Предлагаемое изобретение относится к авиационной технике и может быть применено в летательных аппаратах вертикального взлёта и посадки.
Известен конвертоплан – летательный аппарат с поворотными двигателями, которые на взлёте и при посадке работают как подъёмные, а в горизонтальном полёте – как тянущие; при этом подъёмная сила обеспечивается крылом самолётного типа. Недостатком поворотных двигателей при неподвижном крыле, в том, что при вертикальном взлёте крылья затеняют воздушный поток. Существует вариант конвертоплана с поворотным крылом, где крыло поворачивается совместно с жестко закреплёнными двигателями. Недостатком поворотного крыла является большая сложность, достоинством же то, что при вертикальном взлёте крылья не затеняют воздушный поток от винтов увеличивая тем самым эффективность работы винтов. Недостатком конвертопланов является сложность конструкции и как следствие высокая стоимость. (ru. Wikipedia. Org. Конвертоплан. Аналог)
Наиболее близким, к предлагаемому изобретению, является мультикоптер – многороторный летательный аппарат, построенный по вертолётной схеме, с тремя и более несущими винтами. По принципу управления мультикоптеры бывают автономные и дистанционно – управляемые (беспилотные). Мультикоптеры имеют три и более винтов постоянного шага (автомата перекоса, в отличие от одно- двухвинтовых аппаратов, нет). Каждый винт приводится в движение собственным двигателем. Половина винтов вращается по часовой стрелке, половина – против, поэтому рулевой винт мультикоптеру не нужен. Маневрируют мультикоптеры путём изменения скорости вращения винтов. Например: *ускорить все винты – подъём. *ускорить винты с одной стороны и замедлить с другой – движение в сторону. *ускорить винты вращающиеся по часовой стрелке, и замедлить вращение против - поворот в плоскости. Мультикоптеры снабжены микропроцессорной системой которая переводит команды управления в команды двигателям. Чтобы обеспечить стабильное зависание, мультикоптеры в обязательном порядке снабжают тремя гироскопами, фиксирующими крен аппарата. Недостатком мультикоптеров является, как и всех летательных аппаратов с несущим винтом, более высокое энергопотребление в сравнении с аппаратами снабжённым крылом. (ru. Wikipedia. Orq. Мультикоптер. Прототип)
Задач заявленного изобретения – создание летательных аппаратов вертикального взлёта и посадки низкой стоимости при улучшенных функциональных свойствах.
Технический результат достигается тем, что все установленные тяговые движители летательного аппарата используются в режиме подъёма спуска и маневрирования на минимальных скоростях, то есть работа движителей происходит в режиме многороторного вертолёта – мультикоптера. В режим горизонтального полёта, при наличии крыла, переводится часть или все движители, а при отсутствии крыла переводится только часть движителей в режим горизонтальной тяги. Перевод в режим горизонтальной тяги производится без дополнительных исполнительных механизмов, только силой тяги установленных на аппарате движителей. Для поворота движителей в режим горизонтальной тяги создаётся равновесная система между парой жёстко соединённых прямолинейным элементом, расположенным вдоль продольной оси летательного аппарата, движителей. На движителях создают тягу равную по величине и перпендикулярную к земле при этом, при достаточной тяге, происходит подъём летательного аппарата. Следующим этапом нарушается равновесие тяги соединённых прямолинейным элементом движителей, то есть на задним движителе увеличивается тяга, а на переднем уменьшается и система «пара движителей» получает вращение, при установлении тяги горизонтального направления на движителях, тяги сравниваются по величине и аппарат получает результирующий горизонтальный вектор тяги от пары движителей. Вертикальный спуск летательного аппарата производится в обратном порядке. Равновесие на движителях при данном способе можно установить при любом угле поворота системы, чем обеспечивается направление тяги в плоскости вдоль продольной оси летательного аппарата. Для более стабильного поворота пары движителей, прямолинейный элемент закреплён на поворотной оси жестко связанной с корпусом или крылом летательного аппарата. Прямолинейный элемент может быть жёстко связан и проходить через крыло, а крыло выполнено на поворотной оси жестко соединённой с корпусом или с подвесом, на котором крепится корпус, что позволяет поворачивать крыло с помощью изменения тяги движителей. Поворот крыла плоскостью перпендикулярной к земле при подъёме значительно уменьшает аэродинамическое сопротивление и позволяет поднять летательный аппарат при меньшей тяге. Для фиксации движителей в вертикальном или горизонтальном положении в узле поворота на оси установлены устройства фиксации или механизм торможения, позволяющие получить жёсткое соединение движителей с аппаратом в различных режимах полёта. Движители, создающие тягу, конструктивно могут быть выполнены - винтовыми, турбовинтовыми реактивными и так далее, но при исполнении движителей с винтами требуется компенсировать реакцию вращающего винта, то есть вращение пары винтов должны иметь разное направление. Применение данного способа поворота тяги движителей в конструкции летательных аппаратов вертикального взлёта и посадки зависит от назначения аппарата и придания ему необходимых функциональных возможностей.
Рассмотрим варианты исполнения летательных аппаратов и их возможности:
1А) Мультикоптер состоит из двух жестко связанных, по продольной оси, на корпусе впереди и сзади движителями вертикальной тяги и поперечно корпусу, на осях с двух сторон с механизмом фиксации положения установлены две пары движителей соединёнными прямолинейными элементами. Данная конструкция позволяет, при исполнении с воздушными винтами, подъём, посадку и маневрирование при минимальных скоростях осуществлять как мультикоптер, а горизонтальный полет выполнять с повернутыми движителями с горизонтальной тягой и подъёмной силой создаваемыми движителями вертикальной тяги, закреплёнными вдоль продольной оси аппарата. В горизонтальном полёте движители вертикальной тяги возможно использовать в режиме авторотации. Маневрирование аппарата в горизонтальном полёте при комплектации вентиляторными движителями, с помощью регулирования оборотов на движителях. Применение летательного аппарата, вертикального взлёта и посадки, по данной схеме в игрушках, беспилотниках и летающих мотоциклах.
1Б) На летательном аппарате установлены два движителя вертикальной тяги поперечно жёстко соединённые с корпусом, а в задней части, по продольной оси аппарата, пара движителей соединёнными прямолинейным элементом на оси вращения, закреплённой поперечно на хвостовой балке аппарата. В узле поворота на оси вращения установлен механизм фиксации положения пары движителей. В режиме подъёма зависания и маневрирования все движители работают с вертикальной тягой, а в горизонтальном полёте, пара поворотных движителей создают горизонтальную тягу и подъёмную силу обеспечивают два расположенных поперечно движителя вертикальной тяги способные работать и в режиме авторотации. В отличие от вертолёта все движители выполнены с винтами постоянного шага, а маневрирование производится изменением оборотов двигателей. Аппараты по данной схеме аналогичны вертолёту, но более простые по конструкции.
2) Летательный аппарат снабжённый крылом (крыльями) с жёстко закреплёнными как миниум двумя прямолинейными элементами, проходящими перпендикулярно через плоскость крыла и соединяющими жёстко пару движителей с тягой параллельно плоскости крыла и направленной поперёк крыла. В режиме подъёма плоскость крыла и тяга движителей перпендикулярна к земле, крыло при таком расположении имеет минимальное аэродинамическое сопротивление и не затеняет воздушный поток от движителей. Аппарат в этом режиме на малых скоростях работает как мультикоптер. В горизонтальный режим аппарат переводится при нарушении равновесия тяги движителей. В горизонтальном полёте используется подъёмная сила крыла и горизонтальная тяга движителей. Данный вариант возможен и в исполнении биплана. Летательный аппарат по этой схеме является мультикоптером в режиме подъёма посадки и маневрирования, а в горизонтальном полёте летательным аппаратом - «летающее крыло». Для стабилизации аппарата в воздухе, как и мультикоптеру, необходима микропроцессорная система, включающая в обязательном порядке гироскопы. В горизонтальном полёте маневрирование – аналогично мультикоптеру с учётом подъёмной силы крыла. Преимущество в сравнении с мультикоптером за счёт применения крыла - экономичность. повышенная скорость с сохранением функциональных возможностей мультикоптера. Область применения - игрушки и беспилотники.
3) Летательный аппарат с неподвижным крылом жёстко соединённым с корпусом аппарата и движителями соединёнными прямолинейными элементами вращающимся на поворотных осях жестко закреплённых на концах крыльев или на корпусе, с устройством в узле поворота механизмом фиксации положения направления тяги. Данный вариант, при подъёме спуске полёту и маневрировании, аналогичен конвертоплану с поворотными движителями, имеет больше движителей, но с более простым механизмом разворота тяги движителей.
4) Летательный аппарат с поворотными крыльями, насаженными на поворотную ось жёстко соединённой с корпусом, с устройством в узле поворота механизмом фиксации положения крыла и направления тяги и движителями, жёстко закреплёнными на прямолинейных элементах, проходящих через крыло перпендикулярно плоскости крыла с направлением тяги движителей параллельно плоскости и поперёк крыла. В данном варианте движители поворачиваются совместно с крылом, насаженное на поворотную ось и фиксируются в заданном положении путём неравномерного изменения тяги на паре движителей жёстко связанных прямолинейным элементом. Данному варианту присущи все достоинства конвертоплана с поворотным крылом - при вертикальном взлёте крылья не затеняют поток от движителей тем самым увеличивая эффективность работы движителей и выгодно отличается, от конвертоплана с поворотным крылом, наличием простого способа поворота крыла. Предложенный летательный аппарат по своим функциональным возможностям аналогичен конвертоплану с поворотным крылом.
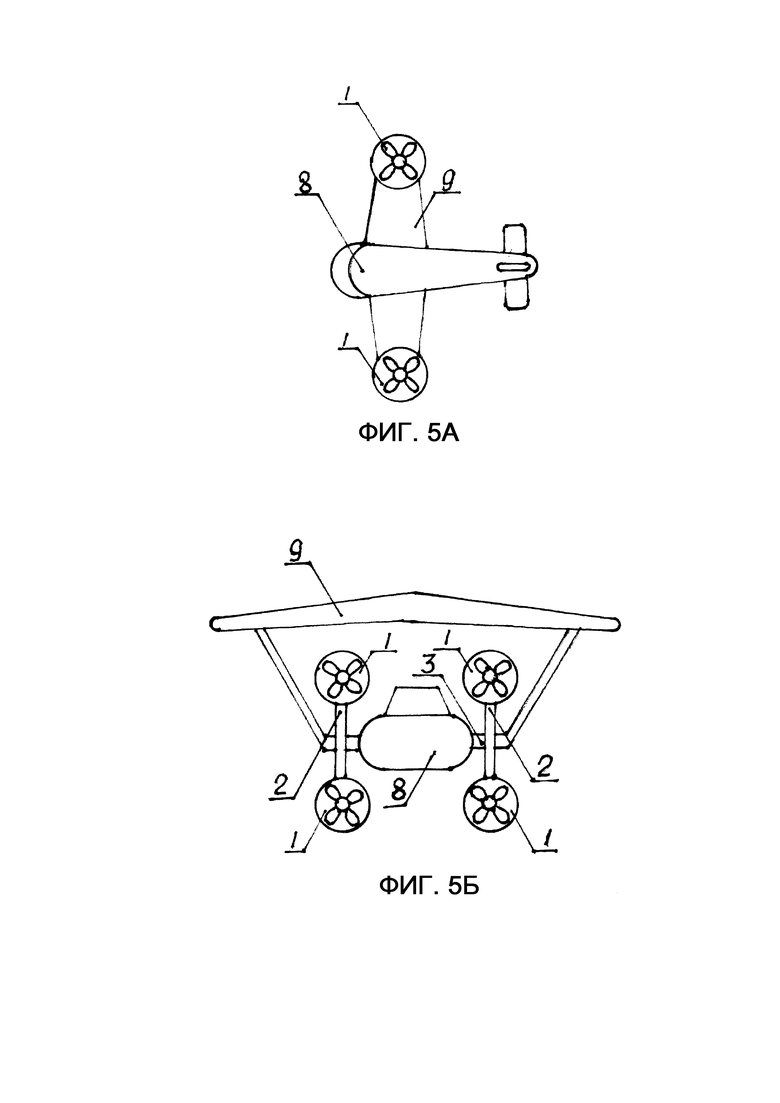
5А) Летательный аппарат снабжённый крылом (крыльями) с жёстко закреплёнными как миниум двумя прямолинейными элементами, проходящими перпендикулярно через плоскость крыла и соединяющих жёстко пару движителей, с тягой параллельно плоскости крыла и корпусом соединённым подвесом с концами крыла на поворотных осях с устройством в узле поворота механизмом фиксации положения крыла и тяги движителей. В данном варианте движители поворачиваются совместно с выполненным цельным крылом и подняты над корпусом, что применимо для гидропланов и экранолётов с вертикальным взлётом и посадкой.
5Б) Летательный аппарат по схеме 5А, дополненный по продольной оси аппарата, спереди и сзади движителями, жёстко закреплёнными на корпусе, с вертикальной тягой. В этом варианте крыло может быть меньшей площади. При подъёме используются все тяговые движители и крыло расположено плоскостью перпендикулярно к земле. В горизонтальном полёте крыло параллельно к земле при движении создаёт подъёмную силу, движители, связанные с крылом, создают горизонтальную тягу, а движители закрепленные на корпусе вертикальную тягу. При движении в горизонтальном полёте возможна работа движителей вертикальной тяги в режиме авторотации дополнительно с крылом создающая подъёмную силу. Данная схема наиболее приемлима для летающего мотоцикла.
6) Летательный аппарат вертикального взлёта и посадки (аэромобиль) – выполнен на базе автомобиля и конструктивно выполнен по следующей схеме: на крыше автомобиля, на перпендикулярной поворотной оси, закреплено по центру крыло, снабжённое с двух сторон по краям двумя парами движителей, соединёнными прямолинейными элементами посаженными на поворотные оси, жёстко соединёнными с крылом с устройствами в узле поворота механизмами фиксации положения тяги движителей. Механизм фиксации так же установлен в узле поворота крыла. Данный аппарат работает следующим образом ; при движении в режиме автомобиля - крыло расположено вдоль оси аэроавтомобиля и удерживается фиксирующим устройством, прямолинейные элементы с движителями расположены параллельно земли. Приведение крыла в предстартовое положение производится движителями, в данный момент расположенных горизонтально земле, путём изменения оборотов винтов движителей, то есть ускоряются винты, вращающиеся по часовой стрелке, и замедляются вращающиеся против (как у мультикоптера) – происходит поворот в плоскости до положения «крыло поперёк» и его фиксации. Следующим этапом включаются движители на подъём и затем переводятся в режим горизонтального полёта. Режим вертикальной посадки и перевод в режим автомобиля производится в обратном порядке. В данном варианте, при современном уровне техники, аэромобиль должен быть укомплектован электрическим источником энергии с питанием от аккумуляторов или комбинированной системы «двигатель- электрогенератор».
7) Летательный аппарат выполнен последующей схеме; на корпусе в верху установлена поворотная платформа, по периметру с двумя перпендикулярными стойками через которые проходит поворотная ось жёстко связанная с двумя крыльями, у которых на концах, на поворотных осях установлены прямолинейные элементы с парой движителей. Ось, проходящая через стойки поворотной платформы, закрыта фрагментом, параллельно расположенного крыла. Все поворотные оси снабжены устройством с механизмом фиксации положения. Приведение аппарата в предстартовое положение происходит следующим образом; крыло, находящиеся в стояночном положении, плоскостью параллельно земле вдоль оси аппарата, с движителями, закреплёнными на прямолинейных элементах параллельно земле, включаются и переводятся на горизонтальную тягу. Затем на одной из пары движителей увеличивается тяга, на другой уменьшается, крыло поворачивается с поворотной платформой и устанавливается в поперечном положении, далее зафиксированное жёстко с прямолинейными элементами, с помощью изменения тяги на парах движителей крыло переводится в положение плоскостью перпендикулярное к земле и движители поворачиваются в положение тяга перпендикулярна земле. Аппарат готов к взлёту. Посадка и приведение аппарата в стояночное положение производится в обратном порядке. Полет и маневрирование аналогично – конвертоплану с поворотным крылом. Данный аппарат в стояночном положении занимает миниум места, взлёт и посадка происходит вертикально, поэтому его применение - на авианосцах, а при установке на автомобиле получаем аэромобиль. Все предложенные варианты летательных аппаратов вертикального взлёта и посадки просты по конструкции, не имеют лишних движителей на изменения конфигурации элементов аппарата, позволяют использовать летательные аппараты с самолётными скоростями, вертолётной маневренностью и не требуется для базирования большие аэродромы.
Описание фигур:
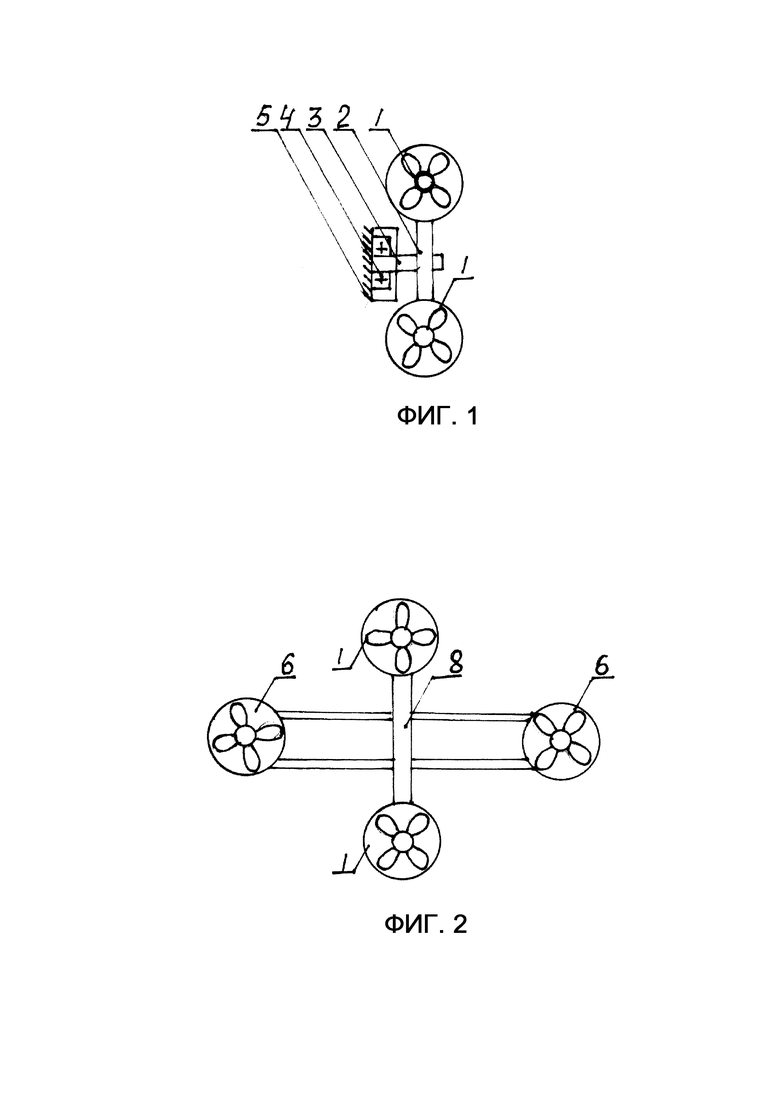
Фиг.1 пара движителей вид сверху.
Фиг.2 мультикоптер с поперечным расположением поворотных движителей и двух жёстко закреплённых продольно движителей вертикальной тяги. Вид сверху, позиция «подъём».
Фиг.2А мультикоптер с поперечным расположением поворотных движителей двух жёстко закреплённых продольно движителей вертикальной тяги. Вид сбоку, позиция «горизонтальный полёт».
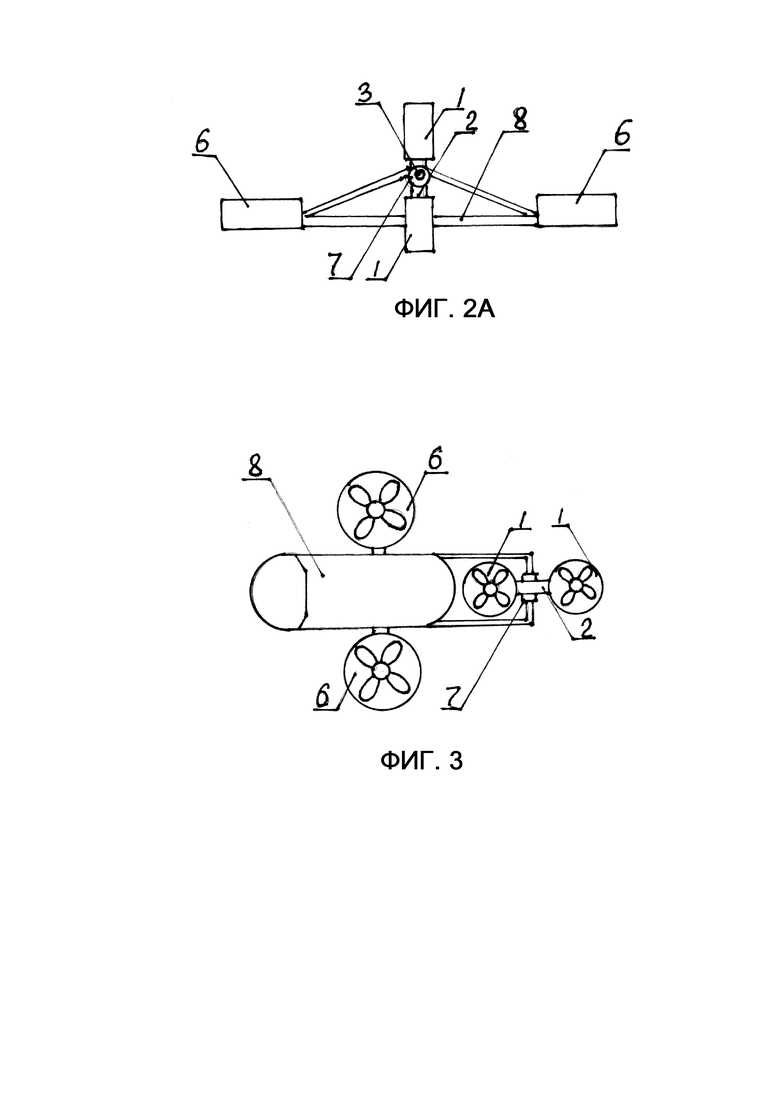
Фиг.3 летательный аппарат с двумя жёстко закреплёнными поперечно движителями вертикальной тяги и пары поворотных движителей закреплённых на хвостовой балке. Вид сверху, позиция «подъём».
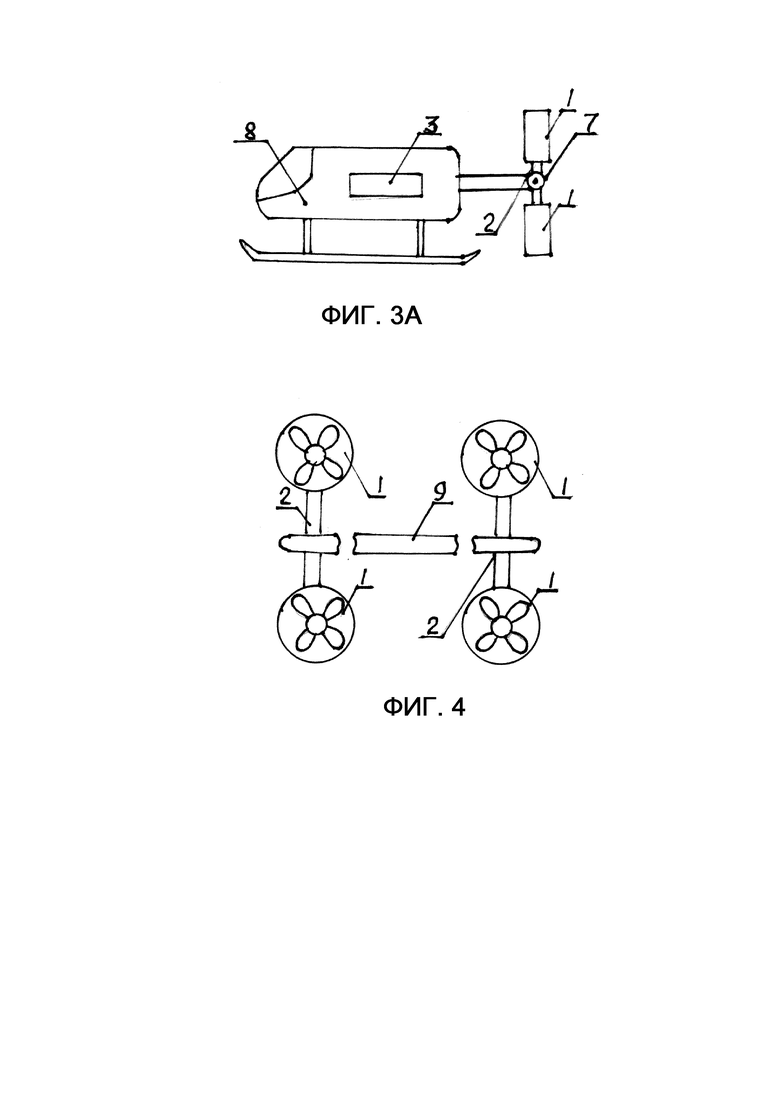
Фиг.3А летательный аппарат с двумя жёстко закреплёнными поперечно движителями вертикальной тяги и пары поворотных движителей закреплённых на хвостовой балке. Вид сбоку, позиция «горизонтальный полёт».
Фиг.4 летательный аппарат с прямолинейными элементами, жёстко закреплёнными, проходящими через крыло с жестко соединёнными прямолинейным элементом пары движителей. Вид сверху, позиция «подъём».
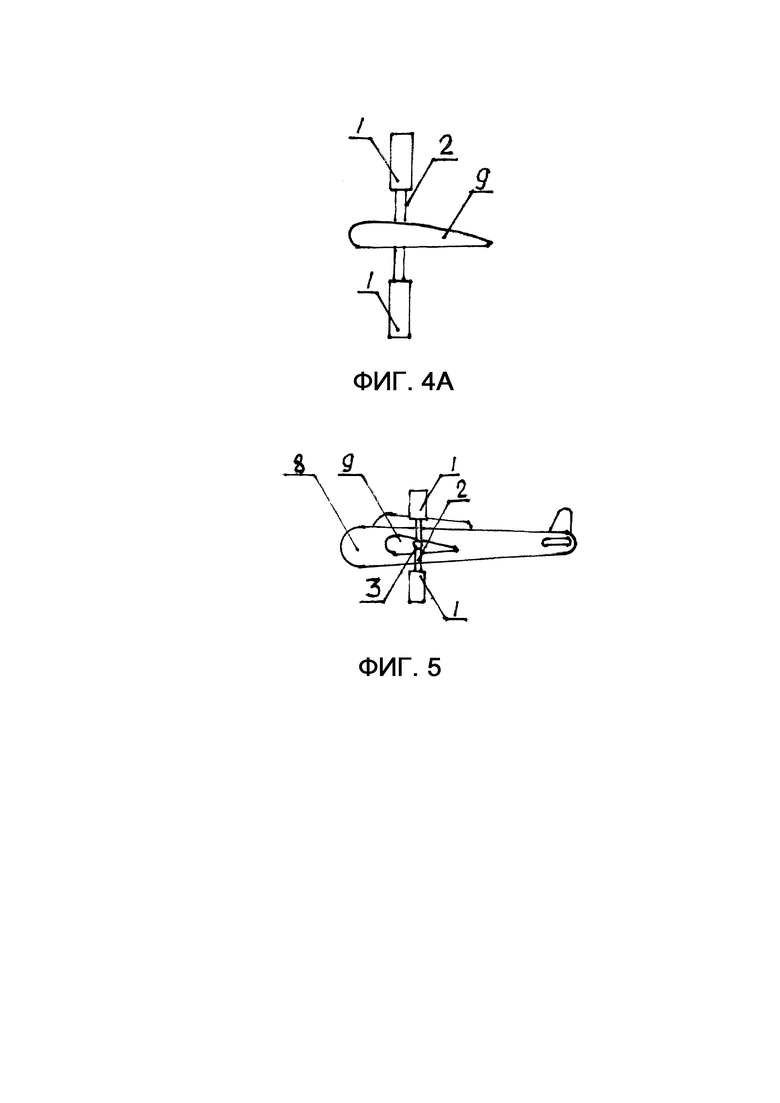
Фиг.4А летательный аппарат с прямолинейными элементами, жёстко закреплёнными, проходящими через крыло с жёстко соединёнными прямолинейным элементом пары движителей. Вид сбоку, позиция «горизонтальный полёт».
Фиг.5 летательный аппарат с поворотными движителями жёстко соединёнными прямолинейными элементами и закреплённые на осях на концах крыльев. Вид сбоку, позиция «горизонтальный полёт».
Фиг.5А летательный аппарат с поворотными движителями жестко соединёнными прямолинейными элементами и закреплённые на осях на концах крыльев. Вид сверху, позиция «подъём».
Фиг.5Б летательный аппарат с поворотными движителями жёстко соединёнными прямолинейными элементами и закреплёнными на осях на корпусе. Вид спереди, позиция «горизонтальный полёт».
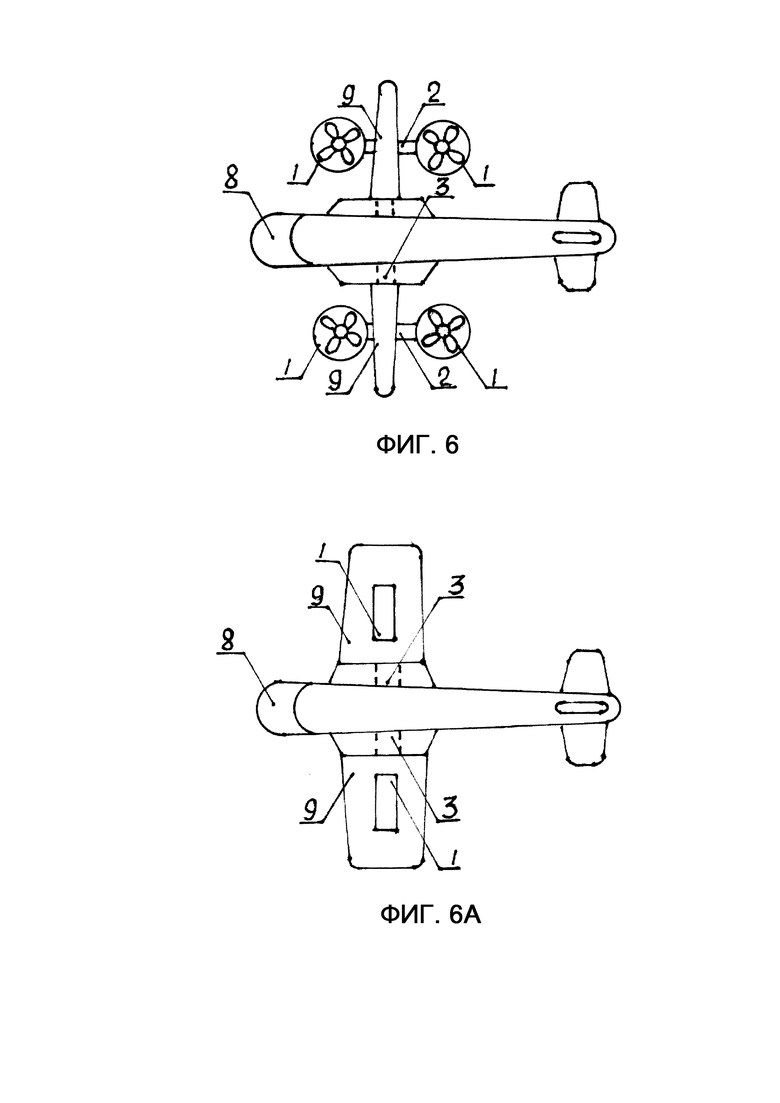
Фиг.6 летательный аппарат с поворотным крылом с жестко закреплёнными на крыле прямолинейными элементами с тяговыми движителями. Вид сверху, позиция «подъём».
12) Фиг.6А . летательный аппарат с поворотным крылом с жёстко закреплёнными на крыле прямолинейными элементами с тяговыми движителями. Вид сверху, позиция «горизонтальный полёт».
Фиг.7 летательный аппарат с поворотным крылом с жёстко закреплёнными на крыле прямолинейными элементами с тяговыми движителями и подвеской на концах крыла на осях корпуса. Вид сверху, позиция «подъём».
Фиг.7А летательный аппарат с поворотным крылом с жёстко закреплёнными на крыле прямолинейными элементами с тяговыми движителями и подвеской на концах крыла на осях корпуса. Вид спереди, позиция «горизонтальный полёт».
Фиг.8 летательный аппарат с поворотным крылом с жёстко закреплёнными на крыле прямолинейными элементами с тяговыми движителями, подвеской на концах крыла на осях корпуса и жёстко закреплённых, по продольной оси корпуса, спереди и сзади движителями вертикальной тяги. Вид сверху, позиция «подъём».
Фиг.8А летательный аппарат с поворотным крылом с жёстко закреплёнными на крыле прямолинейными элементами с тяговыми движителями, подвеской на концах крыла на осях корпуса и жёстко закреплённых, по продольной оси корпуса, спереди и сзади движителями вертикальной тяги. Вид спереди, позиция «горизонтальный полёт».
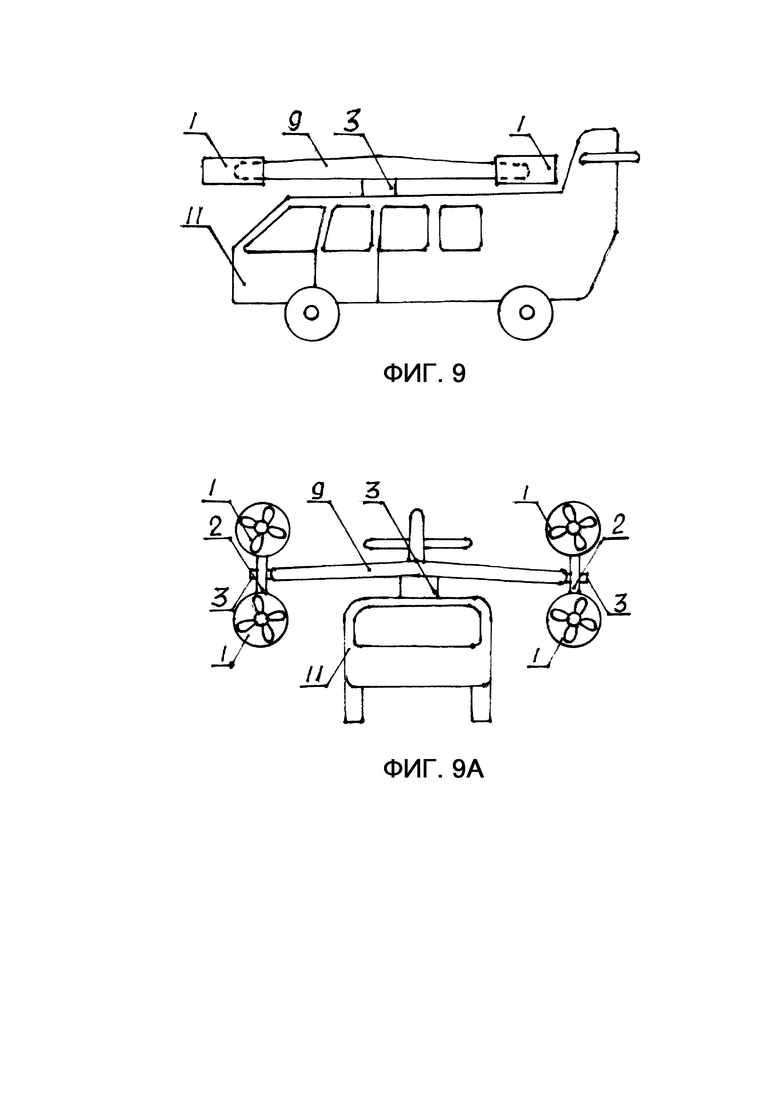
Фиг.9 летательный аппарат (аэроавтомобиль) с крылом на поворотной оси закреплённой на крыше автомобиля и движителями скреплёнными прямолинейными элементами закреплёнными на осях по концам крыла. Вид сбоку, позиция «режим автомобиля».
Фиг.9А летательный аппарат (аэроавтомобиль) с крылом на поворотной оси, закреплённой на крыше автомобиля и движителями скреплёнными прямолинейными элементами закреплёнными на осях по концам крыла. Вид спереди, позиция «горизонтальный полёт».
Фиг.9Б летательный аппарат (аэроавтомобиль) с крылом на поворотной оси, закреплённой на крыше автомобиля и движителями, скреплёнными прямолинейными элементами, закреплёнными на осях по концам крыла. Вид сверху, позиция «подъём».
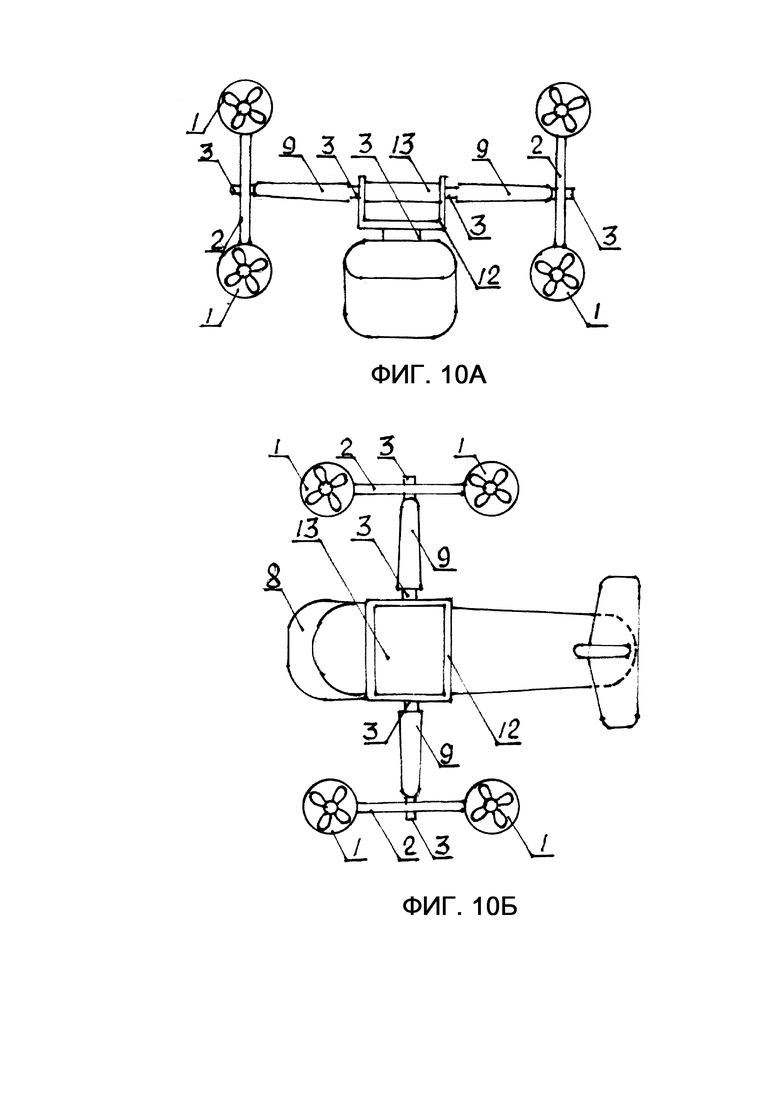
Фиг.10 летательный аппарат с поворотным крылом, с осью, проходящей через стойки поворотной платформы, установленной вверху на корпусе аппарата и движителями, скреплёнными прямолинейными элементами, закреплёнными на осях по концам крыла. Вид сбоку, позиция «стоянка».
Фиг.10А летательный аппарат с поворотным крылом, с осью, проходящей через стойки поворотной платформы, установленной вверху на корпусе аппарата и движителями, скреплёнными прямолинейными элементами, закреплёнными на осях по концам крыла. Вид спереди, позиция «горизонтальный полёт».
Фиг.10Б летательный аппарат с поворотным крылом, с осью, проходящей через стойки поворотной платформы, установленной вверху на корпусе аппарата и движителями, скреплёнными прямолинейными элементами, закреплёнными на осях по концам крыла. Вид сверху, позиция «подъём».
Фиг.11 узел поворота пары движителей с механизмом фиксации положения тяги. Вид сбоку (вид сверху).
Фиг.11А узел поворота пары движителей с механизмом фиксации положения тяги «горизонтально – вертикально». Вид справа.
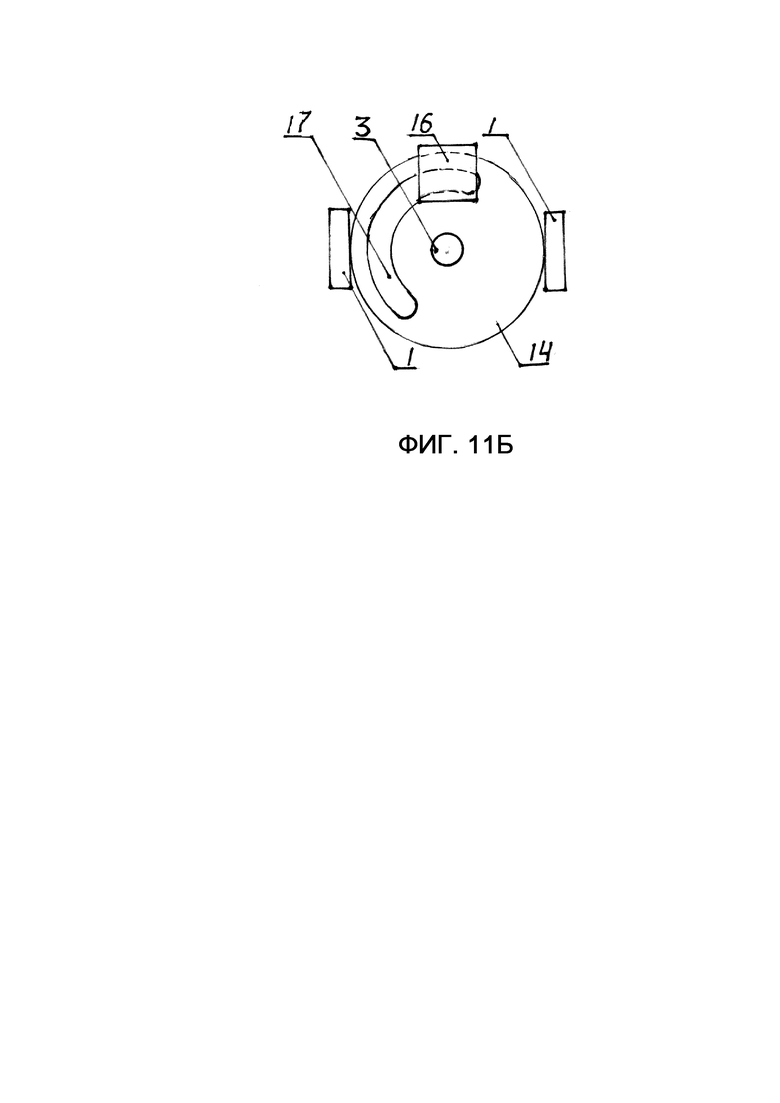
Фиг.11Б узел поворота пары движителей с механизмом фиксации положения тяги «от горизонтального до вертикального». Вид справа.
Летательный аппарат вертикального взлёта и посадки в различных вариантах состоит из движителей 1, скреплёнными жёстко прямолинейными элементами 2, закреплёнными на поворотной оси 3, посаженной на подшипник 4 установленным на элементе5 летательного аппарата.
Выполнение летательных аппаратов - варианты:
1А) Мультикоптер (фиг.2, фиг.2А) состоит из двух жёстко связанных, по продольной оси, на корпусе впереди и сзади движителями вертикальной тяги 6 и поперечно корпусу 8, на осях 3 с механизмом фиксации положения 7 установлены две пары движителей 1 соединёнными прямолинейными элементами 2.
1Б) На летательном аппарате (фиг.3, фиг.3А) установлены два движителя вертикальной тяги 6, поперечно жёстко соединённые с корпусом 8, а в задней части, по продольной оси аппарата, пара движителей 1 соединёнными прямолинейным элементом 2 на оси вращения 3, закреплённой поперечно на хвостовой балке аппарата. В узле поворота, на оси вращения 3, установлен механизм фиксации положения 7 пары движителей 1.
2) Летательный аппарат (фиг.4, фиг.4А) снабжённый крылом 9 с жёстко закреплёнными, как минимум двумя, прямолинейными элементами 2 проходящими перпендикулярно через плоскость крыла 9 и соединяющих жестко пары движителей 1 с тягой параллельно плоскости крыла 9 и направленной поперёк крыла 9.
3) Летательный аппарат (фиг.5, фиг.5А, фиг.5Б) с неподвижным крылом 9, жёстко соединённым с корпусом 8 аппарата и движителями 1, соединёнными прямолинейными элементами 2 вращающимся на поворотных осях 3 жестко закреплённых на концах крыльев 9 или на корпусе 8, с устройством в узле поворота механизмом фиксации 7 направления тяги движителей 1.
4) Летательный аппарат (фиг.6, фиг.6А) с поворотными крыльями 9, посаженными на поворотную ось 3, жёстко соединённой с корпусом 8, с устройством в узле поворота механизмом фиксации 7 положения крыла 9 и направления тяги движителей 1, жёстко закреплёнными на прямолинейных элементах 2,проходящих через крыло 9 перпендикулярно плоскости крыла с направлением тяги движителей 1 параллельно плоскости и поперёк крыла 9.
5А) Летательный аппарат (фиг.7, фиг.7А), снабжённый крылом 9 с жёстко закреплёнными как минимум двумя прямолинейными элементами 2, проходящими перпендикулярно через плоскость крыла 9 и соединяющих жёстко пару движителей 1, с тягой параллельно плоскости крыла 9 и корпусом 8 соединённым подвесом 10 с концами крыла 9 на поворотных осях 3 с устройством в узле поворота механизмом фиксации 7 положения крыла 9 и тяги движителей 1.
5Б) Летательный аппарат (фиг.8, фиг.8А) по схеме 5А, дополненный по продольной оси аппарата, спереди и сзади, движителями 6 вертикальной тяги, жёстко закреплёнными на корпусе.
6) Летательный аппарат (фиг.9, фиг.9А, фиг.9Б) вертикального взлёта и посадки (аэроавтомобиль) - выполнен на базе автомобиля 11 и состоит из автомобиля 11, на которого на перпендикулярной поворотной оси 3, закреплено по центру крыло 9, снабжённое с двух сторон, по краям двумя парами движителей 1, соединёнными прямолинейными элементами 2 посаженными на поворотные оси 3 , жёстко соединённые с крылом 9 с устройством в узле поворота механизмами фиксации положения тяги движителей 1. Механизм фиксации 7 так же установлен в узле поворота крыла 9.
7) Летательный аппарат (фиг.10, фиг.10А, фиг.10Б) выполнен по следующей схеме; на корпусе 8, в верху, установлена на оси 3 поворотная платформа 12 по периметру с двумя перпендикулярными стойками, через которые проходит поворотная ось 3, жёстко связанная с двумя крыльями 9, у которых на концах, на поворотных осях 3 установлены прямолинейные элементы 2 с парой движителей 1. Ось 3 проходящая через стойки поворотной платформы 12 закрыты фрагментом 13, параллельно расположенного крыла 9. Все поворотные оси снабжены устройством с механизмом фиксации положения. Летательные аппараты вертикального взлёта и посадки, снабжённые в узле поворотной оси механизмом фиксации положения, который может конструктивно быть выполнен в различных вариантах - электромеханическим механическим и так далее, в современном известном арсенале конструкторских решений их великое множество. В данном случае предлагается один из вариантов (фиг.11, фиг.11А, фиг.11Б) исполнения: пара движителей 1, жёстко связанных прямолинейным элементом 2, закреплённым на оси 3, посаженный на подшипник 4. Ось 3 жёстко связана с диском 14, на котором установлены магниты 15, точечно или сегментом и жестко установленным фиксирующим электромагнитом 16. Аналогично исполнение механизма фиксации положения на оси поворота крыла от вертикального до горизонтального и поворота в горизонтальной плоскости.
Летательные аппараты вертикального взлёта и посадки работают следующим образом:
1А) Мультикоптер (фиг.2, фиг.2А) с поперечным расположением поворотных движителей 1 и двух жёстко закреплённых продольно движителей 6 вертикальной тяги подъём, маневрирование и посадку осуществляют изменением величины тяги на движителях, при работе всех движителей 1 и движителей 6 с тягой, направленной перпендикулярно к земле. Этот режим аналогичен режиму - мультикоптера. Перевод в режим горизонтального полёта происходит при переводе поворотных движителей 1 из режима вертикальной тяги в режим горизонтальной тяги, который происходит при увеличении тяги на заднем движителе 1 и уменьшении тяги на переднем движителе 1, при этом фиксирующий механизм 7 освобождает поворотную ось 3, закреплённую на прямолинейном элементе 2, и пара движителей 1 разворачиваются на оси 3 по часовой стрелке и фиксируются механизмом фиксации 7 параллельно к земле. В горизонтальном полёте движители 6 создают подъёмную силу, а движители 1 горизонтальную тягу, причём движители 6 возможно использовать в режиме авторотации, если они выполнены с воздушным винтом. Управление аппаратом в полёте осуществляется – изменением тяги на движителях. Разворот поворотных движителей 1 для посадки производится в обратном порядке.
1Б) Летательный аппарат (фиг.3, фиг.3А) с двумя жёстко закреплёнными поперечно движителями 6 вертикальной тяги и пары поворотных движителей 1, закреплённых на хвостовой балке на поворотной оси 3 с механизмом фиксации положения 7 пары движителей 1. Подъём происходит при включении на максимальную тягу движителей 6 и поворотных движителей 1, работающих с вертикальной тягой. В режиме горизонтального полёта поворотные движители 1 разворачиваются параллельно к земле аналогично как в пункте 1А, и создают горизонтальную тягу, а подъёмную силу обеспечивают два движителя 6 вертикальной тяги способные работать и в режиме авторотации. В отличие от вертолёта, все движители выполнены с винтами постоянного шага, а маневрирование производится изменением оборотов двигателей. Вертикальная посадка аппарата производится в обратном порядке.
2) Летательный аппарат (фиг.4, фиг.4А) с прямолинейными элеменами 3, жёстко закреплёнными, проходящими через крыло 9 с жёстко соединёнными прямолинейным элементом 3 пары движителей 1. В режиме подъёма, посадки, зависания и маневрирования – крыло 9 расположено перпендикулярно к земле и соответственно тяга движителей 1 так же перпендикулярна к земле. Подъём происходит при одинаковом увеличении тяги движителей 1, при необходимости зависании или маневрировании аппарата в этом положении, изменяется тяга на движителях аналогично как у мультикоптера. Поворот аппарата на горизонтальный полёт производится одинаковым увеличением тяги на задних движителях 1 и уменьшением на передних, что приводит повороту крыла 9 вместе с движителями 1. Горизонтальный полёт происходит при равных тягах на движителях. Маневрирование, в горизонтальном полете осуществляется с помощью неравномерного изменения тяги на движителях. Вертикальная посадка аппарата производится в обратном порядке.
3) Летательный аппарат (фиг.5, фиг.5А, фиг.5Б) с поворотными движителями 1 жёстко соединёнными прямолинейными элементами 2 и закреплёнными на осях 3 на концах крыльев 9 или на осях 3 на корпусе 8. Подъём аппарата производится при расположении движителей 1 тягой перпендикулярно к земле и максимальном увеличением тяги при зафиксированном положении, затем фиксаторы положения 7 отключаются, на задних двигателях 1 тяга увеличивается, а на передних уменьшается, что приводит к повороту движителей 1 в горизонтальное положение и их фиксации фиксаторами положения 7. Аппарат приведен в режим горизонтального полёта с горизонтальной тягой от движителей 1. Дальнейший полёт происходит в режиме самолёта. Вертикальная посадка производится в обратном порядке.
4) Летательный аппарат (фиг.6, фиг.6А) с поворотным крылом 9 с жёстко закреплёнными на крыле 9 прямолинейными элементами 2 с тяговыми движителями 1. Подъём производится включение максимальной тяги на движителях 1, зафиксированных и расположенных совместно с крылом 9, перпендикулярно к земле. При наборе высоты, отключаются фиксаторы 7 положения крыла 9, на задних движителях 1 добавляется тяга, а на передних уменьшается, крыло 9 совместно с движителями 1 переводится в горизонтальное положение. В дальнейшем, аппарат движется в самолётном режиме с движителями 1, создающими горизонтальную тягу. Вертикальная посадка осуществляется в обратном порядке.
5) Летательный аппарат (фиг.7, фиг.7А) с поворотным крылом 9 с жёстко закреплёнными на крыле 9 прямолинейными элементами 2 с тяговыми движителями 1 и подвеской10 на концах крыла 9 на осях 3 корпуса 8. Подъём, посадка и горизонтальный полёт полностью аналогичен летательному аппарату по пункту 4.
6) Летательный аппарат (фиг.8, фиг.8А) с поворотным крылом 9 с жёстко закреплёнными на крыле 9 прямолинейными элементами 2 с тяговыми движителями 1, подвеской 10 на концах крыла 9 на осях 3 корпуса 8 и жёстко закреплённых, по продольной оси корпуса8, спереди и сзади движителями 6 вертикальной тяги. Подъём производится включением максимальной тяги на движителях 6 и зафиксированном крыле 9 с движителями 1, расположенными перпендикулярно к земле. При наборе высоты отключаются фиксаторы 7, тяга на задних движителях 1 увеличивается, а на передних уменьшается, крыло 9 совместно с движителями 1, разворачивается по часовой стрелке, устанавливается и фиксируется в горизонтальном положении. В дальнейшем аппарат движется горизонтальной тягой движителей 1 и поддерживается вертикальной тягой движителей 6 и подъёмной силой крыла 9. Положительный эффект применения движителей 6 в том, что при поворотах крыла 9 они поддерживают аппарат, при наборе скорости могут работать в режиме авторотации, а на малых скоростях способствуют лучшей маневренности. Посадка аппарата производится в обратном порядке.
7) Летательный аппарат (фиг.9, фиг.9А, фиг.9Б) (аэроавтомобиль) с крылом 9 на поворотной оси 3, закреплённой на крыше автомобиля 11, и движителями 1, скреплёнными прямолинейными элементами 2 закреплёнными на осях 3 по концам крыла 9. Данный аппарат возможно использовать как автомобиль так и летательный аппарат вертикального взлёта и посадки. Перевод аппарата в предстартовое положение для полета производится следующим образом – крыло 9 с поворотными движителями 1 (тяга вертикальна), расположенное вдоль продольной оси, снимается с фиксатора, включаются двигатели1 с винтами по разным концам крыла9, имеющие одинаковое направление вращения. Крыло 9 под действием однонаправленных сил реакции винтов поворачивается принимая поперечное положение и фиксируется. В дальнейшем взлёт посадка и горизонтальный полёт производится аналогично летательному аппарату по П.3. Перевод в режим автомобиля производится в обратном порядке. 8) Летательный аппарат (фиг.10, фиг.10А, фиг.10Б) с поворотным крылом 9, с осью 3, проходящей через стойки поворотной платформы 12, установленной вверху на корпусе 8 аппарата и движителями 1 скреплёнными прямолинейными элементами 2 закреплёнными на осях 3 по концам крыла 9. Приведение аппарата в предстартовое положение происходит следующим образом; крыло 9, находящиеся в стояночном положении, плоскостью параллельно к земле вдоль оси аппарата, с движителями 1, закреплёнными на прямолинейных элементах 2 параллельно к земле, снимаются с фиксатора 7 и переводятся на горизонтальную тягу, аналогично предыдущему. Затем на одной из пары движителей 1 увеличивается тяга на другой уменьшается, крыло 9 поворачивается с поворотной платформой 12 и устанавливается в поперечном положении. Далее зафиксированное жёстко с прямолинейными элементами 2, с помощью изменения тяги на парах движителей1 крыло9 переводится в положение плоскостью перпендикулярное к земле и движители1 поворачиваются в положение тяги перпендикулярно к земле. Подъём и горизонтальный полёт аналогично летательному аппарату по пункту П.4. Вертикальную посадку лучше осуществлять с плоскостью крыла 9 параллельно к земле и перпендикулярной тягой, что увеличивает парусность аппарата и требует меньших затрат энергии. Приведение аппарата в стояночное положение производится в обратном порядке. Для фиксации движителей 1 или крыла 9 в положениях – стояночных, подъёма маневрирования и горизонтального полета необходим механизм фиксации положения имеющий, как вариант, следующую конструкцию (фиг.11, фиг.11А, фиг.11Б); оси 3 вращается на подшипнике 4, и вращает жёстко закреплённой на оси 3 прямолинейный элемент 2 с тяговыми движителями 1 или крылом 9 (на чертеже не показано). Вращаются на оси 3, так же жестко закреплённый диск 14 с точечными магнитами 15 или магнитным сегментом 17. Фиксация положения происходит при включении электромагнита 16 жёстко связанного с элементом аппарата. Точечные магниты 15 фиксируют ось 3 в двух крайних положениях, а сектор 16 и в крайних и в промежуточных положениях, что расширяет функциональные возможности аппарата. Технический эффект предлагаемых летательных аппаратов вертикального взлёта и посадки заключается в использовании при подъёме, маневрировании, посадке и горизонтальном полете одних и тех же движителей, установленных на аппарате, путём поворота движителей и соответственно их тяги, без дополнительных исполнительных двигателей только путём изменения тяги на самих движителях, а так же, при жёсткой связи крыла и движителей, поворот крыла совместно с движителями. Данный технический эффект достигается тем, что пара движителей, с однонаправленной тягой, жестко связана между собой прямолинейным элементом и при увеличении тяги на одном из движителей и уменьшении на другом, возникает вращающий момент поворачивающий пару движителей по часовой стрелке или против. Для более стабильного поворота пары движителей прямолинейный элемент посажен на ось вращения, который закреплён на корпусе или крыле аппарата. В случае жёсткой связи прямолинейного элемента движителей с крылом аппарата, при изменении тяги на паре движителей, получаем вращающий момент совместно с крылом, а при посадке крыла на ось вращения – получаем вращение крыла на оси жёстко связанной с корпусом аппарата. Для стабильного положения тяги в различных режимах, аппарат в узлах поворота оси, снабжён механизмом фиксации положения конструктивно выполненным – механическим электромеханическим и так далее. С помощью тяги установленных движителей, возможен поворот крыла посаженного по центру на ось, жестко закреплённой на крыше аппарата, что позволяет выполнить аппарат компактным, с крылом расположенным вдоль продольной оси корпуса при стоянке. При установке на оси, проходящей через стойки поворотной платформы установленной на крыше, крыла с движителями по концам крыла, с помощью маневрирования тягой на движителях осуществляется перевод крыла из положения вдоль корпуса – в предстартовое положение с разворотом крыла перпендикулярно к земле, подъём в воздух и полёт. Простой способ изменения направления тяги движителей позволяет выполнить летательные аппараты простыми по конструкции, относительно дешёвыми, на базе автомобиля, компактными за счёт разворота крыла вдоль корпуса, не требующих аэродромов и способные взлетать с любой площадки. Всё выше перечисленное обеспечивает заявленный технический эффект предложенного изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОНИТОРИНГА СОСТОЯНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ ПРИ ДВИЖЕНИИ ПОЕЗДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2829561C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПРИ ДВИЖЕНИИ ПОЕЗДА МЕТРОПОЛИТЕНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ С ПРИМЕНЕНИЕМ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2022 |
|
RU2829794C2 |
| СПОСОБ ПОДЪЁМА И МАНЕВРИРОВАНИЯ В ПОЛЁТЕ МЯГКИМ КРЫЛОМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2828629C1 |
| ТРАНСПОРТНАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ | 2020 |
|
RU2790417C2 |
| ТРАСПОРТНОЕ СРЕДСТВО С КРЫЛОМ | 2019 |
|
RU2722732C1 |
| Летательный аппарат | 2021 |
|
RU2770513C2 |
| Самолёт вертикального взлёта и посадки | 2016 |
|
RU2641952C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С МЯГКИМ КРЫЛОМ И ДВИЖИТЕЛЕМ (ВАРИАНТЫ) | 2019 |
|
RU2830446C2 |
| Способ подъёма в стартовое положение мягкого крыла летательного аппарата | 2023 |
|
RU2821148C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2024 |
|
RU2838699C1 |




Изобретение относится к области авиации, в частности к конструкциям летательных аппаратов вертикального взлета и посадки. Летательный аппарат вертикального взлёта и посадки снабжён крылом или крыльями с жёстко закреплёнными как минимум двумя прямолинейными элементами, проходящими перпендикулярно через плоскость крыла и соединяющими жёстко пару движителей. При этом тяга движителей параллельна плоскости крыла и направлена поперёк крыла. В режиме подъёма плоскость крыла и тяга движителей перпендикулярны к земле. В горизонтальный режим аппарат переводится при нарушении равновесия тяги движителей. В горизонтальном полёте используется подъёмная сила крыла и горизонтальная тяга движителей. Крылья установлены на поворотную ось, соединённую с корпусом. Обеспечивается упрощение конструкции летательного аппарата вертикального взлета и посадки. 2 з.п. ф-лы, 25 ил.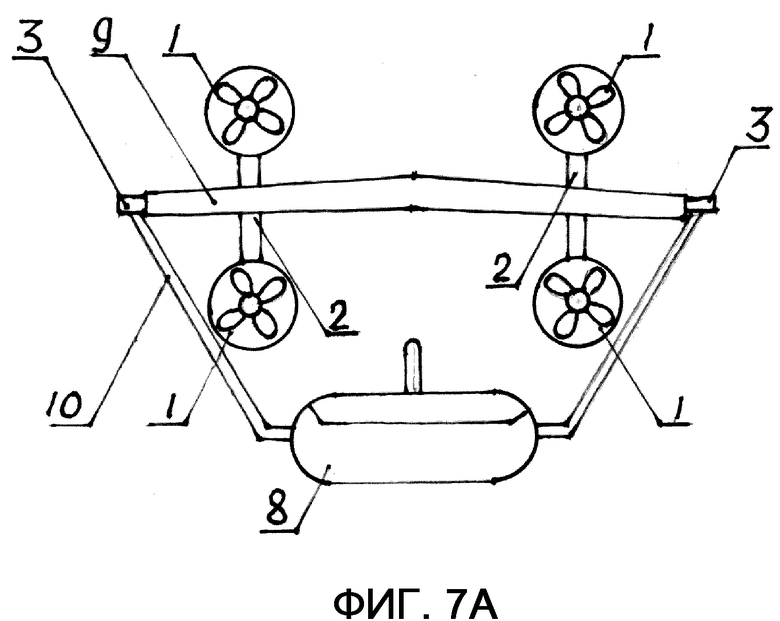
1. Летательный аппарат вертикального взлёта и посадки, отличающийся тем, что аппарат снабжён крылом или крыльями с жёстко закреплёнными как минимум двумя прямолинейными элементами, проходящими перпендикулярно через плоскость крыла и соединяющими жёстко пару движителей с тягой, параллельной плоскости крыла и направленной поперёк крыла, в режиме подъёма плоскость крыла и тяга движителей перпендикулярны к земле, в горизонтальный режим аппарат переводится при нарушении равновесия тяги движителей, в горизонтальном полёте используется подъёмная сила крыла и горизонтальная тяга движителей.
2. Летательный аппарат вертикального взлёта и посадки по п.1, отличающийся тем, что крылья насажены на поворотную ось, соединённую с корпусом.
3. Летательный аппарат вертикального взлёта и посадки по п.1, отличающийся тем, что корпус соединён подвесом с концами крыла на поворотных осях.
| WO 2019056052 A1, 28.03.2019 | |||
| WO 2012141736 A1, 18.10.2012 | |||
| ЛЕГКИЙ КОНВЕРТИРУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2015 |
|
RU2579235C1 |
| CN 107826247 A, 23.03.2018 | |||
| АВИАТРАНСФОРМЕР, ПРЕОБРАЗУЕМЫЙ В АВТОМОБИЛЬ | 2016 |
|
RU2650257C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА | 2013 |
|
RU2627261C2 |
| CN 107933909 A, 20.04.2018 | |||
| КОНВЕРТОПЛАН | 2011 |
|
RU2456208C1 |

