Изобретение относится к устройству для установки послойного формирования тела из радиационно-отверждаемого материала, с емкостью, имеющей дно, для вмещения радиационно-отверждаемого материала, с рабочей платформой, находящейся над дном емкости и регулируемой по высоте относительно дна емкости, и с взаимодействующим с дном емкости датчиком, причем дно емкости по меньшей мере частично является гибким.
Изобретение относится также к способу послойного формирования тела из радиационно-отверждаемого материала, который находится в емкости, имеющей дно, и для каждого образуемого слоя тела рабочая платформа, регулируемая по высоте относительно дна емкости, перемещается вверх над дном емкости на высоту, которая определяется как расстояние между рабочей платформой или последним образованным слоем тела до дна емкости, больше ли равную толщине образующегося слоя тела; радиационно-отверждаемый материал для образования слоя тела селективно отверждается путем облучения источником излучения, и регулируемая по высоте рабочая платформа с присоединенным к ней отвержденным слоем тела отодвигается от положения покоя дна емкости, чтобы создать место для образования следующего слоя между отвердевшим слоем тела и дном емкости, причем дно емкости по меньшей мере частично является гибким, и датчик, взаимодействующий с дном емкости, определяет по меньшей мере один технологический параметр.
Устройства или способы послойного формирования трехмерного тела из радиационно-отверждаемого материала известны также под терминами 3D-печать, аддитивное производство или быстрое изготовление прототипов. При этом информация о поперечном сечении вещества, послойно отверждаемого электромагнитным излучением, например, фотополимера, обычно обеспечивается методом проекционной литографии или с помощью лазерного источника. На генеративных производственных станках, которые позволяют, например, непрерывный процесс печати, для световой экспозиции сечения или слоев чаще всего используются цифровые проекционные дисплеи (DLP, от Digital Light Processing) с пиксельным управлением, MEMS-дисплеи (дисплеи на основе микроэлектромеханической системы), жидкокристаллические дисплеи, светодиодные дисплеи или регулируемые лазеры. В результате экспонирования из жидкого светочувствительного материала образуется твердый слой. При этом слой прилипает к несущей основе и отделяется от базовой плоскости или удаляется с нее путем подъема несущей основы. На последующих этапах производства в качестве несущей основы действует затвердевший слой, отделенный от базовой плоскости. Таким образом, трехмерное тело последовательно вытягивается или формируется из светочувствительного материала.
Отверждающийся материал обычно находится в емкости с пропускающим свет и по меньшей мере частично гибким дном. При гибком дне емкости тянущие усилия, возникающие в процессе отделения затвердевшего слоя от дна емкости, могут быть сведены к минимуму, чтобы не допустить повреждения создаваемого тела или его отделения от рабочей платформы чрезмерно высокими тянущими усилиями.
Известной проблемой при этом является недостаток информации о том, когда образовавшееся тело отделилось от дна емкости. Соответственно, обычно прибегают к эмпирическому значению, которое также может варьироваться в зависимости от интенсивности вводимого излучения и геометрии отдельного отвержденного слоя.
EP 2173538 B2 относится к устройству для получения трехмерной детали путем отверждения отверждающегося материала, устройство содержит источник излучения, держатель детали с платформой, удерживающей деталь, емкость для вмещения отверждающегося материала, гибкую пленку или фольгу в зоне формирования детали, устройство перемещения для сдвига держателя детали, датчик и связанный с датчиком блок управления для управления устройством перемещения и источником излучения. Датчик предназначен для сканирования или измерения давления или натяжения гибкой пленки или гибкой фольги в зоне возведения. При этом датчик позволяет отслеживать критические для процесса факторы в режиме реального времени. Измеренное значение выдается на блок управления, чтобы скорректировать устройством перемещения перемещение или скорость перемещения держателя детали.
В US 2018/0194080 A1 описан способ изготовления трехмерных объектов с использованием непрерывного и прерывистого отверждения.
В AT 518566 A1 описано устройство для формирования объектов со стабильными размерами.
В US 2015/0064298 A1 описано устройство для стереолитографии.
Хотя известные устройства способны определять и управлять отдельными технологическими параметрами, существует потребность в усовершенствованных устройствах, в частности, для более обширного сбора и управления технологическими параметрами.
Таким образом, задачей изобретения является разработать устройство и способ указанного во введении типа, которые позволяют регистрировать и регулировать технологические параметры максимально простым и надежным способом и, таким образом, обеспечивают быстрое изготовление тела путем послойного формирования с минимально возможными отходами. Кроме того, необходимо надежно обнаруживать или предотвращать неисправности в производственном процессе.
Для этого изобретением предлагается устройство по пункту 1 и способ по пункту 15 формулы изобретения. Предпочтительные варианты осуществления и усовершенствования указаны в зависимых пунктах.
В соответствии с изобретением предусматривается наличие камеры, причем камера ограничена нижней стороной дна емкости, причем датчик переназначен для обнаружения изменения объема камеры и выдачи сигнала датчика, из которого можно установить знак изменения объема.
Устройство, которое является по меньшей мере частью установки послойного формирования тела из радиационно-отверждаемого материала, содержит емкости по меньшей мере с частично гибким дном для вмещения радиационно-отверждаемого материала. Для этого емкости выполнена непроницаемой для жидкости в такой степени, чтобы не допустить непредусмотренного вытекания отверждаемого вещества (отверждающегося материала) из емкости. Отверждающийся материал может отверждаться, например, электромагнитным излучением, в частности, светом, таким как видимый свет или ультрафиолетовое излучение (УФ). В частности, отверждающийся материал может представлять собой смолу. При этом отверждающийся материал может иметь вязкость, например, в диапазоне между вязкостью воды и вязкостью кашеобразного или пастообразного вещества. Над дном емкости находится рабочая платформа, которая регулируется по высоте относительно дна емкости. Рабочая платформа, которая целесообразно выполнена как плоская плита, служит площадкой, на которой послойно возводится тело путем локального облучения отдельных слоев отверждающегося материала. При регулировке высоты рабочей платформы устанавливается расстояние между рабочей платформой и дном емкости, то есть высота рабочей площадки определяется как расстояние до (нагруженного или ненагруженного, по существу горизонтального) дна емкости. Устройство также имеет датчик, который взаимодействует с дном емкости, чтобы можно было обнаруживать отклонения гибкого дна емкости от нагруженного или ненагруженного положения покоя. Для этого предусмотрена камера, которая ограничена нижней стороной дна емкости. Таким образом, дно емкости является частью корпуса камеры, которая находится под емкостью (то есть на противоположной отверждаемому веществу стороне дна емкости во время работы), и в камере находится сжимаемая или по существу несжимаемая среда. Таким образом, часть камеры, например, одна стенка камеры, образована дном емкости. Следовательно, камера является по существу закрытым или частично закрытым резервуаром, внутренне пространство которого местами ограничено дном емкости. Взаимодействующий с дном емкости датчик может быть размещен в камере или в полости примыкающего к камере объекта, например, в полости соединенного с камерой и взаимодействующего с внутренним пространством камеры шланга. Такой примыкающий к камере объект может рассматриваться, в частности, как часть камеры.
Датчик предназначен для обнаружения изменения объема камеры и выдачи сигнала датчика, из которого можно установить знак изменения объема. Таким образом, датчик предназначен, в частности, по меньшей мере для определения, увеличивается или уменьшается объем камеры, и предназначен в зависимости от этого для подачи сигнала с по меньшей мере двумя разными уровнями или формами сигнала: один уровень/форма сигнала в случае увеличения объема камеры и другой уровень/другая форма сигнала в случае уменьшения объема камеры. Затем разным уровням/формам сигнала могут быть сопоставлены положительный и отрицательный знаки изменения объема камеры. При этом изменения объема зависят от положения или прогиба дна емкости. Датчик может быть также предназначен для детектирования неизменности объема камеры, чтобы в этом случае выдавать сигнал датчика с третьим уровнем или третьей формой сигнала. Знак изменения объема не обязательно должен устанавливаться из единственного уровня сигнала датчика. Например, сигнал датчика может также позволять определение знака изменения объема на основе по меньшей мере двух уровней сигнала датчика, определенных в разное время.
В принципе, указанный выше сигнал датчика может также предоставляться датчиком, который может определять абсолютный объем камеры. То есть, такие датчики в принципе также могут использоваться. С одной стороны, изменение объема можно определить путем повторных измерений абсолютного значения объема и выдать соответствующий сигнал датчика (даже если определение фактически не выполняется, изменение объема все же может быть определено); с другой стороны, можно также сравнить отдельное абсолютное значение, например, с заранее заданным контрольным значением или с пороговым значением, чтобы выдать сигнал, из которого можно определить изменение объема или по меньшей мере его знак (например, чередование выше/ниже контрольного значения или выше/ниже порогового значения).
Изобретение не ограничено сигналами датчика, из которых можно установить только знак изменения объема. Равным образом, изобретение не ограничено сигналами датчика, которые содержат только знак изменения объема. Напротив, можно, например, использовать также сигналы датчика, которые указывают или включают в себя также (т.е. в дополнение к знаку) или даже исключительно абсолютное значение изменения объема, потому что соответствующий знак может уже правильно определяться из абсолютного значения. Так, например, при степени изменения выше заданного порогового значения можно исходить из того, что это означает уменьшение объема после отделения от дна емкости полученного последним слоя тела. При этом заданное пороговое значение можно по меньшей мере приблизительно установить из скорости перемещения рабочей платформы и площади последнего полученного слоя, поскольку эти параметры устанавливают абсолютное значение ожидаемой максимальной степени увеличения объема (т.е. максимального положительного изменения объема).
Кроме того, изобретение не ограничено единственным датчиком. Можно, например, предусмотреть несколько датчиков одного или разных типов, которые предназначены для детектирования изменения объема камеры и выдачи сигнала датчика, из которого можно установить знак изменения объема. При этом не требуется, чтобы изменение объема или его знак устанавливались на основе сигнала каждого отдельного датчика независимо от других датчиков и их сигналов. Наоборот, достаточно чтобы при определении изменения объема или его знака наряду с другими параметрами и сигналами датчиков учитывались сигналы отдельных датчиков; т.е. в контексте настоящей заявки возможность установления имеется для отдельных сигналов датчиков уже тогда, когда изменение объема или же только его знак определяются в конечном итоге из сигналов нескольких датчиков.
Благодаря наличию датчика предусмотрен для обнаружения изменения объема камеры и, тем самым, для обнаружения обусловленного процессом изменения положения дна емкости, устройство можно использовать для регистрации большого числа технологических параметров, связанных с изменением положения дна емкости. В частности, датчик может регистрировать только частичные, т.е. локальные изменения положения дна емкости. Соответственно, когда ниже говорится о положении дна емкости, это не обязательно означает равномерно или плоское расположение дна емкости. Напротив, место, расположение или прогиб дна емкости определяются также для изогнутого или по иному отклоненного от своего плоскостного расположения для емкости.
Когда в описании используются термины высота, горизонтальный, вертикальный, верхний, нижний, выше или ниже, эти термины или другую информацию о местоположении или направлении следует понимать в отношении места использования устройства.
Согласно одному предпочтительному варианту осуществления устройства, датчик предназначен для количественного определения измеряемого параметра, напрямую или косвенно пропорционального объему камеры или изменению объема, и выдачи в качестве сигнала датчика. Таким образом, объем или изменение объема камеры определяется путем детектирования измеряемого параметра, который прямо или косвенно пропорционален им. Датчик предназначен для определения этого измеряемого параметра и выдачи сигнала датчика, характеризующего значение измеряемого параметра.
Особенно предпочтительно, если датчик представляет собой датчик давления, предназначенный для определения давления и/или соответствующего изменению объема изменения давления сжимаемой среды, находящейся в камере, и/или находящийся в камере датчик расхода для обнаружения соответствующего изменению объема изменения количества вещества находящейся в камере текучей среды (т.е. газа или жидкости), причем датчик выполнен так, чтобы предоставлять в качестве измеряемого параметра определенное давление, и/или определенное изменение давления, и/или определенное изменение количества вещества и выдавать сигнал датчика. Давление, изменение давления и изменение количества вещества в камере представляют собой измеряемые параметры, которые напрямую или опосредовано пропорциональны объему камеры или изменению объема. Если датчик является датчиком давления, то в результате можно определить давление и/или изменение давления в камере, в частности, давление находящейся в камере сжимаемой среды. Таким образом, датчик давления в качестве датчика определяет изменение объема камеры через давление или изменение давления в камере. При этом давление, изменение давления, объем и изменение объема зависят от положения или прогиба дна емкости. Чтобы гарантировать надежное определение давления датчиком, камера в этом случае закрывается, по меньшей мере на время отклонения дна емкости от положения покоя и измерения давления или изменения давления, и выполнена по существу непроницаемой для сжимаемой среды. Закрытая камера не должна быть полностью герметичной, т.е. в ней могут иметься незначительные неплотности при условии, что обеспечивается функция устройства, в частности, по существу правильное определение давления, для процесса изготовления по меньшей мере одного создаваемого тела. Это означает, что камера давления может быть выполнена так, чтобы могло происходить медленное/инерционное выравнивание давления с окружающей средой, но все же можно детектировать обусловленные процессом градиенты давления. Датчик может быть также датчиком расхода, который выполнен и установлен так, чтобы определять соответствующее изменению объема изменение количества заключенного в камере вещества, то есть количества находящейся в камере текучей среды. В таком случае датчик, выполненный как датчик расхода, определяет изменение объема камеры через изменение количества вещества текучей среды в камере. При этом изменение количества вещества, объем и изменение объема зависят от положения или прогиба дна емкости. С этой целью камера имеет по меньшей мере одно отверстие, действующее как впуск и/или выпуск для текучей среды, т.е. может происходить обмен средой между внутренним объемом камеры и наружным окружением камеры или предусмотренным для этого резервуаром с текучей средой. Датчик расхода находится в отверстии или по меньшей мере вблизи отверстия, чтобы можно было определить поток текучей среды через отверстие в камеру или из камеры. В случае нескольких отверстий можно предусмотреть несколько датчиков расхода, каждый из которых соответствует одному отверстию, так что каждое отверстие предпочтительно имеет датчик расхода. Изменение объема можно в таком случае установить из баланса всех определенных изменений количества вещества. Для определения потока текучей среды не обязательно требуется высокая точность. Может быть достаточным определить мгновенное направление потока текучей среды, т.е. направлен ли он в камеру в случае увеличения объема или из камеры в случае уменьшения объема. Однако датчик расхода также может быть выполнен для указания определенного им потока текучей среды с более высокой точностью. Определение изменения объема через изменение количества вещества заключенной в камере текучей среды выгодно по сравнению с определением давления, поскольку из-за отверстия в камере автоматически может происходить выравнивание давления снаружи и внутри камеры, и можно избежать деформации дна емкости из-за изменения давления наружного воздуха (погода, место монтажа приборов). Кроме того, снижаются требования к герметичности камеры и, тем самым, снижается подверженность емкости повреждениям. Датчик давления предназначен для выдачи определенного давления, или определенного изменения давления, или по меньшей мере определенного знака изменения давления как сигнала датчика или выходного сигнала. Соответственно, датчик расхода предназначен для выдачи определенного изменения количества вещества или по меньшей мере определенного знака изменения количества вещества как сигнала датчика или выходного сигнала. В рамках настоящей заявки можно также параллельно использовать несколько разных датчиков, чтобы сочетать преимущества различных измерительных методов и достичь большей гибкости в отношении использования камеры. Например, датчик давления можно использовать вместе с несколькими датчиками расхода.
Согласно одному предпочтительному варианту осуществления устройства, датчик может быть соединен с обрабатывающим модулем, который предназначен для обработки полученного от датчика сигнала. Для этого обрабатывающий модуль может содержать микропроцессор или микроконтроллер. Кроме того, обрабатывающий модуль может быть связан с запоминающим устройством, который содержит данные и/или программные команды для обработки определенного датчиком изменения объема или пропорционального ему измеряемого параметра. Для обслуживания обрабатывающего модуля оператором обрабатывающий модуль может быть соединен с устройством ввода/вывода, например, сенсорным экраном. Благодаря наличию обрабатывающего модуля действия, необходимые для изготовления трехмерного тела, могут выполняться автоматически. Напротив, без обрабатывающего модуля эти действия должны были бы выполняться оператором вручную, для чего датчик должен быть подключен по меньшей мере к одному индикаторному устройству для отображения определенного изменения объема, или пропорционального ему измеряемого параметра, или устанавливаемого из одного или нескольких измеряемых параметров знака изменения объема.
Чтобы можно было надлежащим образом управлять устройством, предпочтительно, чтобы датчик через обрабатывающий модуль был соединен с приводным узлом для регулируемой по высоте рабочей платформы и/или с блоком управления источником излучения, который используется для облучения радиационно-отверждаемого материала, и обрабатывающий модуль предназначен для управления приводным узлом для регулируемой по высоте рабочей й платформы и/или блоком управления источником излучения в зависимости от сигнала, предоставленного датчиком. Таким образом, установленные датчиком значения давления, изменения давления или изменения количества вещества и/или установленный датчиком знак изменения объема могут передаваться на обрабатывающий модуль, предпочтительно в реальном времени, и там обрабатываться. Если обрабатывающий модуль соединен с приводным узлом для регулируемой по высоте рабочей платформы и предназначен для управления приводным узлом, регулировка высоты рабочей платформы может выполняться обрабатывающим модулем в зависимости от установленного давления, изменения давления или изменения количества вещества или в зависимости от определенного знака изменения объема камеры. Приводной блок позволяет перемещать рабочую платформу и, таким образом, создаваемое тело, по меньшей мере, в сторону дна емкости и от него. Приводной узел предпочтительно предназначен для доведения рабочей платформы или самого нижнего, то есть изготовленного самым последним, слоя тела до дна емкости. Приводной узел может содержать электродвигатель, например, шаговый электродвигатель, который соединен с рабочей платформой. В частности, электродвигатель находится в зацеплении с регулируемой по высоте штангой, при этом штанга соединена с рабочей платформой. Если обрабатывающий модуль подключен к блоку управления источником излучения и предназначен для управления этим блоком управления, облучение радиационно-отверждаемого материала может осуществляться обрабатывающим модулем в зависимости от определенного давления, изменения давления или изменения количества вещества или от установленного знака изменения объема камеры. Блок управления источником излучения и, таким образом, также обрабатывающий модуль предназначены для управления интенсивностью излучения и/или продолжительностью облучения. Источник излучения может представлять собой источник света, в частности, источник видимого света или УФ-излучения. Интенсивность излучения и/или продолжительность облучения обычно влияют на силу адгезии отвердевшего слоя, полученного при этой интенсивности излучения и/или продолжительности облучения, к ранее отвердевшему слою или к рабочей платформе.
Далее, предпочтительно, если камера соединена с по меньшей мере одним регулируемым источником давления для установки давления покоя в камере, и/или с регулируемым нагревательным устройством для установки температуры в камере, и/или с регулируемым источником технологического материала для регулируемой подачи технологической среды для по меньшей мере локального управления процессом затвердевания радиационно-отверждаемого материала в камере, и/или с источником воздушного потока для создания потока воздуха в камере. Регулируя давление покоя в камере, можно регулировать положение покоя дна емкости. Однако давление покоя можно менять также в процессе изготовления тела, например, для облегчения отделения последнего полученного слоя тела от дна емкости путем создания отрицательного или избыточного давления в камере. Избыточное давление в камере могло бы, например, способствовать отсоединению, если избыточное давление возникает периодически с или без комбинации с перемещением по оси Z (то есть подъемом или опусканием несущей основы). В случае самонесущей растянутой пленки избыточное давление также увеличивает натяжение пленки и, таким образом, дополнительно натягивает дно емкости, образованное пленкой, и, таким образом, делает его более жестким. Применение избыточного давления особенно выгодно при использовании полупроницаемой пленки, так как при использовании ингибитора, такого, например, как кислород, оно предотвращает прилипание или обеспечивает образование или по меньшей мере способствует образованию инертного промежуточного слоя для следующего слоя цикла. При этом избыточное давление благоприятствует диффузии ингибитора через полупроницаемую пленку. Регулирование температуры в камере может изменять вязкость или другие важные для процесса свойства содержащегося в емкости отверждающегося материала. Регулируемая подача технологической среды в камеру может по меньшей мере локально влиять на процесс твердения радиационно-отверждаемого материала. Технологическая среда может представлять собой ингибирующую среду, чтобы влиять на процесс твердения радиационно-отверждаемого материала, в частности, у дна емкости, в частности, замедлять его, и изменять силу адгезии последнего отвердевшего слоя ко дну емкости. Под ингибирующей средой понимается текучая среда, т.е. газ или жидкость, например, кислород, которая уменьшает или предотвращает затвердевание отверждающегося материала в граничном слое (например, 10-100 мкм) над дном емкости. Таким образом, ингибирующая среда уменьшает (в идеале предотвращает) прилипание последнего отвердевшего слоя ко дну емкости. Создавая воздушный поток в камере, можно сделать однородными свойства находящейся в камере среды, например, ингибирующей среды, или смеси сред в камере. В частности, можно сделать однородной температуру среды в камере и гомогенизировать концентрацию ингибирующей среды в камере. Кроме того, можно влиять на скорость диффузии ингибирующей среды, а также температуру. Источником воздушного потока может быть вентилятор или компрессор для регулирования объемного потока. Объемный поток может создаваться в камере в замкнутом контуре или за счет обмена с окружающим воздухом.
Для возможности надлежащего управления устройством предпочтительно также, если датчик через обрабатывающий модуль соединен с регулируемым источником давления, и/или с регулируемым нагревательным устройством, и/или с регулируемым источником технологической среды, и/или с источником воздушного потока, и обрабатывающий модуль предназначен для управления источником давления, и/или нагревательным устройством, и/или источником технологической среды, и/или источником воздушного потока в зависимости от сигнала, предоставленного датчиком. При этом датчик определяет текущее положение или перемещение дна емкости, по меньшей мере в форме текущего направления перемещения дна емкости (соответствующий знак изменения объема). Если датчик через обрабатывающий модуль соединен с регулируемым источником давления, обрабатывающий модуль может управлять источником давления, чтобы в зависимости от текущего положения или перемещения дна емкости изменять положение дна емкости путем повышения или снижения давления. Если датчик через обрабатывающий модуль соединен с регулируемым нагревательным устройством, обрабатывающий модуль может управлять нагревательным устройством, чтобы в зависимости от текущего положения или перемещения дна емкости изменять температуру среды в камере. Если датчик через обрабатывающий модуль соединен с регулируемым источником технологической среды, обрабатывающий модуль может управлять источником технологической среды, чтобы в зависимости от текущего положения или перемещения дна емкости изменять количество вводимой в камеру технологической среды, например, также, чтобы не вводить в камеру технологическую среду. Если датчик через обрабатывающий модуль соединен с источником воздушного потока, обрабатывающий модуль может управлять источником воздушного потока, чтобы в зависимости от текущего положения или перемещения дна емкости перемешивать среду в камере посредством воздушного потока, создаваемого источником воздушного потока.
Для экономически выгодного изготовления дна емкости и для того, чтобы датчик мог надежно и как можно точнее определять прогиб дна емкости, предпочтительно, чтобы дно емкости по меньшей мере частично пропускало излучение и предпочтительно содержало гибкую натянутую пленку. При этом излучение для отверждения находящегося в емкости отверждающегося материала может проникать к отверждающемуся материалу через по меньшей мере частично проницаемое для излучения дно емкости. Если источник излучения находится под камерой, целесообразно, чтобы камера, в частности, дно камеры, также по меньшей мере частично было выполнено проницаемым для излучения. Когда дно емкости содержит гибкую натянутую пленку, пленка должна быть достаточно непроницаемой, чтобы не допустить нежелательного прохождения отверждающегося материала через дно емкости. Пленка предпочтительно выполнена так, чтобы быть достаточно натянутой, чтобы избежать значительного провисания пленки при нагрузке отверждающимся веществом, т.е., чтобы можно было образовывать по существу плоские слои тела. Кроме того, пленка предпочтительно выполнена так, чтобы в натянутом состоянии быть достаточно эластичной, чтобы допускать прогибы в направлении дна камеры или от дна камеры, т.е. вниз или вверх. Дно емкости может содержать, например, силиконовые слои, пленку PTFE или тефлоновую пленку, а также их комбинации. Эластичнее свойства дна емкости служат для минимизации сил отрыва, возникающих в процессе отделения от дна последнего созданного слоя, которые в противном случае могли бы повредить создаваемое тело или отделить его от рабочей платформы.
В случае полупроницаемого дна емкости, проницаемого для технологической среды, находящаяся в камере технологическая среда может проникать через дно емкости и, например, в качестве ингибирующей среды уменьшать или, в идеале, предотвращать прилипание последнего созданного, т.е. отвердевшего слоя ко дну емкости. В результате операция отделения последнего полученного слоя от дна емкости облегчается или вообще становится ненужной. Например, дно емкости может быть проницаемым для кислорода как ингибирующей среды. При этом дно емкости непроницаемо для радиационно-отверждаемого материала. В качестве другой технологической среды можно использовать, например, дистиллированную воду. При этом воду можно довести до определенной температуры, например, 5°C. При этом подлежащее отверждению вещество охлаждается водой на граничной поверхности с дном емкости, и, таким образом, его реакционная способность в некоторой степени снижается. Это может привести к образованию столь же инертного граничного слоя и, тем самым, к уменьшению адгезии. При использовании высоковязкой текучей среды в качестве технологической среды, например, силиконового масла или специальных фторсодержащих масел, пленка может поддерживаться текучей средой в области экспонирования, и одновременно текучая среда может передавать разность давлений, например, на датчик давления.
Чтобы снизить нагрузку на дно емкости, можно предусмотреть, чтобы по меньшей мере часть дна емкости лежала на по меньшей мере частично проницаемой для излучения, в частности, прозрачной несущей плите. Благодаря по меньшей мере частичной опоре дна емкости на несущую плиту можно предотвратить, в частности, обусловленное старением усиливающееся провисание дна емкости вследствие нагрузки, оказываемой отверждающимся материалом. Таким образом, несущая плита служит в качестве опоры для дна емкости. Чтобы можно было отверждать отверждающийся материал источником излучения, находящимся под несущей плитой, целесообразно, чтобы несущая плита по меньшей мере частично была проницаемой для излучения, в частности, прозрачной. Например, несущая плита может быть по меньшей мере частично образована из стекла.
Чтобы при наличии несущей плиты уменьшить реакционную способность отверждающегося материала или иным образом изменить ее, можно также предусмотреть, чтобы несущая плита была проницаемой для технологической среды или имела опирающиеся на дно емкости возвышения для прохождения технологической среды между возвышениями. Технологическая среда может представлять собой, в частности, ингибирующую среду для уменьшения или предотвращения прилипания последнего образованного, т.е. отвердевшего слоя ко дну емкости. Таким образом, когда несущая плита является проницаемой для технологической среды/ингибирующей среды, технологическая среда, соответственно ингибирующая среда может течь из камеры через несущую плиту и предпочтительно проникать через дно емкости к отверждающемуся материалу. Например, несущая плита может содержать нанопористое стекло или аэрогель. Вообще говоря, несущая плита на обращенной ко дну емкости стороне может в дополнение или вместо возвышений иметь текстуры, которые, таким образом, при работе устройства опираются на дно емкости и которые, например, могут быть реализованы также за счет достаточно шероховатой или волнистой поверхности несущей плиты. Возвышения и/или текстурирование предусмотрены для того, чтобы между несущей плитой и дном емкости могла течь технологическая среда (ингибирующая среда).
Если в емкости предусмотрен скребок, перемещаемый по дну емкости, скребок может двигаться по дну емкости в отверждающемся материале. При этом скребок может удалять частично отвердевшие частицы отверждающегося материала и обеспечивать перемешивание отверждающегося материала. В случае отверждающихся материалов, которые из-за содержащихся в них частиц имеют высокую вязкость, скребок может служить для разглаживания отверждаемого слоя.
Далее, предпочтительно, если датчик соединен через обрабатывающий модуль с приводным узлом скребка, и обрабатывающий модуль предназначен, в зависимости от предоставленного датчиком сигнала, для управления приводным узлом скребка. Факультативно датчик может по изменению объема в камере определять важное для работы скребка прижимное усилие, оказываемое скребком на дно емкости. Если прижимное усилие скребка, оказываемое на дно емкости, слишком мало или слишком велико, прижимное усилие, регулируемое обрабатывающим модулем, можно изменить с помощью приводного узла скребка.
Согласно следующему варианту осуществления устройства, можно предусмотреть, чтобы дно емкости представляло собой открывающуюся, в частности, съемную крышку корпуса камеры. Вариант оформления дна емкости как крышки может обеспечить открывающийся доступ в камеру. Если дно емкости образовано как снимающаяся крышка корпуса камеры, то камеру можно закрыть, поместив емкость на остальную часть корпуса камеры. При этом дно емкости в качестве крышки корпуса камеры может включать также по меньшей мере часть боковых стенок корпуса камеры. Альтернативно дно емкости и камера могут быть выполнены как одно целое.
Что касается способа, согласно изобретению предусматривается также, что датчик детектирует изменение объема камеры и выдает сигнал датчика, из которого можно определить знак изменения объема, причем камера ограничена нижней стороной дна емкости, причем объем камеры может изменяться из-за обусловленных процессом отклонений дна емкости от положения покоя. Камера может быть по меньшей мере частично закрытой. В некоторых примерах осуществления камера является по существу герметично закрытой.
Чтобы избежать повторений части описания, относящейся к устройству, при описании способа будут делаться также отсылки на предшествующее описание устройства, если это применимо к способу.
Способ предназначен для послойного формирования тела из радиационно-отверждаемого материала, например, из светоотверждаемой смолы, которая находится в емкости. Емкость является непроницаемой для отверждающегося вещества и имеет дно емкости. Для каждого образующегося, т.е. отверждающегося слоя тела регулируемая по высоте относительно дна емкости рабочая платформа перемещается вертикально над дном емкости на высоту, которая определяется как расстояние между рабочей платформой или последним образованным слоем тела и дном емкости в размере по меньшей мере толщины образующегося слоя тела. При этом последний образованный слой тела, если он уже был сформирован, прилипает к ранее образованным слоям тела на рабочей платформе. Радиационно-отверждаемый материал между рабочей платформой или последним образованным слоем тела и дном емкости селективно отверждается для образования следующего слоя тела путем облучения источником излучения. Источник излучения может представлять собой источник света. Затем регулируемая по высоте рабочая платформа с присоединенным к ней последним образованным или отвердевшим слоем тела отдаляется от положения покоя дна емкости, чтобы создать место для образования следующего слоя между последним отвердевшим слоем тела и дном емкости. В качестве дна емкости предусмотрено по меньшей мере частично гибкое дно, и по меньшей мере один технологический параметр определяется взаимодействующим с дном емкости датчиком. Датчик детектирует изменение объема по меньшей мере частично закрытой камеры и выдает сигнал датчика, из которого можно установить или устанавливается знак изменения объема. Из этого можно установить, увеличивается или уменьшается объем камеры в процессе изготовления создаваемого тела и когда это происходит. Для этого камера ограничена нижней стороной дна емкости. Объем камеры может изменяться или изменяется из-за обусловленного процессом отклонения дна емкости от положения покоя. Так, объем камеры изменяется, когда гибкое дно емкости в ходе процесса отклоняется от своего положения покоя. Определение положения покоя зависит от реализации способа. Положение покоя можно определить как положение дна емкости, в котором отверждающийся материал находится в емкости и давит на дно емкости. Однако положение покоя можно также определить как положение дна емкости, в котором в емкости не содержится никакого отверждающегося вещества.
Согласно одному предпочтительному варианту осуществления способа, можно предусмотреть, чтобы датчик количественно определял измеряемый параметр, напрямую или косвенно пропорциональный объему камеры или изменению объема и выдавал как сигнал датчика. Таким образом, объем или изменение объема камеры определяется путем детектирования измеряемого параметра, прямо или косвенно пропорционального им. Датчик предназначен для определения этого измеряемого параметра и создания сигнала, характеризующего значение измеряемого параметра.
Особенно предпочтительно, если датчик является датчиком давления или датчиком расхода, при этом датчик давления в качестве измеряемого параметра определяет соответствующее изменению объема изменение давления сжимаемой среды в камере, а датчик расхода в качестве измеряемого параметра определяет соответствующее изменению объема изменение количества вещества находящейся в камере текучей среды. Таким образом, давление, изменение давления или изменение количества вещества в камере можно понимать как измеряемый параметр, прямо или косвенно пропорциональный объему камеры или изменению объема камеры. В частности, объем и изменение объема камеры, а также, в случае датчика давления, давление и изменение давления в камере и, в случае датчика расхода, изменение количества вещества в камере, зависят от положения или прогиба дна емкости. Если датчик является датчиком давления, то для определения объема или изменения объема камеры определяется давление или изменение давления в камере, в частности, давление находящейся в камере сжимаемой среды. Для этого камера выполнена закрытой и является по существу непроницаемой для сжимаемой среды. Относительно герметичности камеры следует обратиться к предшествующему описанию устройства. Датчик давления выдает обнаруженное давление или обнаруженное изменение давления в качестве сигнала датчика или выходного сигнала. Датчик давления предпочтительно может определять контрольное значение давления в камере, причем это контрольное значение соответствует положению покоя дна емкости. Контрольное значение сохраняется, например, до тех пор, пока еще не начался процесс отделения отвердевшего слоя от дна емкости. Датчик давления предпочтительно может определять отклонения от контрольного значения, эти отклонения соответствуют отклонениям дна емкости от положения покоя. Если датчик является датчиком расхода, то для определения изменения объема камеры определяется изменение количества вещества в камере, в частности, количества вещества находящейся в камере текучей среды. Что касается конструкции камеры с по меньшей мере одним отверстием, действующим для впуска и/или выпуска текучей среды, и размещением датчика расхода в камере или на ней, также следует обратиться к предшествующему описанию устройства. С помощью датчика расхода можно определить направление потока текучей среды и/или можно определить замеряемые значения потока текучей среды и предоставить их как сигнал датчика или выходной сигнал.
Для упрощения операций, которые необходимо производить оператору для получение трехмерного тела, можно предусмотреть, чтобы предоставленный датчиком сигнал обрабатывался в соединенном с датчиком обрабатывающем модуле, и по меньшей мере один технологический параметр устанавливался в зависимости от сигнала, предоставленного датчиком. При этом в обрабатывающем модуле из предоставленного датчиком сигнала может определяться по меньшей мере один подлежащий регулированию технологический параметр, например, путем сравнения с заданными значениями или путем расчета. Для этого обрабатывающий модуль может содержать микропроцессор или микроконтроллер и может быть связан с запоминающим устройством. Запоминающее устройство может хранить данные и/или программные команды для обработки предоставленного датчиком сигнала.
Особенно целесообразно предусмотреть, чтобы обрабатывающий модуль сравнивал определенный датчиком и предоставленный как сигнал датчика измеряемый параметр с ожидаемым значением и/или сравнивал ход определенных измеряемых параметров (или, в общем случае, нескольких определенных в разные моменты времени измеряемых параметров) с ходом ожидаемых значений (или, в общем случае, нескольких ожидаемых значений) и устанавливал указанный, по меньшей мере один, технологический параметр в зависимости от разницы между измеряемым параметром и ожидаемым значением и/или между ходом измеряемого параметра (нескольких измеряемых параметров) и ходом ожидаемого значения (нескольких ожидаемых значений). Далее, можно предусмотреть, чтобы обрабатывающий модуль сравнивал изменение нескольких измеряемых параметров, определенных в разные моменты времени, с ожидаемым значением изменения и устанавливал по меньшей мере один технологический параметр в зависимости от разницы между изменением и ожидаемым значением изменения. Равным образом, измеряемый параметр может также соответствовать скорости изменения (т.е. изменению в единицу времени) и сравниваться с ожидаемым значением скорости изменения. Ожидаемое значение или ожидаемые значения хранятся в обрабатывающем модуле. В частности, обрабатывающий модуль может сравнивать ход нескольких измеряемых параметров или замеряемых значений, определенных датчиком в нескольких моментах времени и выданных как сигнал датчика, с ходом ожидаемых значений и устанавливать по меньшей мере один технологический параметр в зависимости от разницы между ходом измеряемых параметров или замеряемых значений и ходом ожидаемых значений. Если один измеряемый параметр или замеряемое значение сравнивается с одним ожидаемым значением, установка указанного, по меньшей мере одного, технологического параметра может происходить в зависимости от того, превышает ли или измеряемый параметр ожидаемое значение или не достигает его. Установка по меньшей мере одного технологического параметра может осуществляться также в зависимости от степени превышения или недостижения ожидаемого значения. Если сравнивается несколько измеряемых параметров с несколькими ожидаемыми значениями, регулирование указанного, по меньшей мере одного, технологического параметра может осуществляться в зависимости от относительного изменения измеряемых параметров в сравнении с относительным изменением ожидаемых значений, т.е. независимо от абсолютных измеренных значений.
Можно также предусмотреть, что изменения измеряемого параметра, определенные датчиком и предоставленные как сигнал датчика, обрабатываются в связанном с датчиком обрабатывающем модуле по имитационной модели ожидаемых значений процесса изготовления, и по меньшей мере один технологический параметр устанавливается в зависимости от по меньшей мере одного измеренного датчиком значения измеряемого параметра и/или изменения измеренных значений в соответствии с указания имитационной модели. В этом случае обрабатывающий модуль содержит имитационную модель для расчета ожидаемых значений процесса изготовления. В результате моделирования имитационная модель рассчитывает по меньшей мере одно значение по меньшей мере одного технологического параметра как функцию текущего состояния и в зависимости от входных параметров, таких как по меньшей мере одно значение измеряемого параметра, определенное датчиком и предоставленное как сигнал датчика. В зависимости от результата моделирования, на процесс изготовления можно влиять путем регулирования по меньшей мере одного технологического параметра.
Для еще большего улучшения процесса изготовления предпочтительно, если ожидаемое значение и/или несколько ожидаемых значений рассчитываются обрабатывающим модулем в зависимости от по меньшей мере одного технологического параметра. Таким образом, ожидаемые значения адаптируются к текущей ситуации процесса изготовления, и управление процессом можно осуществлять особенно точно. Указанный по меньшей мере один технологический параметр предпочтительно представляет собой измеряемый параметр, определенный датчиком и выданный как сигнал датчика.
Когда обрабатывающий модуль содержит имитационную модель, предпочтительно, чтобы имитационная модель в качестве входного значения учитывала по меньшей мере один установленный технологический параметр. Благодаря этому имитационная модель дает особенно точные результаты, поскольку ранее установленные технологические параметры или их значения также учитываются при моделировании как входные значения.
Входное значение может указываться пользователем; так, например, это может быть толщина слоя, скорость печати, используемый материал (механические свойства) и т.д., а также комбинации вводных значений. Пользователь может определить соответствующие значения, например, с помощью программного обеспечения CAM (Computer-Aided Manufacturing, автоматизированная система управления технологическим процессом), которое задает заданные значения технологических параметров (управление процессом). Имитационная модель может адаптировать входные значения, если это допускается сигналом датчика.
Далее, можно предусмотреть, чтобы на основе сигнала, предоставленного датчиком, обрабатывающий модуль в качестве технологического параметра определял высоту рабочей платформы и/или последнего отвердевшего слоя тела относительно положения покоя дна емкости, и/или скорость перемещения рабочей платформы, и/или величину площади последнего отвердевшего слоя тела, когда дно емкости из-за движения рабочей платформы отклоняется от положения покоя. Имитационная модель может рассчитать площадь последнего отвердевшего слоя из определяющих тело данных модели и рассчитать ход процесса изготовления в качестве технологического параметра. Таким образом, из сравнения ожидаемого значения или результатов моделирования с измеряемым параметром, определенным датчиком, можно судить об указанной высоте рабочей платформы или последнего отвердевшего слоя тела, скорости перемещения рабочей платформы и/или площади последнего отвердевшего слоя тела. Например, при увеличении высоты рабочей платформы увеличивается объем камеры, если ранее образованные слои тела пристают к рабочей платформе и дну емкости. Кроме того, в этом случае объем камеры изменяется более резко с повышением скорости рабочей платформы. Увеличение площади присоединенного ко дну емкости последнего отвердевшего слоя тела приводит при подъеме рабочей платформы к более резкому изменению объема камеры, чем при меньшей площади присоединенного ко дну емкости последнего отвердевшего слоя тела.
Далее, можно предусмотреть, что в зависимости от сигнала, предоставленного датчиком, обрабатывающий модуль в качестве технологического параметра регулирует высоту рабочей платформы с помощью связанного с ней и с обрабатывающим модулем приводного узла для рабочей платформы, и/или облучение радиационно-отверждаемого материала с помощью связанного с обрабатывающим модулем и источником излучения блока управления источником излучения. Таким образом, сравнивая по меньшей мере одно ожидаемое значение или моделируемое значение измеряемого параметра с по меньшей мере одним значением измеряемого параметра, определенным датчиком, можно в качестве технологического параметра управлять высотой рабочей платформы и/или облучением радиационно-отверждаемого материала. В качестве альтернативы определенным значениям измеряемого параметра обрабатывающий модуль для управления вышеназванными технологическими параметрами может также использовать относительное или абсолютное изменение измеряемого параметра в ходе по меньшей мере одного этапа процесса изготовления.
Согласно следующему варианту осуществления способа, можно предусмотреть, что в зависимости от предоставленного датчиком сигнала обрабатывающий модуль в качестве технологического параметра регулирует давление покоя в камере с помощью по меньшей мере одного связанного с камерой и обрабатывающим модулем регулируемого источника давления, и/или температуру в камере с помощью по меньшей мере одного связанного с камерой и обрабатывающим модулем регулируемого нагревательного устройства, и/или подачу технологической среды в камеру с помощью по меньшей мере одного связанного с камерой и обрабатывающим модулем регулируемого источника технологической среды, и/или воздушный поток в камере с помощью по меньшей мере одного связанного с камерой и обрабатывающим модулем источника воздушного потока. Таким образом, сравнивая по меньшей мере одно ожидаемое значение или моделируемое значение измеряемого параметра с по меньшей мере одним значением измеряемого параметра, можно в качестве технологического параметра установить или регулировать давление покоя в камере, температуру в камере, подачу технологической среды, например, ингибирующей среды, в камеру и/или воздушный поток в камере.
Предпочтительно можно предусмотреть, чтобы из предоставленного датчиком сигнала обрабатывающий модуль в качестве технологического параметра определял отделение от дна емкости последнего отвердевшего и присоединенного ко дну емкости слоя тела, и/или высоту, на которой происходит отделение, и/или скорость отделения от дна емкости последнего отвердевшего и присоединенного к дну емкости слоя тела, и/или касание дна емкости, и/или прижимное усилие, оказываемое на дно емкости движущимся в емкости скребком, и/или ошибочное отделение тела от рабочей платформы, и/или старение емкости, и/или неожиданное прилипание тела ко дну емкости при подаче ингибирующей среды в камеру и к радиационно-отверждаемому материалу, и/или уровень наполнения емкости радиационно-отверждаемым материалом, и/или приведение емкости в состояние готовности, и/или трещину или дыру в дне емкости или в камере. При отделении от дна емкости последнего отвердевшего и присоединенного ко дну емкости слоя тела может быть зарегистрировано резкое уменьшение объема камеры из-за самостоятельного возврата гибкого дна емкости в положение покоя. Кроме того, измеренное изменение объема в камере может быть мерой конца отделения или скорости отделения от дна емкости последнего отвердевшего и присоединенного ко дну емкости слоя тела, когда рабочая платформа поднимается. При соприкосновении с дном емкости, т.е. когда рабочая платформа опускается на дно емкости и входит в контакт с ним, объем камеры уменьшается, как только рабочая платформа смещает дно емкости вниз от положения покоя. Далее, объем камеры уменьшается с увеличением прижимного усилия, оказываемого на дно емкости движущимся в емкости скребком. Тело, ошибочно отделенное от рабочей платформы, которое соединено с рабочей платформой, например, только на одном краю тела, т.е. опрокинуто и свисает, будет при приближении рабочей платформы ко дну емкости касаться дна емкости уже на большей высоте, чем ожидаемая высота рабочей платформы над дном емкости, и объем камеры уменьшится. Кроме того, со временем емкости стареет, и эластичность дна емкости изменяется, что влияет на объем камеры. Неожиданное прилипание тела ко дну емкости при подаче ингибирующей среды в камеру и дальше к радиационно-отверждаемому материалу ведет также при поднятии рабочей платформы к отклонению объема камеры от ожидаемых значений объема. Зная объем камеры, можно также судить об уровне наполнения емкости радиационно-отверждаемым материалом, так как отверждающийся материал давит на дно емкости. Зная объем камеры, можно также установить, была ли емкость предусмотрена в устройстве (или же "камера" открыта в окружающую среду). Кроме того, исходя из неожиданного изменения объема камеры (в частности, неожиданного изменения давления в случае датчика давления и закрытой камеры), можно судить о наличии трещины или дыры в дне емкости или в камере. Таким образом, из измеренного изменения объема камеры, в частности, абсолютных или относительных значений давления, или изменения количества вещества, или скорости изменения давления, или изменение количества вещества обрабатывающий модуль может определить вышеназванные технологические параметры.
Если в зависимости от предоставленного датчиком сигнала для отделения от дна емкости последнего отвердевшего и присоединенного ко дну емкости слоя тела, в частности, во время отдаления регулируемой по высоте рабочей платформы от положения покоя дна емкости, обрабатывающий модуль устанавливает в камере отрицательное давление, отклоняющее дно емкости от рабочей платформы, при этом последний отвердевший и присоединенный ко дну емкости слой тела может отделиться от дна емкости уже на более низком уровне строительной платформы или без подъема рабочей платформы над дном емкости. Отрицательное давление, которое возникает при уменьшении объема камеры и, таким образом, дополнительно к любой возвращающей силе дна емкости отодвигает дно емкости от рабочей платформы, поддерживает тем самым отделение присоединенного слоя тела от дна емкости. Значение отрицательного давления предпочтительно регистрируется датчиком (в частности, датчиком давления) и при необходимости может быть ограничено, чтобы не допустить повреждения изготавливаемого тела или дна емкости из-за слишком большого отрицательного давления или чтобы не допустить слишком резкого изменения давления в камере.
Если в зависимости от предоставленного датчиком сигнала обрабатывающий модуль устанавливает в камере избыточное давление ингибирующей среды, может повыситься диффузия через полупроницаемую пленку. Это влияет на толщину слоя ингибирующего вещества, что является важным технологическим параметром и влияет, например, на скорость печати.
Если, предпочтительно в зависимости предоставленного датчиком сигнала, перед касанием дна емкости рабочей платформой или последним отвердевшим слоем тела, обрабатывающим модулем устанавливается избыточное давление в камере, отклоняющее дно емкости к рабочей платформе, изменение давления в камере регистрируется еще до достижения положения покоя дна емкости, и положения покоя дна емкости можно особенно точно достичь путем опускания рабочей платформы. Значение избыточного давления предпочтительно регистрируется датчиком (в частности, датчиком давления), и регулируется на основании этого блоком управления, чтобы не допустить повреждения дна емкости из-за слишком большого избыточного давления в камере.
Для получения слоя создаваемого тела можно предусмотреть, чтобы регулируемая по высоте рабочая платформа с присоединенным к ней и ко дну емкости последним отвердевшим слоем тела отодвигалась от положения покоя дна емкости, при этом отделение последнего отвердевшего и присоединенного ко дну емкости слоя тела устанавливается обрабатывающим модулем с помощью датчика, регулируемая по высоте рабочая платформа перемещается вертикально над положением покоя дна емкости на высоту, которая определяется как расстояние между последним отвердевшим слоем тела и положением покоя дна емкости в размере по меньшей мере толщины нового образуемого слоя тела, и затем радиационно-отверждаемый материал селективно отверждается путем облучения источником излучения для образования нового слоя тела. Таким образом, в этом случае присоединенный ко дну емкости последний отвердевший слой тела отделяется от дна емкости, например, путем подъема рабочей платформы. Изменение объема камеры при поднятии рабочей платформы и отделении последнего отвердевшего слоя тела от дна емкости предпочтительно регистрируется датчиком. Как только разделение будет обнаружено, рабочую платформу можно опустить на желаемую высоту над дном емкости, для чего рабочая платформа приводится в движение, например, шаговым двигателем. Затем отверждающийся материал затвердевает путем облучения в пространстве между последним затвердевшим слоем тела и дном емкости, образуя новый слой тела. При этом экспонирование отверждающегося материала происходит отдельно от движения рабочей площадки (асинхронный режим без ингибирующего слоя).
Для получения слоя создаваемого тела можно также предусмотреть подачу ингибирующей среды через камеру к радиационно-отверждаемому материалу и перемещение регулируемой по высоте рабочей платформы с присоединенным к ней последним отвердевшим слоем тела вертикально над положением покоя дна емкости на высоту, которая определяется как расстояние между последним отвердевшим слоем тела и положением покоя дна емкости в размере по меньшей мере толщины нового образуемого слоя тела, и одновременно радиационно-отверждаемый материал селективно отверждается путем облучения источником излучения для образования нового слоя тела. В этом случае ингибирующая среда предотвращает прилипание последнего отвердевшего слоя тела ко дну емкости, благодаря чему никакой операции отделения этого слоя от дна емкости не требуется. Объем, занимаемый ингибирующей средой, учитывается при определении высоты, на какую перемещается рабочая платформа над дном емкости. Таким образом, отверждающийся материал облучается уже во время перемещения рабочей платформы на желаемую высоту над дном емкости. В результате процесс изготовления тела существенно ускоряется. Таким образом, экспонирование отверждающегося материала и движение рабочей платформы происходят одновременно (синхронный режим).
Для получения слоя создаваемого тела можно также предусмотреть подачу ингибирующей среды через камеру к радиационно-отверждаемому материалу и перемещение регулируемой по высоте рабочей платформы с присоединенным к ней последним отвердевшим слоем тела вертикально над положением покоя дна емкости на высоту, которая определяется как расстояние между последним отвердевшим слоем тела и положением покоя дна емкости в размере по меньшей мере толщины нового образуемого слоя тела, и затем радиационно-отверждаемый материал селективно отверждается путем облучения источником излучения для образования нового слоя тела. В этом случае ингибирующая среда предотвращает прилипание последнего отвердевшего слоя тела ко дну емкости, благодаря чему никакой операции отделения этого слоя от дна емкости не требуется. Объем, занимаемый ингибирующей средой, учитывается при определении высоты, на какую перемещается рабочая платформа над дном емкости. Рабочую платформу можно переместить на желаемую высоту над дном емкости и затем облучать отверждающийся материал между последним отвердевшим слоем тела и дном емкости. Поскольку операция отделения не требуется, процесс получения тела существенно ускоряется. Таким образом, экспонирование отверждаемого вещества происходит отдельно от движения рабочей платформы (асинхронный режим с ингибирующим слоем).
Далее изобретение поясняется подробнее на предпочтительных, но не ограничивающих примерах осуществления с обращением к чертежам. На чертежах:
фиг. 1: устройство согласно изобретению с датчиком давления и дном емкости без несущей плиты;
фиг. 2: устройство согласно изобретению с датчиком давления и дном емкости с несущей плитой;
фиг. 3: несущая плита с опирающимися на дно емкости возвышениями;
фиг. 4: устройство с фиг. 1 с присоединенным ко дну емкости по меньшей мере частично сформированным телом;
фиг. 5: устройство с фиг. 2 с присоединенным ко дну емкости по меньшей мере частично сформированным телом;
фиг. 6a-6d: устройство с фиг. 2 соответственно с регулируемым источником давления, регулируемым нагревательным устройством, регулируемым источником технологической среды (источник ингибитора) и источником воздушного потока;
фиг. 7: устройство с фиг. 1 с ингибирующим слоем;
фиг. 8: устройство с фиг. 2 с ингибирующим слоем;
фиг. 9: устройство с фиг. 7 с частично израсходованным ингибирующим слоем;
фиг. 10: устройство с фиг. 9 с еще больше израсходованным ингибирующим слоем;
фиг. 11: устройство с фиг. 8 с частично израсходованным ингибирующим слоем;
фиг. 12: устройство согласно изобретению, у которого дно емкости представляет собой открывающуюся, в частности, съемную крышку корпуса камеры;
фиг. 13: устройство с фиг. 1 со скребком на дне емкости;
фиг. 14: устройство с фиг. 1 с рабочей платформой, касающейся дна емкости;
фиг. 15: устройство с фиг. 1 с отрицательным давлением в камере, отклоняющим дно емкости от рабочей платформы;
фиг. 16: устройство с фиг. 2 с избыточным давлением в камере, отклоняющим дно емкости к рабочей платформе;
фиг. 17: устройство с фиг. 1 с телом, ошибочно частично отделенным от рабочей платформы;
фиг. 18a-18c: процесс отделения от дна емкости последнего отвердевшего слоя тела в трех типичных состояниях;
фиг. 19: график типичного изменения объема камеры, давления в камере и высоты рабочей платформы над дном емкости для процесса отделения, показанного на фиг. 18a-18c, в случае по существу закрытой камеры;
фиг. 20a и 20b: процесс отделения от дна емкости последнего отвердевшего слой одного из трех тел для двух типичных состояний;
фиг. 21: график типичного хода изменения давления в по существу закрытой камере и высоты рабочей платформы над дном емкости для процесса отделения, показанного на фиг. 20a и 20b;
фиг. 22: тело, присоединенное ко дну емкости;
фиг. 23a-23c: график типичной зависимости высоты рабочей платформы над дном емкости от времени экспонирования; и
фиг. 24: устройство согласно изобретению с датчиком расхода вместо датчика давления.
На показанных фигурах для наглядности части устройства, которые не используются для описания соответствующей фигуры, опущены.
Те части описания, которые относятся к измерению давления или определению давления в камере, следует понимать, исходя из предположения, что датчик является датчиком давления, а камера по существу закрыта. Для объяснения относительно герметичности по существу закрытой камеры следует обратиться к описанному выше.
Для наглядности большинство примеров осуществления проиллюстрировано и описано для случая с по существу закрытой камерой и с датчиком давления. Если вместо измерения давления предполагается и возможно измерение расхода количества вещества, можно, разумеется, вместо датчика давления использовать датчик расхода, который устанавливается на впуске/выпуске текучей среды в камеру, соответственно из камеры. Таким образом, примеры осуществления, которые показаны и описаны в связи с датчиком давления, но могут быть также реализованы с датчиком расхода, справедливы также для вариантов осуществления с датчиком расхода.
Фиг. 1 показывает устройство 1 для установки послойного формирования тела K, которое показано, например, на фиг. 4, из радиационно-отверждаемого материала S, устройство содержит емкость 3 с дном 2 емкости для вмещения радиационно-отверждаемого материала S. Дно 2 емкости показано в его положении покоя по существу плоским. Устройство 1 содержит также находящуюся выше дна 2 емкости и регулируемую по высоте относительно дна 2 емкости рабочую платформу 4, а также взаимодействующий с дном 2 емкости датчик 5. Регулируемая по высоте рабочая платформа 4 может смещаться по высоте в направлении, указанном двойной стрелкой H, т.е. может смещаться вверх и вниз относительно дна емкости или, в более общем смысле, относительно емкости 3. Дно 2 емкости по меньшей мере частично, в зоне 13, является гибким. Под емкостью 3 предусмотрена камера 6, которая на фиг. 1 показана закрытой, чтобы взаимодействовать с датчиком 5, выполненным как датчик давления 5a. В другом варианте осуществления, показанном на фиг. 24, камера 6 может иметь отверстие 34 для впуска или выпуска находящейся в камере 6 текучей среды, при этом датчик 5 является датчиком расхода 5b. Камера 6 ограничена нижней стороной дна 2 емкости. Таким образом, дно 2 емкости является частью корпуса 7 камеры 6. Датчик 5 может обнаруживать изменение объема камеры 6 и выдавать сигнал датчика, из которого можно установить знак изменения объема. Датчик 5 может, в частности, количественно определять измеряемый параметр, прямо или косвенно пропорциональный объему камеры или изменению объема камеры, и выдавать в качестве сигнала датчика. В примере, показанном на фиг. 1, датчик 5 является датчиком давления 5a для определения давления или соответствующего изменению объема изменения давления находящейся в камере 6 сжимаемой среды M. При этом камера 6 выполнена закрытой. В другом варианте осуществления (фиг. 24) датчик 5 может быть датчиком расхода 5b, который предусмотрен для определения соответствующего изменению объема изменения количества вещества содержащейся в камере 6 текучей среды. Текучая среда может представлять собой жидкость или газ и, соответственно, быть сжимаемой или несжимаемой. Например, датчик 5 предназначен выдавать в качестве измеряемого параметра определенное им давление, определенное изменение давления или определенное изменение количества вещества и предоставлять сигнал датчика.
В примере, показанном на фиг. 1, в камере 6 находится сжимаемая среда M, например, воздух, причем датчик 5 является датчиком давления 5a, предназначенным для определения давления находящейся в камере 6 сжимаемой среды M. Датчик давления 5a предпочтительно размещен в камере 6. В одном частном варианте осуществления датчик давления 5a может быть также выполнен как акустический преобразователь. Датчик 5 может быть соединен с обрабатывающим модулем 8, который предназначен для обработки сигнала, предоставленного датчиком 5, в частности, давление, определенное датчиком давления 5a, или изменение количества вещества, определенное датчиком расхода 5b. Датчик 5 может быть подключен через обрабатывающий модуль 8 к приводному узлу 9 для регулируемой по высоте рабочей платформы 4 и/или к блоку 10 управления источником 11 излучения, который предусмотрен для облучения радиационно-отверждаемого материала S. Обрабатывающий модуль 8 предназначен для управления приводным узлом 9 для регулируемой по высоте рабочей платформы 4 и/или блоком 10 управления источником 11 излучения в зависимости от сигнала, предоставленного датчиком 5. В других, не показанных примерах осуществления обрабатывающий модуль 8 может также быть соединен только с приводным узлом 9 для регулируемой по высоте рабочей платформы 4 или только с блоком 10 управления источником 11 излучения и предназначен для управления ими. Усилие разделения, необходимое для отделения тела K от дна 2 емкости, оказываемое регулируемой по высоте рабочей платформой 4, изгибает дно 2 емкости и приводит тем самым к изменению объема камеры 6. Когда камера 6 закрыта для использования с датчиком давления 5a, изменение объема вызывает изменение давления в камере 6. Если, напротив, камера 6 частично открыта для использования с датчиком расхода 5b, изменение объема вызывает течение (втекание или вытекание) находящейся в камере 6 текучей среды для выравнивания давления с давлением окружающей среды или другой камеры. При повышении энергии излучения (произведение времени экспонирования и интенсивности экспонирования), вносимой источником 11 излучения, образованный слой тела K сильнее пристает к дну 2 емкости. Сравнивая ожидаемое минимальное давление (= давление отделения) или поток с фактическим давлением отделения или фактическим потоком, можно сделать вывод о слишком высокой энергии экспонирования. Приводной узел 9 может представлять собой, например, управляемый электродвигатель, в частности, шаговый двигатель, который входит в зацепление с регулируемой по высоте штангой 12 и через штангу 12 соединен с рабочей платформой 4. Дно 2 емкости является по меньшей мере частично проницаемым для излучения, т.е. по меньшей мере частично проницаемым для излучения, испускаемого источником 11 излучения на дно 2 емкости, например, для света. Дно 2 емкости предпочтительно содержит гибкую натянутую пленку 13a. Пленка 13a предусмотрена в гибкой зоне 13. Более предпочтительно, пленка 13a является по меньшей мере частично проницаемой для излучения, в частности, светопроницаемой. В примере, показанном на фиг. 1, пленка 13a натянута между твердыми краевыми зонами 14 дна 2 емкости. Когда, как в примере, показанном на фиг. 1, источник 11 излучения находится снаружи, в частности, под камерой 6, целесообразно, чтобы дно 7a корпуса 7 камеры было по меньшей мере частично проницаемым для излучения, в частности, светопроницаемым. Типичный конус излучения B можно видеть на фиг. 1.
Фиг. 2 показывает устройство 1, в котором по меньшей мере часть дна 2 емкости, в частности, гибкая часть 13, особенно предпочтительно пленка 13a, опирается на несущую плиту 15, по меньшей мере частично проницаемую для излучения, в частности, прозрачную. Таким образом, несущая плита 15 поддерживает в показанном положении покоя нижнюю сторону пленки 13a. Пленка 13a или дно 2 емкости в этом положении покоя показаны по существу плоскими. Несущая плита 15 может быть выполнена проницаемой для технологической среды Mp, в частности, ингибирующей среды Mi, и/или может иметь опирающиеся на дно 2 емкости возвышения 16 для пропускания технологической среды Mp, в частности, ингибирующей среды Mi, между возвышениями 16. Возвышения 16, опирающиеся на дно 2 емкости, могут опираться, частности, на гибкую часть 13 дна 2 емкости, предпочтительно на пленку 13a. В камере 6 находится технологическая среда Mp или ингибирующая среда Mi, например, кислород.
Если закрытая конструкция емкости допускает отрицательное изменение объема камеры 6, например, вследствие небольшого провисания емкости 3, точнее, дна 2 емкости, можно обнаружить повышение давления. Из этого можно сделать вывод, например, об уровне заполнения отверждаемого, например, светочувствительного вещества S в емкости 3. Кроме того, можно определить нулевое положение дна 2 емкости относительно несущей плиты 15, поскольку целенаправленное столкновение несущей плиты 15 с гибким дном 2 емкости после его отделения от тела K приведет к градиенту давления, который можно измерить.
На фиг. 3 показан участок несущей плиты 15 с возвышениями 16, которые опираются на дно 2 емкости. Между возвышениями 16 проходят вырезы 17, в которых может течь технологическая среда Mp, например, ингибирующая среда Mi. Вырезы 17 могут быть выполнены, например, как желобчатые углубления между возвышениями 16 в форме реек. Если, кроме того, несущая плита 15 является проницаемой для технологической среды Mp, в частности, ингибирующей среды Mi, в несущей плите 15 можно предусмотреть каналы (не показаны) для проведения технологической среды Mp, в частности, ингибирующей среды Mi. Несущая плита 15 может быть также выполнена пористой.
На фиг. 4 устройство 1 показано с по меньшей мере частично образованным телом K. Тело K содержит несколько слоев K1, …, Kn, которые были образованы в результате локального отверждения отверждающегося материала S посредством излучения. Тело K удерживается первым образованным слоем K1 на рабочей платформе 4 и (в показанной ситуации перед отделением) пристало последним образованным слоем Kn ко дну 2 емкости, в частности, к пленке 13a. В показанном состоянии рабочая платформа 4 уже немного переместилась вверх, т.е. в положительном направлении оси z и от емкости 3, в результате чего пленка 13a по меньшей мере на части площади отклонилась от своего положения покоя. Из-за отклонения объем камеры 6 увеличивается. Это соответствует положительному знаку ("+") изменения объема. Следовательно, давление в камере 6 снижается (при постоянной температуре и постоянном количестве вещества, т.е. при закрытой камере). Датчик давления 5a предназначен для обнаружения этого изменения давления и передачи соответствующего сигнала на обрабатывающий модуль 8. Аналогично, датчик расхода 5b (на фиг. 4 не показано), взаимодействующий с частично открытой камерой 6, может обнаруживать изменение количества вещества в камере 6, причем изменение количества вещества соответствует увеличению объема камеры 6. В частности, в случае открытой камеры 6 из-за прогиба пленки 13a в камеру засасывается текучая среда. Датчик расхода 5b может также передавать соответствующий сигнал на обрабатывающий модуль 8. Для наглядности на фиг. 4, а также на следующих фигурах обрабатывающий модуль 8, приводной узел 9 и блок 10 управления не показаны.
В отличие от фиг. 4, на фиг. 5 предусмотрена несущая плита 15, на которую может опираться дно 2 емкости, в частности, пленка 13a. Как можно видеть из показанной ситуации с отклоненным дном 2 емкости, дно 2 емкости, точнее, пленка 13a, неплотно прилегает к несущей плите 15 и может под действием присоединенного тела K приподниматься от нее. Углубления 17 в несущей плите 15 обеспечивают выравнивание давления внутри камеры 6, т.е. между объемом, заключенным между несущей плитой 15 и пленкой 13a, с одной стороны, и камерой 6 под несущей плитой 15, с другой стороны. Таким образом, прогиб дна 2 емкости приводит к обнаруживаемому датчиком давления 5a изменению давления или обнаруживаемому датчиком расхода 5b изменению количества вещества. На фиг. 5 можно также вместо датчика давления 5a в закрытой камере 6 предусмотреть датчик расхода 5b в частично открытой камере 6 (на фиг. 5 не показана).
Фиг. 6a показывает в упрощении устройство 1, у которого камера 6, как закрытая камера 6, соединена, например, с по меньшей мере одним регулируемым источником 18 давления для установки давления покоя в камере 6, и датчик давления 5a через обрабатывающий модуль 8 подключен к регулируемому источнику 18 давления.
Фиг. 6b показывает в упрощении устройство 1, у которого камера 6 соединена, например, с регулируемым нагревательным устройством 19 (или, в более широком смысле, с теплообменником) для регулирования температуры в камере 6, а датчик давления 5a через обрабатывающий модуль 8 подключен к регулируемому нагревательному устройству 19. В этом примере камера 6 имеет впуск 27 и выпуск 28. Впуск 27 и выпуск 28 могут закрываться, каждый, клапаном 29, 30, в частности, электромагнитным клапаном. Нагревательное устройство 19 расположено в линии подачи 31 между компрессором 32 и клапаном 29 перед впуском 27. Для изменения температуры в камере 6 может быть задействован компрессор 32, по меньшей мере временно, чтобы, например, всасывать окружающий воздух через насадку 33. Одновременно клапаны 29, 30 открываются почти в одинаковой степени, чтобы через выпуск 28 из камеры 6 могла выходить сжимаемая среда и заменяться втекающей через впуск 27 сжимаемой средой, причем притекающая среда непосредственно перед этим была нагрета в нагревательном устройстве 19. Благодаря перемешиванию сжимаемой среды за счет течения в камере 6 быстро устанавливается однородная температура. При этом может быть предпочтительным предусмотреть в камере 6 устройство измерения температуры, которое при необходимости подключено к обрабатывающему модулю 8. Таким образом, нагревательное устройство 19 служит, например, для непрямого нагревания отверждающегося материала S. Как только будет достигнута желаемая температура, клапаны 29, 30 снова закрываются. При оценке изменения давления, детектируемого датчиком 5a давления, учитывается состояние клапанов 29, 30 (т.е. закрыты, или открыты, или частично открыты), чтобы можно было правильно определить причину изменений давления.
Фиг. 6c показывает в упрощении устройство 1, у которого камера 6 соединена, например, с регулируемым источником 20 технологической среды, в частности, источником 20a ингибитора, для регулируемой подачи технологической среды Mp, в частности, ингибирующей среды Mi, в камеру 6, и датчик давления 5a через обрабатывающий модуль 8 подключен к регулируемому источнику 20 технологической среды, в частности, источнику 20a ингибитора. Источник 20 технологической среды служит для по меньшей мере локального управления процессом отверждения радиационно-отверждаемого материала S в емкости 3. Так как в этом случае дно 2 емкости может быть по меньшей мере чуть проницаемым для технологической среды Mp, в этом варианте можно обойтись всего одним впуском и без выпуска. Если датчик 5 выполнен как датчик расхода 5b, он может быть установлен в соединительной линии между источником 20 технологической среды и камерой 6. В этом случае вывод об изменении объема можно сделать, исходя из баланса массы; изменение пропорционально разности между втекающей и вытекающей средой.
Фиг. 6d показывает в упрощении устройство 1, у которого камера 6 соединена, например, с источником 21 воздушного потока для создания воздушного потока в камере 6, и датчик давления 5a через обрабатывающий модуль 8 подключен к источнику 21 воздушного потока. Источник 21 воздушного потока служит, например, для перемешивания находящейся в камере 6 сжимаемой среды M. Как и на фиг. 6c, в качестве датчика 5 может использоваться также датчик расхода 5b, устанавливаемый на соединительной линии между источником 21 воздушного потока и камерой 6.
Разумеется, камера 6 устройства 1 может быть соединена с несколькими элементами, выбранными из регулируемого источника 18 давления, регулируемого нагревательного устройства 19, регулируемого источника 20 технологической среды и источника 21 воздушного потока. Обрабатывающий модуль 8 предпочтительно предназначен для управлять источником 18 давления, и/или нагревательным устройством 19, и/или источником 20 технологической среды, и/или источником 21 воздушного потока в зависимости от сигнала датчика, предоставленного датчиком 5. Кроме того, обрабатывающий модуль 8 предпочтительно может быть предназначен для управления одним или несколькими элементами группы, состоящей из впускного клапана 29, выпускного клапана 30 и компрессора 32.
На фиг. 7 показано устройство 1 с ингибирующим слоем I, образованным ингибирующей средой Mi. Ингибирующий слой I в показанном примере образован между дном 2 емкости и отверждающимся материалом S. Для этого ингибирующая среда Mi вводится в камеру 6 через впуск, на фиг.7 не показанный. Для того, чтобы можно было подавать ингибирующую среду Mi к отверждаемому материалу S, дно 2 емкости, в частности пленка 13a, предпочтительно является полупроницаемой и проницаемой для ингибирующей среды Mi или вообще для технологической среды Mp. Ингибирующая среда Mi или образованный в результате ингибирующий слой I снижает силу сцепления, с которой последний образованный слой Kn тела K прилипает к дну 2 емкости, в частности к пленке 13a. Ингибирующая среда Mi или ингибирующий слой I предпочтительно предотвращают такое прилипание. Пример, показанный на фиг. 7, может также быть реализован с датчиком расхода 5b в частично открытой камере 6 вместо датчика давления 5a в закрытой камере 6. При этом разность потоков втекающей и вытекающей среды соответствует изменению объема.
Регулирование температуры в камере 6 служит, например, для ускорения процесса диффузии ингибирующей среды Mi через полупроницаемый слой (пленка 13a), а также для нагрева отверждающегося материала S в емкости 3. Температура в камере 6 влияет на температуру материала S и, следовательно, на вязкость и способность отверждающегося материала S реагировать с излучением.
В отличие от фиг. 7, на фиг. 8 предусмотрена несущая плита 15, на которую может опираться дно 2 емкости, в частности, пленка 13a. При этом целесообразно, чтобы несущая плита 15 была проницаемой для ингибирующей среды Mi или вообще для технологической среды Mp, и/или имела опирающиеся на дно 2 емкости возвышения 16 для прохода ингибирующей среды Mi или технологической среды Mp между возвышениями 16.
На фиг. 9 показано устройство 1, у которого ингибирующий слой I под телом K частично израсходован. На это указывает выпуклость пленки 13a и, тем самым, образование более тонкого ингибирующего слоя I под телом K.
В примере, показанном на фиг. 10, ингибирующий слой I под телом K израсходован полностью, поэтому последний образованный слой Kn тела K нежелательным образом прилипает ко дну 2 емкости, в частности, к пленке 13a.
Ситуации, показанные на фиг. 9 и фиг. 10, можно различить по разным прогибам пленки 13a и следующим из этого разным изменениям объема, на основе изменения объема, обнаруженного датчиком 5. Если датчик 5 представляет собой датчик давления 5a, взаимодействующий с закрытой камерой 6, различные изменения давления в камере 6 можно различить на основе изменения давления, обнаруживаемого датчиком давления 5a. Таким образом, обрабатывающий модуль 8 может, например, сигнализировать о недостатке ингибирующей среды Mi или может, предпочтительно независимо, обеспечивать своевременную дополнительную подачу или распределение ингибирующей среды Mi в камеру 6, например, путем управления соответствующим источником 20 ингибитора.
В отличие от фиг. 9, на фиг. 11 предусмотрена несущая плита 15, на которую может описаться дно 2 емкости, в частности, пленка 13a. С точки зрения распределения ингибирующей среды Mi наличие возвышений 16 и углублений 17 в несущей плите 15 ничего не меняет в отношении основного принципа действия, описанного выше.
На фиг. 12 устройство 1 показано в варианте осуществления, в котором дно 2 емкости представляет собой открывающуюся, в частности, съемную крышку 22 корпуса 7 камеры 6. В этом варианте камера 6 закрывается только при введении емкости 3 в установку. При этом корпус 7 камеры состоит из дна 7a камеры, боковых частей 7b и верхней части 7c камеры. Дно 2 емкости как крышка 22 корпуса 7 камеры может, как показано в примере на фиг. 12, образовывать верхнюю часть 7c камеры и боковые части 7b. Таким образом, крышка 22 накладывается на дно 7a камеры, которое образовано опорной поверхностью установки. Опорная поверхность, образующая дно 7а камеры, здесь одновременно является частью корпуса производственного станка. В другом варианте осуществления крышка 22 может образовывать только верхнюю часть 7c камеры и насаживается на боковые части 7b и дно 7a камеры. Как альтернатива закрытой камеры 6, показанной для примера на фиг. 12, камера 6 может быть выполнена частично открытой, чтобы взаимодействовать с датчиком расхода 5b.
На фиг. 13 показано устройство 1 со скребком 23, перемещаемым в емкости 3 по дну 2 емкости, в частности, по пленке 13a. Датчик 5, т.е. датчик давления 5a или датчик расхода 5b, предпочтительно соединен через обрабатывающий модуль 8 с приводным узлом 24 скребка 23. В примере, представленном на фиг. 13, приводной узел 24 скребка 23 содержит находящуюся в емкости 3 подвижную штангу 25, которая приводится в движение двигателем 26, управляемым обрабатывающим модулем 8. Обрабатывающий модуль 8 предназначен для управления приводным узлом 24 (двигателем 26) скребка 23, например, в зависимости от сигнала, полученного от датчика 5, т.е. в зависимости от определенного датчиком давления 5a давления в камере 6 или от определенного датчиком расхода 5b изменения количества вещества в камере 6.
На фиг. 14 устройство 1 показано в состоянии, в котором опустившаяся в отрицательном направлении по оси Z рабочая платформа 4 касается дна 2 емкости, в частности, пленки 13a. Под касанием понимается контакт дна 2 емкости или пленки 13a с рабочей платформой 4 или последним отвердевшим слоем Kn тела K без какого-либо или с минимальным прогибом дна 2 емкости или пленки 13a. Любое дальнейшее опускание рабочей платформы 4 привело бы к измеримому датчиком 5 (датчиком давления 5a или датчиком расхода 5b) изменению объема камеры 6 (т.е. уменьшению объема и соответствующему повышению давления при закрытой камере 6 или к соответствующему уменьшению количества текучей среды в частично открытой камере 6).
На фиг. 15 устройство 1 показано в состоянии, в котором для отделения от дна 2 емкости последнего отвердевшего и присоединенного ко дну 2 емкости слоя Kn тела K, в частности, во время отдаления регулируемой по высоте рабочей платформы 4 от положения покоя дна 2 емкости, обрабатывающий модуль 8 устанавливает в камере 6 отрицательное давление, отклоняющее дно 2 емкости от рабочей платформы 4. В примере, показанном на фиг. 15, рабочая платформа 4 уже немного переместилась вверх в положительном направлении оси z. Установка отрицательного давления в камере 6 происходит в зависимости от давления в камере 6, определенного датчиком 5, в частности, датчиком давления 5a. Для этого датчик давления 5a соединен через обрабатывающий модуль 8 с подключенным к камере 6 компрессором 32. Компрессор 32 предпочтительно может работать в обоих направлениях, т.е. для создания избыточного давления или отрицательного давления в камере 6, как только клапан 29 открывается перед впуском 27. Отрицательное давление обозначено на фиг. 15 направленными вертикально вниз стрелками. Для создания отрицательного давления в камере 6 она является закрытой или по меньшей мере выполнена с возможностью закрывания.
На фиг. 16 устройство 1 показано в состоянии, в котором перед касанием рабочей платформой 4 или последним отвердевшим слоем Kn тела K дна 2 емкости, в камере 5 обрабатывающим модулем 8 устанавливается избыточное давление, отклоняющее дно 2 емкости к рабочей платформе 4. В примере, представленном на на фиг. 16, рабочая платформа 4 уже немного сдвинулась вниз, в отрицательном направлении оси Z, чтобы прийти в контакт с дном 2 емкости. Избыточное давление в камере 6 устанавливается в зависимости от давления в камере 6, определенного датчиком 5, в частности, датчиком давления 5a. Для этого датчик давления 5a через обрабатывающий модуль 8 соединен с компрессором 32, подключенным к камере 6. Избыточное давление приводит к выгибанию пленки 13a вверх. Таким образом, касание может применяться также при использовании несущей плиты 15, чтобы посредством датчика давления 5a детектировать момент касания через внезапное увеличение давления. Для создания избыточного давления в камере 6 она является закрытой или по меньшей мере выполнена с возможностью закрывания.
К началу изготовления тела K рабочая платформа 4 опущена настолько, что она находится над дном 2 емкости в пределах толщины одного слоя (предпочтительно 10-300 мкм). Последующее экспонирование первого создаваемого слоя K1 тела K чаще всего реализуется с повышенным внесением энергии, чтобы обеспечить надежную адгезию слоя K1 с рабочей платформой 4. Например, из-за точности позиционирования по высоте рабочей платформы 4, старения емкости и из-за различий в производстве емкостей расстояние между рабочей платформой 4 и дном 2 емкости может колебаться, так что адгезия первого слоя K1 может быть гарантирована не всегда. Таким образом, показанный на фиг. 16 активный контакт дна 2 емкости с рабочей платформой 4 является целесообразным и предотвращает вышеуказанные проблемы. Для этого давление в камере 6 повышают с помощью компрессора 32 или источника 18 давления (смотри фиг. 6a), так что образуется небольшая выпуклая кривизна дна 2 емкости, как показано на фиг. 16. Затем рабочая платформа 4 перемещается в направлении дна 2 емкости, т.е. вниз. Когда рабочая платформа 4 касается изогнутого дна 2 емкости, давление в камере 6 продолжает расти. Рабочая платформа 4 может перемещаться дальше в направлении дна 2 емкости, пока давление не перестанет изменяться, после чего дно 2 емкости упрется в несущую плиту 15 и будет прижато к нему плоским. Дальнейшее перемещение в отрицательном направлении по оси Z ведет, например, к потере шага в шаговом двигателе или к повреждению емкости 3.
На фиг. 17 показана ошибочная ситуация, при которой тело K частично отделилось нежелательным образом от рабочей платформы 4. Такую неисправность можно обнаружить с помощью датчика 5 (датчик давления 5a или датчик потока 5b), поскольку дальнейшее движение рабочей платформы 4 вниз в отрицательном направлении оси Z приводит преждевременному уменьшению объема (увеличению давления или уменьшению количества вещества) в камере 6. Преждевременность уменьшения объема может быть определена и распознана из ожидаемой высоты тела K на основе уже созданных слоев K1-Kn и записанного шаговым двигателем пути рабочей платформы 4 в сравнении с моментом уменьшения объема, обнаруженным датчиком 5.
На фигурах 18a-18c показано, как выпуклое дно 2 емкости отделяется от последнего отвердевшего слоя Kn тела K, при этом высота рабочей платформы 4 изменяется (Z1<Z2<Z3). На фиг. 18a рабочая платформа 4 уже немного переместилась в положительном направлении оси z. На фиг. 18b рабочая платформа 4 переместилась еще дальше в положительном направлении оси z, и уже произошло частичное отделение. На фиг. 18c рабочая платформа 4 еще чуть дальше отодвинулась в положительном направлении оси z, и дно 2 емкости в этот момент времени полностью отделилось от тела K и вернулось в свое положение покоя. В результате объем камеры 6 уменьшился, что соответствует отрицательному знаку ("-") изменения объема.
Фиг. 19 показывает изменение во времени объема камеры 6, знака изменения объема, изменение давления в камере 6 вследствие изменения объема в случае закрытой камеры, и положение Z или высоту рабочей платформы 4 относительно положения покоя дна 2 емкости, во время отслеживаемого датчиком 5, в частности, датчиком давления 5a, формирования слоя. Сначала отверждаемое, например, светоотверждаемое вещество S отверждается с желаемой формой поперечного сечения, чтобы образовать слой Kn. Затем отвердевший слой Kn, который образован между дном 2 емкости и ранее образованным слоем Kn-1, должен быть отделен от дна 2 емкости. Начиная с момента tstart рабочая платформа 4 перемещается на расстояние  в положительном направлении оси z. Благодаря гибкой конструкции дна 2 емкости оно деформируется с вогнутой кривизной в направлении оси Z, и объем камеры 6 увеличивается по сравнению с нормальным объемом Vnorm (см. ниже фиг. 18a). Положительное изменение объема (знак "+" или "1") имеет следствием пропорциональное снижение давления относительно pnorm, что регистрируется датчиком давления 5a. В зависимости от формы сечения, толщины слоя, материала и многих других факторов образованный слой Kn отстает от дна 2 емкости, как только будет достигнута высота zsep (к моменту tsep) (см. фиг. 18c). Изогнутое дно 2 емкости резко возвращается в свою плоскую исходную форму (положение покоя). В зависимости от конструкции и материала дна 2 емкости могут возникать затухающие колебания. Переход дна 2 емкости в положение покоя приводит к быстрому отрицательному изменению объема (знак "-" или "-1"), что приводит к Vnorm и, тем самым, к измеримому изменению давления от psep до pnorm. Таким образом, момент отрыва или отделения tsep можно распознать, например, по изменению знака изменения объема с "1" на "-1" в процессе разделения (знак изменения объема факультативно можно определить как знак, противоположный знаку изменения давления). В результате процесс отделения, т.е. подъем рабочей платформы 4, заканчивается, и рабочая платформа перемещается с zsep на zx+1 (опускается). В момент tdisp происходит вытеснение материала, из-за чего дно 2 емкости выгибается вогнутым образом, и объем камеры 6 уменьшается, так что измеренное давление возрастает. К моменту tend достигается положение zx+1 по оси Z, в котором должен создаваться новый слой. Давление в камере pdisp больше, чем pnorm. Поэтому облучение, например, воздействие света (экспонирование), включается только в момент tnext. Это гарантирует, что вытеснение материала, которое характеризуется плоским дном 2 емкости и возникающим вследствие этого давлением в камере pnorm, завершено. Период экспонирования показан на графике Z-положения заштрихованными в клетку прямоугольниками. Знание времени разделения tsep очень ценно с точки зрения технологии процесса, так как без этого вероятная высота разделения zsep должна предполагаться, причем с достаточной уверенностью, чтобы в любом случае достичь разделения. Это приводит к тому, что рабочая платформа 4 (без знания момента разделения tsep) часто смещается дальше в положительном направлении по оси Z, хотя слой Kn уже отделился от дна 2 емкости. При этом на каждый слой расходуется несколько лишних секунд. Обычные создаваемые тела состоят более чем из 1000 слоев, тем самым без знания моментов времени отделения tsep процесс печати занимает значительно больше времени.
в положительном направлении оси z. Благодаря гибкой конструкции дна 2 емкости оно деформируется с вогнутой кривизной в направлении оси Z, и объем камеры 6 увеличивается по сравнению с нормальным объемом Vnorm (см. ниже фиг. 18a). Положительное изменение объема (знак "+" или "1") имеет следствием пропорциональное снижение давления относительно pnorm, что регистрируется датчиком давления 5a. В зависимости от формы сечения, толщины слоя, материала и многих других факторов образованный слой Kn отстает от дна 2 емкости, как только будет достигнута высота zsep (к моменту tsep) (см. фиг. 18c). Изогнутое дно 2 емкости резко возвращается в свою плоскую исходную форму (положение покоя). В зависимости от конструкции и материала дна 2 емкости могут возникать затухающие колебания. Переход дна 2 емкости в положение покоя приводит к быстрому отрицательному изменению объема (знак "-" или "-1"), что приводит к Vnorm и, тем самым, к измеримому изменению давления от psep до pnorm. Таким образом, момент отрыва или отделения tsep можно распознать, например, по изменению знака изменения объема с "1" на "-1" в процессе разделения (знак изменения объема факультативно можно определить как знак, противоположный знаку изменения давления). В результате процесс отделения, т.е. подъем рабочей платформы 4, заканчивается, и рабочая платформа перемещается с zsep на zx+1 (опускается). В момент tdisp происходит вытеснение материала, из-за чего дно 2 емкости выгибается вогнутым образом, и объем камеры 6 уменьшается, так что измеренное давление возрастает. К моменту tend достигается положение zx+1 по оси Z, в котором должен создаваться новый слой. Давление в камере pdisp больше, чем pnorm. Поэтому облучение, например, воздействие света (экспонирование), включается только в момент tnext. Это гарантирует, что вытеснение материала, которое характеризуется плоским дном 2 емкости и возникающим вследствие этого давлением в камере pnorm, завершено. Период экспонирования показан на графике Z-положения заштрихованными в клетку прямоугольниками. Знание времени разделения tsep очень ценно с точки зрения технологии процесса, так как без этого вероятная высота разделения zsep должна предполагаться, причем с достаточной уверенностью, чтобы в любом случае достичь разделения. Это приводит к тому, что рабочая платформа 4 (без знания момента разделения tsep) часто смещается дальше в положительном направлении по оси Z, хотя слой Kn уже отделился от дна 2 емкости. При этом на каждый слой расходуется несколько лишних секунд. Обычные создаваемые тела состоят более чем из 1000 слоев, тем самым без знания моментов времени отделения tsep процесс печати занимает значительно больше времени.
Фигуры 20a и 20b показывают процесс отделения трех тел K от дна 2 емкости, при этом тело K, показанное на фиг. 20b крайним справа, уже отделено от дна 2 емкости, и дно 2 емкости в зоне под показанным крайним справа телом K вернулось в свое положение покоя. Обнаруженное датчиком 5 (датчик давления 5a или датчик расхода 5b) изменение объема (изменение давления или изменение количества вещества) в камере 6 позволяет установить, не были ли отдельные тела K еще отделены.
На фиг. 21 показано изменение во времени давления и положения по оси Z или высоты рабочей платформы 4 относительно положения покоя дна 2 емкости во время создания слоя, отслеживаемого датчиком 5, в частности, датчиком давления 5a. В момент tsep1 тело K, показанное крайним справа, отделяется от дна 2 емкости, в момент tsep2 от дна 2 емкости отделяется тело, показанное в центре, и в момент tsep3 от дна емкости отделяется тело, показанное крайним слева. Три локальных минимума на зависимости изменения давления от времени соответствуют трем давлениям отделения psep1, psep2, psep3 трех образованных тел K. Продолжительность экспонирования показана на графике Z-положения заштрихованными в клетку прямоугольниками.
Фиг. 22 показывает статическую силовую модель процесса сепарации (процесса отделения) для возможного расчета заданного изменения объема, с которым можно сравнивать фактические изменения объема. Это позволяет также сопоставить отдельные моменты отделения с создаваемым телом K.
Учитываются тянущее усилие FObj, возвращающая сила изогнутого дна 2 емкости Fvat, вес 


Справедливо:


Силы можно узнать, зная свойства материала и уровень наполнения, а также измеряя давление, входящее в правую часть приведенного выше уравнения. Рабочую зону станка можно понимать как общее пространство в станке, это может быть также установочное пространство.
Так как форма и положение AObj известны, можно, зная высоту по оси Z и свойств материала пленки 13a, приближенно рассчитать/предсказать Fvat. Из этого можно определить тянущее усилие FObj. Оно влияет на качество объекта и может привести к нежелательному отделению рабочей платформы 4. Эта величина может также служить в качестве задающего воздействия в цепи регулирования со скоростью отделения в качестве управляющего параметра.
Кроме того, используя известные параметры, можно рассчитать кривизну пленки, вызванную прогибом. Полученное в результате заданное изменение объема можно сравнить с фактическим изменением объема согласно данным датчика, которое определяется следующим образом.
Изменение состояния камеры определяется из соотношения:
При этом для объемов справедливо  , откуда можно рассчитать фактическое изменение объема.
, откуда можно рассчитать фактическое изменение объема.
Слишком большое отклонение между заданным и фактическим объемами  указывает на уменьшение жесткости емкости, на основании чего можно судить о старении или качестве емкости 3.
указывает на уменьшение жесткости емкости, на основании чего можно судить о старении или качестве емкости 3.
Таким образом, устройство и способ позволяют, используя известное положение рабочей платформы 4 и известные положения отверждения, например, в форме матрицы экспонирования, моделировать заданную деформацию гибкого дна 2 емкости и сравнивать полученное из модели заданное изменение давления (заданное изменение объема) с фактическим изменением давления (изменением объема). Отклонения указывают, среди прочего, на изменение жесткости емкости, на основании чего можно оценить старение или качество емкости 3.
Фигуры 23a - 23c показывают взаимосвязь между установкой высоты рабочей платформы 4 и временем экспонирования отверждающегося материала S для трех режимов процесса. Период экспонирования показан на графиках заштрихованными в клетку прямоугольниками.
На фиг. 23a показан, в частности, способ, при котором экспонирование отверждающегося материала S без использования ингибирующего слоя I происходит отдельно от перемещения рабочей платформы 4 (асинхронный режим без ингибирующего слоя I). При этом рабочая платформа 4 отъезжает вверх в положительном направлении оси Z, чтобы отделить созданный слой от дна 2 емкости. Отделение созданного слоя от дна 2 емкости распознается на основе значений, измеренных датчиком 5 (датчик давления 5a или датчик расхода 5b), и подъем рабочей платформы 4 заканчивается. Рабочая платформа 4 снова опускается, и после периода ожидания перемещения экспонируется следующий слой. Значения, измеренные датчиком 5 (датчиком давления 5a или датчиком расхода 5b), в асинхронном режиме с емкостью 3 без ингибирующего слоя I используются для определения момента отсоединения и для регулирования скорости отделения, исходя из максимально допустимого изменения объема в единицу времени.
Фиг. 23b показывает, в частности, способ, при котором воздействие света на отверждающийся материал S и перемещение рабочей платформы 4 вверх на расстояние, равное толщине одного слоя, происходят одновременно (синхронный режим с ингибирующим слоем I). Датчик давления 5a, а также датчик расхода 5b могут при этом применяться для контроля уровня наполнения 2 емкости и/или расхода ингибирующего слоя и, таким образом, для обеспечения надлежащего управления давлением в камере 6, подачи ингибирующей среды в камеру 6 и регулирования температуры в камере 6.
На фиг. 23c показан, в частности, способ, при котором воздействие света на отверждаемый материал S происходит после перемещения рабочей платформы 4 вверх на высоту, равную толщине одного слоя, для случая использования ингибирующего слоя I (асинхронный режим с ингибирующим слоем I).
Фиг. 24 показывает устройство 1 согласно изобретению, похожее на устройство 1 с фиг. 1, но, в отличие от устройства 1 с фиг. 1, вместо датчика давления 5a, который взаимодействует с закрытой камерой 6, предусмотрен датчик расхода 5b, который взаимодействует с частично открытой камерой 6. Частично открытая камера 6 имеет отверстие 34, служащее в качестве впуска и выпуска текучей среды. Таким образом, в случае изменения объема камеры 6 заключенная или содержащаяся в камере 6 текучая среда может втекать и вытекать через отверстие 34. Это течение текучей среды через отверстие 34 детектируется датчиком расхода 5b. Специалисту должно быть понятно, что на некоторых из представленных на фигурах примерах осуществления закрытая камера 6 с датчиком давления 5a может быть заменена открытой камерой 6 с датчиком расхода 5b, в частности, в зависимости от технологических этапов, осуществляемых устройством 1.
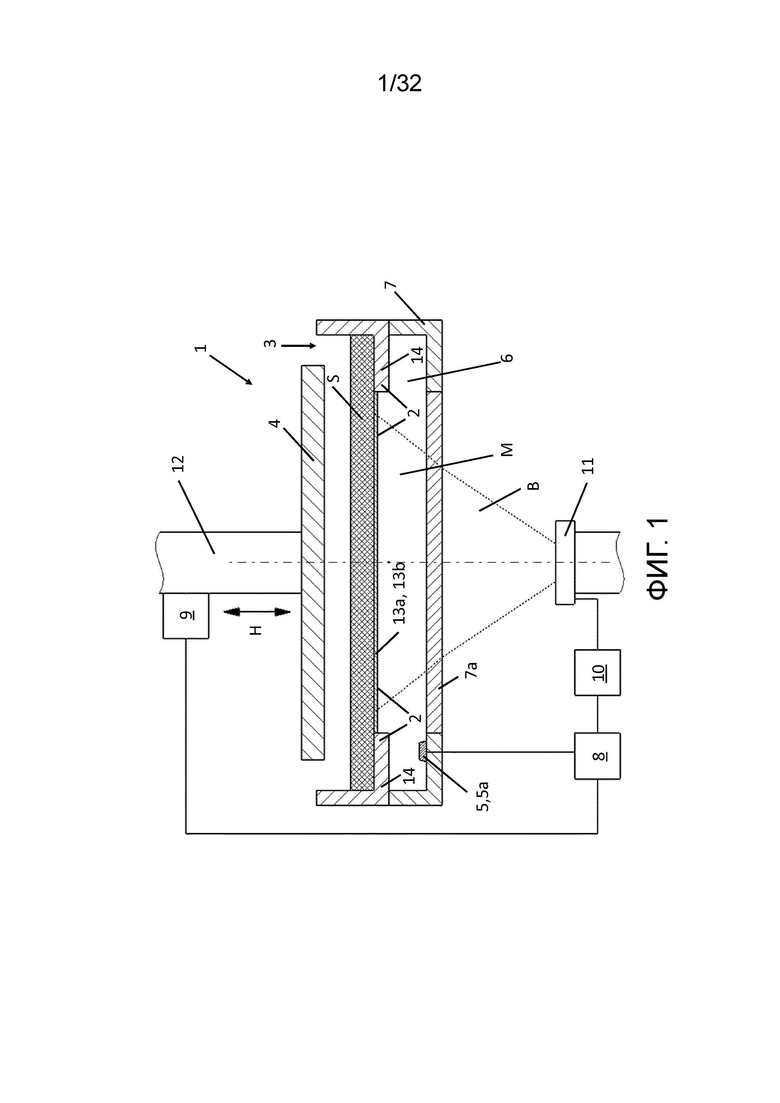
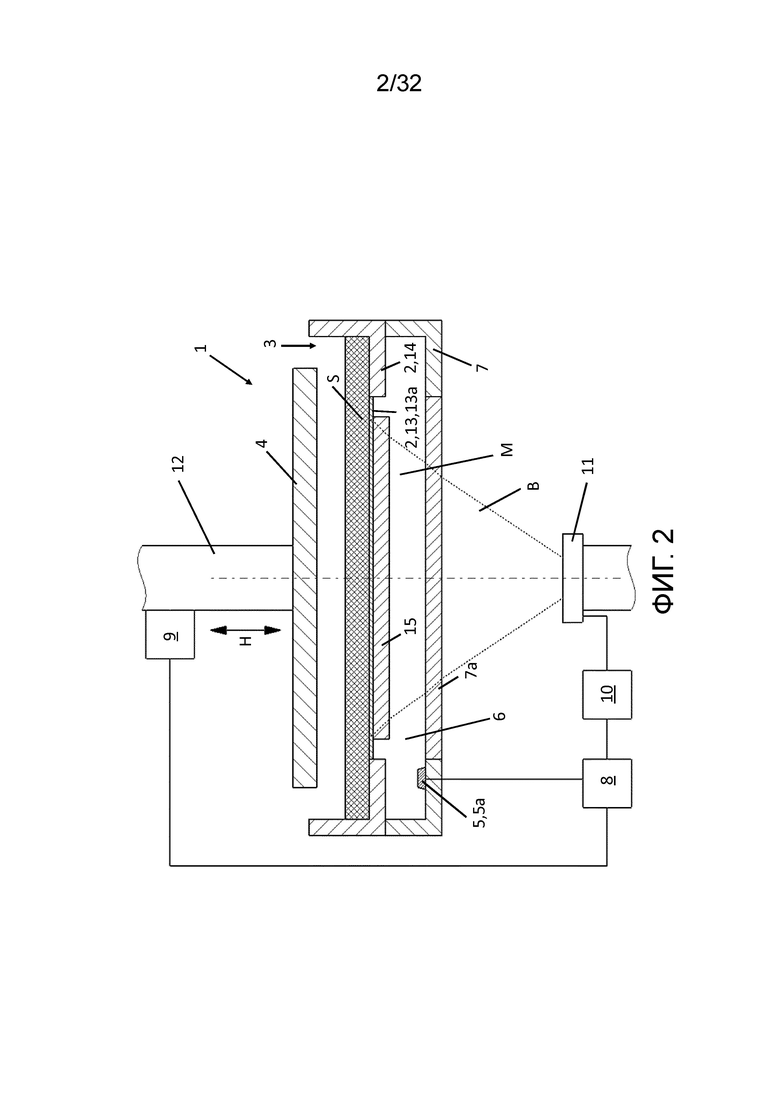
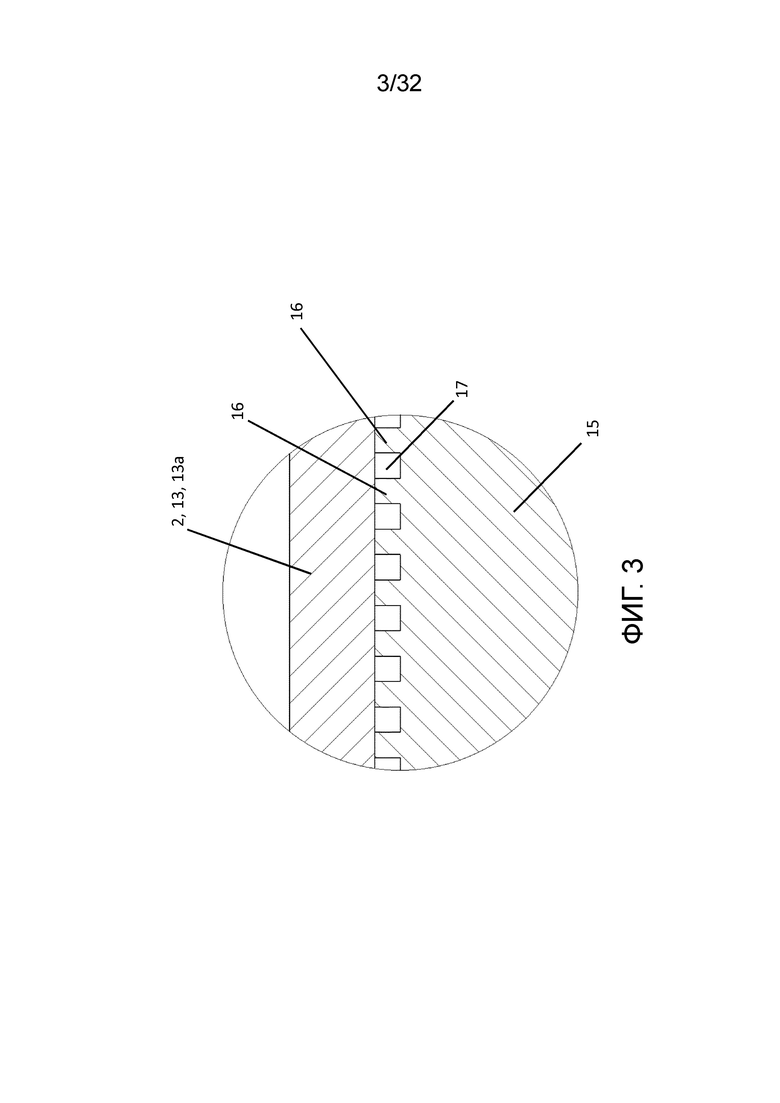
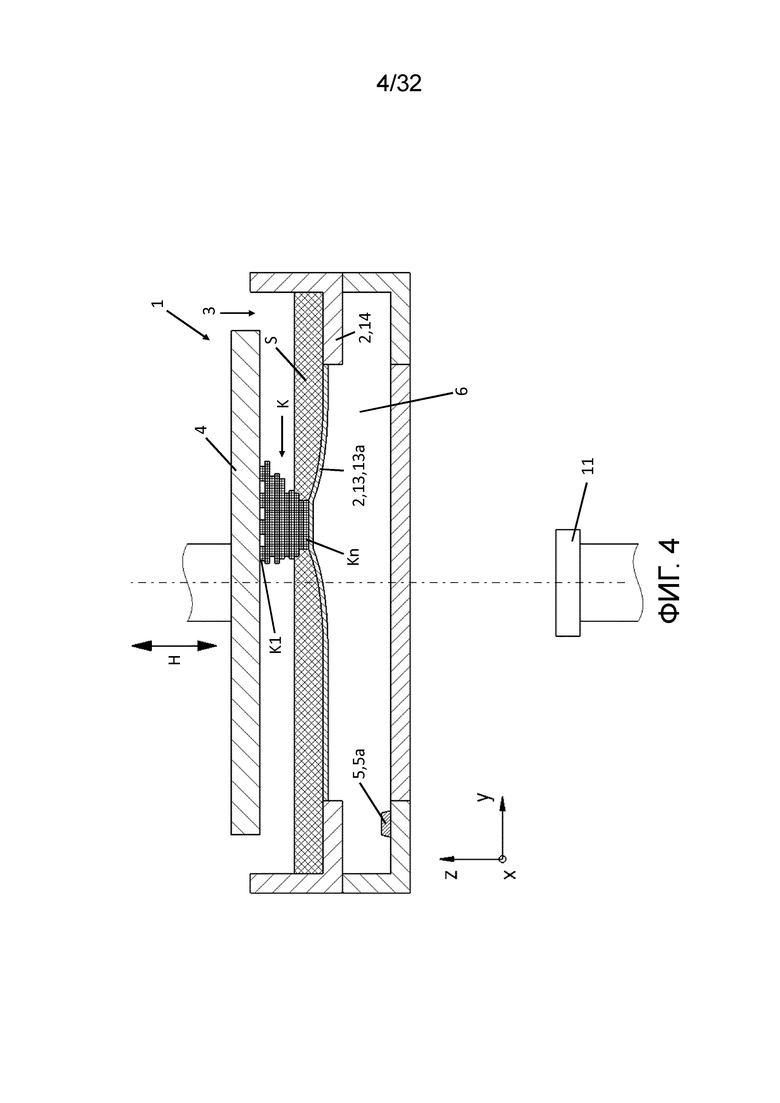
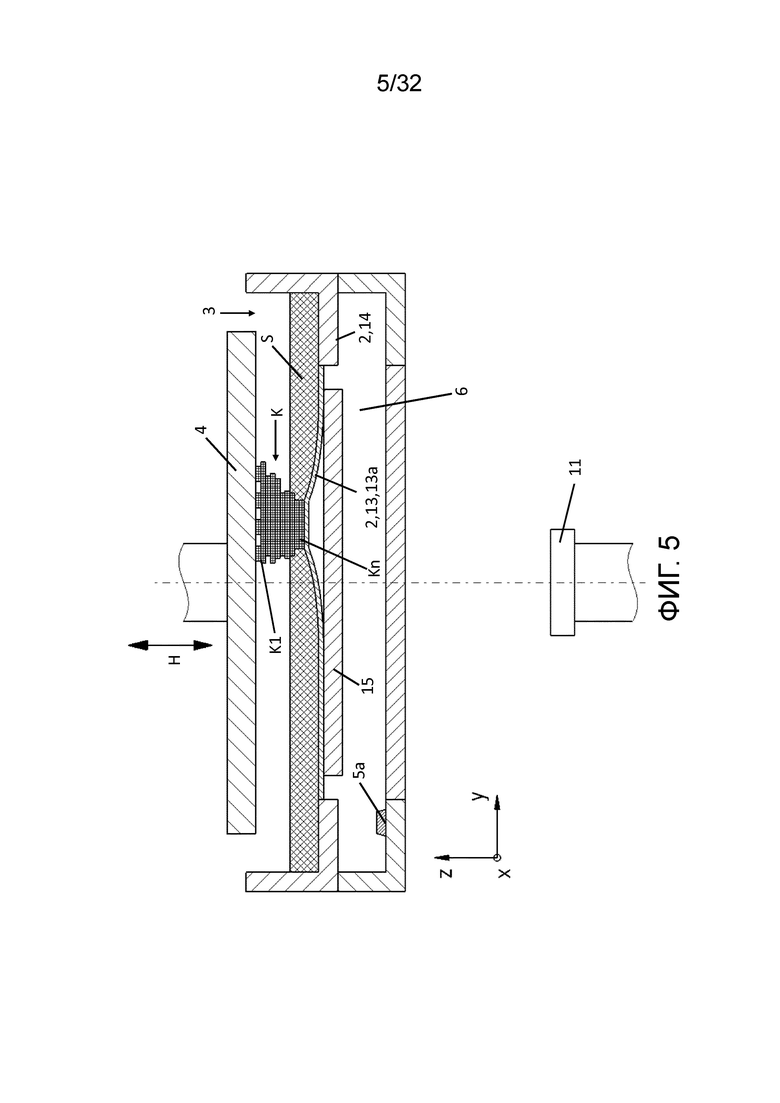
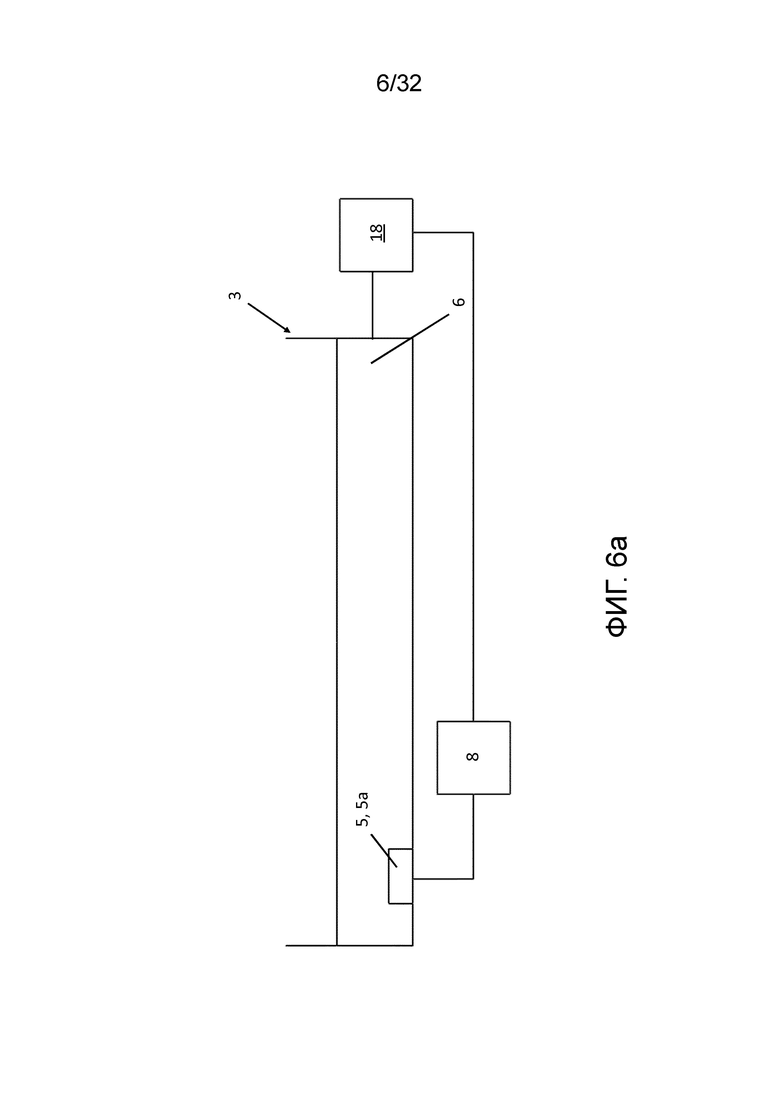
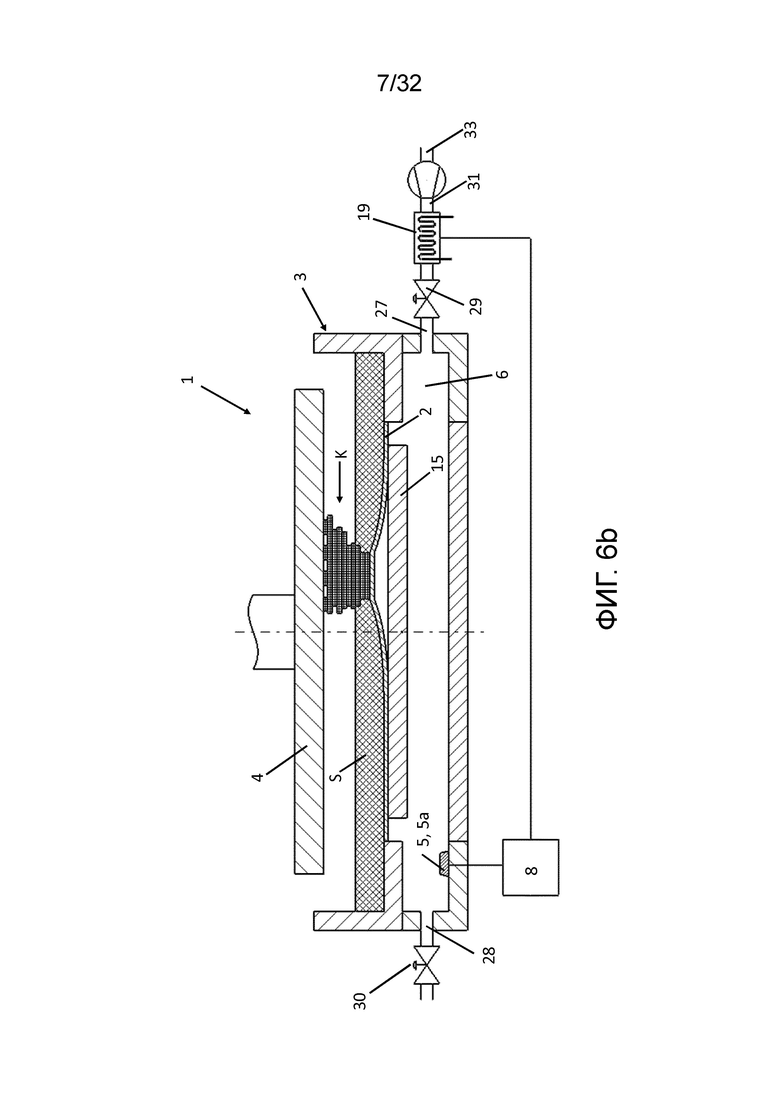
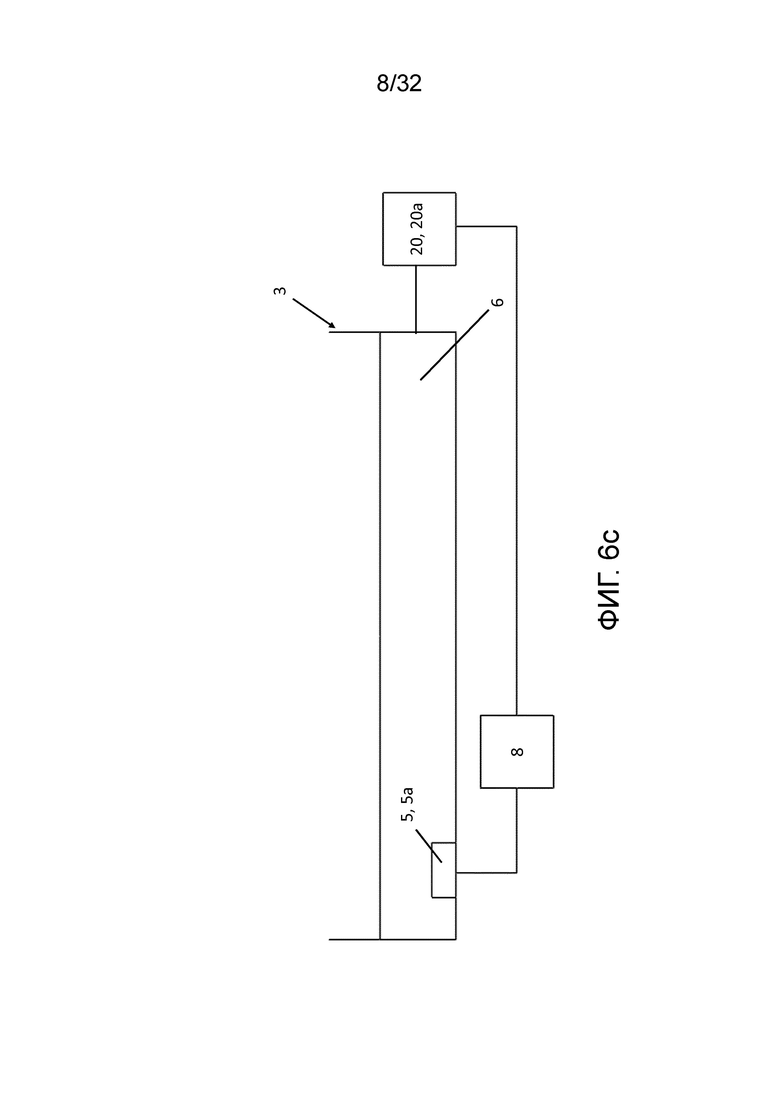
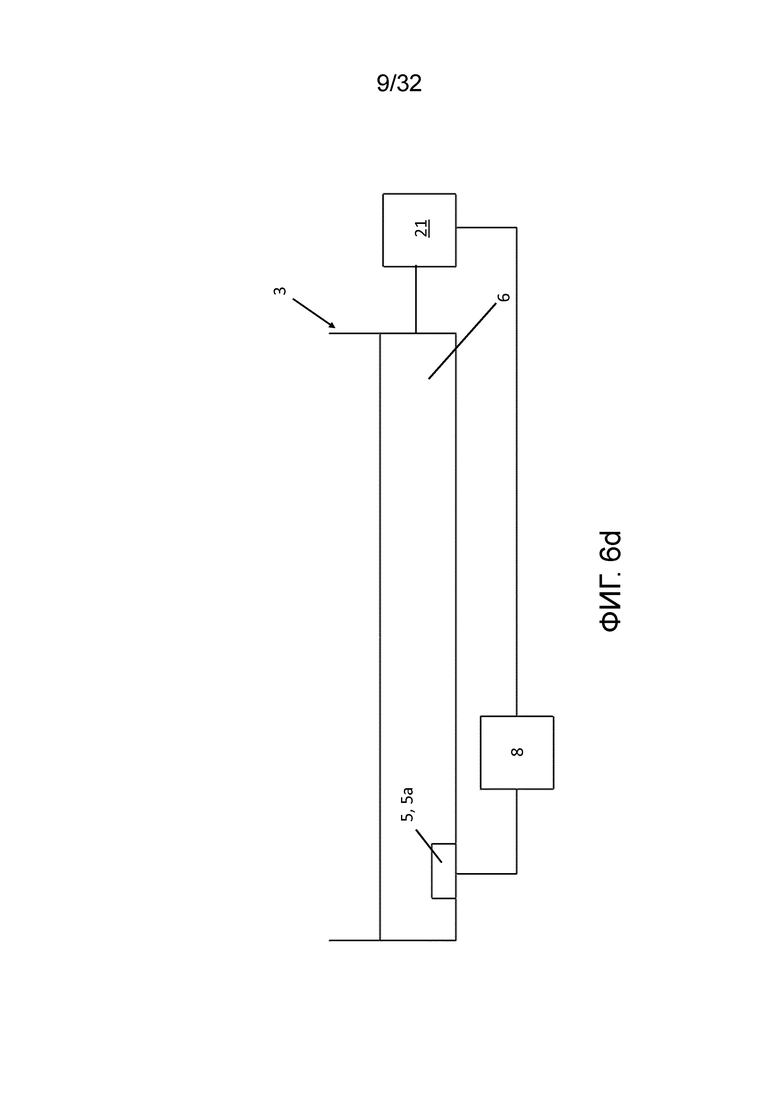
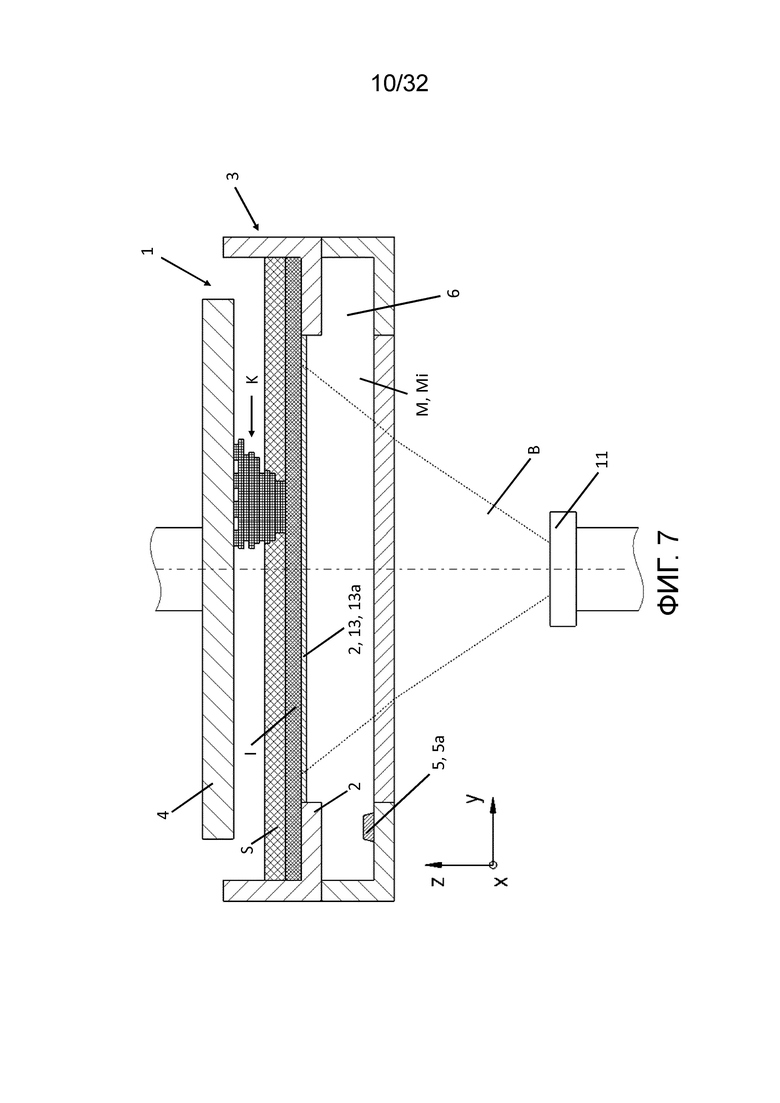
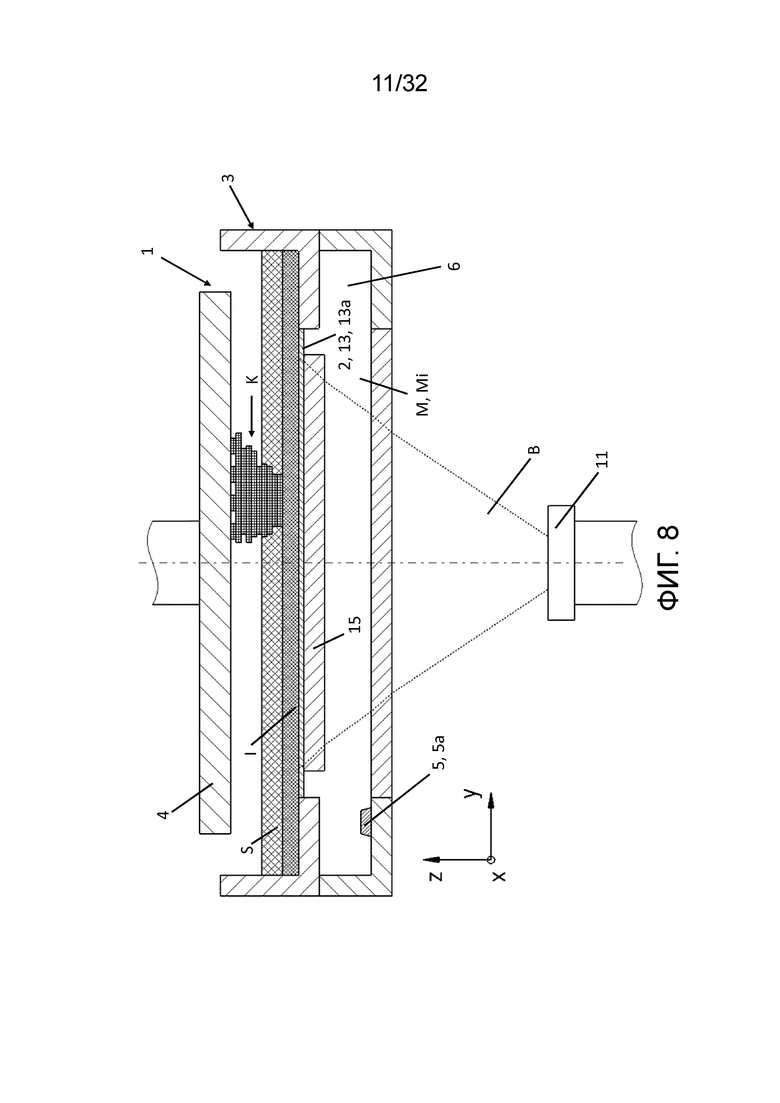
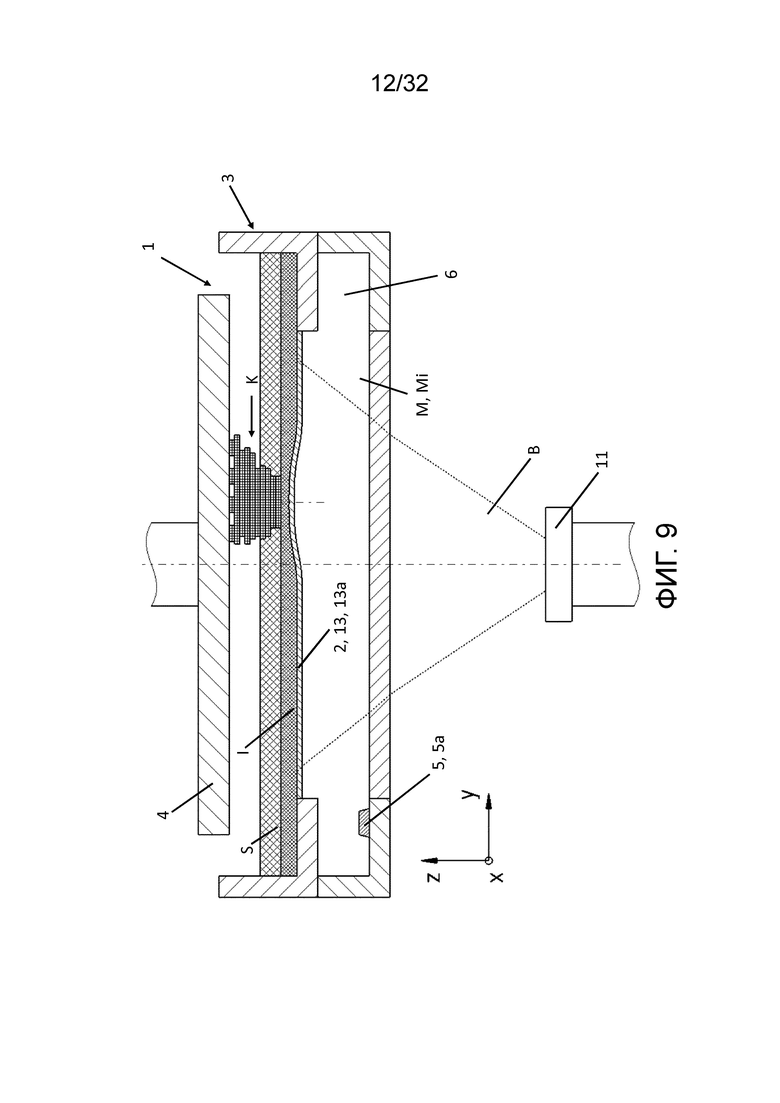
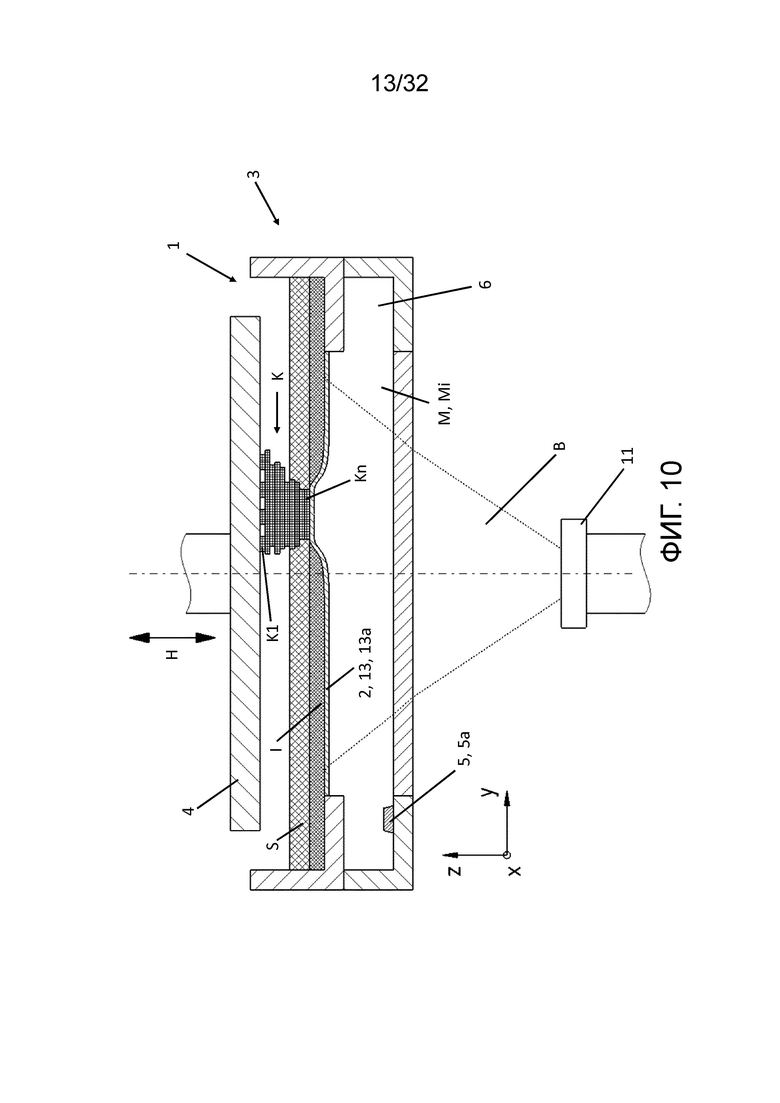
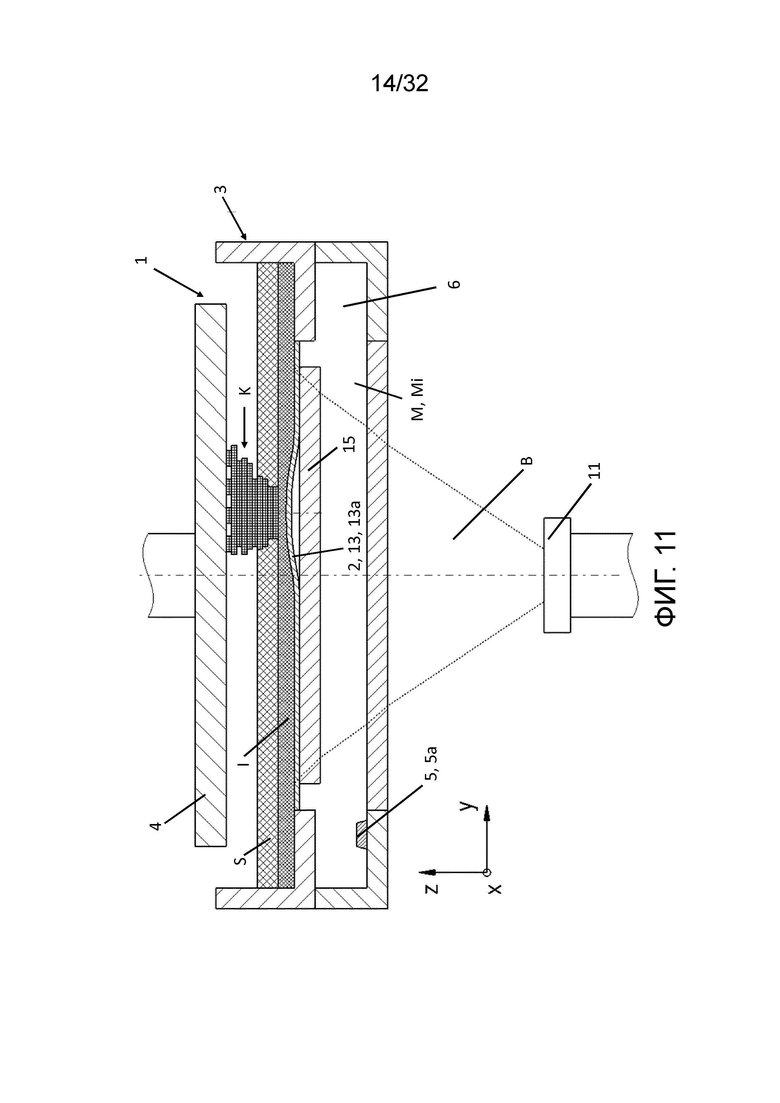
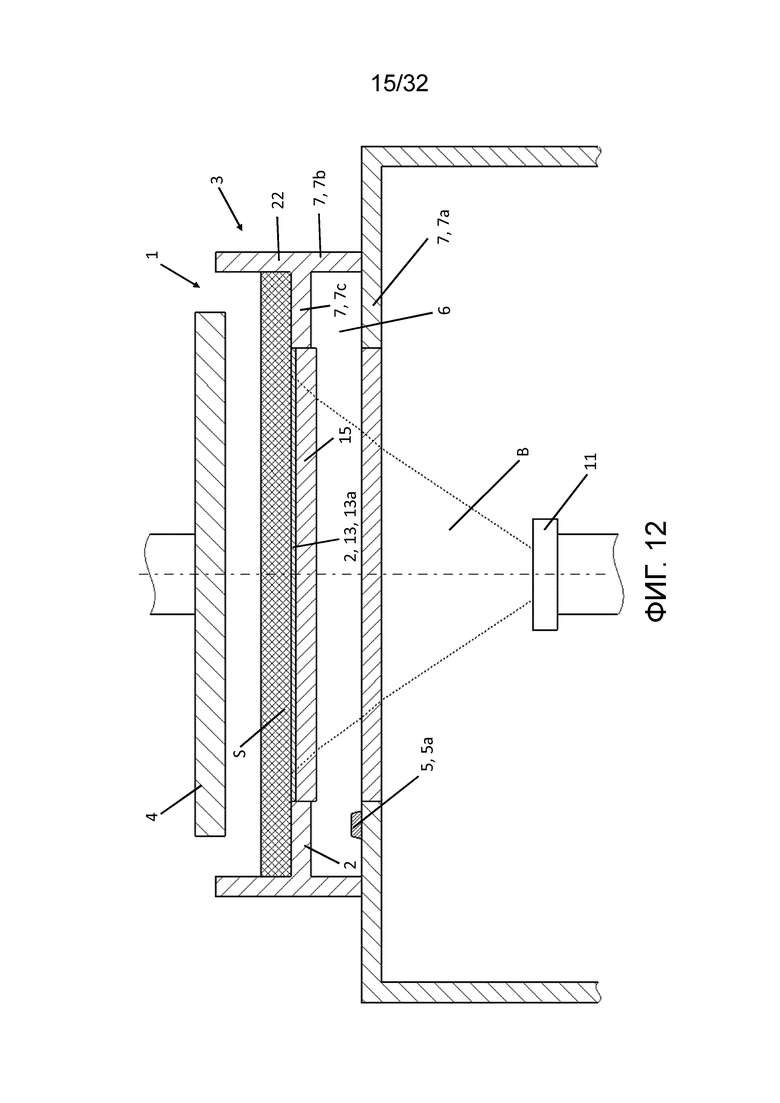
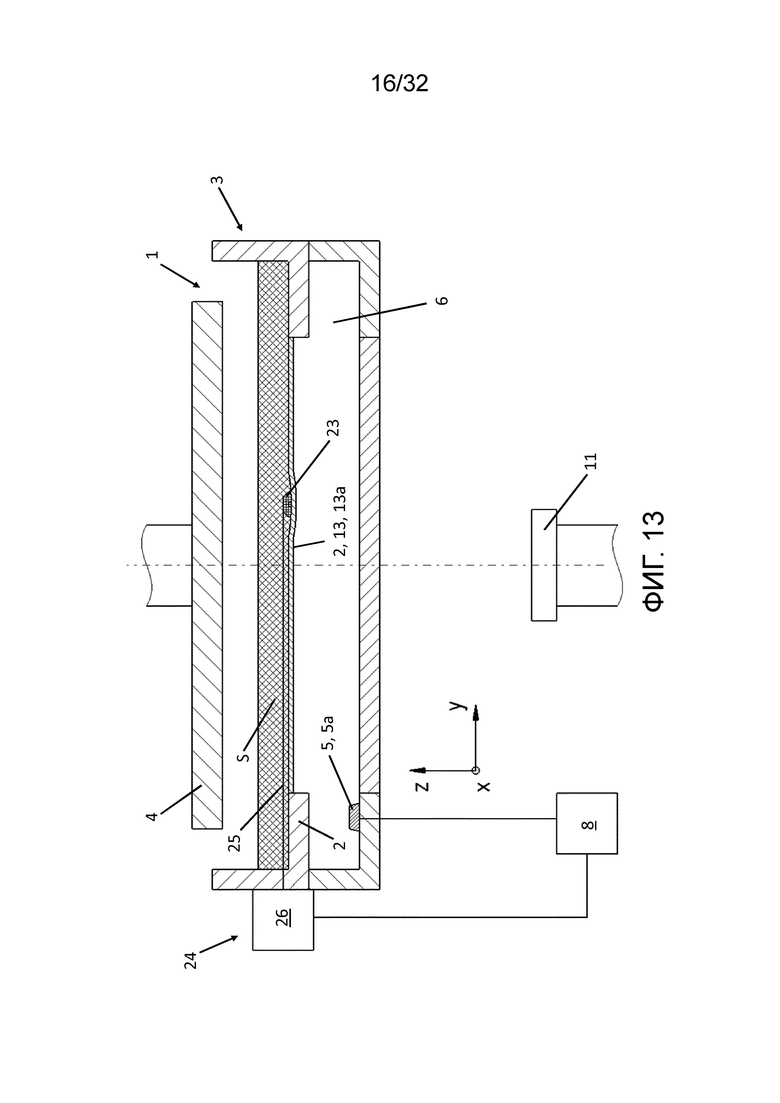
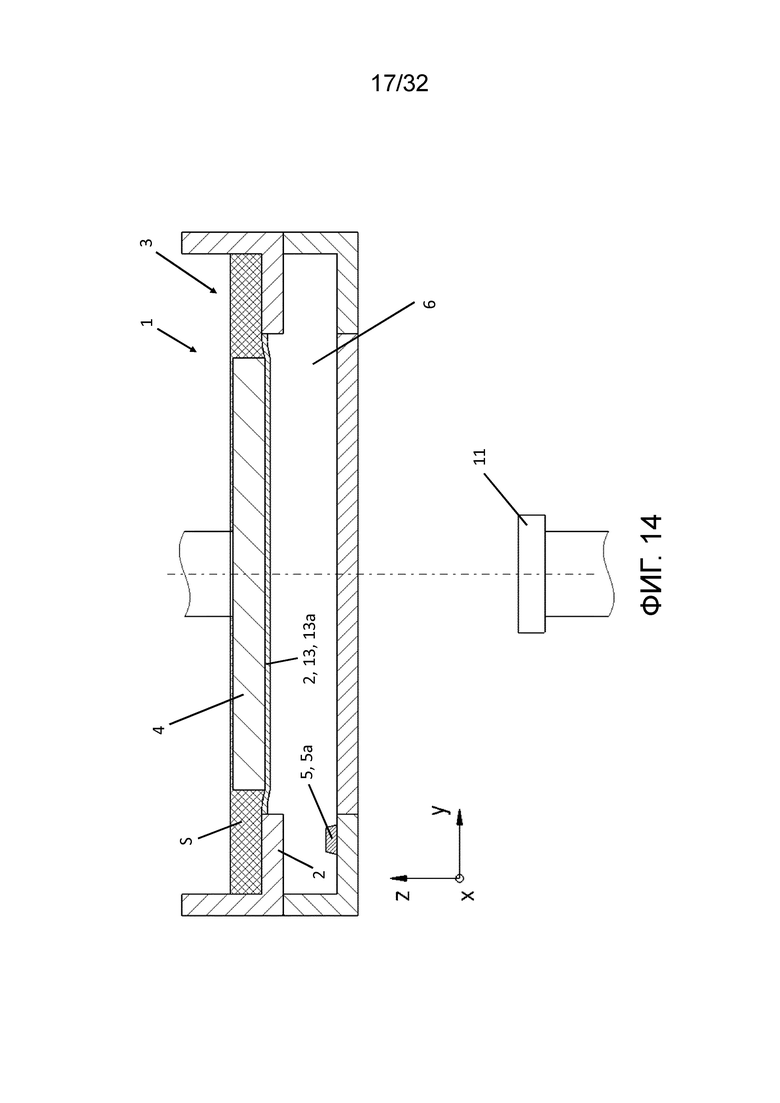
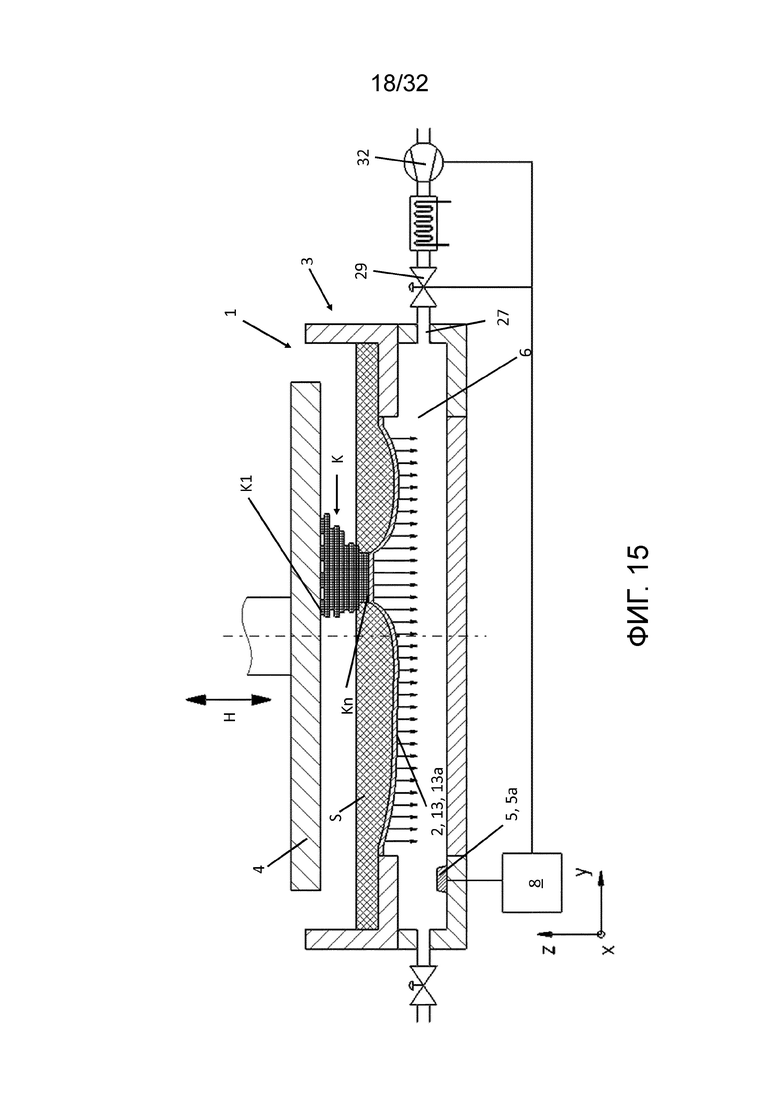
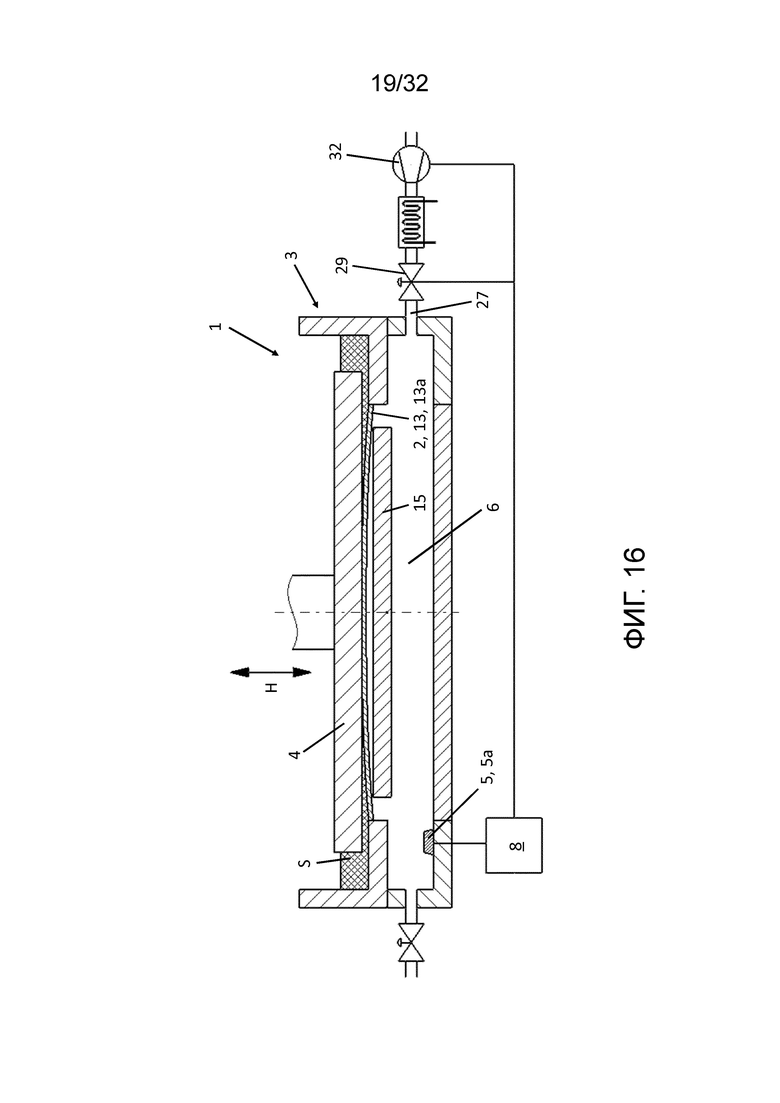
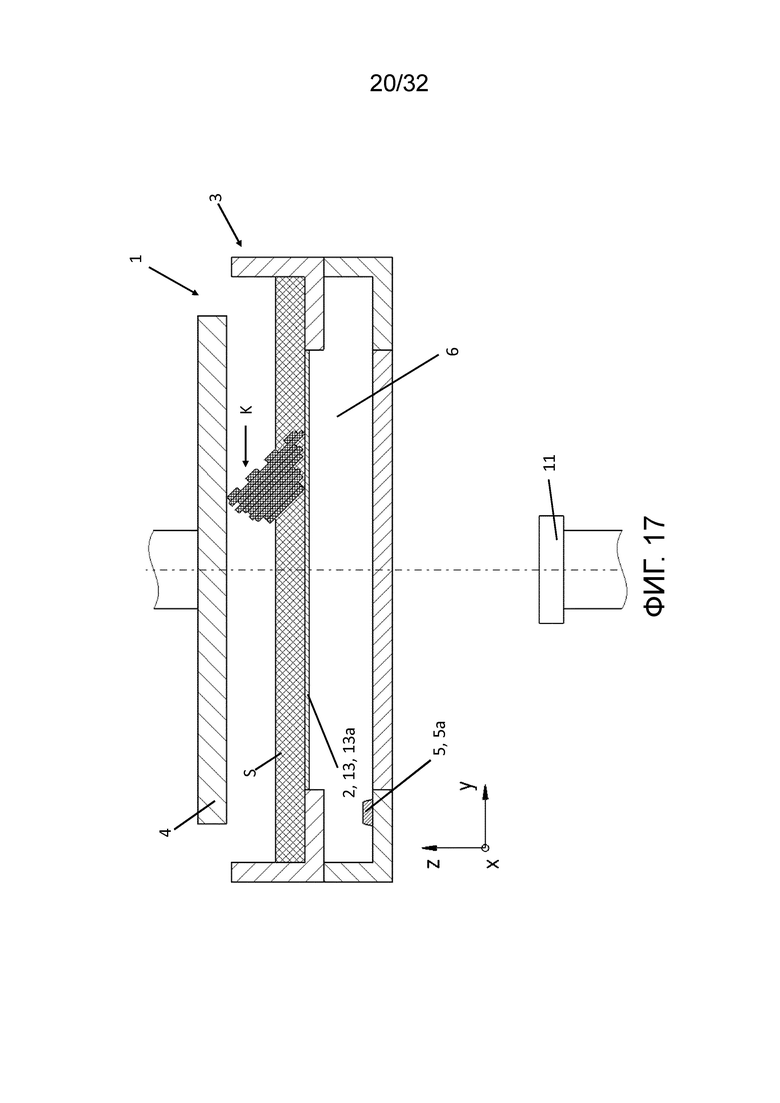
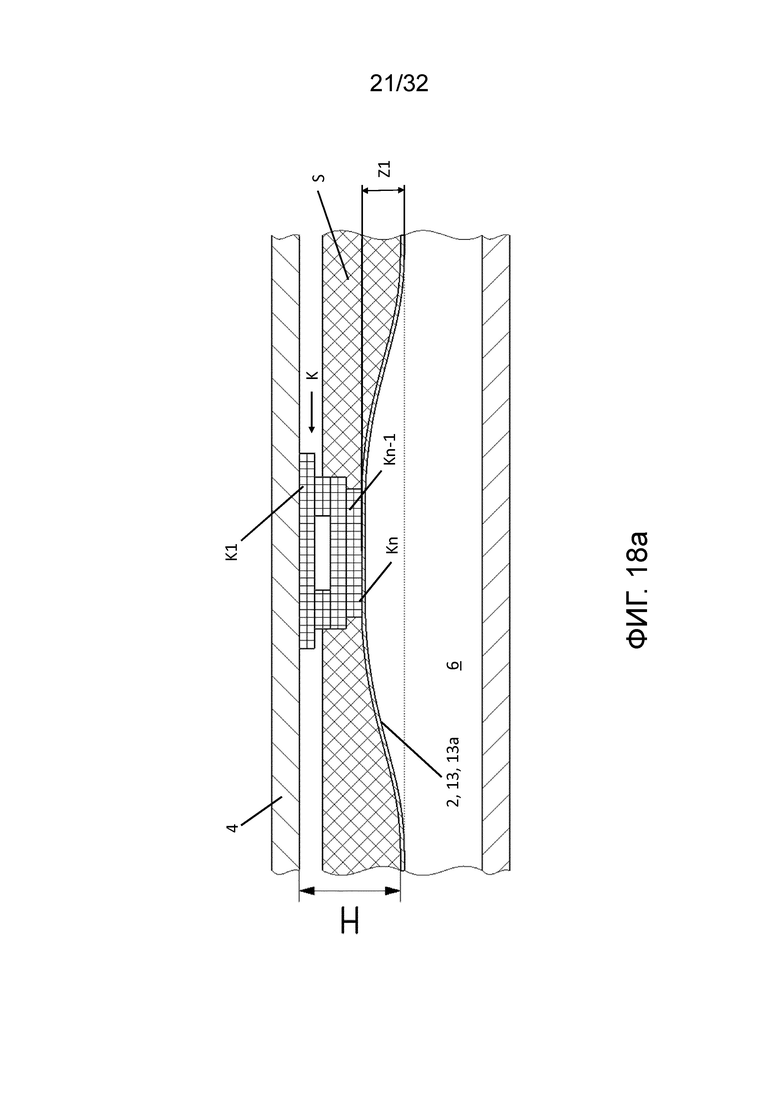
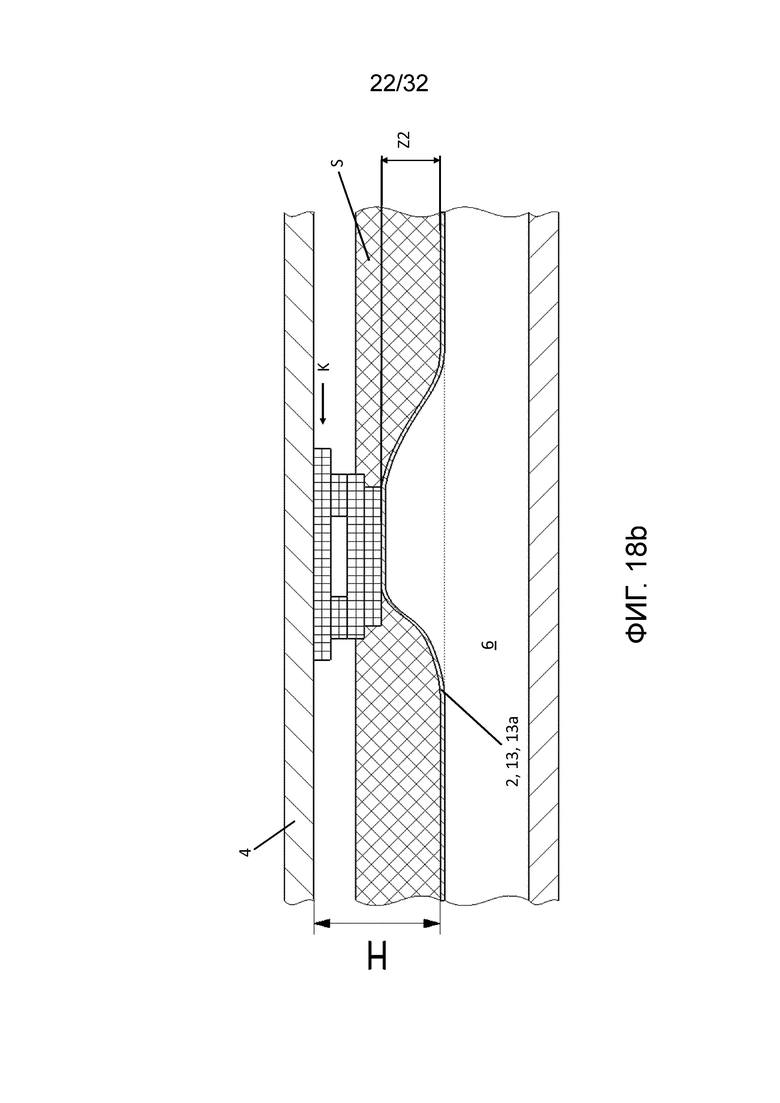
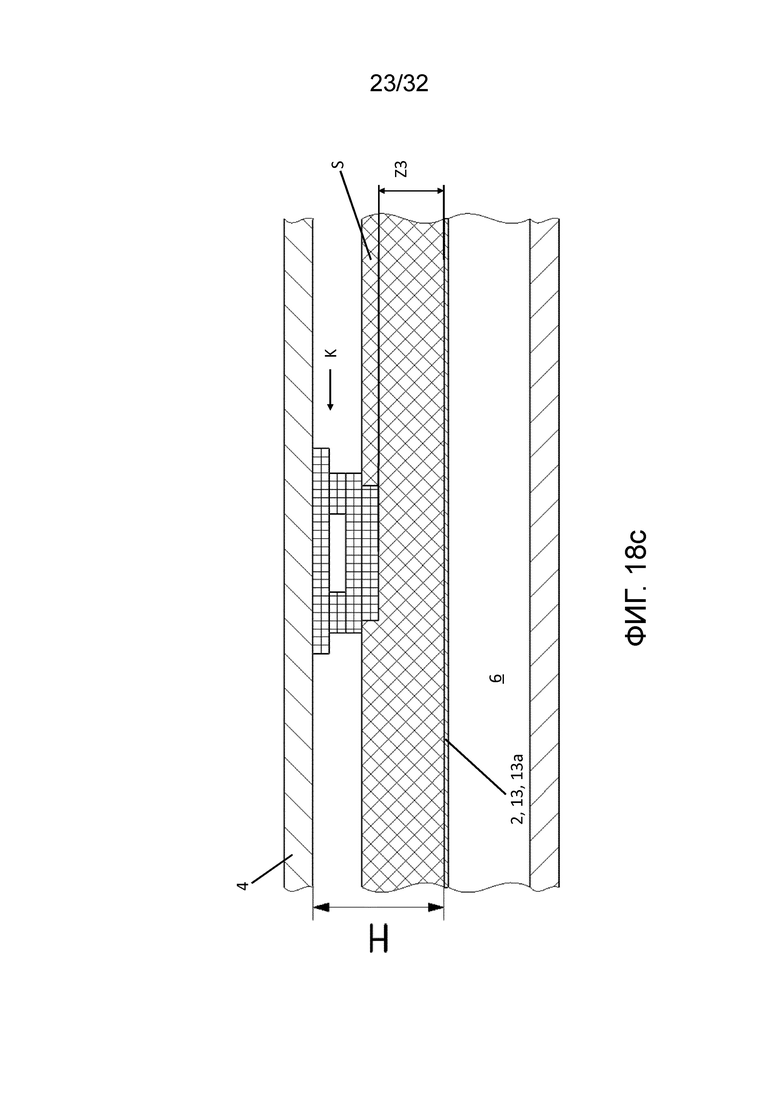
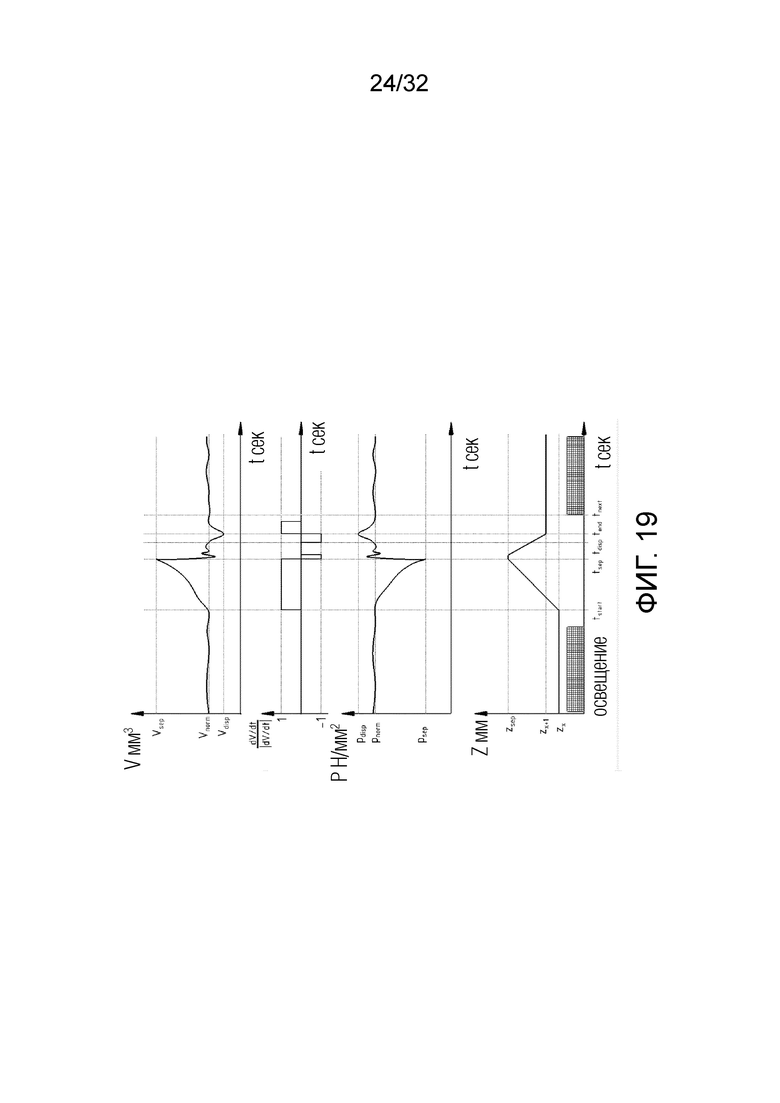
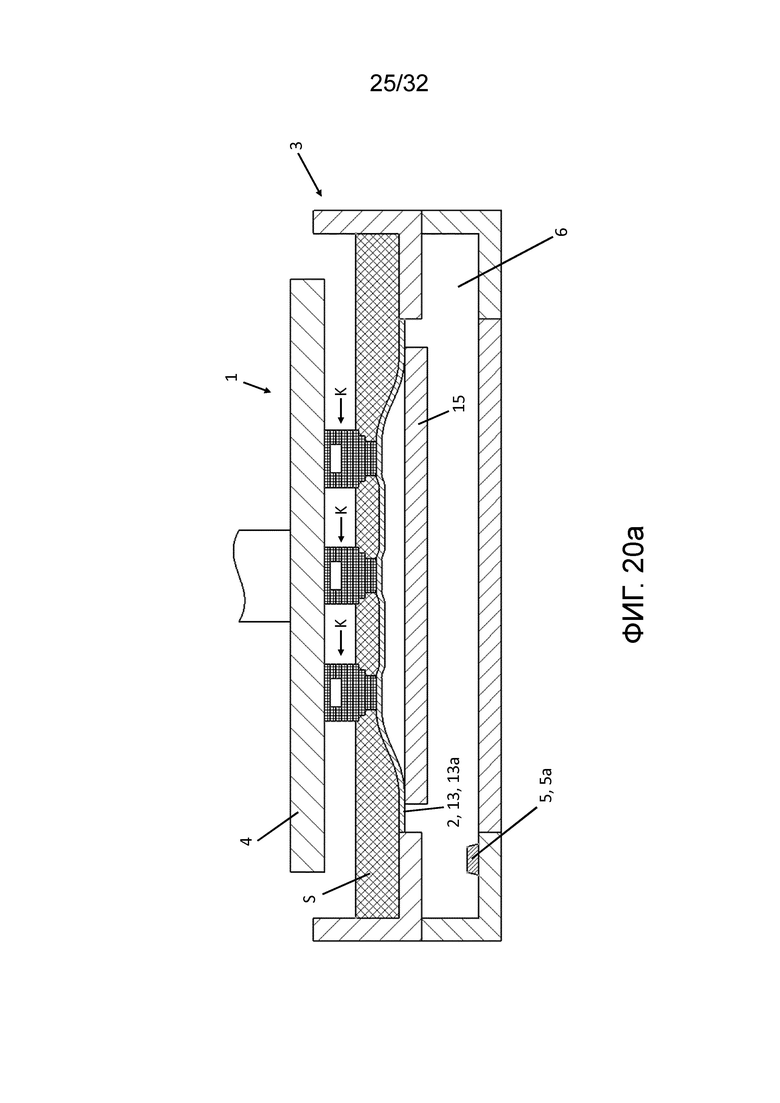
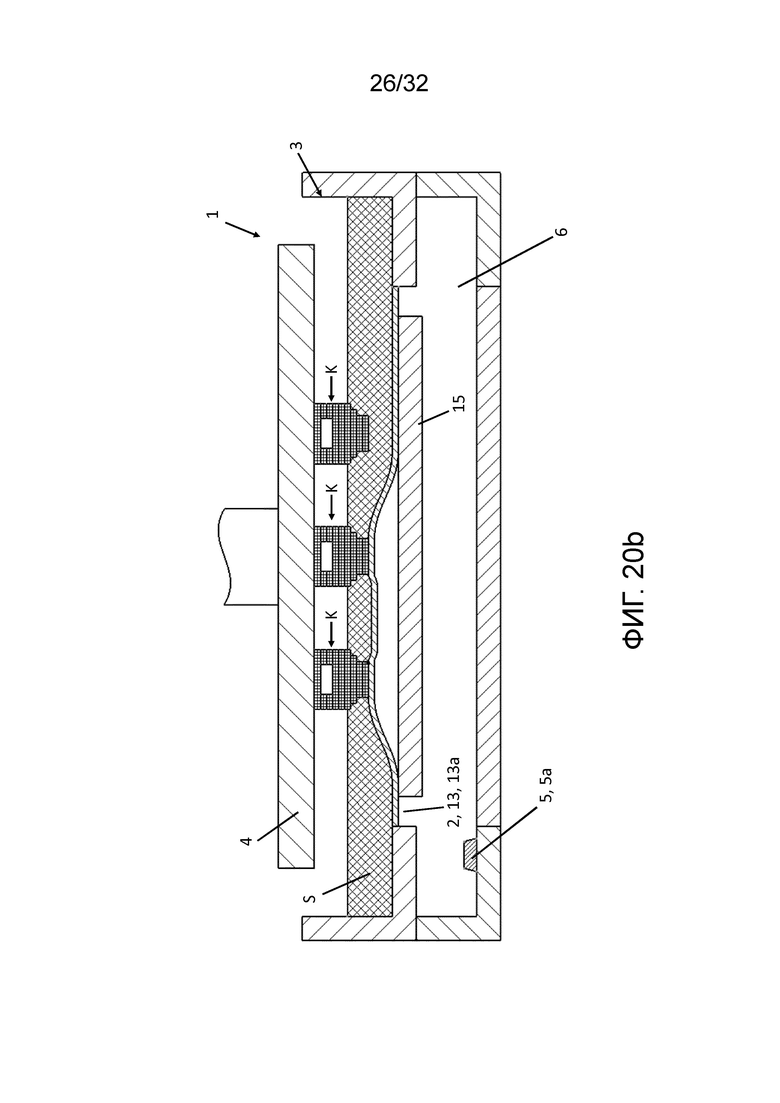
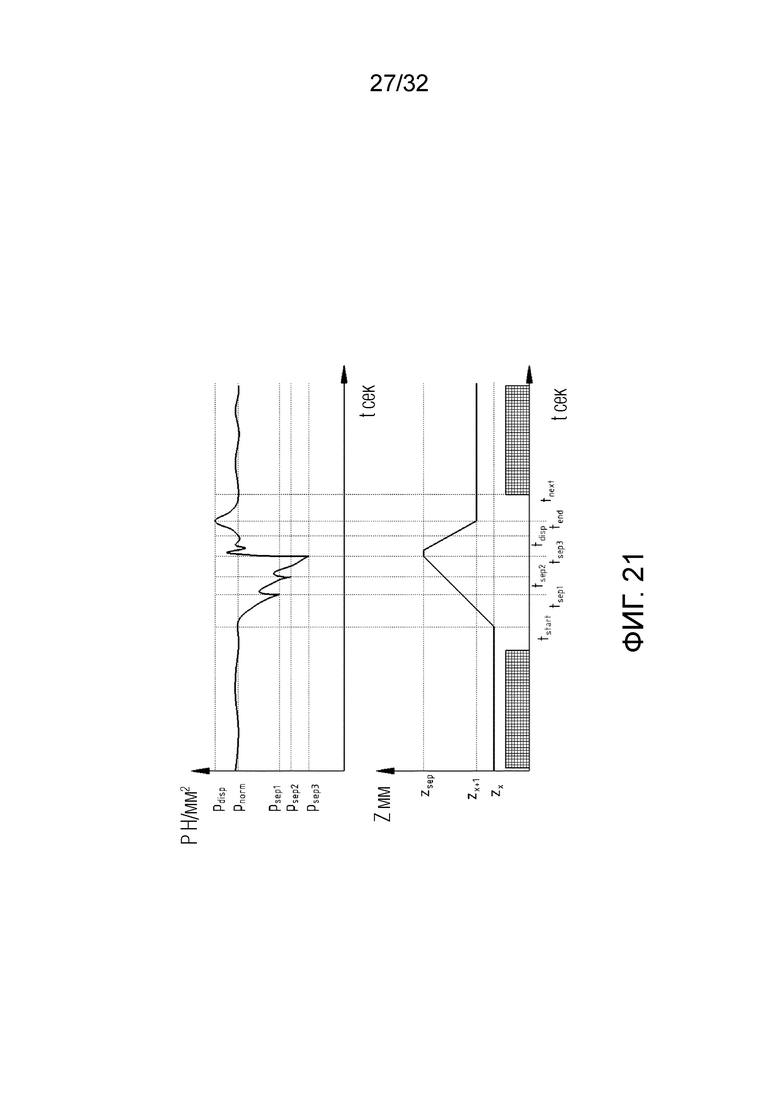
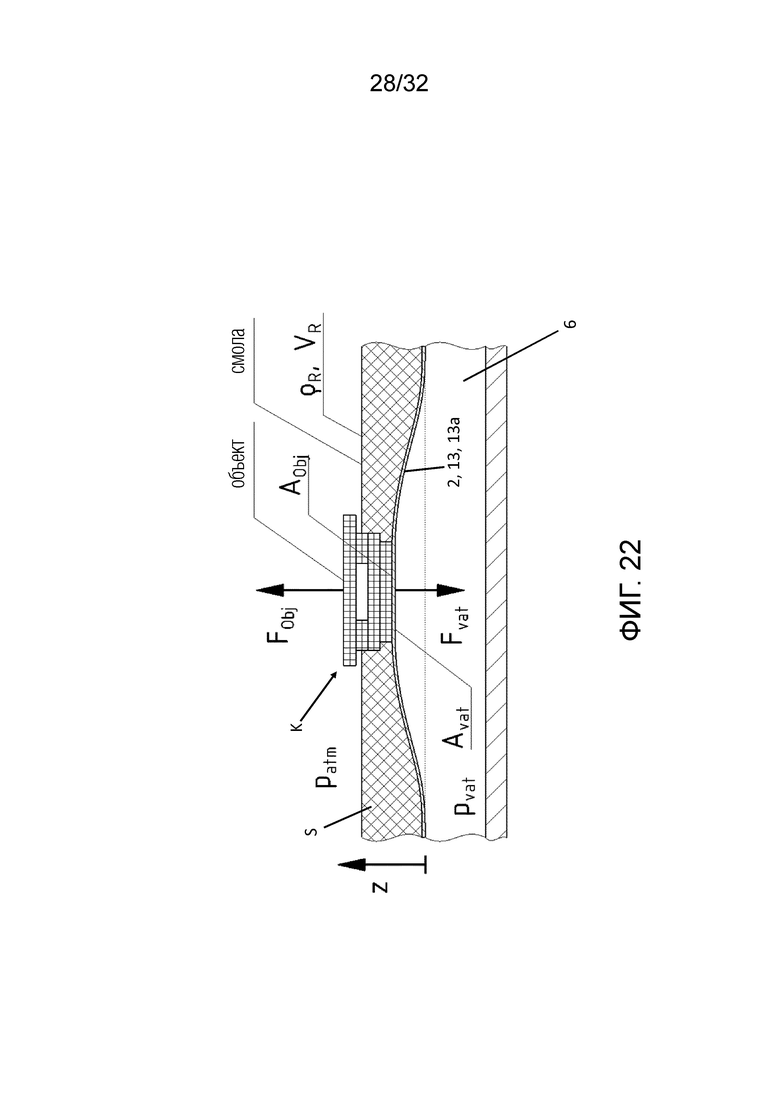
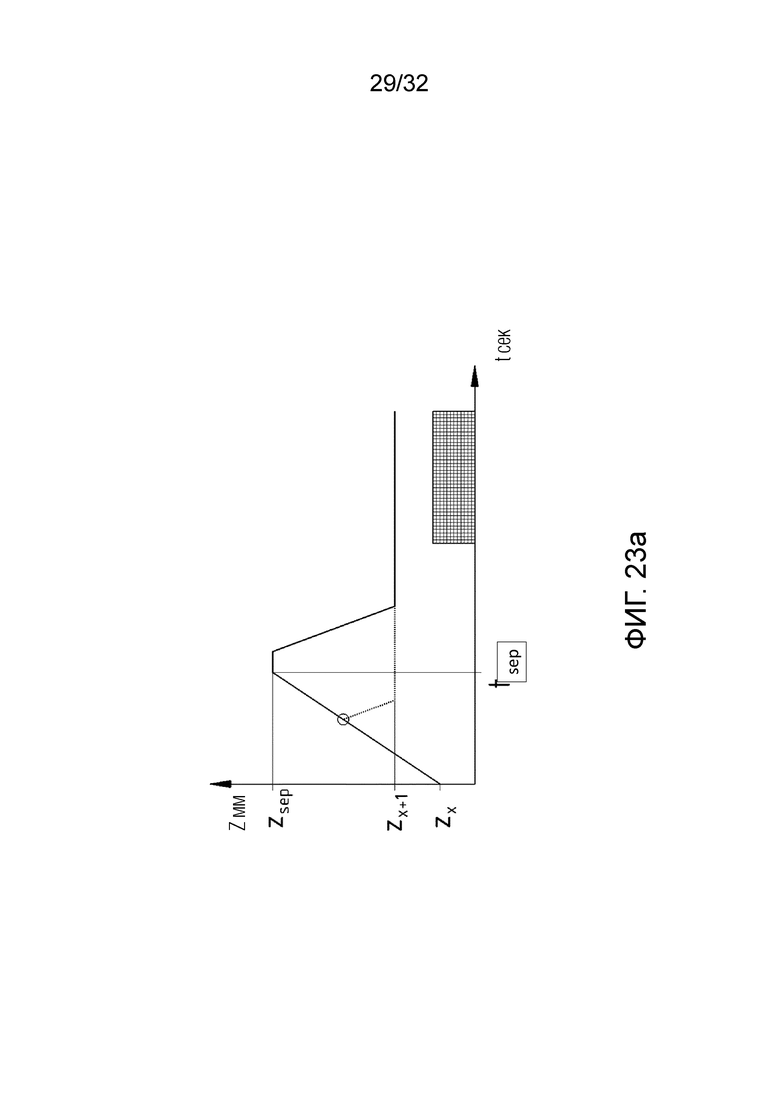
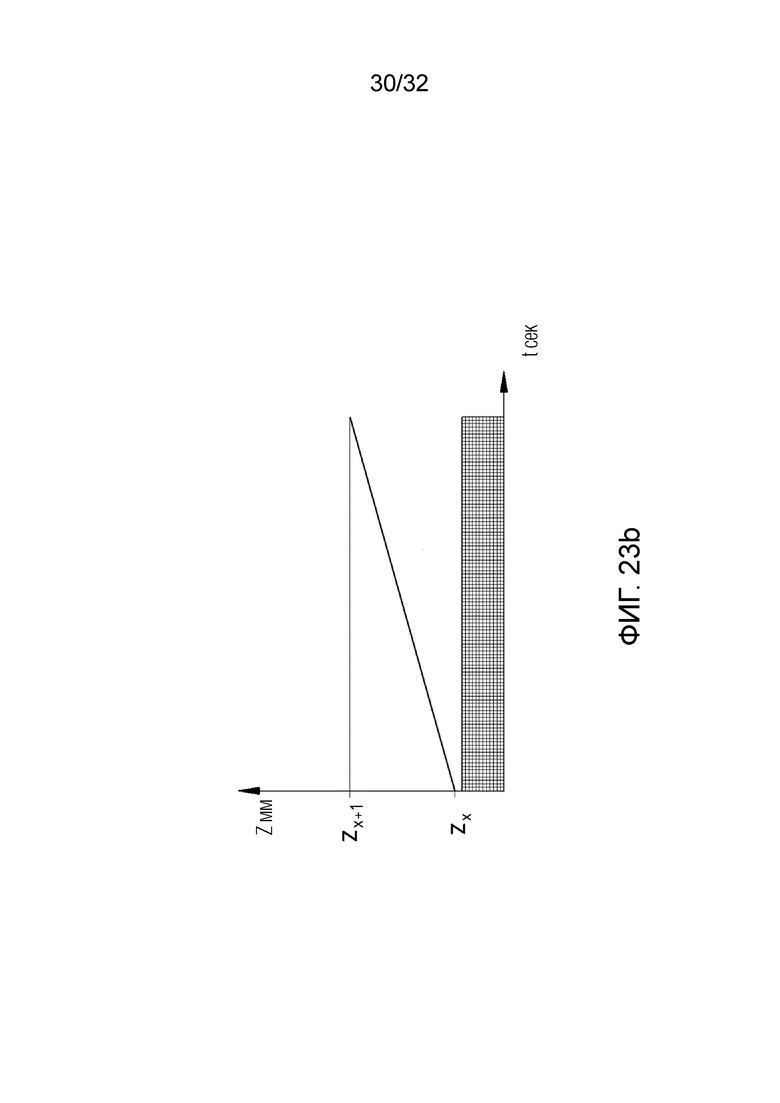
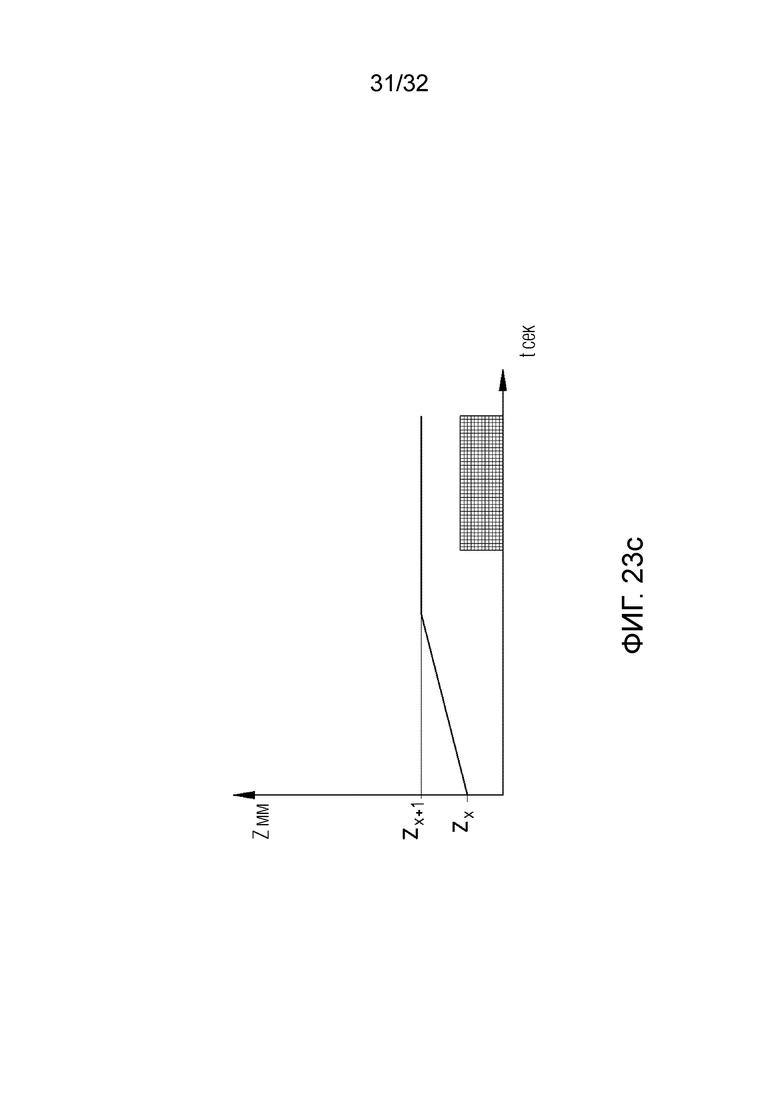
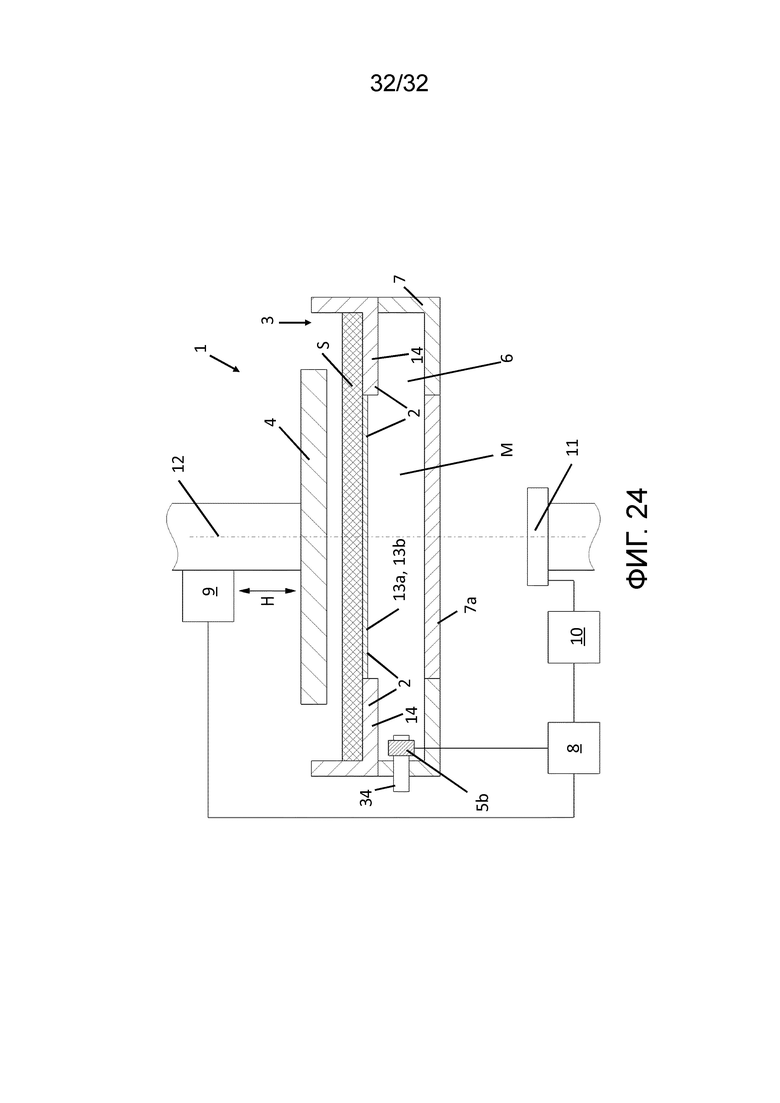
Изобретение относится к устройству для установки послойного формирования тела из радиационно-отверждаемого материала, а также к способу послойного формирования тела из радиационно-отверждаемого материала. Устройство (1) для установки послойного формирования тела (K) из радиационно-отверждаемого материала (S) содержит емкость (3), имеющую дно (2), для вмещения радиационно-отверждаемого материала (S), рабочую платформу (4), расположенную выше дна (2) емкости и регулируемую по высоте относительно дна (2) емкости, и взаимодействующий с дном (2) емкости датчик (5). Причем дно (2) емкости по меньшей мере частично выполнено гибким, и предусмотрена камера (6), которая ограничена нижней стороной дна (2) емкости, при этом датчик (5) предназначен для обнаружения изменения объема камеры (6) и выдачи сигнала датчика, из которого можно установить знак изменения объема, для количественного определения измеряемого параметра, который прямо или косвенно пропорционален объему камеры или изменению объема и для предоставления его в качестве сигнала датчика. Причем датчик (5) представляет собой датчик давления (5a), предназначенный для определения давления и/или соответствующего изменению объема изменения давления сжимаемой среды (M), находящейся в камере (6), и/или датчиком расхода, установленным в камере и предназначенным для определения связанного с изменением объема изменения количества вещества находящейся в камере (6) текучей среды. Кроме того, датчик (5) предназначен для предоставления измеренного давления и/или измеренного изменения давления, и/или измеренного изменения количества вещества в качестве измеряемого параметра и выдачи сигнала датчика. Техническим результатом заявленной группы изобретения является регистрирование и регулирование технологических параметров максимально простым и надежным способом, что обеспечивает быстрое изготовление тела путем послойного формирования с минимально возможными отходами, а также надежное обнаружение или предотвращение неисправности в производственном процессе. 2 н. и 25 з.п. ф-лы, 32 ил.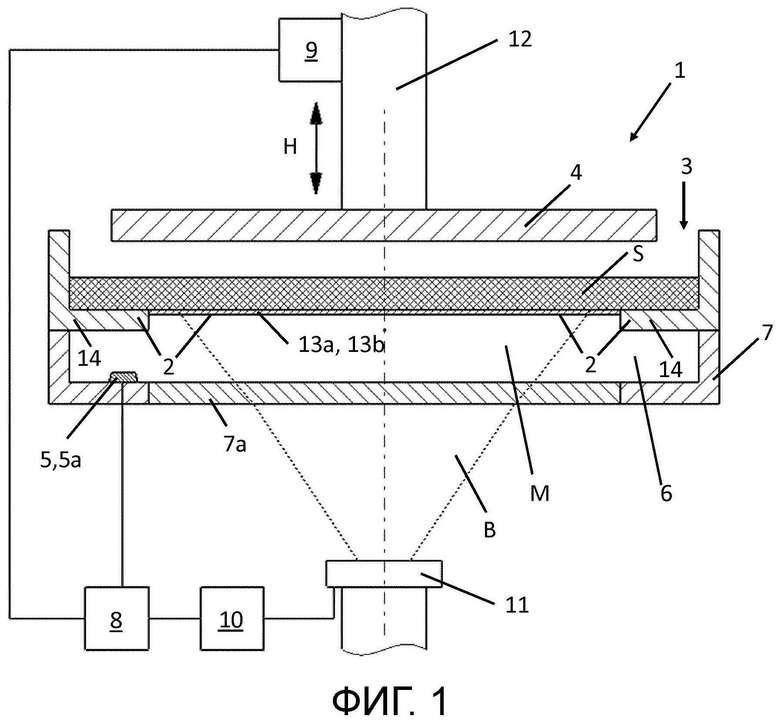
1. Устройство (1) для установки послойного формирования тела (K) из радиационно-отверждаемого материала (S), содержащее емкость (3), имеющую дно (2), для вмещения радиационно-отверждаемого материала (S), рабочую платформу (4), расположенную выше дна (2) емкости и регулируемую по высоте относительно дна (2) емкости, и взаимодействующий с дном (2) емкости датчик (5), причем дно (2) емкости по меньшей мере частично выполнено гибким, причем предусмотрена камера (6), причем камера (6) ограничена нижней стороной дна (2) емкости, причем датчик (5) предназначен для обнаружения изменения объема камеры (6) и выдачи сигнала датчика, из которого можно установить знак изменения объема, причем датчик (5) предназначен для количественного определения измеряемого параметра, который прямо или косвенно пропорционален объему камеры или изменению объема, и для предоставления его в качестве сигнала датчика, отличающееся тем, что датчик (5) представляет собой датчик давления (5a), предназначенный для определения давления и/или соответствующего изменению объема изменения давления сжимаемой среды (M), находящейся в камере (6), и/или датчиком расхода, установленным в камере и предназначенным для определения связанного с изменением объема изменения количества вещества находящейся в камере (6) текучей среды, причем датчик (5) предназначен для предоставления измеренного давления и/или измеренного изменения давления, и/или измеренного изменения количества вещества в качестве измеряемого параметра и выдачи сигнала датчика.
2. Устройство (1) по п. 1, отличающееся тем, что датчик (5) соединен с обрабатывающим модулем (8), который предназначен для обработки сигнала, выданного датчиком (5).
3. Устройство (1) по п. 2, отличающееся тем, что датчик (5) через обрабатывающий модуль (8) соединен с приводным узлом (9) для регулируемой по высоте рабочей платформы (4), и/или с блоком управления (10) источником (11) излучения, который предусмотрен для облучения радиационно-отверждаемого материала (S), и обрабатывающий модуль (8) предназначен для управления приводным узлом (9) для регулируемой по высоте рабочей платформы (4) и/или блоком управления (10) источником (11) излучения в зависимости от сигнала, предоставленного датчиком (5).
4. Устройство (1) по одному из пп. 1-3, отличающееся тем, что камера (6) соединена по меньшей мере с одним регулируемым источником (18) давления для установки давления покоя в камере (6) и/или с регулируемым нагревательным устройством (19) для установки температуры в камере (6), и/или с регулируемым источником (20) технологической среды для регулируемой подачи технологической среды (Mi) в камеру (6) для по меньшей мере локального управления процессом отверждения радиационно-отверждаемого материала (S), и/или с источником (21) воздушного потока для создания воздушного потока в камере (6).
5. Устройство (1) по пп. 2 и 4, отличающееся тем, что датчик (5) через обрабатывающий модуль (8) соединен с регулируемым источником (18) давления и/или с регулируемым нагревательным устройством (19), и/или с регулируемым источником (20) технологической среды, и/или с источником (21) воздушного потока, и обрабатывающий модуль (8) предназначен для управления источником (18) давления и/или нагревательным устройством (19), и/или источником (20) технологической среды, и/или источником (21) воздушного потока в зависимости от сигнала, предоставленного датчиком (5).
6. Устройство (1) по одному из пп. 1-5, отличающееся тем, что дно (2) емкости является по меньшей мере частично проницаемым для излучения и предпочтительно содержит гибкую натянутую пленку (13a).
7. Устройство (1) по одному из пп. 1-6, отличающееся тем, что дно (2) емкости выполнено полупроницаемым и является проницаемым для технологической среды (Mi).
8. Устройство (1) по одному из пп. 1-7, отличающееся тем, что по меньшей мере часть дна (2) емкости опирается на несущую плиту (15), по меньшей мере частично проницаемую для излучения, в частности, прозрачную.
9. Устройство (1) по п. 8, отличающееся тем, что несущая плита (15) выполнена проницаемой для технологической среды (Mp) или содержит опирающиеся на дно (2) емкости возвышения (16) для прохождения технологической среды (Mp) между возвышениями (16).
10. Устройство (1) по одному из пп. 1-9, отличающееся тем, что в емкости (3) предусмотрен перемещаемый по дну (2) емкости скребок (23).
11. Устройство (1) по п. 10, отличающееся тем, что датчик (5) через обрабатывающий модуль (8) соединен с приводным узлом (24) скребка (23), и обрабатывающий модуль (8) предназначен для управления приводным узлом (24) скребка (23) в зависимости от сигнала, предоставленного датчиком (5).
12. Устройство (1) по одному из пп. 1-11, отличающееся тем, что дно (2) емкости представляет собой открывающуюся, в частности, съемную крышку (22) корпуса (7) камеры (6).
13. Способ послойного формирования тела (K) из радиационно-отверждаемого материала (S), содержащегося в емкости (3), имеющей дно (2) емкости, согласно которому для каждого образующегося слоя (K1, …, Kn) тела (K) регулируемую по высоте относительно дна (2) емкости рабочую платформу (4) перемещают относительно дна (2) емкости над дном (2) емкости на высоту, которая определена расстоянием между рабочей платформой (4) или последним образованным слоем (Kn) тела (K) и дном (2) емкости в размере по меньшей мере толщины образующегося слоя (Kn+1) тела (K), причем радиационно-отверждаемый материал (S) для образования слоя (Kn+1) тела (K) селективно отверждают путем облучения источником (11) излучения, и регулируемую по высоте рабочую платформу (4) с присоединенным к ней отвердевшим слоем (Kn+1) тела (K) отдаляют от положения покоя дна (2) емкости, чтобы создать место для образования следующего слоя (Kn+2) между отвердевшим слоем (Kn+1) тела (K) и дном (2) емкости, причем дно (2) емкости по меньшей мере частично выполнено гибким, и датчиком (5), взаимодействующим с дном (2) емкости, измеряют по меньшей мере один технологический параметр, причем датчик (5) детектирует изменение объема камеры (6) и выдает сигнал датчика, из которого можно установить знак изменения объема, причем камера (6) ограничена нижней стороной дна (2) емкости, причем объем камеры (6) может изменяться из-за обусловленного способом отклонения дна (2) емкости от положения покоя, причем датчик (5) количественно определяет измеряемый параметр, прямо или косвенно пропорциональный объему камеры (6) или изменению объема, и выдает как сигнал датчика, отличающийся тем, что датчик (5) представляет собой датчик давления (5a) или датчик расхода (5b), причем датчиком давления (5a) в качестве измеряемого параметра определяют соответствующее изменению объема изменение давления сжимаемой среды (M) в камере (6), или датчиком расхода в качестве измеряемого параметра определяют соответствующее изменению объема изменение количества заключенной в камере (6) текучей среды.
14. Способ по п. 13, отличающийся тем, что выданный датчиком (5) сигнал обрабатывают в соединенном с датчиком (5) обрабатывающем модуле (8), и в зависимости от сигнала, выданного датчиком (5), устанавливают по меньшей мере один технологический параметр.
15. Способ по п. 14, отличающийся тем, что обрабатывающий модуль (8) сравнивает определенный и предоставленный как сигнал датчика измеряемый параметр с ожидаемым значением и/или сравнивает ход определенного измеряемого параметра с ходом ожидаемого значения и в зависимости от разницы между измеряемым параметром и ожидаемым значением и/или между ходом измеряемого параметра и ходом ожидаемого значения устанавливает по меньшей мере один технологический параметр.
16. Способ по п. 14, отличающийся тем, что изменения определенного датчиком (5) и выданного как сигнал датчика измеряемого параметра обрабатывают в соединенном с датчиком (5) обрабатывающем модуле (8) по имитационной модели ожидаемых значений процесса изготовления, и по меньшей мере один технологический параметр устанавливают в зависимости от по меньшей мере одного измеренного значения измеряемого параметра и/или изменения измеренных значений в соответствии с заданной величиной имитационной модели.
17. Способ по п. 15, отличающийся тем, что ожидаемое значение и/или несколько ожидаемых значений рассчитывают обрабатывающим модулем (8) в зависимости от по меньшей мере одного технологического параметра.
18. Способ по п. 16, отличающийся тем, что имитационная модель в качестве входного значения учитывает по меньшей мере один установленный технологический параметр.
19. Способ по одному из пп. 14-18, отличающийся тем, что на основе сигнала, полученного от датчика (5), в обрабатывающем модуле (8) в качестве технологического параметра определяют высоту рабочей платформы (4) и/или последнего отвердевшего слоя (Kn) тела (K) относительно положения покоя дна (2) емкости, и/или скорость перемещения рабочей платформы (4), и/или величину площади последнего отвердевшего слоя (Kn) тела (K), когда дно (2) емкости из-за движения рабочей платформы (4) отклоняется от положения покоя.
20. Способ по одному из пп. 14-19, отличающийся тем, что в зависимости от сигнала, предоставленного датчиком (5), с помощью обрабатывающего модуля (8) в качестве технологического параметра регулируют высоту рабочей платформы (4) посредством связанного с ней и с обрабатывающим модулем (8) приводного узла (9) для рабочей платформы (4), и/или регулируют облучение радиационно-отверждаемого материала (S) посредством связанного с обрабатывающим модулем (8) и источником (11) излучения блока управления (10) источником (11) излучения.
21. Способ по одному из пп. 14-20, отличающийся тем, что в зависимости от сигнала, предоставленного датчиком (5), с помощью обрабатывающего модуля (8) в качестве технологического параметра устанавливают давление покоя в камере (6) посредством по меньшей мере одного связанного с камерой (6) и обрабатывающим модулем (8) регулируемого источника (18) давления, и/или температуру в камере (6) посредством по меньшей мере одного связанного с камерой (6) и обрабатывающим модулем (8) регулируемого нагревательного устройства (19), и/или подачу технологической среды (Mp) в камеру (6) посредством по меньшей мере одного связанного с камерой (6) и обрабатывающим модулем (8) регулируемого источника (20) технологической среды, и/или воздушный поток в камере (6) посредством по меньшей мере одного связанного с камерой (6) и обрабатывающим модулем (8) источника (21) воздушного потока.
22. Способ по одному из пп. 14-21, отличающийся тем, что из сигнала, предоставленного датчиком (5), в обрабатывающем модуле (8) в качестве технологического параметра устанавливают отделение от дна (2) емкости последнего отвердевшего и присоединенного ко дну (2) емкости слоя (Kn) тела (K), и/или высоту отделения, и/или скорость отделения от дна (2) емкости последнего отвердевшего и присоединенного ко дну (2) емкости слоя (Kn) тела (K), и/или контакт с дном (2) емкости, и/или прижимное усилие, оказываемое на дно (2) емкости движущимся в емкости (3) скребком (23), и/или ошибочное отделение тела (K) от рабочей платформы (4), и/или старение емкости, и/или неожиданное прилипание тела (K) ко дну (2) емкости при подаче ингибирующей среды (Mi) в камеру (6) и к радиационно-отверждаемому материалу (S), и/или уровень заполнения емкости (3) радиационно-отверждаемым материалом (S), и/или приведение емкости (3) в состояние готовности, и/или трещину или дыру в дне (2) емкости или в камере (6).
23. Способ по одному из пп. 14-22, отличающийся тем, что в зависимости от сигнала, предоставленного датчиком (5), с помощью обрабатывающего модуля (8) для отделения от дна (2) емкости последнего отвердевшего и присоединенного ко дну (2) емкости слоя (Kn) тела (K), в частности, когда регулируемая по высоте рабочая платформа (4) отдаляется от положения покоя дна (2) емкости, устанавливают в камере (6) пониженное давление, отклоняющее дно (2) емкости от рабочей платформы (4).
24. Способ по одному из пп. 14-23, отличающийся тем, что, предпочтительно в зависимости от сигнала, предоставленного датчиком (5), с помощью обрабатывающего модуля (8) перед контактом рабочей платформы (4) или последнего отвердевшего слоя (Kn) тела (K) с дном (2) емкости устанавливают в камере (6) избыточное давление, отклоняющее дно (2) емкости к рабочей платформе (4).
25. Способ по одному из пп. 14-24, отличающийся тем, что регулируемую по высоте рабочую платформу (4) с присоединенным к ней и дну (2) емкости последним отвердевшим слоем (Kn) тела (K) отдаляют от положения покоя дна (2) емкости, отделение от дна (2) емкости последнего отвердевшего и присоединенного ко дну (2) емкости слоя (Kn) тела (K) устанавливают в обрабатывающем модуле (8) посредством датчика (5), регулируемую по высоте рабочую платформу (4) перемещают выше положения покоя дна (2) емкости на высоту (Zx+1), которая определена как расстояние между последним отвердевшим слоем (Kn) тела (K) и положением покоя дна (2) емкости в размере по меньшей мере толщины нового образующегося слоя (Kn+1) тела (K), и затем радиационно-отверждаемый материал (S) селективно отверждают путем облучения источником (11) излучения с образованием нового слоя (Kn+1) тела (K).
26. Способ по одному из пп. 14-25, отличающийся тем, что ингибирующую среду (Mi) подают через камеру (6) к радиационно-отверждаемому материалу (S), и регулируемую по высоте рабочую платформу (4) с присоединенным к ней последним отвердевшим слоем (Kn) тела (K) перемещают выше положения покоя дна (2) емкости на высоту (Zx+1), которая определена как расстояние между последним отвердевшим слоем (Kn) тела (K) и положением покоя дна (2) емкости по меньшей мере в размере толщины нового образующегося слоя (Kn+1) тела (K), и одновременно с перемещением регулируемой по высоте рабочей платформы (4) радиационно-отверждаемый материал (S) селективно отверждают путем облучения источником (11) излучения с образованием нового слоя (Kn+1) тела (K).
27. Способ по одному из пп. 14-26, отличающийся тем, что ингибирующую среду (Mi) подают через камеру (6) к радиационно-отверждаемому материалу (S), и регулируемую по высоте рабочую платформу (4) с присоединенным к ней последним отвердевшим слоем (Kn) тела (K) перемещают выше положения покоя дна (2) емкости на высоту (Zx+1), которая определена как расстояние между последним отвердевшим слоем (Kn) тела (K) и положением покоя дна (2) емкости по меньшей мере в размере толщины нового образующегося слоя (Kn+1) тела (K), и затем радиационно-отверждаемый материал (S) для образования нового слоя (Kn+1) тела (K) селективно отверждают путем облучения источником (11) излучения.
| US 2018194080 A1, 12.07.2018 | |||
| Исполнительный орган проходческого комбайна | 1974 |
|
SU518566A2 |
| US 2015064298 A1, 05.03.2015 | |||
| WO 2017106895 A1, 29.06.2017 | |||
| WO 2012073674 A1, 07.06.2012. | |||

