Изобретение относится к области радионавигации воздушных судов и может быть использовано для определения плановых координат воздушных судов, оборудованных спутниковой навигационной системой, в условиях мешающего воздействии на эту систему неизвестного источника помех.
Известны системы и способы определения и слежения за местоположением подвижных объектов по сигналам глобальной навигационной спутниковой системы (ГНСС) [1, 2], в которых текущие координаты траектории перемещения определяются на борту объекта позиционирования с помощью бортовых навигационных приемников. При этом осуществляется прием навигационных радиосигналов, излучаемых навигационными космическими аппаратами ГНСС. Для надежного определения координат необходим одновременный устойчивый прием сигналов от нескольких навигационных космических аппаратов. Однако наличие мощных источников помех приводит к искажениям результатов определения координат, либо вообще не позволяет их оценить.
Способ определения плановых координат воздушного судна по измерениям пеленга неизвестного источника помехового излучения, в открытой публикации из всех доступных источников информации не найден.
Целью предлагаемого способа является определение воздушным судном своего местоположения при появлении помехового сигнала от неизвестного источника помех, нарушающего прием сигналов от ГНСС, за счет использования информации о своем местоположении до появления помехового сигнала и информации о направлениях на источник помех, измеряемых на борту воздушного судна с использованием бортового радиопеленгатора.
В основу способа положено определение координат неизвестного источника помех по измерениям его пеленга на борту воздушного судна в двух точках с координатами, измеренными спутниковой навигационной системой в условиях, когда ее работа еще не нарушена помеховым сигналом, а сам помеховый сигнал уверенно принимается бортовым радиопеленгатором, и дальнейшее определение координат воздушного судна по вычисленным координатам источника помех и измерениям его пеленга в двух точках, лежащих на одном курсе полета воздушного судна, в условиях нарушения работы ГНСС помеховым сигналом неизвестного источника помех.
Техническим результатом предлагаемого изобретения является возможность определения плановых координат воздушного судна при нарушении работы ГНСС помеховым сигналом неизвестного источника помех, используя координаты местоположения этого источника, вычисленные на борту воздушного судна по измерениям пеленга этого источника помехового излучения бортовым радиопеленгатором.
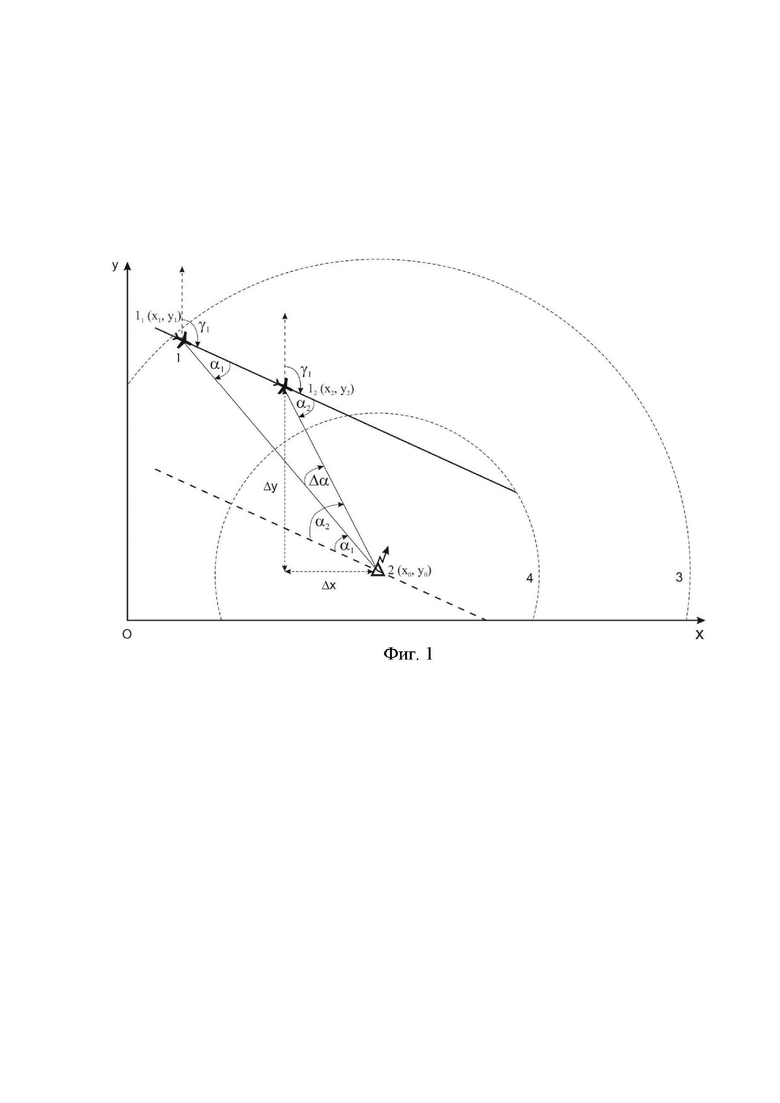
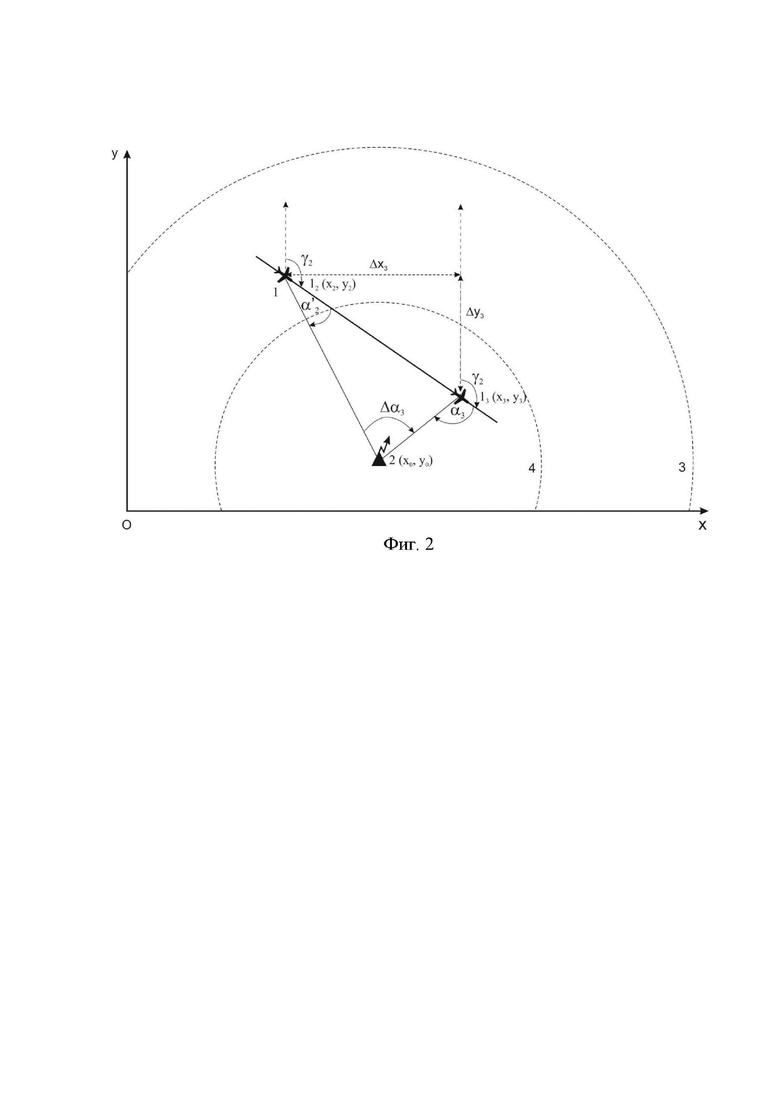
Сущность изобретения поясняется рисунками, где на фиг. 1 приведена схема, поясняющая принцип определения координат неизвестного источника помех по измерениям его пеленга на борту воздушного судна в двух точках с координатами, измеренными спутниковой навигационной системой в условиях, когда ее работа еще не нарушена помеховым сигналом, а сам помеховый сигнал уверенно принимается бортовым радиопеленгатором, а на фиг. 2 приведена схема, поясняющая принцип определения координат воздушного судна по вычисленным координатам источника помех и измерениям его пеленга в двух точках, лежащих на одном курсе полета воздушного судна, в условиях нарушения работы ГНСС помеховым сигналом неизвестного источника помех.
Способ определения плановых координат воздушного судна по измерениям пеленга неизвестного источника помехового излучения заключается в следующем.
Воздушное судно 1 в процессе полета попадает в зону излучения 3 неизвестного источника помехового излучения 2, где работа навигационной аппаратуры потребителей (НАП) ГНСС еще не нарушена помеховым излучением, а само помеховое излучение уверенно принимается бортовым радиопеленгатором воздушного судна 1.
В точке 11 воздушное судно 1 в момент времени  :
:
- определяет свои координаты  с использованием НАП ГНСС в системе координат xOy, в которой ось Oy направлена на Север, а ось Ox - на Восток;
с использованием НАП ГНСС в системе координат xOy, в которой ось Oy направлена на Север, а ось Ox - на Восток;
- измеряет курс полета  с использованием инерциальной навигационной системы относительно направления на Север;
с использованием инерциальной навигационной системы относительно направления на Север;
- измеряет курсовой угол неизвестного источника излучения  (угол в горизонтальной плоскости между направлением на неизвестный источник помехового излучения 2 и продольной осью воздушного судна 1, измеряется от продольной оси воздушного судна 1 по часовой стрелке) с использованием бортового пеленгатора.
(угол в горизонтальной плоскости между направлением на неизвестный источник помехового излучения 2 и продольной осью воздушного судна 1, измеряется от продольной оси воздушного судна 1 по часовой стрелке) с использованием бортового пеленгатора.
Двигаясь с тем же курсом и, не входя в зону 4 радиоподавления НАП ГНСС неизвестным источником помехового излучения 2, в момент времени  воздушное судно 1 в точке 12:
воздушное судно 1 в точке 12:
- определяет свои координаты  с использованием НАП ГНСС;
с использованием НАП ГНСС;
- измеряет курсовой угол неизвестного источника помехового излучения  с использованием бортового пеленгатора.
с использованием бортового пеленгатора.
В точке 12 воздушное судно 1 вычисляет координаты неизвестного источника помехового излучения 2 (Фиг. 1), для чего:
- из треугольника 11-12-2 по теореме синусов вычисляется текущее радиальное удаление неизвестного источника помехового излучения от точки 12:

где  - расстояние между точками 12 и 11,
- расстояние между точками 12 и 11,  ;
;
- вычисляются текущие значения удаления неизвестного источника помехового излучения 2 от точки 12 по координатам x и y:


- вычисляются координаты неизвестного источника помехового излучения 2:


Определив координаты неизвестного источника помехового излучения 2, воздушное судно 1, в общем случае, в точке 12 может поменять курс полета на  , значение которого контролируется по инерциальной навигационной системе, при этом курсовой угол неизвестного источника помехового излучения 2 составит значение
, значение которого контролируется по инерциальной навигационной системе, при этом курсовой угол неизвестного источника помехового излучения 2 составит значение  , которое измеряется с использованием бортового пеленгатора.
, которое измеряется с использованием бортового пеленгатора.
Двигаясь с курсом  воздушное судно 1 входит в зону 4 радиоподавления НАП ГНСС неизвестным источником помехового излучения 2, где определение координат с использованием НАП ГНСС становится невозможным, и в момент времени
воздушное судно 1 входит в зону 4 радиоподавления НАП ГНСС неизвестным источником помехового излучения 2, где определение координат с использованием НАП ГНСС становится невозможным, и в момент времени  воздушное судно 1 в точке 13 (Фиг. 2):
воздушное судно 1 в точке 13 (Фиг. 2):
- измеряет курсовой угол неизвестного источника помехового излучения 2  с использованием бортового пеленгатора.
с использованием бортового пеленгатора.
В точке 13 воздушное судно 1 вычисляет свои текущие координаты (Фиг. 2), для чего:
- из треугольника 12-13-2 по теореме синусов вычисляется текущее радиальное удаление точки 13 от точки 12:

где  - радиальное удаление неизвестного источника помехового излучения 2 от точки 12, которое в общем случае может быть определено
- радиальное удаление неизвестного источника помехового излучения 2 от точки 12, которое в общем случае может быть определено


- вычисляются текущие значения радиального удаления точки 13 от точки 12 по координатам x и y:


- вычисляются текущие координаты воздушного судна 1 в точке 13:


В дальнейшем при полете воздушного судна 1 в пределах зоны 4 радиоподавления НАП ГНСС неизвестным источником помехового излучения 2 для определения текущих координат воздушного судна 1  в момент времени
в момент времени  требуется следующая информация:
требуется следующая информация:
- координаты  неизвестного источника помехового излучения 2, вычисленные предложенным способом;
неизвестного источника помехового излучения 2, вычисленные предложенным способом;
- координаты воздушного судна 1  в предыдущий момент времени
в предыдущий момент времени  , вычисленные предложенным способом;
, вычисленные предложенным способом;
- значение курса полета воздушного судна 1  на интервале
на интервале  , измеренное инерциальной навигационной системой;
, измеренное инерциальной навигационной системой;
- значения курсового угла неизвестного источника помехового излучения 2  и
и  , измеренные бортовым пеленгатором в моменты времени и
, измеренные бортовым пеленгатором в моменты времени и  соответственно.
соответственно.
При этом вычисления осуществляются по формулам (6)-(12), в которых индекс 2 меняется на индекс i-1, а индекс 3 меняется на индекс i.
Для примера рассмотрим результаты компьютерного моделирования предложенного способа при следующих исходных данных.
Координаты неизвестного источника помехового излучения 2:
x0=0; y0=0.
Координаты воздушного судна 1:
Значения курса полета:
 ;
;
 .
.
Значения курсового угла неизвестного источника помехового излучения 2:
 ;
;
 ;
;
 ;
;
 .
.
В ходе моделирования считалось, что значения курса полета и курсового угла неизвестного источника помехового излучения 2 измеряются со случайной погрешностью, распределенной по нормальному закону с нулевым математическим ожиданием и среднеквадратическим отклонением, равным 0,01°.
В ходе моделирования получены:
- оценки координат неизвестного источника помехового излучения 2:
 м;
м;
 м,
м,
при этом погрешность определения координат x и y неизвестного источника помехового излучения 2 составила - 13,4 м и 3,7 м соответственно;
- оценки текущих координат воздушного судна 1 в точке 13:
 м;
м;
 м,
м,
при этом погрешность определения текущих координат x и y воздушного судна 1 составила 30 м и -50 м соответственно.
Таким образом, предлагаемый способ позволяет определять плановые координаты воздушных судов, оборудованных спутниковой навигационной системой, в условиях мешающего воздействии на эту систему неизвестного источника помехового излучения, по измерениям пеленга этого источника помехового излучения бортовым радиопеленгатором.
Источники информации.
1. Патент №2490665 РФ, МПК G01S 19/42. Система определения местоположения подвижного объекта по сигналам глобальных навигационных спутниковых систем / С.П. Баринов, Д.С. Непогодин (РФ); Открытое акционерное общество «Российский институт радионавигации и времени» (РФ). - №2012111956; заявлено 27.03.2012, опубл. 20.08.2013, бюл. №23. 13 с.: 3 ил.
2. Патент №2529016 РФ, МПК G01S 19/45. Способ определения местоположения подвижного объекта при навигационных измерениях / А.В. Тельный (РФ); Тыльный Андрей Викторович (РФ). - №212149512; заявлено 21.11.2012, опубл. 27.09.2014, бюл. №27. 33 с: 7 ил.
3. Патент №2020505РФ, МПК G01S 3/02. Бортовой радиопеленгатор / Л.В. Винокуров, Е.А. Елизаров (РФ); Винокуров Леонид Васильевич, Елизаров Евгений Андреевич (РФ). № 4417887; заявлено 29.04.1988, опубл. 30.09.1994. – 4 с.: 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЛЕТНЫХ ПРОВЕРОК НАЗЕМНЫХ СРЕДСТВ РАДИОТЕХНИЧЕСКОГО ОБЕСПЕЧЕНИЯ ПОЛЕТОВ И УСТРОЙСТВА ДЛЯ ЕГО ПРИМЕНЕНИЯ | 2011 |
|
RU2501031C2 |
| Способ определения координат воздушного судна по сигналам несинхронизированных передатчиков помех глобальным навигационным спутниковым системам | 2023 |
|
RU2811068C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2822088C1 |
| Интегрированный комплекс бортового оборудования беспилотного летательного аппарата | 2023 |
|
RU2809930C1 |
| Навигационная аппаратура санкционированного потребителя с возможностью локальной навигации по сигналам несинхронизированных отечественных средств радиоэлектронного подавления глобальных навигационных спутниковых систем | 2021 |
|
RU2771435C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2551355C1 |
| Пространственно-распределенная система радиоподавления НАП ГНСС с функцией альтернативного координатно-временного обеспечения для санкционированных потребителей | 2017 |
|
RU2649407C1 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2496131C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ВЫСОКОТОЧНОГО ОДНОЭТАПНОГО ПЕЛЕНГАТОРА И АДРЕСНО-ОТВЕТНОЙ ПАКЕТНОЙ ЦИФРОВОЙ РАДИОЛИНИИ В ДКМВ ДИАПАЗОНЕ | 2016 |
|
RU2613369C1 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2014 |
|
RU2598111C9 |
Изобретение относится к области радионавигации воздушных судов. Сущность способа заключается в определении координат неизвестного источника помех по измерениям его пеленга на борту воздушного судна в двух точках с координатами, измеренными спутниковой навигационной системой в условиях, когда ее работа еще не нарушена помеховым сигналом, который уверенно принимается бортовым радиопеленгатором. В дальнейшем координаты воздушного судна определяются по вычисленным координатам источника помех и измерениям его пеленга в двух точках, лежащих на одном курсе полета воздушного судна, в условиях нарушения работы ГНСС помеховым сигналом неизвестного источника помех. Техническим результатом предлагаемого изобретения является возможность определения плановых координат воздушного судна при нарушении работы ГНСС помеховым сигналом неизвестного источника помех, используя координаты местоположения этого источника, вычисленные на борту воздушного судна по измерениям пеленга этого источника помехового излучения бортовым радиопеленгатором. 2 ил.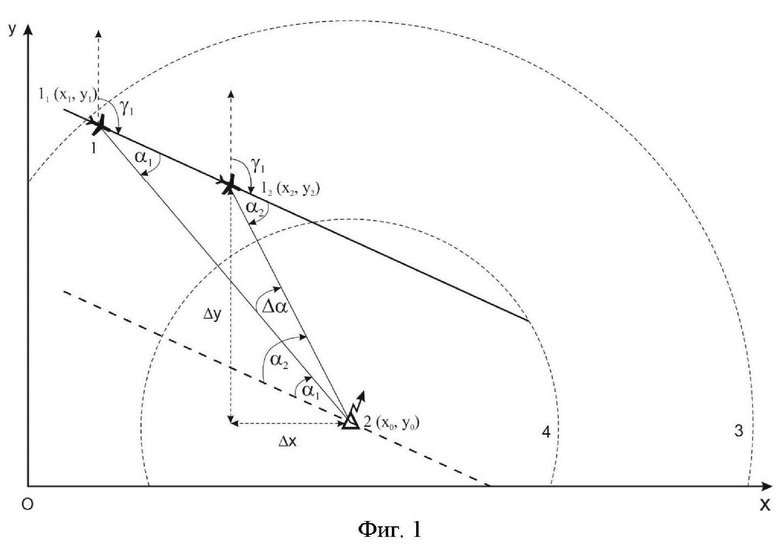
Способ определения плановых координат воздушного судна по измерениям пеленга неизвестного источника помехового излучения, осуществляющийся в условиях, когда работа навигационной аппаратуры потребителей ГНСС еще не нарушена помеховым излучением, а само помеховое излучение уверенно принимается бортовым радиопеленгатором воздушного судна, при этом способ включает:
- определение собственных плановых координат x1,y1 в точке 11 и x2,y2 в точке 12 в моменты времени t1 и t2;
- измерение в точке 11 курса своего полета  на интервале времени t1, t2 с использованием инерциальной навигационной системы воздушного судна;
на интервале времени t1, t2 с использованием инерциальной навигационной системы воздушного судна;
- измерение значений курсового угла неизвестного источника излучения  в точке 11,
в точке 11,  в точке 12 в моменты времени t1 и t2 с использованием бортового радиопеленгатора;
в точке 12 в моменты времени t1 и t2 с использованием бортового радиопеленгатора;
- вычисление текущего радиального удаления неизвестного источника помехового излучения от точки 12:
 ;
;
- вычисление координат неизвестного источника помехового излучения:
 ,
,
 ;
;
- измерение в точке 12 нового курса полета  на интервале времени [t2, t3] с использованием инерциальной навигационной системы воздушного судна;
на интервале времени [t2, t3] с использованием инерциальной навигационной системы воздушного судна;
- измерение нового значения курсового угла  неизвестного источника излучения в точке 12 с использованием бортового радиопеленгатора;
неизвестного источника излучения в точке 12 с использованием бортового радиопеленгатора;
в условиях нарушения работы бортовой спутниковой навигационной системы помеховым сигналом неизвестного источника излучения, в последующий момент времени t3:
- измерение значения курсового угла  неизвестного источника излучения в точке 13 с использованием бортового радиопеленгатора;
неизвестного источника излучения в точке 13 с использованием бортового радиопеленгатора;
- вычисление текущего радиального удаления точки 13 от точки 12:
 ,
,
- вычисление текущих координат воздушного судна в точке 13:
 ,
,
 .
.
| Способ определения координат воздушного судна в спутниковой-псевдоспутниковой многопозиционной системе наблюдения | 2019 |
|
RU2715059C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА В СРЕДЕ ГЛОБАЛЬНЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2015 |
|
RU2578671C1 |
| ЩЕЛЕВОЕ УПЛОТНЕНИЕ РАБОЧЕГО КОЛЕСА НАСОСА | 2016 |
|
RU2656098C1 |
| EP 3309586 A1, 18.04.2018 | |||
| EP 2846174 A1, 11.03.2015. | |||

