Изобретение относится к радиотехнике и может быть использовано в системах контроля воздушного пространства для определения координат воздушного судна (ВС), используя для подсветки ВС навигационные сигналы глобальной навигационной спутниковой системы (ГНСС) и сигналы псевдоспутников (ПС).
Основным средством навигационного обеспечения полета ВС являются спутниковые системы навигации (ССН). Однако им присущ ряд существенных недостатков из-за эфемеридных и ионосферных погрешностей при измерении местоположения, что снижает эффективность их применения для решения задач посадки ВС, особенно в малоосвоенных и труднодоступных регионах.
Для повышения точности спутниковых систем навигации в зонах удаленных аэродромов перспективным является использование ПС, позволяющих сформировать дополнительное искусственное навигационное созвездие для навигационного обеспечения. Благодаря отсутствию у ПС эфемеридных и ионосферных погрешностей, а также увеличению количества навигационных опорных точек, используемых для решения навигационной задачи, обеспечивается повышение точности определения координат воздушных судов на этапе посадки.
Известно исследование точности определения координат воздушного судна в спутниковой-псевдоспутниковой многопозиционной системе наблюдения [1], в котором используются N спутников со своими координатами, М псевдоспутников со своими координатами и приемник, имеющий свои координаты. В зоне радиовидимости спутниковой-псевдоспутниковой многопозиционной системы находится воздушное судно с искомыми координатами. По рассеянным сигналам в этой системе осуществляется измерение расстояний вдоль пути распространения сигналов. В канале вторичной обработки приемника на основе измеренных расстояний с использованием сформированных систем уравнений итерационным методом наименьших квадратов рассчитываются координаты воздушного судна.
Недостатком рассматриваемого метода оценки координат является наличие погрешностей в определении координат итерационным методом.
Целью изобретения является повышение точности определения координат воздушного судна в спутниковой-псевдоспутниковой многопозиционной системе наблюдения
Поставленная цель достигается тем, что способ определения координат воздушного судна в спутниковой-псевдоспутниковой многопозиционной системе наблюдения, содержащей N спутников с координатами xj, yj, zj, j=1, 2, …, N, М псевдоспутников с координатами xj, yj, zj, j=N+1, N+2, …, N+M и приемник с координатами xП, yП, zП, в зоне радиовидимости которой находится воздушное судно с искомыми координатами х, у, z, осуществляющий определение координат воздушного судна на основе измерений по рассеянным сигналам расстояний  вдоль пути распространения «j-й навигационный спутник, псевдоспутник - воздушное судно - приемник» с использованием системы уравнений
вдоль пути распространения «j-й навигационный спутник, псевдоспутник - воздушное судно - приемник» с использованием системы уравнений

где

r0 - расстояние «воздушное судно - приемник»,
оценка неизвестных координат х, у, z находится в следующем виде
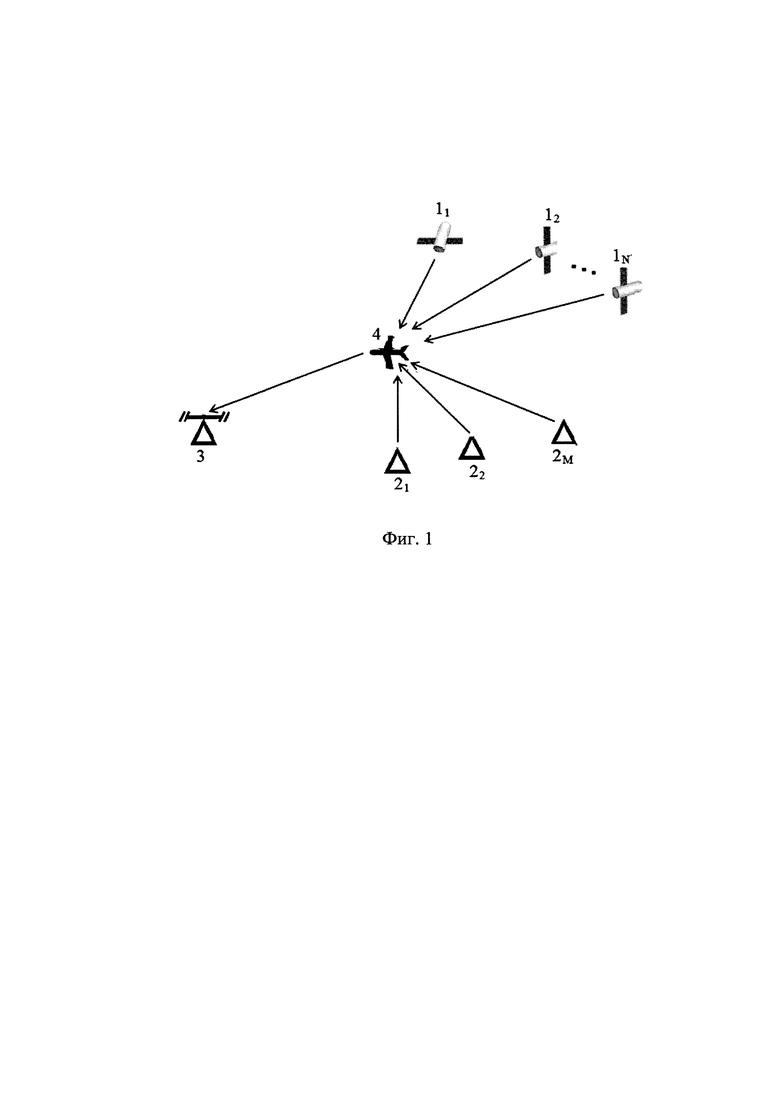
На Фиг. 1 приведена схема спутниковой-псевдоспутниковой многопозиционной системы наблюдения, состоящая из N спутников 11, 12, …, 1N, М псевдоспутников 21 22, …, 2М и приемник 3. В зоне радиовидимости спутниковой-псевдоспутниковой многопозиционной системы находится воздушное судно 4 с оцениваемыми координатами х, у, z.
Пространственное положение спутников 11, 12, …, 1N имеют координаты xj, yj, zj, с индексами j=1, 2, …, N, а псевдоспутников 21 22, …, 2М - координаты xj, yj, zj, с индексами j=N+1, N+2, …, N+M, приемник 3 имеет координаты хП, уП, zП.
Приемник 3 с координатами хП, уП, zП наряду с навигационными сигналами прямого распространения от спутников 1n и псевдоспутников 2m принимает навигационные сигналы, рассеянные воздушным судном 4 с неизвестными координатами х, у, z, находящимся в зоне действия многопозиционной системы наблюдения. Навигационные сигналы, рассеянные воздушным судном 4, выделяются на фоне навигационных сигналов прямого распространения одним из оценочно-корреляционно-компенсационных методов [2]. По рассеянным сигналам осуществляется измерение расстояний Rj=rj+r0 вдоль путей распространения «j-й спутник, псевдоспутник - воздушное судно - приемник», по выражению, имеющему вид:

или, после избавления от квадратного корня,
(х-хj)2+(у-yj)2+(z-zj)2=Rj2-2Rjr0+r02,
где j=1, 2, …, N+1, N+2, …, N+M - номер спутника и псевдоспутника,  - расстояние «воздушное судно - приемник».
- расстояние «воздушное судно - приемник».
Искомые координаты х, у, z воздушного судна 4 связаны с расстояниями Rj (j=1, 2, …, N+1, N+2, …, N+M) вдоль пути распространения «j-й спутник (псевдоспутник) - воздушное судно - приемник» с помощью системы уравнений

или, после раскрытия скобок

В системе уравнения расстояние г0 от воздушного судна 4 до приемника 3 заменяется выражением [(х-хп)2+(у-уп)2+(z-zп)2]2, которое позволяет избавиться от квадратных корней, давая возможность реализовать прямой способ расчета искомых координат.
Система уравнений (1), является нелинейной. Она содержит не известные параметры в степени два.
Линеаризация системы уравнений (1) проводится вычитанием из каждого j-го уравнения с номером j+1, приведя подобные члены, перенеся в правую часть известные данные, получается система из N+M-1 линейных уравнений

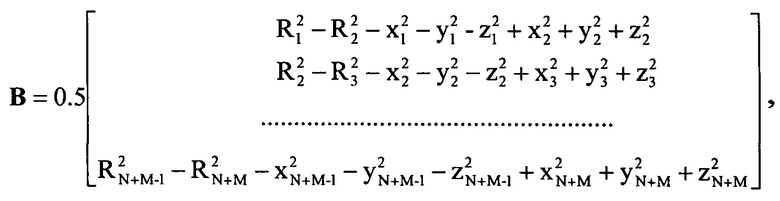
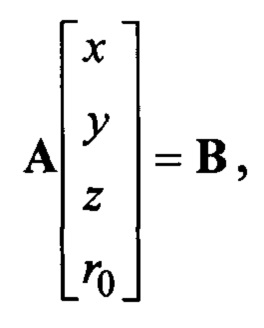
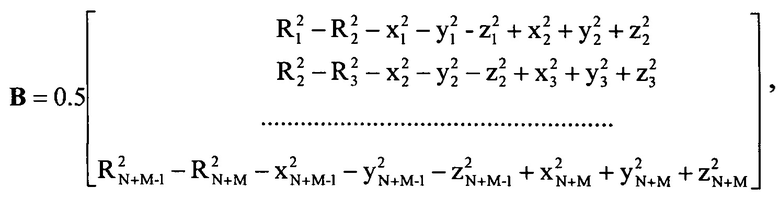
Матричная форма системы этих уравнений относительно искомых координат х, у, z воздушного судна 4 и расстояния r0 имеет вид

где


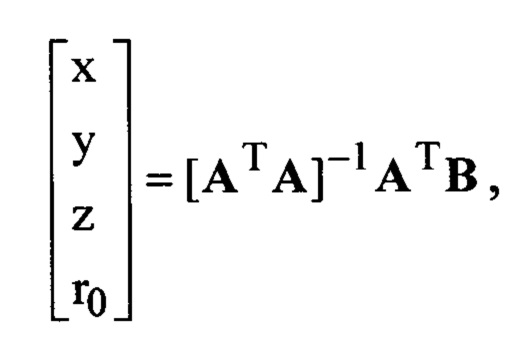
Если число спутников 1n и псевдоспутников 2m N+M=5, матрица А имеет 4-й порядок и квадратную форму. Оценку координат х, у и z воздушного судна 3 и расстояние r0 в этом случае находится по правилу решения обычной системы линейных уравнений (2) в следующем виде

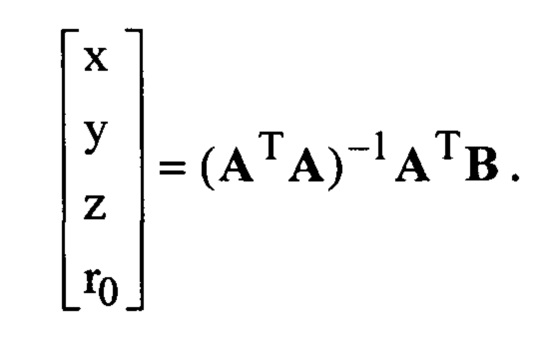
Если же количество спутников 1n и псевдоспутников 2m N+M>5, то матрица А в системе уравнений (2) будет прямоугольной - число строк равно N+M-1, а число столбцов равно 4. В этом случае для решения системы уравнений умножим обе части системы (2) на транспонированную матрицу AT

Произведение АТА представляет собой квадратную матрицу 4-го порядка. Умножая обе части системы (4) на обратную матрицу [AT А]-1, решение системы уравнений (2) для оценки координат получим в виде
Данная оценка координат получена решением исходной системы нелинейных уравнений безитерационным способом путем преобразования нелинейных уравнений в систему линейных уравнений, решаемой прямым методом.
Таким образом, предлагаемый способ определения координат воздушного судна в спутниковой-псевдоспутниковой многопозиционной системе наблюдения позволяет увеличить точность получаемой координатной информации за счет прямого решения системы нелинейных уравнений для расчета координат.
Приведем пример расчета неизвестных координат воздушного судна с применением предлагаемого способа.
Исходные данные, необходимые для контроля расчета:
Исходные координаты воздушного судна
х=3200, у=3500, z=370.
Расчет расстояния

Расчет расстояний

R1=12224,
R2=12839,
R3=12381,
R4=5532,
R5=4848,
R6=5779,
Исходные данные для расчета:
Координаты приемника
хп=500, уп=700, zn=100.
Координаты спутников
x1=1000, y1=1000, z1=8000
х2=2000, у2=1500, z2=9000
х3=1000, у3=2500, z3=8500
Координаты псевдоспутников
х4=2100, у4=2300, z4=500
x5=23Q0, у5=3200, z5=400,
х6=1500, у6=2700, z6=450.
Результаты расчета
Расчет матрицы А

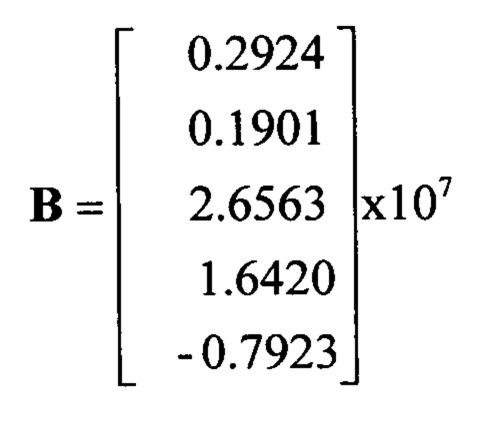
Расчет вектора В
Расчет матрицы [AT А]-1 AT
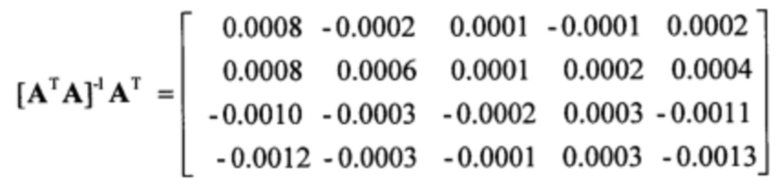
Оценка координат

Из сравнения исходных данных, необходимых для контроля расчета и полученных в результате расчета координат, видно, что рассчитанные координаты х, у и z воздушного судна предлагаемым способом совпадают с его исходными координатами заложенными в исходные данные, необходимые для контроля расчета.
Литература.
1. Кирюшкин В.В., Дьяконов Е.А. Исследование точности определения координат воздушной цели в спутниковой-псевдоспутниковой многопозиционной системе наблюдения. Международный информационно-аналитический журнал «Crede Experto: транспорт, общество, образование, язык». №2(13). Июнь 2017 (http://ce.if-mstuca.ru/wp-content/uploads/2017/02/kiryushkin-suprunov.pdf). 11 с.
2. Патент 2591052 РФ, МПК G01S 5/06, G01S 13/95. Способ обнаружения и оценки радионавигационных параметров сигнала космической системы навигации, рассеянного воздушной целью, и устройство его реализации / Кирюшкин В.В. и др. (РФ); Российская Федерация, от имени которой выступает Министерство обороны Российской Федерации (РФ), Федеральное государственное казенное военное образовательное учреждение высшего профессионального образования "Военный учебно-научный центр Военно-воздушных сил "Военно-воздушная академия имени профессора Н.Е. Жуковского и Ю.А. Гагарина" (г. Воронеж) Министерства обороны Российской Федерации (РФ). №2014101847/07; Заявлено 21.01.2014. Опубл. 27.07.2015, Бюл. №19. - 12 с.: 1 ил.
Изобретение относится к радиотехнике и может быть использовано в системах контроля воздушного пространства для определения координат воздушного судна (ВС), используя для подсветки ВС навигационные сигналы глобальной навигационной спутниковой системы (ГНСС) и сигналы псевдоспутников (ПС). Достигаемый технический результат - повышение точности определения координат воздушного судна в спутниковой-псевдоспутниковой многопозиционной системе наблюдения. Указанный результат достигается тем, что в способе определения координат воздушного судна в спутниковой-псевдоспутниковой многопозиционной системе наблюдения, содержащей N спутников с координатами xj, yj, zj, j=1, 2, …, N, M псевдоспутников с координатами xj, yj, zj, j=N+1, N+2, …, N+M, и приемник с координатами хП, уП, zП, в зоне радиовидимости которой находится воздушное судно с искомыми координатами х, у, z, определение координат воздушного судна осуществляют на основе измерений по рассеянным сигналам расстояний Rj вдоль пути распространения «j-й навигационный спутник, псевдоспутник - воздушное судно - приемник» с использованием прямого решения системы соответствующих нелинейных уравнений для расчета координат. 1 ил.
Способ определения координат воздушного судна в спутниковой-псевдоспутниковой многопозиционной системе наблюдения, содержащей N спутников с координатами xj, yj, zj, j=1, 2, …, N, и M псевдоспутников с координатами xj, yj, zj, j=N+1, N+2, …, N+M, и приемник с координатами хП, уП, zП, в зоне радиовидимости которой находится воздушное судно с искомыми координатами х, у, z, отличающийся тем, что с целью повышения точности определение координат х, у, z воздушного судна осуществляется на основе измерений по рассеянным сигналам расстояний Rj вдоль пути распространения «j-й навигационный спутник, псевдоспутник - воздушное судно - приемник» с использованием системы уравнений
где r0 - расстояние «воздушное судно - приемник»,

решение этой системы имеет вид
| КИРЮШКИН В.В | |||
| и др | |||
| Исследование точности определения координат воздушной цели в спутниковой-псевдоспутниковой многопозиционной системе наблюдения | |||
| Международный информационно-аналитический журнал "Crede Experto: транспорт, общество, образование, язык" | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ЗАХОДА НА ПОСАДКУ И ПОСАДКИ | 2002 |
|
RU2236020C2 |
| СИСТЕМА ВЫСОКОТОЧНОЙ АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2287838C2 |
| КОМПЛЕКСИРОВАННЫЙ УНИВЕРСАЛЬНЫЙ ВСЕПОГОДНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ПОСАДКИ ВОЗДУШНОГО СУДНА И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2441203C1 |

