Изобретение относится к авиации, а именно, к самолётам вертикального взлёта и посадки (СВВП).
Основной областью применения предлагаемого СВВП является организация воздушных перевозок без привязки к существующей аэродромной сети и без необходимости строительства новых взлётно-посадочных полос.
Известно множество проектов СВВП, которые появились во 2-й половине 20-го века [Ружицкий Е.И. Американские самолёты вертикального взлёта. - М.: ООО «Издательство Астрель», 2000. - 192 с.: ил., Хафер К., Закс Г. Техника вертикального взлёта и посадки. Пер. с нем. - М.: Мир, 1985. - 376 с., ил.]. При этом с самого начала все разрабатывавшиеся компоновки СВВП можно было отнести к двум различным типам:
a) СВВП, сохраняющие горизонтальное положение фюзеляжа как в крейсерском полёте, так и на режимах вертикального взлёта и посадки (ВВП), как правило, за счёт поворота силовой установки и/или воздушных винтов;
б) «тайлситтеры» или, буквально, «садящиеся на хвост» – СВВП, не имеющие поворотных силовых установок и/или воздушных винтов, и целиком поворачивающиеся в вертикальное положение на режимах ВВП.
Несомненным достоинством «тайлситтеров» считалась более высокая весовая эффективность и надёжность, поскольку у них отсутствовали механизмы поворота двигателей и винтов. Поэтому такие СВВП привлекли внимание военных. Так, фирма «Локхид» разрабатывала проект СВВП XFV-1 Salmon для ВМФ США [Ружицкий Е.И. Американские самолёты вертикального взлёта. - М.: ООО «Издательство Астрель», 2000. - 192 с.: ил.]. Особенностью этого СВВП было вертикальное положение при нахождении на земле перед взлётом и после посадки. Для этого СВВП имел Х-образное хвостовое оперение, оснащённое опорами шасси. Вертикальный взлёт и посадка (ВВП) выполнялись за счёт тяги соосного воздушного винта, расположенного в носовой части фюзеляжа и приводимого во вращение газотурбинным двигателем (ГТД). После вертикального взлёта СВВП постепенно поворачивался в горизонтальное положение и выполнял крейсерский полёт как обычный самолёт.
Достоинством данного технического решения является возможность достижения в крейсерском полёте высокого аэродинамического качества и хороших лётно-технических характеристик (ЛТХ) за счёт большого удлинения крыла. Главный же недостаток состоит в низкой эффективности и плохой управляемости на режимах ВВП, поскольку здесь управление движением СВВП обеспечивается только отклонением аэродинамических рулей, обдуваемых струёй винта. Для создания необходимых управляющих моментов требуется высокая скорость в струе, а достичь её можно только увеличением нагрузки на ометаемую площадь винта, что снижает КПД винта и увеличивает расход топлива на режимах ВВП.
Известен также летательный аппарат (ЛА), называемый квадрокоптером, относящийя к классу мультикоптеров, и являющийся функциональным аналогом вертолёта [Ерохин Е., Коломиец А. Мультикоптеры: новый вид. http://www.uav.ru/articles/multicopters.pdf Июль, 2016]. Подъёмная сила у квадрокоптера создаётся четырьмя воздушными винтами, расположенным в вершинах черырёхугольника, как правило, квадрата, и приводимых во вращение индивидуальными электродвигателями (ЭД). Поэтому в качестве источника энергии используются аккумуляторные батареи (АКБ), или топливные элементы [Российский БПЛА установил мировой рекорд длительности полёта. http://aex.ru 22 апреля, 2016], располагаемые, как правило, в геометрическом центре аппарата. Там же находятся система управления и полезная нагрузка.
Важной особенностью квадрокоптера является то, что оси вращения воздушных винтов не поворачиваются относительно его конструкции, а управляющие силы и моменты создаются только путём изменения тяги винтов. Этим квадрокоптер принципиально отличается от вертолёта, для управления которым необходимо оснащение несущего винта механическим устройством управления общим и циклическим шагом, называемым в отечественной литературе автоматом перекоса (АП). Вместе с тем, неотъемлемым элементом конструкции квадрокоптера является электронная автоматическая система улучшения устойчивости (АСУУ), измеряющая с помощью датчиков (гироскопов и акселерометров) параметры движения ЛА и регулирующая тягу винтов путём изменения мгновенной мощности (и частоты вращения) ЭД приводов. Именно малое время переходных процессов, свойственное ЭД, обеспечивает квадрокоптеру приемлемые характеристики устойчивости и управляемости при использовании воздушных винтов без АП. Таким образом, квадрокоптер, сохраняя функциональность и эффективность вертолёта, оказывается проще по конструкции, надёжней в эксплуатации и дешевле по стоимости.
Основными недостатками квадрокоптера являются малая дальность и продолжительность полёта, что обусловлено недостаточно высокой энергоёмкостью современных АКБ. Кроме того, как и вертолёт, квадрокоптер обладает невысокой максимальной скоростью полёта, обычно, не более 100 км/ч. Поэтому стремление улучшить лётно-технические характеристики квадрокоптера привело к появлению таких ЛА, как Project Wing компании Google , VertiKUL, Quadshot, X Plus One и т.д. [http://www.computerra.ru/ 105964/google_project-wing/ Май, 2015, http://nauka21vek.ru/archives/17132 Май, 2015, http://t-human.com/journal/hybrid-quadrotor-gibrid-bespilotnogo-samolyota-s-kvadralyotom/ Май, 2015, http://www.nasa.gov/aero/testing-electric-propulsion.html Май, 2015]. Главной особенностью этих проектов является объединение в одном ЛА квадрокоптера с самолётом схемы «летающее крыло» или «бесхвостка». В результате за счёт аэродинамического качества самолёта достигается повышение дальности и продолжительности полёта при сохранении возможности ВВП.
Тем не менее у такого решения тоже есть недостатки и обусловлены они недостатками схем «летающее крыло» и «бесхвостка». Это большие потери подъёмной силы на продольную балансировку, снижающие аэродинамическое качество и вынуждающие уменьшать удельную нагрузку на крыло, из-за чего увеличивается парусность, повышается чувствительность к ветровым возмущениям, снижаются ЛТХ [Проектирование самолётов/ Егер С.М., Мишин В.Ф., Лисейцев Н.К. и др. – М., Машиностроение, 1983, 616 с.].
Таким образом, квадрокоптер способен обеспечить высокую эффективность режимов ВВП, но даже в комбинации с «летающим крылом» или «бесхвосткой» проигрывает классической самолётной схеме в крейсерском полёте, а СВВП классической схемы, напротив, неэффективен на режимах ВВП, но обладает высоким аэродинамическим качеством и хорошими ЛТХ в крейсерском полёте.
Цель изобретения – обеспечить высокую эффективность режимов ВВП при сохранении хороших ЛТХ в крейсерском полёте. В предлагаемом СВВП данная цель достигается путём объединения достоинств квадрокоптера с преимуществами самолёта классической схемы. Кроме того, в сравнении с известными техническими решениями достигается значительное упрощение и удешевление конструкции СВВП.
Предлагаемый СВВП (см. фиг.1) состоит из фюзеляжа 1, крыла 2 и Х-образного хвостового оперения 3, на концах которого установлены ЭД 4, приводящие во вращение тянущие воздушные винты 5. Задние кромки крыла и оперения заняты аэродинамическими органами управления, выполняющими функции руля высоты (РВ), руля направления (РН) и элеронов. Для стоянки на земле в вертикальном положении консоли оперения оснащены опорами шасси.
Изобретение функционирует следующим образом.
На земле перед взлётом и после посадки СВВП находится в вертикальном положении, опираясь на опоры шасси, расположенные на консолях оперения. Взлёт осуществляется вертикально за счёт тяги воздушных винтов, расположенных на концах оперения. После отрыва и первоначального вертикального подъёма СВВП переходит в режим разгона до скорости горизонтального полёта. Для этого тяга воздушных винтов, находящихся на нижней поверхности СВВП, немного уменьшается, а на верхней поверхности – немного увеличивается. Возникающий в результате пикирующий момент наклоняет СВВП вперёд, а появляющаяся горизонтальная составляющая тяги винтов разгоняет его в горизонтальном направлении. При этом уменьшение вертикальной составляющей тяги винтов компенсируется увеличивающейся по мере разгона подъёмной силой крыла. Основную часть полёта СВВП совершает в горизонтальном положении как обычный самолёт, у которого воздушные винты и крыло создают горизонтальную тягу и подъёмную силу соответственно.
Перед вертикальной посадкой СВВП выполняет торможение в горизонтальном полёте, в процессе которого постепенно изменяет своё положение из горизонтального в вертикальное. Завершается торможение тем, что СВВП зависает неподвижно в воздухе, после чего начинает вертикально снижаться хвостом вниз до касания земли опорами шасси.
Управление на режимах ВВП и, частично, на переходных участках полёта осуществляется по технологии квадрокоптера за счёт изменения тяги воздушных винтов. При этом устойчивость полёта обеспечивает АСУУ, измеряющая с помощью датчиков параметры движения СВВП и регулирующая тягу воздушных винтов путём изменения мгновенной мощности ЭД приводов в соответствии с заранее разработанным алгоритмом.
Управление на режиме горизонтального полёта ничем не отличается от обычного управления самолётом с помощью РВ, РН и элеронов. Устойчивость полёта на этом режиме может быть обеспечена как естественным образом средствами аэродинамики, так и искусственно, за счёт применения АСУУ. Здесь важно отметить, что алгоритмы работы АСУУ на режимах ВВП и в крейсерском полёте различны, поэтому переход из одного режима полёта в другой должен сопровождаться переключением режимов АСУУ.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2024 |
|
RU2838699C1 |
| Одновинтовой скоростной вертолёт | 2022 |
|
RU2770945C1 |
| СПОСОБ МОНИТОРИНГА СОСТОЯНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ ПРИ ДВИЖЕНИИ ПОЕЗДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2829561C2 |
| Летательный аппарат | 2021 |
|
RU2770513C2 |
| МАЛОЗАМЕТНЫЙ БЕСПИЛОТНЫЙ САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2018 |
|
RU2693427C1 |
| Самолёт-амфибия укороченного взлёта и посадки | 2023 |
|
RU2796595C1 |
| САМОЛЁТ ВЕРТИКАЛЬНОГОГО ВЗЛЁТА И ПОСАДКИ | 2020 |
|
RU2736793C1 |
| Беспилотный винтокрыл | 2023 |
|
RU2831846C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПРИ ДВИЖЕНИИ ПОЕЗДА МЕТРОПОЛИТЕНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ С ПРИМЕНЕНИЕМ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2022 |
|
RU2829794C2 |
| Летательный аппарат вертикального взлёта и посадки с изменяемым направлением тяги движителей | 2019 |
|
RU2790454C2 |
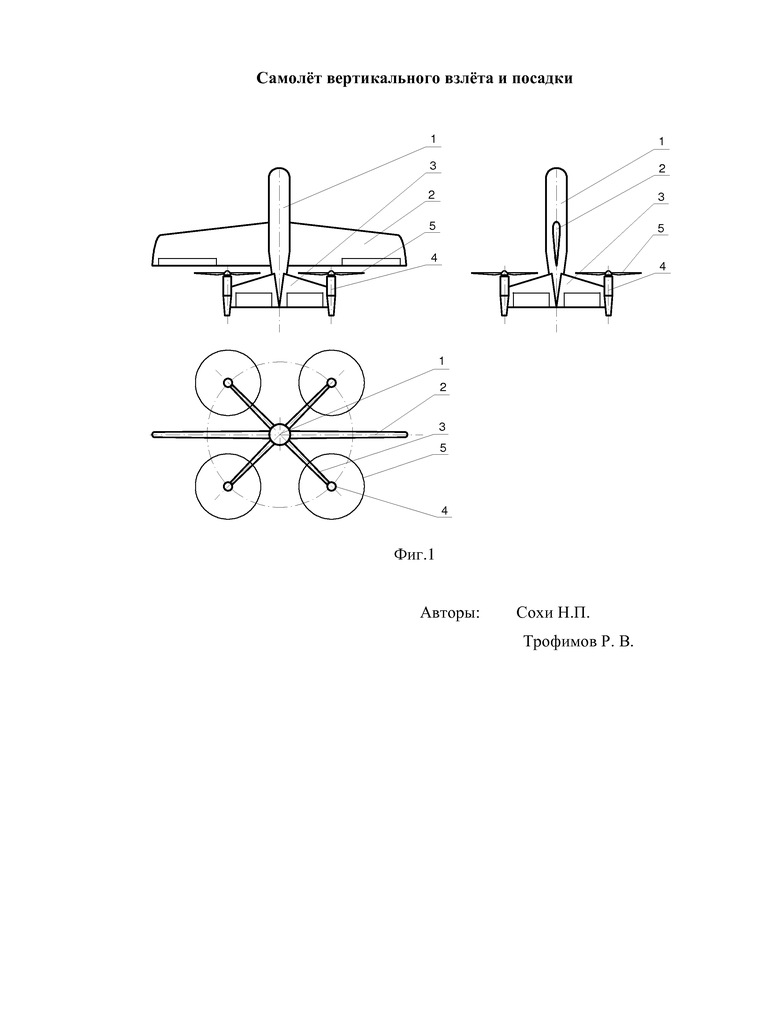
Изобретение относится к области авиации, в частности к конструкциям летательных аппаратов вертикального взлета и посадки. Самолёт вертикального взлёта и посадки содержит фюзеляж, крыло и Х-образное хвостовое оперение, снабжённое опорами шасси. На конце каждой консоли хвостового оперения установлен воздушный винт, приводимый во вращение собственным электрическим двигателем. Общее количество воздушных винтов на хвостовом оперении должно быть больше трёх, при этом скорость вращения каждого электрического двигателя регулируется автоматической системой улучшения устойчивости. Обеспечивается высокая эффективность режимов ВВП при сохранении хороших летно-технических характеристик в крейсерском полете. 1 ил.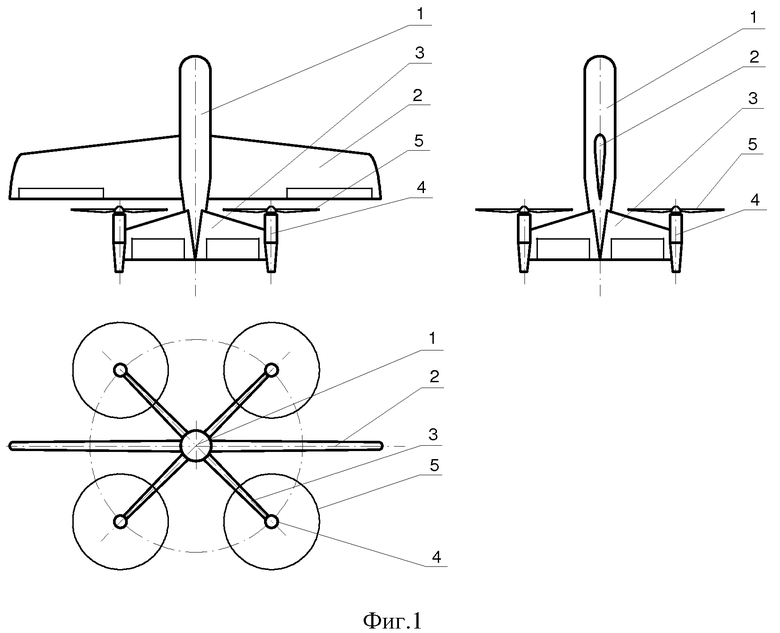
Самолёт вертикального взлёта и посадки, состоящий из фюзеляжа, крыла и Х-образного хвостового оперения, снабжённого опорами шасси, отличающийся тем, что на конце каждой консоли хвостового оперения установлен воздушный винт, приводимый во вращение собственным электрическим двигателем, причём общее количество воздушных винтов на хвостовом оперении должно быть больше трёх, а скорость вращения каждого электрического двигателя регулируется автоматической системой улучшения устойчивости.
| ЛЕТАТЕЛЬНЫЙ АППАРАТ-КОНВЕРТОПЛАН-АМФИБИЯ (ВАРИАНТЫ) | 2005 |
|
RU2312795C2 |
| УСТРОЙСТВО ДЛЯ СВЧ-НАГРЕВА ЖИДКОСТИ | 2009 |
|
RU2402183C1 |
| US 2007187548 A1, 16.08.2007 | |||
| US 2016023743 A1, 28.01.2016. | |||

