Изобретение относится к радиотехнике и может быть использовано в системах контроля наземного, морского и воздушного пространства с использованием прямых и рассеянных объектами радиосигналов, излучаемых множеством неконтролируемых и контролируемых передатчиков радиоэлектронных систем различного назначения.
Достижение высокой эффективности обнаружения, локализации и идентификации наземных, морских и воздушных объектов ограничивается существенной априорной неопределенностью размеров, ориентации в пространстве, отражающих свойств и параметров движения объектов, а также несовершенством известных способов обнаружения и слежения за подвижными объектами.
Технология скрытного обнаружения и слежения за подвижными объектами, использующая естественный радиоподсвет целей, создаваемый на множестве частот радиоизлучениями передатчиков различного назначения в диапазонах коротких, метровых, дециметровых и сантиметровых волн: широковещательные (коммерческое FM-радиовещание, телевидение высокой четкости), информационные (связь) и измерительные (управление, навигация), пока еще не получила достаточного распространения, несмотря на то, что может существенно повысить скрытность и эффективность обнаружения, пространственной локализации и идентификации все возрастающего количества широкого класса малоразмерных подвижных объектов.
Известен способ поиска малоразмерных подвижных объектов [1], заключающийся в том, что выбирают передатчик, излучающий радиосигнал с расширенным спектром, синхронно принимают решеткой антенн многолучевые радиосигналы, включающие прямой радиосигнал передатчика и рассеянные от объектов радиосигналы этого передатчика, синхронно преобразуют ансамбль принятых антеннами радиосигналов в цифровые сигналы, из цифровых сигналов формируют прямые и сжатые рассеянные сигналы, сравнивают выделенные прямые и рассеянные сигналы и определяют временные задержки, доплеровские сдвиги и направления прихода рассеянных сигналов, по временным задержкам, доплеровским сдвигам и направлениям прихода выполняют обнаружение и пространственную локализацию подвижных объектов.
Данный способ не содержит операций подавления когерентной помехи в виде прямого радиосигнала передатчика и, как следствие, обеспечивает эффективное обнаружение только близко расположенных и интенсивно отражающих объектов.
Более эффективным является способ поиска малоразмерных подвижных объектов [2], свободный от этого недостатка и выбранный в качестве прототипа.
Согласно этому способу:
используют прямые и рассеянные подвижными объектами радиосигналы, излучаемые передатчиками радиоэлектронных систем различного назначения с непрерывными линейно-частотно-модулированными радиосигналами;
периодически несинхронно и синхронно с облучающим сигналом принимают на множестве частот поиска многолучевые радиосигналы, включающие прямые и рассеянные объектами радиосигналы выбранного передатчика;
принятые радиосигналы преобразуют в цифровые сигналы;
из цифровых сигналов путем радиоэлектронной компенсации некогерентных и когерентных помех выделяют полезные рассеянные подвижными объектами сигналы, по которым выполняют обнаружение и пространственную локализацию объектов.
Способ-прототип за счет выбора передатчиков, излучающих линейно-частотно-модулированные радиосигналы (ЛЧМ), и применения радиоэлектронной компенсации широкого класса когерентных и некогерентных помех обеспечивает высокую вероятность обнаружения и точность пространственной локализации крупных подвижных объектов.
Однако эффективность способа-прототипа при поиске малоразмерных подвижных объектов резко снижается.
Это обусловлено несколькими причинами. Радиозаметность подвижных объектов зависит от отношения характерных размеров объекта L к длине волны источника подсвета λ и при 
Таким образом, недостатком способа-прототипа является низкая вероятность поиска малоразмерных подвижных объектов.
Техническим результатом изобретения является повышение вероятности поиска малоразмерных подвижных объектов.
Повышение вероятности поиска достигается за счет выбора вместо передатчиков, излучающих ЛЧМ радиосигналы, передатчиков, совмещенных в пространстве и излучающих на множестве частот узкополосные и широкополосные радиосигналы, а также применения новой совокупности операций адаптивной и комбинированной обработки прямых и рассеянных объектами радиосигналов выбранных передатчиков.
Технический результат достигается тем, что в способе поиска малоразмерных подвижных объектов, заключающемся в том, что используют прямые и рассеянные подвижными объектами радиосигналы, излучаемые передатчиками радиоэлектронных систем различного назначения, согласно изобретению, выбирают передатчики, совмещенные в пространстве и излучающие на множестве частот узкополосные и широкополосные радиосигналы, синхронно принимают на множестве частот поиска многолучевые сигналы, включающие прямые и рассеянные радиосигналы, синхронно преобразуют принятые радиосигналы в цифровые сигналы, из цифровых сигналов формируют и запоминают узкополосные и широкополосные опорные и разведываемые сигналы для заданных азимутально-угломестных направлений приема, преобразуют каждый узкополосный опорный сигнал s(i), i=1,…,Ki - номер частоты узкополосного радиосигнала в матричный сигнал комплексной фазирующей функции А(i), включающей гипотетические сигналы, рассеиваемые каждым потенциальным объектом, запоминают матричные сигналы А(i) для каждого ℓ-го азимутально-угломестного направления приема, преобразуют каждый узкополосный разведываемый сигнал 





 , где λ - множитель Лагранжа, до тех пор, пока номер текущей итерации не превысит заданный порог, усредняют по частоте модули
, где λ - множитель Лагранжа, до тех пор, пока номер текущей итерации не превысит заданный порог, усредняют по частоте модули  элементов текущих двумерных изображений
элементов текущих двумерных изображений  , определяют по максимумам усредненного двумерного изображения
, определяют по максимумам усредненного двумерного изображения  число рассеянных сигналов и фиксируют значения бистатической дальности d(p) и бистатической скорости ν(p) каждого p-го рассеянного сигнала, преобразуют каждый широкополосный опорный сигнал s(j), j=1, …, Kj - номер частоты широкополосного радиосигнала в матричный сигнал комплексной фазирующей функции
число рассеянных сигналов и фиксируют значения бистатической дальности d(p) и бистатической скорости ν(p) каждого p-го рассеянного сигнала, преобразуют каждый широкополосный опорный сигнал s(j), j=1, …, Kj - номер частоты широкополосного радиосигнала в матричный сигнал комплексной фазирующей функции  , включающей гипотетические сигналы, рассеиваемые каждым потенциальным объектом с нулевой и найденной бистатической скоростью ν(p) p-го рассеянного сигнала, запоминают матричные сигналы , итерационно преобразуют каждый широкополосный разведываемый сигнал
, включающей гипотетические сигналы, рассеиваемые каждым потенциальным объектом с нулевой и найденной бистатической скоростью ν(p) p-го рассеянного сигнала, запоминают матричные сигналы , итерационно преобразуют каждый широкополосный разведываемый сигнал  с использованием матричного сигнала комплексной фазирующей функции в сигнал текущего одномерного изображения
с использованием матричного сигнала комплексной фазирующей функции в сигнал текущего одномерного изображения  p-го рассеянного сигнала до тех пор, пока номер текущей итерации не превысит заданный порог, усредняют по частоте модули
p-го рассеянного сигнала до тех пор, пока номер текущей итерации не превысит заданный порог, усредняют по частоте модули  элементов текущих одномерных изображений p-го рассеянного сигнала
элементов текущих одномерных изображений p-го рассеянного сигнала  , определяют по максимумам усредненного одномерного изображения
, определяют по максимумам усредненного одномерного изображения  уточненное значение бистатической дальности
уточненное значение бистатической дальности  p-го рассеянного сигнала, по значениям выбранного азимутально-угломестного направления приема разведываемых сигналов, бистатической скорости ν(p) и уточненной бистатической дальности каждого p-го рассеянного сигнала обнаруживают и определяют пространственные координаты малоразмерных подвижных объектов.
p-го рассеянного сигнала, по значениям выбранного азимутально-угломестного направления приема разведываемых сигналов, бистатической скорости ν(p) и уточненной бистатической дальности каждого p-го рассеянного сигнала обнаруживают и определяют пространственные координаты малоразмерных подвижных объектов.
Операции способа поясняются чертежом.
Устройство, в котором реализуется предложенный способ, содержит последовательно соединенные систему приема 1, систему моделирования и выбора радиопередатчиков (РПД) 2, вычислительную систему 3 и блок управления и индикации 4.
В свою очередь, система приема 1 включает N трактов приема 1-n, каждый из которых состоит из антенны 1, устройства усиления и коммутации 2, К модулей фильтрации и усиления 3-k и многоканального аналого-цифрового преобразователя (АЦП) 4.
При этом система 2 соединена с входом блока 4, а также имеет интерфейс для соединения с внешней базой РПД. Кроме того, блок 4 имеет выход, предназначенный для подключения к внешним системам.
Система 1 является аналогово-цифровым устройством и предназначена для многоканального приема и аналогово-цифрового преобразования радиосигналов, принятых на множестве К=Ki+Кj. частот поиска каждой из N пространственно разнесенных антенн.
Каждая антенна 1 тракта приема 1-n является направленной. Пространственная конфигурация размещения антенн может быть произвольной: плоской прямоугольной, плоской кольцевой или объемной, в частности конформной.
Устройство усиления и коммутации 2 тракта приема 1-n предназначено для усиления и деления принятого антенной 1 многолучевого радиосигнала для последующей фильтрации по частоте в К модулях 3-k. Кроме этого, устройство 2 предназначено для коммутации на входы модулей 3-k сигнала калибровочного генератора вместо сигнала, принятого антенной 1 (для упрощения калибровочный генератор на схеме не показан).
Отдельный модуль фильтрации и усиления 3-k тракта приема 1-n построен на основе преобразователя частоты и предназначен для селекции по частоте одного из сигналов, принятых на множестве К=Ki+Kj частот поиска. Полоса пропускания каждого модуля 3-k изменяется в соответствии с шириной спектра принимаемого радиосигнала.
Многоканальный АЦП 4 содержит К каналов и синхронизирован сигналом опорного генератора (для упрощения опорный генератор на схеме не показан). Если разрядность и быстродействие АЦП достаточны для непосредственного аналого-цифрового преобразования входных сигналов, то в модуле 3-k вместо преобразователя частоты могут использоваться частотно-избирательный полосовой фильтр и усилитель.
Система 2 является вычислительным устройством и предназначена для идентификации, отбора и периодического обновления совокупности передатчиков, облучающих заданную область пространства узкополосными и широкополосными радиосигналами, а также формирования модельных сигналов выбранных передатчиков.
Вычислительная система 3 предназначена для двухэтапной итерационно реализуемой адаптивной обработки опорных и разведываемых сигналов с целью обнаружения и определения параметров обнаруженных малоразмерных подвижных объектов.
Устройство работает следующим образом.
В системе 2 на основе данных внешней базы радиопередатчиков, а также данных об обнаруженных передатчиках, поступающих от вычислительной системы 3, с использованием программных средств моделирования идентифицируется, выбирается и периодически обновляется совокупность передатчиков, излучающих узкополосные и широкополосные радиосигналы. При моделировании оцениваются возможные зоны покрытия, вероятности обнаружения и достижимые точности локализации подвижных объектов различного класса, которые могут быть обеспечены при различных вариантах размещения передатчиков относительно станции обнаружения-пеленгования. Кроме того, в системе 2 формируются модельные сигналы передатчиков, которые могут быть использованы вместо реальных прямых сигналов передатчиков при априорно известных параметрах синхронизации. Параметры выбранного множества передатчиков (номер i=1,…,Ki и значение несущей частоты узкополосного сигнала, номер j=1,…,Kj и значение несущей частоты широкополосного сигнала, ширина спектра, форма и мощность излучаемого сигнала, координаты или расстояние и угловое положение относительно пункта приема) запоминаются в системе 2 и в блоке 4, а также используются для настройки по частоте модулей 3-k трактов приема 1-n. С целью упрощения цепи управления преобразователями не показаны.
По сигналу блока 4 модули 3-k перестраиваются на заданные i-е, i=1,…,Ki частоты приема узкополосных и j-е, j=1,…,Кj частоты приема широкополосных радиосигналов. Многолучевые радиосигналы, включающие прямые сигналы передатчиков и рассеянные объектами радиосигналы этих передатчиков, синхронно принимаются каждой из N антенн на множестве К=Кi+Кj частот поиска.
Принятый антеннами всех N трактов приема, зависящий от номера антенны n и времени t, узкополосный 

Например, узкополосный радиосигнал на несущей частоте с номером i=1 поступает в модуль 3-1 каждого из N трактов приема 1-n, узкополосный радиосигнал на несущей частоте с номером i=2 поступает в модуль 3-2, а широкополосный радиосигнал на несущей частоте с номером j=1 поступает в модуль 3-3 и т.д.
Сформированные в модулях 3-k всех трактов приема 1-n ансамбли узкополосных 




В вычислительной системе 3 выполняются следующие действия:
- из цифровых сигналов

Формирование опорных и разведываемых сигналов может быть осуществлено различными способами, например путем адаптивной пространственной фильтрации цифровых сигналов
При этом, например, для получения узкополосных опорных s(i) и узкополосных разведываемых
- ансамбль цифровых сигналов

- сигнал корреляционной матрицы R(i) преобразуется в сигнал оптимального весового вектора w(i)=(R(i))-1v(i) для формирования опорного сигнала и в сигналы оптимальных весовых векторов 
- матричный цифровой сигнал X(i) преобразуется в опорный s(i)=w(i)HX(i) и в разведываемый 
Формирование широкополосного опорного s(j) и широкополосных разведываемых
Сформированные узкополосные опорные сигналы s(i), широкополосные опорные сигналы s(j), а также узкополосные разведываемые сигналы
После этого в вычислительной системе 3 осуществляются следующие операции:
- каждый узкополосный опорный сигнал s(i) преобразуется в матричный сигнал комплексной фазирующей функции А(i), включающей гипотетические сигналы, рассеиваемые каждым потенциальным объектом, матричные сигналы А(i) запоминаются.
Преобразование опорного сигнала s(i) в матричный сигнал А(i) осуществляется по следующей формуле: 


- матрицы доплеровских сдвигов, ξ=0, …, ±L, L - размер координатной сетки по доплеровскому сдвигу.
Таким образом, столбцы матрицы A(i) представляют собой задержанные по времени и сдвинутые по частоте доплеровского сдвига версии опорного сигнала s(i), а размер этой матрицы Z×B(2L+1) определяется числом отсчетов в разведываемом сигнале (длительностью интервала наблюдения) и размерами координатной сетки по временному запаздыванию и доплеровскому сдвигу частоты;
- для каждого l-го азимутально-угломестного направления приема каждый узкополосный разведываемый сигнал  преобразуется в сигнал комплексного двумерного изображения
преобразуется в сигнал комплексного двумерного изображения  , где A(i)H - матрица, эрмитово сопряженная с A(i), сигнал
, где A(i)H - матрица, эрмитово сопряженная с A(i), сигнал  запоминается и используется в качестве начального приближения, а также итерационно формируются зависящий от предыдущего решения вспомогательный матричный сигнал
запоминается и используется в качестве начального приближения, а также итерационно формируются зависящий от предыдущего решения вспомогательный матричный сигнал  ,
,  - z-й элемент вектора
- z-й элемент вектора  , k=1, 2, … - номер итерации, и сигнал очередного приближения двумерного изображения
, k=1, 2, … - номер итерации, и сигнал очередного приближения двумерного изображения  , где λ - множитель Лагранжа, до тех пор, пока номер текущей итерации не превысит заданный порог.
, где λ - множитель Лагранжа, до тех пор, пока номер текущей итерации не превысит заданный порог.
Экспериментально установленное значение порога равно 10:
- после этого усредняются по частоте модули  элементов текущих двумерных изображений
элементов текущих двумерных изображений  .
.
Эта операция пропорционально корню из числа частот Ni увеличивает отношение сигнал/шум и, как следствие, повышает вероятность обнаружения малоразмерных объектов в анализируемом l-ом азимутально-угломестном направлении приема;
- определяется по максимумам усредненного двумерного изображения  число рассеянных сигналов и фиксируются значения бистатической дальности d(p) и бистатической скорости ν(p) каждого p-го рассеянного сигнала.
число рассеянных сигналов и фиксируются значения бистатической дальности d(p) и бистатической скорости ν(p) каждого p-го рассеянного сигнала.
Эта операция завершает двумерную обработку узкополосных радиосигналов. Следующие операции используют полученную при обработке узкополосных радиосигналов информацию о бистатической скорости ν(p) каждого p-го рассеянного сигнала в качестве целеуказания для осуществления более экономичной с точки зрения вычислений одномерной обработки широкополосных сигналов;
- преобразуется каждый широкополосный опорный сигнал s(j) в матричный сигнал комплексной фазирующей функции  , включающей гипотетические сигналы, рассеиваемые каждым потенциальным объектом с нулевой и найденной бистатической скоростью ν(p) p-го рассеянного сигнала, матричные сигналы запоминаются.
, включающей гипотетические сигналы, рассеиваемые каждым потенциальным объектом с нулевой и найденной бистатической скоростью ν(p) p-го рассеянного сигнала, матричные сигналы запоминаются.
Преобразование широкополосного опорного сигнала s(j) в матричный сигнал осуществляется по следующей формуле:  , где
, где  - векторы размером Z×1, являющиеся сдвинутыми по времени на bTs версиями опорного сигнала s(j), b=0, …, B-1, B - число временных задержек прямого сигнала, Ts - период выборки сигнала;
- векторы размером Z×1, являющиеся сдвинутыми по времени на bTs версиями опорного сигнала s(j), b=0, …, B-1, B - число временных задержек прямого сигнала, Ts - период выборки сигнала;  - матрица доплеровских сдвигов, ξ′ - дискретное значение доплеровского сдвига частоты, соответствующее найденной бистатической скорости ν(p) p-го рассеянного сигнала;
- матрица доплеровских сдвигов, ξ′ - дискретное значение доплеровского сдвига частоты, соответствующее найденной бистатической скорости ν(p) p-го рассеянного сигнала;
- итерационно преобразуется каждый широкополосный разведываемый сигнал  с использованием матричного сигнала комплексной фазирующей функции
с использованием матричного сигнала комплексной фазирующей функции  в сигнал текущего одномерного изображения
в сигнал текущего одномерного изображения  p-го рассеянного сигнала до тех пор, пока номер текущей итерации не превысит заданный порог.
p-го рассеянного сигнала до тех пор, пока номер текущей итерации не превысит заданный порог.
При этом выполняются следующие действия:
каждый широкополосный разведываемый сигнал с использованием матричного сигнала комплексной фазирующей функции преобразуется в сигнал текущего одномерного изображения p-го рассеянного сигнала  , где
, где  - матрица, эрмитово сопряженная с
- матрица, эрмитово сопряженная с  , сигнал
, сигнал  запоминается и используется в качестве начального приближения, а также
запоминается и используется в качестве начального приближения, а также
итерационно формируется зависящий от предыдущего решения вспомогательный матричный сигнал  ,
,  - z-й элемент вектора
- z-й элемент вектора  , k=1, 2, … - номер итерации, и сигнал очередного приближения одномерного изображения
, k=1, 2, … - номер итерации, и сигнал очередного приближения одномерного изображения  , где λ - множитель Лагранжа, до тех пор, пока номер текущей итерации не превысит заданный порог. Значение порога выбирается равным 10.
, где λ - множитель Лагранжа, до тех пор, пока номер текущей итерации не превысит заданный порог. Значение порога выбирается равным 10.
После этого в вычислительной системе 3 осуществляются следующие операции:
- усредняются по частоте модули  элементов текущих одномерных изображений p-го рассеянного сигнала
элементов текущих одномерных изображений p-го рассеянного сигнала  ;
;
- определяется по максимумам усредненного одномерного изображения  уточненное значение бистатической дальности
уточненное значение бистатической дальности  p-го рассеянного сигнала.
p-го рассеянного сигнала.
Отметим, что степень уточнения значения бистатической дальности тем выше, чем больше число частот Kj. Кроме этого, степень уточнения значения бистатической дальности растет с увеличением отношения ширины спектра широкополосного сигнала к ширине спектра узкополосного сигнала. Это обусловлено тем, что при фиксированном отношении сигнал/шум точность оценки дальности тем выше, чем больше ширина спектра сигнала источника подсвета. Так, если в качестве узкополосных сигналов подсвета выбраны сигналы радиостанций УКВ ЧМ радио (диапазон 88-108 МГц) с шириной спектра 100 кГц, а в качестве широкополосных - сигналы радиостанций цифрового телевизионного вещания (диапазон 450-860 МГц) с шириной спектра 7,6 МГц, выигрыш в точности оценивания бистатической дальности может достигать 7600/100=76 раз. Отметим, что пропорционально увеличению точности оценивания бистатической дальности растет вероятность обнаружения объектов, достигаемая на следующем этапе обработки сигналов;
- по значениям выбранного азимутально-угломестного направления приема разведываемых сигналов, бистатической скорости ν(p) и уточненной бистатической дальности каждого p-го рассеянного сигнала обнаруживаются и определяются пространственные координаты малоразмерных подвижных объектов.
Обнаружение и пространственная локализация малоразмерных подвижных объектов осуществляется известными способами, например [4].
При этом выполняются следующие действия:
1) сравниваются с порогом значения бистатической скорости ν(p) каждого p-го рассеянного сигнала и при превышении порога принимаются решения об обнаружении p-го подвижного объекта. Порог выбирается исходя из минимизации вероятности пропуска объекта;
2) по значениям уточненной бистатической дальности строится эллипсоид равных бистатических дальностей;
3) по пересечению эллипсоида равных бистатических дальностей и азимутально-угломестного направления приема p-го рассеянного сигнала определяются географические координаты p-го обнаруженного объекта.
В устройстве 4 отображаются результаты обнаружения и пространственной локализации объектов.
Из приведенного описания следует, что в основу предложенного способа положен факт совмещения в одной точке пространства узкополосных радио- и широкополосных телевещательных передатчиков, например размещения совокупности таких передатчиков на Останкинской телевышке. Благодаря этому обеспечивается совпадение бистатической геометрии всех возможных пар передатчик - приемник и открывается возможность осуществления операций комбинированной двухэтапной обработки сигналов, повышающих вероятность обнаружения малоразмерных подвижных объектов. При этом на первом этапе в силу малых вычислительных затрат, требуемых при обработке узкополосных радиосигналов, осуществляется быстрое обнаружение сигналов целей, высокоточное определение бистатической скорости и грубое (в силу узкой ширины спектра радиосигналов) определение бистатической дальности каждой цели путем обработки прямых и рассеянных радиосигналов. Для повышения отношения сигнал/шум и, следовательно, повышения вероятности обнаружения и точности оценивания параметров радиосигналов, рассеянных малоразмерными объектами, применяют новые итерационно реализуемые операции адаптивной обработки, обеспечивающие повышение разрешающей способности и динамического диапазона синтеза частотно-временного изображения радиосигналов, рассеянных контролируемыми объектами, а также усреднение информации, получаемой с использованием нескольких узкополосных передатчиков подсвета. Полученные на первом этапе значения бистатической скорости объектов используют на втором этапе для уточнения их бистатических дальностей. При этом вместо традиционно выполняемой двумерной обработки, используя в качестве целеуказания полученные на первом этапе значения бистатической скорости, выполняется одномерная адаптивная обработка рассеянных объектами широкополосных радиосигналов. Усреднением полученных уточненных бистатических дальностей достигается дополнительное увеличение вероятности обнаружения и точности определения бистатических дальностей малоразмерных подвижных объектов.
Таким образом, за счет выбора передатчиков, совмещенных в пространстве и излучающих на множестве частот узкополосные и широкополосные радиосигналы, а также применения новой совокупности операций адаптивной и комбинированной обработки прямых и рассеянных объектами радиосигналов выбранных передатчиков удается решить поставленную задачу с достижением указанного технического результата.
Источники информации
1. US, патент, 7 012 552 В2, кл. G08В 21/00, 2006 г.
2. RU, патент, 2 440 588 С1, кл. G01S 13/02, 2012 г.
3. Ратынский М.В. Адаптация и сверхразрешение в антенных решетках. М: Радио и связь, 2003 г.
4. RU, патент, 2 444 754, кл. G01S 13/02, 2012 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ МАЛОРАЗМЕРНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2524399C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННО-ЧУВСТВИТЕЛЬНОГО ПОИСКА МАЛОРАЗМЕРНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2557251C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННО-ЧУВСТВИТЕЛЬНОГО ОБНАРУЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2546329C1 |
| СПОСОБ СКРЫТНОГО ОБНАРУЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2521608C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2524401C1 |
| СПОСОБ СКРЫТНОЙ РАДИОЛОКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2529483C1 |
| СПОСОБ СКРЫТНОГО МОНИТОРИНГА РАДИОМОЛЧАЩИХ ОБЪЕКТОВ | 2018 |
|
RU2724923C2 |
| СПОСОБ СКРЫТНОГО ОБНАРУЖЕНИЯ РАДИОМОЛЧАЩИХ ОБЪЕКТОВ | 2018 |
|
RU2770176C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННО-ЧУВСТВИТЕЛЬНОГО РАДИОКОНТРОЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2546330C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ РАДИОМОЛЧАЩИХ ОБЪЕКТОВ | 2018 |
|
RU2716006C2 |
Изобретение относится к радиотехнике и может быть использовано в системах контроля наземного, морского и воздушного пространства с использованием прямых и рассеянных объектами радиосигналов, излучаемых множеством неконтролируемых и контролируемых передатчиков радиоэлектронных систем различного назначения. Достигаемый технический результат - повышение вероятности поиска малоразмерных подвижных объектов. Указанный результат достигается за счет выбора передатчиков, совмещенных в пространстве и излучающих на множестве частот узкополосные и широкополосные радиосигналы, а также применения новой совокупности операций адаптивной и комбинированной обработки прямых и рассеянных объектами радиосигналов выбранных передатчиков. 1 ил.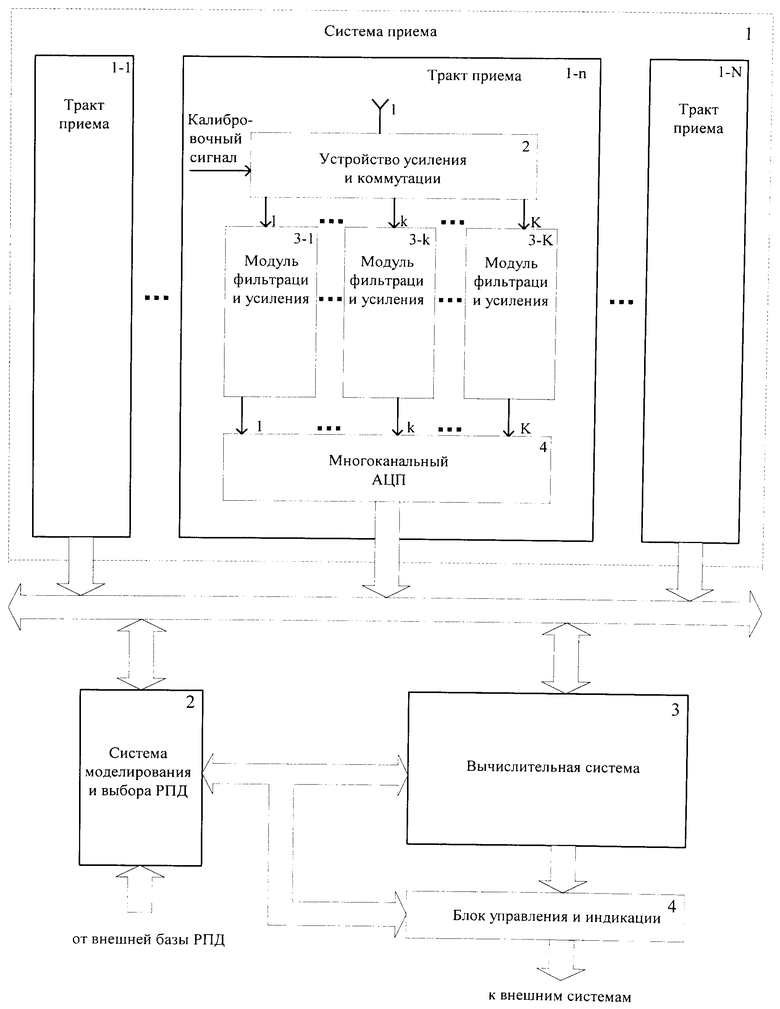
Способ поиска малоразмерных подвижных объектов, заключающийся в том, что используют прямые и рассеянные подвижными объектами радиосигналы, излучаемые передатчиками радиоэлектронных систем различного назначения, отличающийся тем, что выбирают передатчики, совмещенные в пространстве и излучающие на множестве частот узкополосные и широкополосные радиосигналы, синхронно принимают на множестве частот поиска многолучевые сигналы, включающие прямые и рассеянные радиосигналы, синхронно преобразуют принятые радиосигналы в цифровые сигналы, из цифровых сигналов формируют и запоминают узкополосные и широкополосные опорные и разведываемые сигналы для заданных азимутально-угломестных направлений приема, преобразуют каждый узкополосный опорный сигнал s(i), i=1, …, Ki - номер частоты узкополосного радиосигнала в матричный сигнал комплексной фазирующей функции A(i), включающей гипотетические сигналы, рассеиваемые каждым потенциальным объектом, запоминают матричные сигналы A(i), для каждого l-го азимутально-угломестного направления приема преобразуют каждый узкополосный разведываемый сигнал в сигнал комплексного двумерного изображения  , где A(i)H - матрица, эрмитово сопряженная с A(i), сигнал запоминают и используют в качестве начального приближения, а также итерационно формируют зависящий от предыдущего решения вспомогательный матричный сигнал
, где A(i)H - матрица, эрмитово сопряженная с A(i), сигнал запоминают и используют в качестве начального приближения, а также итерационно формируют зависящий от предыдущего решения вспомогательный матричный сигнал  ,
,  - z-й элемент вектора
- z-й элемент вектора  , k=1, 2, … - номер итерации, и сигнал очередного приближения двумерного изображения
, k=1, 2, … - номер итерации, и сигнал очередного приближения двумерного изображения  , где λ - множитель Лагранжа, до тех пор, пока номер текущей итерации не превысит заданный порог, усредняют по частоте модули
, где λ - множитель Лагранжа, до тех пор, пока номер текущей итерации не превысит заданный порог, усредняют по частоте модули  элементов текущих двумерных изображений
элементов текущих двумерных изображений  , определяют по максимумам усредненного двумерного изображения
, определяют по максимумам усредненного двумерного изображения  число рассеянных сигналов и фиксируют значения бистатической дальности d(p) и бистатической скорости ν(p) каждого p-го рассеянного сигнала, преобразуют каждый широкополосный опорный сигнал s(j), j=1, …, Kj - номер частоты широкополосного радиосигнала в матричный сигнал комплексной фазирующей функции
число рассеянных сигналов и фиксируют значения бистатической дальности d(p) и бистатической скорости ν(p) каждого p-го рассеянного сигнала, преобразуют каждый широкополосный опорный сигнал s(j), j=1, …, Kj - номер частоты широкополосного радиосигнала в матричный сигнал комплексной фазирующей функции  , включающей гипотетические сигналы, рассеиваемые каждым потенциальным объектом с нулевой и найденной бистатической скоростью ν(p) p-го рассеянного сигнала, запоминают матричные сигналы , итерационно преобразуют каждый широкополосный разведываемый сигнал
, включающей гипотетические сигналы, рассеиваемые каждым потенциальным объектом с нулевой и найденной бистатической скоростью ν(p) p-го рассеянного сигнала, запоминают матричные сигналы , итерационно преобразуют каждый широкополосный разведываемый сигнал  с использованием матричного сигнала комплексной фазирующей функции в сигнал текущего одномерного изображения
с использованием матричного сигнала комплексной фазирующей функции в сигнал текущего одномерного изображения  p-го рассеянного сигнала до тех пор, пока номер текущей итерации не превысит заданный порог, усредняют по частоте модули
p-го рассеянного сигнала до тех пор, пока номер текущей итерации не превысит заданный порог, усредняют по частоте модули  элементов текущих одномерных изображений p-го рассеянного сигнала
элементов текущих одномерных изображений p-го рассеянного сигнала  , определяют по максимумам усредненного одномерного изображения
, определяют по максимумам усредненного одномерного изображения  уточненное значение бистатической дальности
уточненное значение бистатической дальности  p-го рассеянного сигнала, по значениям выбранного азимутально-угломестного направления приема разведываемых сигналов, бистатической скорости ν(p) и уточненной бистатической дальности каждого p-го рассеянного сигнала обнаруживают и определяют пространственные координаты малоразмерных подвижных объектов.
p-го рассеянного сигнала, по значениям выбранного азимутально-угломестного направления приема разведываемых сигналов, бистатической скорости ν(p) и уточненной бистатической дальности каждого p-го рассеянного сигнала обнаруживают и определяют пространственные координаты малоразмерных подвижных объектов.
| СПОСОБ ПАССИВНОГО РАДИОМОНИТОРИНГА ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2440588C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2444755C1 |
| МЕТКА РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ ОБЪЕКТА И СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И КОНТРОЛЯ ОБЪЕКТОВ | 2007 |
|
RU2371734C2 |
| СПОСОБ ЛОКАЛИЗАЦИИ ИСТОЧНИКОВ ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ ДЕКАМЕТРОВОГО ДИАПАЗОНА | 2009 |
|
RU2408895C2 |
| Сборная железобетонная крепь для горных выработок | 1957 |
|
SU112446A1 |
| JP 6213943 A, 05.08.1994 | |||
| US 5923285 A1, 29.03.2006 | |||
| WO 2003079041 A3, 25.09.2003 | |||
| EP 1471364 A2, 27.10.2004. | |||

