Изобретение относится к области авиации, в частности к конструкциям беспилотных летательных аппаратов.
Наиболее близким аналогом к заявляемому изобретению является беспилотный летательный аппарат вертикального взлета и посадки, известный из RU 2716391. Беспилотный летательный аппарат вертикального взлета и посадки выполнен по аэродинамической схеме «тандем» и содержит фюзеляж с неподвижными передним и задним крыльями обратной стреловидности, размещенными на фюзеляже со смещением заднего крыла по высоте вверх и назад относительно переднего крыла, с углом установки заднего крыла по тангажу больше переднего крыла. Консоли крыльев снабжены органами аэродинамического управления, выполненными с возможностью зависания вниз под углом 90°, концевыми обтекателями, отогнутыми вниз перпендикулярно плоскости крыла. На консолях крыльев расположены четыре подъемные винтомоторные группы, размещенные симметрично относительно центра масс указанного аппарата и содержащие электромоторы и наружные однолопастные профилированные винты, закрепленные на электромоторах в горизонтальных шарнирах с возможностью самоориентирования лопастей по набегающему потоку. Аппарат также содержит маршевую винтомоторную группу, выполненную толкающей, с размещением ее в конце задней части фюзеляжа. Обеспечивается снижение веса, повышение надежности.
Однако однолопастные винты требуют значительного противовеса для балансировки их относительно оси вращения. Масса балансировочного груза будет в несколько раз больше массы лопасти, и несущий однолопастный винт будет весить как многолопастный (4-х или более) того же диаметра. Также однолопастный винт смещает точку приложения подъёмной силы в сторону от оси вращения вала двигателя и таким образом вызывает дополнительные боковые нагрузки на двигатель, что снижает его ресурс и требует дополнительного усиления моторамы.
На эскизах летательного аппарата несущие винты расположены над крылом. Расположение несущих винтов над крылом существенно снижает вертикальную тягу, т.к. скорость потока за винтом значительно превышает скорость потока перед винтом, и плоскость крыла существенно тормозит поток и образует теневую зону, где формируются вихри, и происходит потеря энергии. Отклонение механизации крыла на 90 градусов уменьшает площадь крыла и частично уменьшает потери, но не достаточно. Данная проблема решается расположением несущих винтов под крылом и определённым соотношением площади ометаемой поверхности несущих винтов к крылу.
Также расположение винтомоторных групп на законцовках крыла обратной стреловидности тянет за собой усиление и утяжеление конструкции крыла, чтобы компенсировать моменты на кручение по его размаху. При этом не отмечается наличие установочных углов несущих винтов относительно плоскости строительной горизонтали. Если не задать несущим винтам угол наклона для возможности движения вперёд за счёт них без создания отрицательного угла в канале тангажа, то существенно снизится диапазон эффективного применения летательного аппарата в режиме квадрокоптера при горизонтальном полёте.
В итоге указанный выше летательный аппарат будет иметь перетяжелённую конструкцию и будет недостаточно эффективным при вертикальном взлёте и посадке, а также в режиме квадрокоптера при горизонтальном полёте, что не позволит комфортным образом обеспечить ему грузоподъёмность, превышающую 15-17% от его максимальной взлётной массы (без учёта потерь на гибридную силовую установку).
Технической проблемой заявляемого изобретения является создание беспилотного летательного аппарата, который обладает большой вертикальной тягой на взлёте и увеличенной грузоподъёмностью.
Техническим результатом изобретения является решение заявленной проблемы.
Дополнительным техническим результатом является обеспечение возможности полёта тремя способами: полёт полностью на несущих винтах по принципу квадрокоптера, полёт на несущих винтах с применением источника тяги в продольной оси и подъёмной силы крыльев, полёт только на крыльях с применением источника горизонтальной тяги без участия несущих винтов.
Сущность заявляемого изобретения заключается в том, что в беспилотном летательном аппарате, выполненном по аэродинамической схеме «тандем» и содержащем фюзеляж с крыльями, на которых расположены несущие винты, источник тяги в продольной оси, переднее и заднее крылья размещены на фюзеляже со смещением заднего крыла по высоте вверх и назад относительно переднего крыла, несущие винты расположены под плоскостью крыльев, соотношение площади ометаемой поверхности несущих винтов к площади крыла составляет от 1,9 до 2,2, угол плоскости несущих винтов составляет от -7 до -15 градусов относительно плоскости строительной горизонтали летательного аппарата.
Аэрокрафтер – это беспилотный летательный аппарат вертикального взлёта и посадки, который имеет два крыла расположенных тандемом, четыре несущих винта и источник тяги в продольной оси. Характерной особенностью являются относительно небольшая площадь крыльев и большая ометаемая площадь несущих винтов (выявлен диапазон соотношения площади несущих винтов и площади крыльев), что обеспечивает большую вертикальную тягу на взлёте и увеличивает грузоподъёмность, максимально приближая аэрокрафтер к квадрокоптеру в режиме висения, а также при вертикальных взлётах и посадках.
Заявляемое изобретение поясняется фигурами 1-4, на которых изображено:
Фиг.1 – общий вид;
Фиг.2 – вид сверху;
Фиг.3 – вид сбоку;
Фиг.4 – модель.
На фигурах 1-4 позициями 1-8 показаны:
1 – несущие винты;
2 – переднее крыло;
3 – заднее крыло;
4 – фюзеляж;
5 – источник тяги в продольной оси;
6 – плоскость строительной горизонтали;
7 – плоскость несущих винтов;
8 – угол плоскости несущих винтов.
Беспилотный летательный аппарат выполнен по аэродинамической схеме «тандем» и содержит фюзеляж 4 с крыльями, на которых расположены несущие винты 1, источник тяги в продольной оси 5. Переднее 2 и заднее 3 крылья размещены на фюзеляже 4 со смещением заднего крыла 3 по высоте вверх и назад относительно переднего крыла 2. Несущие винты 1 расположены под плоскостью крыльев. Соотношение площади ометаемой поверхности несущих винтов к площади крыла составляет от 1,9 до 2,2. Угол плоскости несущих винтов 8 составляет от -7 до -15 градусов относительно плоскости строительной горизонтали 6 летательного аппарата. Угол плоскости несущих винтов 8 в полёте не меняется.
Устройство работает следующим образом:
Горизонтальный полёт аэрокрафтер может совершать тремя основными способами:
Первый способ: полёт полностью на несущих винтах по принципу квадрокоптера. Этот способ подходит для вертикального взлёта и вертикальной посадки, а также для транспортировки максимально допустимого груза на небольшое расстояние как внутри фюзеляжа, так и на внешней подвеске. Эффективность в этом случае обеспечивается углом наклона плоскости несущих винтов вперёд, что создаёт дополнительно к вертикальной тяге ещё и горизонтальную тягу при сохранении корпуса летательного аппарата в горизонтальном положении, что оптимизирует потери на лобовое сопротивление и исключает возникновение отрицательной подъёмной силы на крыльях. Также за счёт того, что несущие винты расположены под крылом, и поток воздуха, отбрасываемый ими, никуда не врезается и не обо что не тормозится, а большой диаметр несущих винтов относительно площади крыльев снижает отрицательную интерференцию воздушных винтов с элементами крыла, достигается более высокая вертикальная тяга.
Второй способ: полёт на несущих винтах с применением источника тяги в продольной оси и подъёмной силы крыльев. Этот способ подходит для транспортировки груза массой 85% от максимально допустимой нагрузки на средние расстояния внутри фюзеляжа. Эффективность в этом случае обеспечивается углом наклона плоскости несущих винтов вперёд, что создаёт дополнительно к вертикальной тяге ещё и горизонтальную тягу при сохранении корпуса летательного аппарата в горизонтальном положении, что оптимизирует потери на лобовое сопротивление и исключает возникновение отрицательной подъёмной силы на крыльях. Также дополнительная тяга маршевого двигателя позволяет увеличить и поддерживать скорость горизонтального полёта на таком уровне, на котором начинается ощутимый вклад крыльев в создание подъёмной силы и до 70% подъёмной силы может создаваться крылом.
Третий способ: полёт только на крыльях с применением источника горизонтальной тяги без участия несущих винтов. Этот способ подходит для полётов на большие расстояния с загрузкой до 70% от максимально допустимой с расположением груза внутри фюзеляжа. При этом летательный аппарат летит по принципу самолёта, что обеспечивает более высокую скорость и дальность полёта по сравнению с квадрокоптером. Для обеспечения эффективности в этом режиме переднее крыло расположено ниже заднего крыла. При этом, учитывая расположение несущих винтов под крыльями, возмущённый поток от обтекания мотогондол подъёмных двигателей и лопастей несущих винтов отдаляется от заднего крыла, уходя вниз под него, что минимизирует отрицательную интерференцию переднего и заднего крыла на крейсерском режиме полёта в данном способе.
Подтверждение важности указанных признаков аэрокрафтера.
Широкое применение воздушных винтов на небольших беспилотных летательных аппаратах различного назначения обусловлено их высокой эффективностью. Однако величина эффективной тяги винтомоторной силовой установки, необходимой для обеспечения полёта, существенно зависит от расположения воздушных винтов на летательном аппарате. Поэтому имеет большое значение компоновка винтомоторных групп. Воздушные винты и детали корпуса планера оказывают влияние друг на друга и на общую аэродинамику летательного аппарата. Вследствие этого проблема интерференции воздушных винтов и планера является одной из важнейших при аэродинамическом проектировании любого летательного аппарата. Надо отметить, что для решения этой проблемы в настоящее время используются главным образом экспериментальные методы, базирующиеся на испытаниях моделей-демонстраторов летательных аппаратов. Особенно это относится к летательным аппаратам нетрадиционных аэродинамических схем, отличающихся нестандартным расположением винтомоторной силовой установки.
Во время испытаний опытных образцов беспилотных летательных аппаратов вертикального взлёта и посадки самолётного типа с фиксированными несущими винтомоторными группами и крылом на максимальную грузоподъёмность была выявлена зависимость эффективности в вертикальных режимах от диаметра несущих винтов. Чем больше диаметр, тем эффективнее аппарат в режиме висения. Но увеличение диаметра не может быть безграничным, т.к. слишком большой диаметр несущих винтов усложняет компоновку и приводит к высоким потерям на сопротивление от них в горизонтальном полёте. Также опытном путём была выявлена минимальная площадь и форма крыльев, которая обеспечивала бы достаточную подъёмную силу на крейсерской скорости в самолётном режиме. При компоновочной схеме «тандем» с размещением несущих винтомоторных групп под крыльями оптимальные значения диаметра несущих винтов и размерности крыльев создают соотношение площади ометаемой поверхности несущих винтов к площади крыльев в интервале 1,9 – 2,2. За счёт того, что несущие винты расположены под крылом и поток воздуха, отбрасываемый ими, никуда не врезается и не обо что не тормозится, а большой диаметр несущих винтов относительно площади крыльев снижает отрицательную интерференцию воздушных винтов с элементами крыла, достигается более высокая вертикальная тяга, которая сопоставима с вертикальной тягой квадрокоптера, несущим винтам которого мешают только лучи рамы. Выход из указанных значений 1,9-2,2 в меньшую сторону уменьшает эффективность на взлёте и посадке, т.к. в целом уменьшается диаметр винта и доля его затенения крылом увеличивается, повышая отрицательную интерференцию, а выход в большую сторону уменьшает эффективность в горизонтальном полёте в самолётном режиме, увеличивая лобовое сопротивление.
На испытаниях опытных образцов беспилотных летательных аппаратов вертикального взлёта и посадки самолётного типа с фиксированными несущими винтомоторными группами и крылом было отмечено, что при горизонтальном расположении плоскости несущих винтов относительно плоскости строительной горизонтали есть существенные ограничения в полётах в квадрокоптерном режиме и некоторые трудности в переходных режимах. Для движения вперёд требуется наклонить летательный аппарат носом в низ, что создаёт отрицательный угол в канале тангажа и приводит к появлению отрицательного угла атаки на крыльях и возникновению отрицательной подъёмной силы. Это существенно увеличивает нагрузку на несущие винтомоторные группы и делает невозможным осуществление эффективного горизонтального полёта в режиме квадрокоптера. Чтобы решить данную проблему требуется наклонить плоскость несущих винтов указанным образом в пределах от -7 до -15 градусов относительно плоскости строительной горизонтали летательного аппарата. Такой наклон даёт возможность эффективно летать горизонтально на несущих винтах, т.к. не требуется создания отрицательных углов тангажа и не возникают отрицательные углы атаки на крыльях, а также реализуется при этом эффект косого обдува несущих винтов. Выход по углу наклона несущих винтов за указанные пределы в меньшую сторону не даёт возможности обеспечить существенную горизонтальную скорость в эффективном горизонтальном полёте в квадрокоптерном режиме, а выход в большую сторону снижает вертикальную тягу и повышает лобовое сопротивление.
Аэрокрафтер может сильно смещать акцент подъёмной силы с несущих винтов на крылья и переходить в режимы квадрокоптера или самолёта по необходимости. При этом возможность эффективно летать в режиме квадрокоптера отличает аэрокрафтер от беспилотных самолётов вертикального взлёта и посадки с фиксированными несущими винтами и фиксированным крылом, а возможность летать с полностью отключенными несущими винтами отличает аэрокрафтер от винтокрылов, которые используют несущие винты большого диаметра на протяжении всего полёта, что сильно повышает сопротивление и ухудшает скорость и дальность полёта.
Тандемное расположение крыльев с несущими винтами даёт возможность разместить сквозной грузовой отсек в корпусе беспилотного летательного аппарата с загрузкой через верх и сбросом через низ, что очень удобно для небольших летательных аппаратов взлётной массой до 30 килограммов.
Таким образом, можно сказать, что аэрокрафтер – это промежуточное звено между квадрокоптерами и самолётами вертикального взлёта и посадки с фиксированными несущими винтами и крылом. При этом компоновка аэрокрафтера делает его эффективным многоцелевым летательным аппаратом для решения широчайшего спектра задач. Аэрокрафтер - это универсальное решение, которого требуют развивающиеся рынки воздушных беспилотных технологий.
| название | год | авторы | номер документа |
|---|---|---|---|
| Самолёт вертикального взлёта и посадки | 2016 |
|
RU2641952C1 |
| СПОСОБ МОНИТОРИНГА СОСТОЯНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ ПРИ ДВИЖЕНИИ ПОЕЗДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2829561C2 |
| Летательный аппарат | 2021 |
|
RU2770513C2 |
| Летательный аппарат вертикального взлёта и посадки с изменяемым направлением тяги движителей | 2019 |
|
RU2790454C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПРИ ДВИЖЕНИИ ПОЕЗДА МЕТРОПОЛИТЕНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ С ПРИМЕНЕНИЕМ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2022 |
|
RU2829794C2 |
| ПРЕОБРАЗУЮЩЕЕСЯ ТРЁХСРЕДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ПЯТНАДЦАТИМЕСТНОЕ | 2024 |
|
RU2827271C1 |
| Беспилотный винтокрыл | 2023 |
|
RU2831846C1 |
| Конвертоплан | 2019 |
|
RU2723516C1 |
| МУЛЬТИКОПТЕР С ДВУХЪЯРУСНЫМ РАСПОЛОЖЕНИЕМ ВИНТОМОТОРНЫХ ГРУПП | 2021 |
|
RU2766284C1 |
| Винтокрылый летательный аппарат | 2019 |
|
RU2720746C1 |


Изобретение относится к области авиации, в частности к конструкциям беспилотных летательных аппаратов. Беспилотный летательный аппарат выполнен по аэродинамической схеме «тандем» и содержит фюзеляж (4) с крыльями, на которых расположены несущие винты (1), источник тяги по продольной оси (5). Переднее (2) и заднее (3) крылья размещены на фюзеляже (4) со смещением заднего крыла (3) по высоте вверх и назад относительно переднего крыла (2). Несущие винты (1) расположены под плоскостью крыльев. Соотношение ометаемой площади несущих винтов к площади крыла составляет от 1,9 до 2,2. Угол плоскости несущих винтов (8) составляет от -7 до -15 градусов относительно плоскости строительной горизонтали (6) летательного аппарата. Угол плоскости несущих винтов (8) в полёте не меняется. Обеспечивается увеличение вертикальной тяги на взлёте и грузоподъёмности. 1 з.п. ф-лы, 4 ил.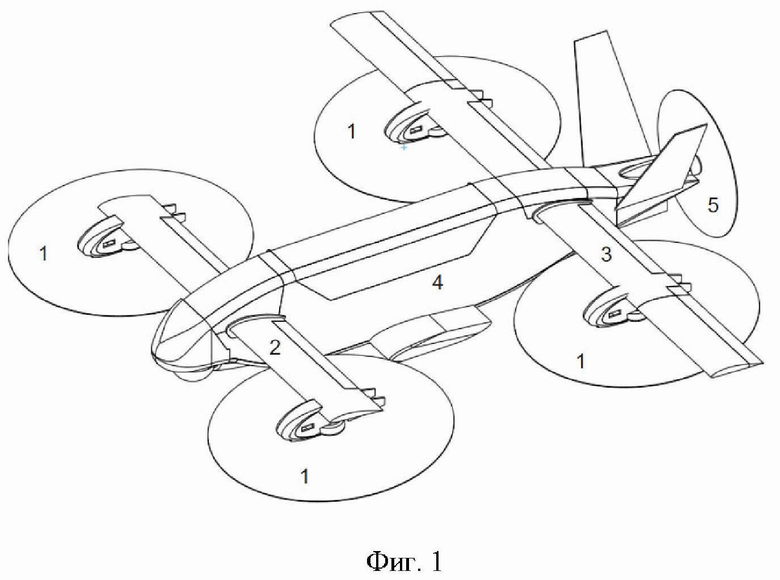
1. Беспилотный летательный аппарат, выполненный по аэродинамической схеме «тандем» и содержащий фюзеляж с крыльями, на которых расположены несущие винты, источник тяги в продольной оси, переднее и заднее крылья размещены на фюзеляже со смещением заднего крыла по высоте вверх и назад относительно переднего крыла, отличающийся тем, что несущие винты расположены под плоскостью крыльев, соотношение площади ометаемой поверхности несущих винтов к площади крыла составляет от 1,9 до 2,2, угол плоскости несущих винтов составляет от -7 до -15 градусов относительно плоскости строительной горизонтали летательного аппарата.
2. Беспилотный летательный аппарат по п.1, отличающийся тем, что угол плоскости несущих винтов в полёте не меняется.
| ВЫПОЛНЕННЫЙ С ВОЗМОЖНОСТЬЮ ВЕРТИКАЛЬНОГО ВЗЛЕТА ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2014 |
|
RU2670356C2 |
| Винтокрылый беспилотный летательный аппарат тандемной схемы | 2021 |
|
RU2771195C1 |
| EP 3925876 B1, 04.10.2023 | |||
| CN 105292461 B, 05.12.2017 | |||
| Беспилотный летательный аппарат вертикального взлета и посадки | 2017 |
|
RU2716391C2 |
| Винтокрылый летательный аппарат | 2019 |
|
RU2720746C1 |

