ленты вдоль всей ее длины, поточного расходомера-дозатора и скорости движения конвейерной ленты, дополнительно учитывается угол естественного откоса сыпучего материала и производится корректировка расстояния D между конвейерной лентой и корпусом формирователя потока при помощи электропривода, вал которого механически связан с корпусом формирователя потока. 1 ил.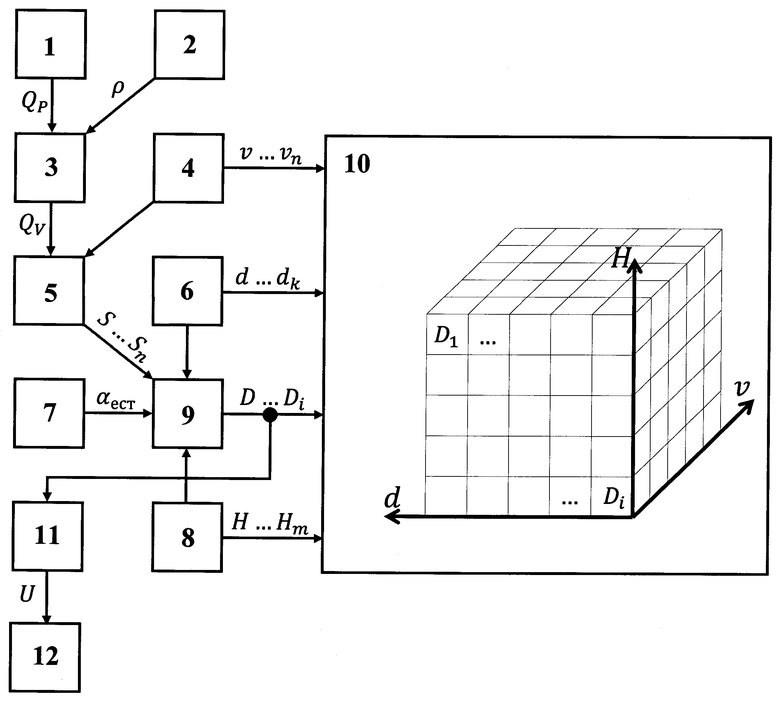
Способ корректировки расстояния между конвейерной лентой и корпусом формирователя потока поточного расходомера-дозатора исходя из требуемой производительности и характеристик дозируемого сыпучего материала, заключающийся в расчете расстояния D между конвейерной лентой и корпусом формирователя потока, основываясь на геометрических данных ширины Н конвейерной ленты и высоты перегородок d, установленных перпендикулярно по краям конвейерной ленты вдоль всей ее длины, поточного расходомера-дозатора и скорости движения конвейерной ленты, дополнительно учитывается угол естественного откоса сыпучего материала и производится корректировка расстояния D между конвейерной лентой и корпусом формирователя потока при помощи электропривода, вал которого механически связан с корпусом формирователя потока.
| Способ определения оптимальной скорости движения конвейерной ленты поточных расходомеров-дозаторов разного геометрического размера и производительности с загрузкой со стороны взвешивания | 2018 |
|
RU2694447C1 |
| СПОСОБ ГРАДУИРОВКИ И ПОВЕРКИ КОНВЕЙЕРНЫХ ВЕСОВ | 2005 |
|
RU2289798C1 |
| ПОТОЧНЫЙ РАСХОДОМЕР-ДОЗАТОР СЫПУЧИХ МАТЕРИАЛОВ | 2012 |
|
RU2509986C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕСОВЫХ ПОКАЗАТЕЛЕЙ РАСХОДОМЕРА-ДОЗАТОРА | 2016 |
|
RU2650423C1 |
| CN 203116825 U, 07.08.2013 | |||
| EP 3531086 A1, 28.08.2019. | |||

