Настоящее изобретение относится к авиации.
Общим местом для всех ЛА, использующих для взлета подъемные воздушные винты, является стремление конструкторов увеличить эффективность этих винтов, поскольку потребная мощность на взлете в разы больше, чем мощность потребная для горизонтального полета, что накладывает ощутимые ограничения на весовую эффективность ЛА и стоимость его эксплуатации.
Известен летательный аппарат Cora [1] разработки предприятия Wisk (ранее - KittyHawk Corp.) Mountain View, California, USA (https://evtol.news/kitty-hawk-cora/). Для создания подъемной силы данный летательный аппарат имеет специальные подъемные тянущие воздушные винты (ВВ), позволяющие летательному аппарату (ЛА), совершающему горизонтальный полет за счет создания аэродинамической подъемной силы, совершать вертикальные взлет и посадку, в том числе, на неподготовленные и/или ограниченные по площади площадки. При этом подъемные ВВ имеют фиксированную плоскость вращения и вынесены на специальных балках за пределы горизонтальной проекции конструкции ЛА таким образом, чтобы площадь, ометаемая подъемными ВВ, не была затенена или затенялась минимально планером ЛА. Такое решение позволяет во время взлета или посадки добиться тяги подъемных ВВ максимально близкой к тяге, которую может развить идентичный по конструкции и режиму работы, свободный от затенения ВВ. При наличии в таком ЛА маршевого ВВ, такой летательный аппарат обладает достоинством очень простого и надежного (легко обеспечить устойчивость и управляемость) переходного режима полета. Переход между режимами вертикального взлёта/посадки и горизонтального полёта такой аппарат осуществляет за счёт разгона или торможения с помощью маршевого движителя. При этом, чем выше скорость горизонтального полёта такого ЛА, тем меньше потребная тяга, которую должны создавать подъемные ВВ. Можно сказать, что в режиме вертикального взлета такой ЛА взлетает, как мультикоптер, а в режиме горизонтального полета совершает полет, как самолет. Данное техническое решение обладает рядом недостатков. Так, недостатком такой схемы ЛА является то, что подъемные винты вынесены на балках, направленных вдоль продольной оси ЛА. Следовательно, во время вертикального взлета и посадки создаются дополнительные изгибающие и крутящие моменты, что требует усиления конструкции, а это, в совокупности с необходимостью вводить в конструкцию вышеупомянутые балки, увеличивает массу конструкции ЛА. Кроме того, такие ВВ, их моторы и балки, на которых они установлены, создают существенное дополнительное сопротивление среды в горизонтальном полете, для чего требуется увеличение мощности, а значит, и массы маршевого двигателя, что ведёт к повышению расхода топлива/энергии. Перечисленные недостатки снижают весовую эффективность описанного выше ЛА и ухудшают его аэродинамическое качество.
Известен летательный аппарат Vahana [2], созданный организацией А3 (Acubed, центр инноваций корпорации AirbusSE), Silicon Valley, USA (https://acubed.airbus.com/projects/vahana/). Для создания подъемной силы данный летательный аппарат имеет специальные подъемные тянущие ВВ, позволяющие ЛА, совершающему горизонтальный полет за счет создания аэродинамической подъемной силы, совершать вертикальный взлет и посадку в том числе на неподготовленные и/или ограниченные по площади площадки. Подъемные ВВ данного летательного аппарата во время взлета/посадки также располагаются таким образом, чтобы площадь, ометаемая подъемными ВВ, была не затенена или затенялась минимально планером ЛА. Такое решение позволяет во время взлета или посадки добиться тяги подъемных ВВ максимально близкой к тяге, которую может развить идентичный по конструкции и режиму работы, свободный от затенения ВВ. Конструкция данного летательного аппарата предполагает изменение положения ВВ при переходе между режимом взлёта/посадки и режимом горизонтального полёта. Во время вышеназванного перехода между режимами полета, ВВ, расположенные на планере ЛА изменяют свое положение и начинают выполнять роль маршевых, то есть из режима вертикального взлета или посадки в режим горизонтального полета такой аппарат переводится за счет трансформации конструкции планера ЛА (в данном случае за счет поворота несущих поверхностей будь то крылья или оперение, на которых расположены ВВ). Можно сказать, что в режиме вертикального взлета/посадки такой ЛА взлетает как мультикоптер, а в режиме горизонтального полета совершает полет, как самолет. Данное техническое решение обладает рядом недостатков. Так, недостатком такой схемы ЛА является сравнительно сложный и ненадежный переходный режим полета (тяжело обеспечить устойчивость и управляемость ЛА). С точки зрения весовой эффективности, силы и моменты от подъемных винтов не создают значительных дополнительных изгибающих и крутящих моментов, а также воспринимаются почти теми же элементами конструкции, которые воспринимают аэродинамические силы в горизонтальном полете. Однако поворотные узлы увеличивают сложность конструкции, увеличивают её вес и стоимость, уменьшают надежность ЛА. Кроме того, во время вертикального взлета и посадки подъемные ВВ работают в других режимах, чем во время горизонтального полета. Поэтому они либо обладают меньшим коэффициентом полезного действия (КПД) на взлете/посадке, либо меньшим КПД во время горизонтального полета. Отчасти задача увеличения КПД воздушных винтов решается в конструкции данного летательного аппарата за счет использования ВИШ (винт изменяемого шага), но это решение также увеличивает массу и стоимость конструкции, уменьшает её надежность. Перечисленные недостатки снижают весовую и энергетическую эффективность данного ЛА.
Наиболее близким техническим решением, принятым нами в качестве прототипа, является устройство «Convertible helicopter-airplane», патент США на изобретение №2478847. Данный летательный аппарат имеет фюзеляж, несущие плоскости и оперение, выполняет горизонтальный полёт за счёт создания аэродинамической подъёмной силы и при этом способен выполнять вертикальные взлёт и посадку, не нуждаясь в пробеге и, таким образом, способен совершать взлёт и посадку в том числе на неподготовленные и/или ограниченные по размеру площадки. Данный летательный аппарат имеет два специальных толкающих ВВ изменяемого шага, размещённые симметрично по обеим сторонам от фюзеляжа с опорой на элементы несущих плоскостей. Вышеупомянутые ВВ управляемо изменяют положение, в режиме взлёта/посадки находясь под планёром ЛА, таким образом, выполняя роль подъёмных ВВ, при этом плоскость их вращения отнесена ниже планёра ЛА. При переходе от режима взлёта/посадки в режим горизонтального полёта, вышеупомянутые ВВ, расположенные под планером ЛА, изменяют свое положение и начинают выполнять роль толкающих маршевых ВВ, то есть из режима вертикального взлета/посадки в режим горизонтального полета такой аппарат переводится за счет изменения направления удлинённых валов вышеупомянутых ВВ при неподвижных элементах конструкции планёра.
Помимо вышеупомянутых ВВ, попеременно выполняющих функции подъёмных и маршевых, данное устройство снабжено управляющим толкающим ВВ, смонтированным по продольной оси фюзеляжа в хвостовой его части вплотную к фюзеляжу и предназначенным для управления летательным аппаратом в поперечной и вертикальной осях в режиме взлёта/посадки. Ось вращения управляющего ВВ может быть отклонена в стороны на определённый угол, при этом отклонение связано с отклонением определённых рулей. При этом управляющий ВВ автоматически флюгируется при остановке его вращения в горизонтальном полёте и не участвует в создании аэродинамической подъёмной силы. Проблема затенения элементами планёра площади, ометаемой ВВ, выполняющими функцию подъёмных, в режиме взлёта/посадки, решается за счёт того, что упомянутые ВВ в данных режимах полёта располагаются ниже несущих плоскостей и имеют «необычно большой диаметр (непрактичный применительно к традиционным аэропланам по причине требований к клиренсу)», таким образом, значительная часть ометаемой ВВ, выполняющими функцию подъёмных, площади в режиме взлёта/посадки находится за пределами проекции несущих плоскостей. Кроме того, ВВ, выполняющие функцию подъёмных, в режиме взлёта/посадки отнесены от несущих плоскостей на некоторое расстояние, определяемое тем, что удлинённые валы ВВ, выполняющих функцию подъёмных, в режиме взлёта/посадки также служат опорами летательного аппарата в положении на земле.
Данное техническое решение обладает рядом недостатков. Так, недостатком такой схемы ЛА является сравнительно сложный и ненадежный режим полета, переходный от режима взлёта/посадки к горизонтальному полёту (тяжело обеспечить устойчивость и управляемость ЛА), для чего применяется управляющий ВВ, усложняющий конструкцию. С точки зрения весовой эффективности, силы и моменты от подъемных винтов не создают значительных дополнительных изгибающих и крутящих моментов, а также воспринимаются почти теми же элементами конструкции, которые воспринимают аэродинамические силы в горизонтальном полете. Однако поворотные узлы увеличивают сложность конструкции, увеличивают её вес и стоимость, уменьшают надежность ЛА. Поскольку валы ВВ служат опорами летательного аппарата при положении на земле, ВВ снабжены выступающими амортизаторами, что также увеличивает массу и стоимость конструкции, уменьшают её надежность. Перечисленные недостатки снижают весовую и энергетическую эффективность данного ЛА. Проблема затенения элементами планёра площади, ометаемой подъемными ВВ в режиме взлёта/посадки в отношении технического решения, принятого нами в качестве прототипа, по мнению его авторов, решается самим фактом размещения толкающих подъёмных ВВ ниже несущих плоскостей. Расстояние, на которое ВВ в нижнем положении отнесены от элементов планёра, определяется тем, на какое расстояние планёр должен быть поднят над поверхностью опоры в положении на земле, а также шириной несущих плоскостей ЛА, за пределы которого ВВ должны быть выведены при работе в режиме маршевых. В отношении ЛА, принятого нами в качестве прототипа, не представлено никаких доказательств эффективности предложенного подхода борьбы с затенением ВВ элементами конструкции планёра. Не даны подтверждения натурными экспериментами, либо расчетами, не указаны размеры, пропорции, расстояния между элементами конструкции, реализация которых позволит во время взлета или посадки добиться тяги подъемных ВВ максимально близкой к тяге, которую может развить идентичный по конструкции и режиму работы, свободный от затенения ВВ, а также корректировать расстояние от подъёмных ВВ до элементов планёра и пропорции элементов ЛА при реализации ЛА, принятого нами в качестве прототипа, в различном масштабе.
Целью заявляемого изобретения является создание летательного аппарата, выполняющего горизонтальный полёт за счёт создания аэродинамической подъёмной силы, способного выполнять вертикальные взлёт и посадку, обладающего простой конструкцией и высокой весовой и энергетической эффективностью.
На Фиг. 1 показан общий вид варианта заявляемого летательного аппарата в проекциях сверху, сбоку, спереди. Также на Фиг. 1 показана схема формирования элементом планера заявляемого ЛА площади затенения ометаемой площади подъёмного ВВ.
На Фиг. 2 показана схема экспериментальной установки, применённой для расчёта и обоснования расстояния, на которое подъёмные ВВ заявляемого ЛА должны быть отнесены от затеняющих элементов планёра.
На Фиг. 3 показаны графики, полученные в результате выполнения эксперимента. На Фиг. 4 показаны графики, полученные в результате выполнения эксперимента. На Фиг. 5 показаны графики, полученные в результате выполнения эксперимента. На Фиг. 6 показаны графики, полученные в результате выполнения эксперимента. На Фиг. 7 показаны графики, полученные в результате выполнения эксперимента. На Фиг. 8 показаны графики, полученные в результате выполнения эксперимента.
На Фиг. 9 показан общий вид ЛА, элементы конструкции которого применены во время выполнения эксперимента в проекциях сверху, сбоку, спереди. Также на Фиг. 9 показана схема формирования элементом планера ЛА, элементы конструкции которого применены во время выполнения эксперимента, площади затенения ометаемой площади подъёмных ВВ.
На Фиг. 10 показана схема экспериментальной установки, применённой для расчёта и обоснования расстояния, на которое подъёмные ВВ заявляемого ЛА должны быть отнесены от затеняющих элементов планёра.
Заявляемый летательный аппарат показан на Фиг.1. Он имеет фюзеляж, несущие плоскости (2) и оперение и выполняет горизонтальный полёт за счёт создания аэродинамической подъёмной силы и при этом способен выполнять вертикальные взлёт и посадку, не нуждаясь в пробеге и, таким образом, способен совершать взлёт и посадку, в том числе, на неподготовленные и/или ограниченные по размеру площадки.
Заявляемый летательный аппарат имеет специальные толкающие подъёмные ВВ (1) той или иной конструкции, например, четыре толкающих подъёмных ВВ, имеющие диаметр (4) размещённые при помощи балок (8), с опорой на элементы планера заявляемого ЛА, например, на лонжероны несущих плоскостей (2). Допускается иное количество подъёмных ВВ (1) и иные элементы планера ЛА для опоры толкающих подъёмных ВВ (1). Подъёмные ВВ (1) находятся под планером ЛА, при этом плоскости их вращения отнесены ниже элементов планера, с опорой на которые они размещены, на расстояние (3) и ориентированы горизонтально. При этом подъемную силу от подъемных ВВ (1) воспринимают те же элементы конструкции летательного аппарата, что воспринимают нагрузку во время его горизонтального полета. При переходе от режима взлёта/посадки в режим горизонтального полёта, меняется режим работы подъёмных ВВ (1), но не положение, и не конфигурация несущих плоскостей планера. Направление осей вращения подъёмных ВВ (1) относительно планера при переходе заявляемого ЛА от режима взлёта/посадки в режим горизонтального полёта остаётся неизменным, однако допускается вариант размещения подъёмных ВВ (1) таким образом, чтобы после перехода заявляемого ЛА в режим горизонтального полёта изменялось положение подъёмных ВВ (1), например, путём складывания тем или иным образом в обтекатель с целью уменьшения площади передней проекции заявляемого ЛА и снижения сопротивления среды.
Помимо подъёмных ВВ (1), заявляемое устройство снабжено маршевым толкающим ВВ (7) той или иной конструкции, смонтированным по продольной оси фюзеляжа в хвостовой его части и обеспечивающим горизонтальное движение ЛА.
Возможны варианты заявляемого летательного аппарата, при которых горизонтальное движение ЛА обеспечивается тянущим маршевым ВВ, смонтированным по продольной оси фюзеляжа в носовой его части, либо, например, реактивным двигателем того или иного расположения.
Из режима взлета/посадки в режим горизонтального полета заявляемый ЛА переводят разгоном или торможением с помощью маршевого толкающего ВВ (7), при этом при возрастании горизонтальной скорости заявляемого ЛА снижают тягу, создаваемую подъемными ВВ (1). Можно сказать, что в режиме вертикального взлета и посадки такой летательный аппарат взлетает и садится как мультикоптер, а в режиме горизонтального полета совершает полет как самолет. Эти режимы могут сочетаться и плавно переходить один в другой без ущерба для устойчивости и управляемости заявляемого ЛА.
Балки (8) на которых вынесены под планер подъемные ВВ, работают преимущественно на сжатие, не выполняют иных функций, например, таких, как удержание летательного аппарата в положении на земле и, следовательно, имеют относительно простую конструкцию и небольшой вес, что повышает весовую эффективность заявляемого летательного аппарата относительно устройства, принятого нами в качестве прототипа. Также балки (8) могут быть снабжены обтекателями, уменьшающими сопротивление воздуха.
Притом, что подъёмные ВВ (1) заявляемого летательного аппарата являются толкающими и находятся под планером летательного аппарата, для решения проблемы затенения элементами планера площади, ометаемой подъёмными ВВ (1) в режиме взлёта/посадки, необходимо, чтобы подъёмные ВВ (1) были отнесены от затеняющих элементов планера на расстояние (3), при котором тяга подъёмных ВВ (1) будет максимально приближена к тяге аналогичных по конструкции и режиму работы ВВ, свободных от затенения.
Площадь затенения (5) ометаемой площади (6) подъёмного ВВ (1) определяется как доля, в процентах, площади проекции затеняющей поверхности (2), на ометаемую площадь (6) подъёмного ВВ (1) относительно ометаемой площади (6).
Для расчёта и обоснования расстояния (3), на которое подъёмные ВВ (1) заявляемого ЛА должны быть отнесены от затеняющих элементов планера таким образом, чтобы тяга подъёмных ВВ (1) была максимально приближена к тяге аналогичных по конструкции и режиму работы ВВ, свободных от затенения, были проведены эксперименты.
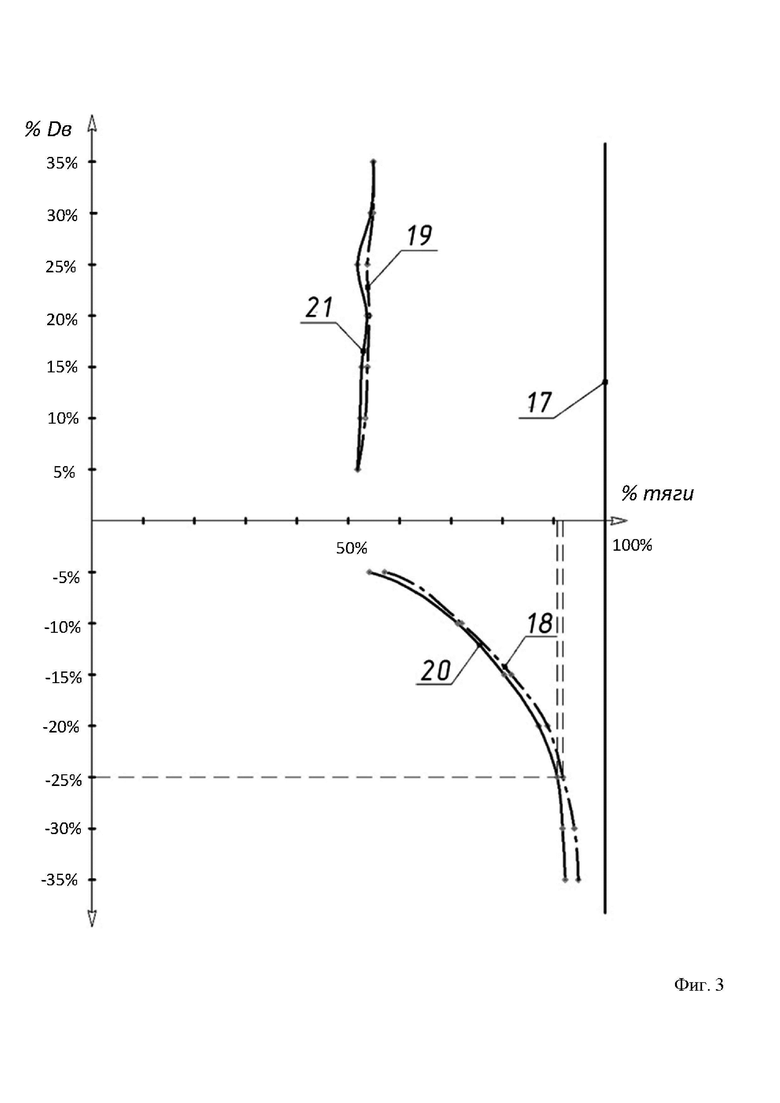
Схема экспериментальной установки изображена на Фиг. 2. Применяемый в эксперименте толкающий ВВ (9) по условиям эксперимента может быть расположен на различном расстоянии (10) от пластины, имитирующей элемент планера и осуществляющей затенение (далее - затеняющей поверхности (11)). Плоскость вращения ВВ (9) параллельна затеняющей поверхности (11). Площадь затенения (12) ометаемой площади (13) воздушного винта (9) определяется как доля, в процентах, площади проекции затеняющей поверхности(11), на ометаемую площадь(13) воздушного винта (9) относительно ометаемой площади (13). В условиях эксперимента площадь затенения (12) составляет 47%. Расстояние (10) от затеняющей поверхности (11) до плоскости вращения воздушного винта (9) изменяется в процентах диаметра (14) воздушного винта (9). Мощность, потребляемая установкой, фиксируется измерителем напряжения и тока (15), а тяга винта измеряется весами (16). В стенде ВВ (9) находится в перевернутом положении относительно затеняющей поверхности (11) и, таким образом, не создает подъемную тягу, а прижимает весь стенд к весам (16). При данном положении ВВ (9), расположенный над затеняющей поверхностью (11) соответствует подъемному ВВ, расположенному под планером заявляемого ЛА, как показано на Фиг.1 и наоборот, ВВ (9), расположенный под затеняющей поверхностью (11) соответствует подъемному ВВ, расположенному над планером ЛА.
График, полученный в результате эксперимента изображен на Фиг. 3, при этом в графике учтен перевернутый характер стенда, и кривые соответствуют нормальному расположению подъемного ВВ относительно планера ЛА. График построен для различного удаления ВВ (9) от затеняющей поверхности (11) для двух режимов работы ВВ (9). Тяга ВВ (9) отнесена к тяге идентичного ВВ, свободного от затенения (кривая 17) и указана в % от неё. Кривые (18) и (19) соответствуют потребляемой мощности 46,5 Вт, кривые (20) и (21) соответствуют потребляемой мощности 72,5 Вт. Для каждого положения затеняющей поверхности (11) относительно ВВ (9) есть видеофиксация выполнения эксперимента [3]. Из графика, изображенного на Фиг. 3 явным образом следует, что по мере увеличения указанного на Фиг. 2 расстояния (10) от ВВ (9) до затеняющей поверхности (11), ощутимо растет тяга и соответственно эффективность ВВ (9), т.е. уменьшается влияние затенения, оказываемого затеняющей поверхностью (11) на тягу ВВ (9), что демонстрируют кривые (18) и (20), изображенные на Фиг. 3. Тот же эффект ожидается при увеличении расстояния (3) между плоскостью вращения ВВ (1) и планером, что соответствует увеличению длины балки (8), показанной на Фиг. 1. В то же время анализ кривых 19 и 21 графика, показанного на Фиг. 3 указывает на то, что при расположении ВВ (9) над затеняющей поверхностью (11) не возникает существенного выигрыша в эффективности по мере увеличения расстояния (10) от ВВ (9) до затеняющей поверхности (11).
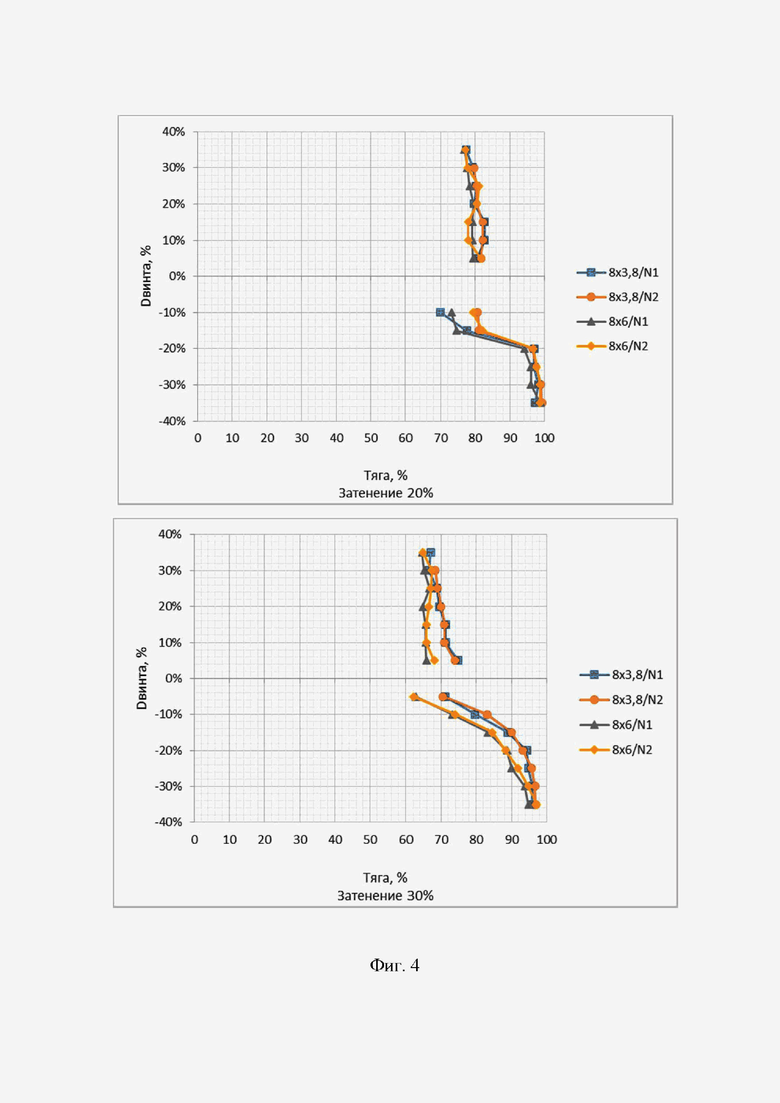
Описанный эксперимент обладает тем недостатком, что в его рамках рассмотрен только один возможный частный случай, при котором форма затеняющей поверхности (11) - трапеция, а площадь затенения (12) составляет 47%. Кроме того, стенд имеет ограниченные размеры, и диаметр ВВ (9), применённого в процессе эксперимента составляет 8 дюймов, то есть, применительно к полноразмерному ЛА результат может быть другим. Чтобы устранить первый недостаток, на данном стенде была проведена серия замеров, при которых площадь затенения (12) изменялась от 20 до 100% с шагом 10%, а расстояние (10) от затеняющей поверхности (11) до плоскости вращения ВВ (9) изменялось от 5 до 35% от диаметра ВВ (9) с шагом в 5%. Замеры производились на двух уровнях мощности (N1 и N2) и для двух ВВ (9) разного шага, - 8х3,6 и 8х6. В результате получена серия графиков, приведённых на Фиг. 4, Фиг. 5, Фиг. 6 и Фиг. 7, демонстрирующих зависимость тяги от расстояния (10) от плоскости вращения ВВ (9) до затеняющей поверхности (11) для двух уровней мощности и двух ВВ(9) различного шага.
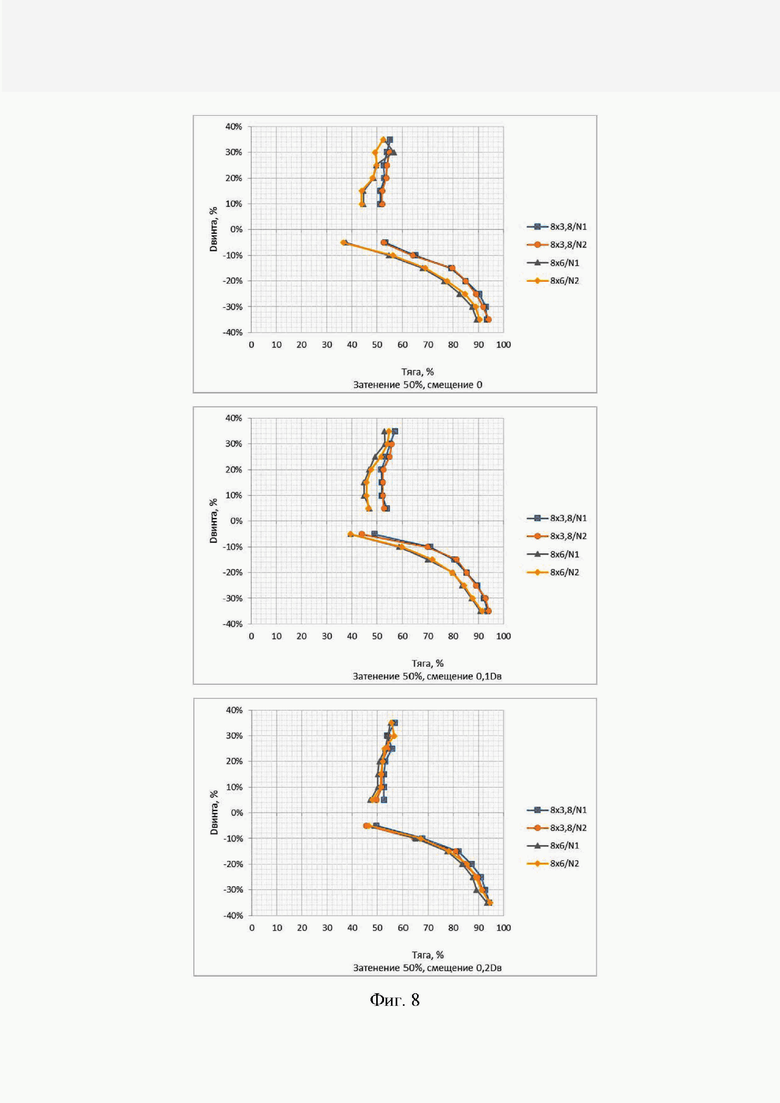
Кроме того, были дополнительно произведены замеры тяги ВВ (9), при смещении затеняющей поверхности(11) относительно оси вращения ВВ (9) по хорде затеняющей поверхности (11) на 10 и 20% от диаметра (14) воздушного винта (9), результаты данного эксперимента показаны на Фиг. 8. Как показывают представленные на Фиг.8 графики, существенного изменения их характера не наблюдается, хотя и обнаруживается незначительное возрастание КПД ВВ (9) по мере смещения оси его вращения вперед (к носку) по хорде затеняющей поверхности (11).
Как показывают представленные на Фиг. 3, Фиг. 4, Фиг. 5, Фиг. 6, Фиг. 7, Фиг. 8 графики, отражающие результаты выполненных экспериментов, при изменении затенения ВВ (9) от 20 до 100% с шагом 10% наблюдается возрастание тяги ВВ(9) при увеличении расстояния (10) между ВВ (9) и затеняющей поверхностью (11), при моделировании размещения ВВ (9) под планером ЛА, и несущественное изменение тяги ВВ (9), при моделировании размещения ВВ (9) над планером ЛА. В частности, при затенении ВВ, составляющем 20 и 30% и удалении плоскости вращения ВВ под затеняющую поверхность на расстояние порядка 15-20% от диаметра ВВ, эффективность ВВ составляет более 85% соответствующей характеристики свободного от затенения ВВ такого же устройства при той же мощности. Также более 85% составляет эффективность ВВ, при его удалении под затеняющую поверхность на расстояние порядка 20-25% от диаметра ВВ при затенении 40% и 50%, при аналогичном удалении на расстояние порядка 30% от диаметра ВВ для затенения 60%, и, наконец, при удалении порядка 35% от диаметра ВВ, при затенении 70-100%. Отсюда следует, что для каждого конкретного случая площади затенения ВВ, для каждого конкретного ВВ со своим конкретным режимом работы можно подобрать расстояние, на которое следует удалить от затеняющей поверхности плоскость его вращения, чтобы получить необходимую эффективность (на практике, как правило, достаточно эффективности более 85%, хотя если это позволяет компоновка ЛА, то лучше стремиться к эффективности 90-95%).
Для того, чтобы исключить возможное влияние малых размеров стенда и ВВ (9), применённых в описанном выше эксперименте, были произведены испытания полноразмерного стенда консоли несущей поверхности проекта ЛА, сходного с заявляемым, изображение которого представлено на Фиг. 9. В конструкции ЛА, представленного на Фиг.9, также, как и в конструкции заявляемого ЛА, представленного на Фиг. 1, для создания подъемной силы во время вертикального взлета и посадки используются идентичные подъемные ВВ (22), расположенные под планером (23) ЛА (в данном случае, под передним горизонтальным оперением (ПГО) и крылом). Плоскость вращения каждого из ВВ (22) отнесена на расстояние (24) от планёра, в результате чего тяга каждого из ВВ (22) составляет более 90% от тяги которую может развить идентичный по конструкции и режиму работы, свободный от затенения ВВ. В примере на Фиг. 9 площадь затенения (25) составляет 64% и площадь затенения (26) составляет 56% относительно всей площади (27), ометаемой ВВ (22), а потеря тяги ВВ (22) составляет менее10% при обоих случаях затенения, относительно тяги, которую может развить идентичный по конструкции и режиму работы, но свободный от затенения ВВ. Расстояние (24), соответствующее длине балок- пилонов (28) для всех подъемных ВВ составляет порядка 35% от диаметра (29) ВВ (22), который в случае ЛА, представленного на Фиг. 9 составляет 1,5 метра.
На Фиг. 10 представлен полноразмерный стенд для испытания эффективности подъемных воздушных винтов (30) (диаметр винтов 1,5 метра, длина консоли крыла 3,4 метра), расположенных под крылом (31). Он был испытан 15 октября 2019 года на территории АО «Концерн «МАНС», Тверская область, Зубцовский район, аэродром «Орловка».
При этом расположение ВВ (30), расстояние между ними и планёром, площади, ометаемые ВВ (30), площади затенения и иные существенные в условиях испытания параметры полностью соответствуют изложенным выше и относящимся к характеристикам ВВ (22).
Для определения эффективности подъемных винтомоторных групп (далее - ВМГ) производилось 2 группы замеров, в которых измерялись усилия в закреплённых с опорой на лонжерон (32) консоли крыла (31) пилонах (33), на которых установлены электромоторы (34) с ВВ (30). Первая группа измеряла усилие при затенении ВМГ крылом (31), вторая измеряла усилие при снятом крыле. При обработке данных вычислялся средний 0 для каждого датчика веса (35), также вычислялись средние значения максимального усилия.
Интерпретация данных производилась следующим образом: вычислялись среднее значение усилия и отклонения от среднего среди группы замеров. Вычислялась тяга винтов, затененных крылом, равная разности удвоенного усилия свободного винта и усилию затенённого винта. Эффективность ВМГ вычислялась, как отношение вычисленной тяги затененного винта к усилию свободного винта, умноженных на 100%.
Итоговая выдержка из протокола испытаний приведена в [4]. Измерения усилий на датчиках и их интерпретация показали, что эффективность данных ВМГ, при данной тяге свободных винтов, данном удалении от крыла и данном затенении оказалась более 90%.
Таким образом, в результате проведения серии экспериментов, при которых диаметр ВВ равнялся 8 дюймам, и в результате проведения эксперимента с полноразмерным стендом, где диаметр ВВ равнялся 1,5 м, было доказано то, что при размещении подъемного ВВ с опорой на элементы планера (будь то несущие поверхности, такие как крыло и оперение, или другие части планера, например, фюзеляж), в условиях, при которых ометаемая площадь вышеназванного ВВ по нормали к плоскости его вращения затенена проекцией планера более чем на 20%, можно получить тягу вышеназванного подъёмного ВВ, составляющую более 85% от тяги идентичного незатененного ВВ при размещении вышеназванного подъёмного ВВ под планером на расстоянии, варьировавшем в условиях экспериментов от 15 до 35% диаметра вышеназванного подъёмного ВВ, причем с увеличением вышеназванного расстояния в условиях эксперимента тяга возрастала.
Для реализации цели заявляемого изобретения, на основании описанных выше экспериментов, в отношении описанного выше заявляемого ЛА, независимо от его размера и варианта исполнения, толкающие подъёмные ВВ (1), находящиеся под планером заявляемого ЛА, должны быть отнесены от поверхности элементов планера, с опорой которые они расположены, на расстояние (3), составляющее не менее 15% диаметра вышеназванных ВВ.
В результате осуществления заявляемого изобретения, получаем летательный аппарат, выполняющий горизонтальный полёт за счёт создания аэродинамической подъёмной силы, способный выполнять вертикальные взлёт и посадку, обладающий простой конструкцией и высокой весовой и энергетической эффективностью.
Используемые материалы:
[1] Летательный аппарат Cora, компании KittyHawk. Официальный сайт: https://cora.aero Видео: https://www.youtube.com/watch?v=LeFxjRMv5U8
[2] Летательный аппарат Vahana, компании A³ (подразделение Airbus). Официальный сайт: https://vahana.aero Видео: https://vimeo.com/221950605
[3] Ссылка на видеофиксацию эксперимента с модельным экспериментом крыла: https://yadi.sk/d/F5H6ywLf3aaGJa
[4] Протокол №1/15.10.19 «Проверка эффективности подъемных ВМГ, расположенных под крылом»: https://disk.yandex.ru/i/5HafXc0Zd4q_6A
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2024 |
|
RU2838699C1 |
| Самолёт вертикального взлёта и посадки | 2016 |
|
RU2641952C1 |
| Винтокрылый летательный аппарат | 2019 |
|
RU2720746C1 |
| Летательный аппарат вертикального взлёта и посадки с изменяемым направлением тяги движителей | 2019 |
|
RU2790454C2 |
| Конвертоплан | 2019 |
|
RU2723516C1 |
| Летательный аппарат вертикального взлета и посадки с дополнительными грузовыми модулями и выдвигаемыми воздушными винтами | 2021 |
|
RU2759061C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1990 |
|
RU2014247C1 |
| КОНВЕРТОПЛАН | 2016 |
|
RU2635431C1 |
| Беспилотный винтокрыл | 2023 |
|
RU2831846C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С ВОЗДУШНЫМИ ВИНТАМИ НА ПОВОРОТНЫХ ЗАКРЫЛКАХ КРЫЛА | 2021 |
|
RU2757693C1 |







Изобретение относится к области авиации, в частности к конструкциям винтокрылых летательных аппаратов. Летательный аппарат содержит фюзеляж, несущие плоскости, оперение, толкающий воздушный винт, размещённый на хвостовой оконечности фюзеляжа, или тянущий воздушный винт на носовой оконечности фюзеляжа, или реактивный двигатель. Толкающие воздушные винты размещены с опорой на элементы планера летательного аппарата таким образом, что воздушные винты находятся под планером летательного аппарата. При этом плоскости их вращения отнесены ниже планера летательного аппарата и ориентированы горизонтально. Воздушные винты, находящиеся под планером летательного аппарата, отнесены от поверхности элементов планера, с опорой на которой они расположены, на расстояние, составляющее не менее 15% диаметра воздушных винтов. Обеспечивается высокая весовая и энергетическая эффективность. 10 ил.
Летательный аппарат, имеющий фюзеляж, несущие плоскости, оперение, толкающий воздушный винт, размещённый на хвостовой оконечности фюзеляжа, или тянущий воздушный винт, размещенный на носовой оконечности фюзеляжа, или реактивный двигатель, толкающие воздушные винты, размещённые с опорой на элементы планера летательного аппарата таким образом, что воздушные винты находятся под планером летательного аппарата и при этом плоскости их вращения отнесены ниже планера летательного аппарата и ориентированы горизонтально, отличающийся тем, что воздушные винты, находящиеся под планером заявляемого летательного аппарата, отнесены от поверхности элементов планера, с опорой на которые они расположены, на расстояние, составляющее не менее 15% диаметра вышеназванных воздушных винтов.
| Беспилотный летательный аппарат вертикального взлета и посадки | 2017 |
|
RU2716391C2 |
| ПЕРЕДАЧА | 2011 |
|
RU2478847C2 |
| US 20150344134 A1, 03.12.2015 | |||
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ И СПОСОБ УПРАВЛЕНИЯ ЕГО ПОЛЕТОМ | 2016 |
|
RU2638221C2 |
| CN 209479974 U, 11.10.2019. | |||

