Изобретение относится к устройствам, предназначенным для очистки поверхностей, в частности для чистки внутренних поверхностей труб или систем трубопроводов, путем механического воздействия потока текучей среды, например, сильным напором струи с использованием устройств, введенных в трубы и движущихся вдоль них.
Очистка труб теплообменных агрегатов производится для удаления солей, выпадающих из воды и отлагающихся на стенках барабанов, коллекторов и труб. Выпадение солей происходит при нагревании и испарении воды, причем в некоторых случаях выпадающие соли равномерно покрывают внутренние стенки плотной и трудноотделимой коркой, которая называется накипью. В котлах встречается твердая, вязкая и рыхлая накипь. Наиболее опасной является вязкая накипь, обладающая низкой теплопроводностью. Наличие слоя накипи и загрязнений затрудняет теплопередачу от газов к воде. В некоторых случаях слой накипи толщиной 0,2 мм может вызвать недопустимый перегрев стенок труб, вызывающий пережог металла. На внутренней поверхности экранных труб котлов высокого давления, особенно в зоне максимальных тепловых напряжений, появляются отложения накипи, которые могут привести к появлению свищей и к развитию интенсивной подшламовой коррозии, чаще всего около сварных соединений.
Известны комплексы гидродинамической очистки внутренней поверхности труб теплообменных агрегатов от накипи, органических и химических отложений (US20190163207, US20200356117, US20150068563, US20140336828, US20140336827, US20160129552, US10040169, US20140333525, US9605915, US20100300498, US10265834, US20140336793, RU2641277), основанных на введении различных чистящих устройства в полости теплообменных труб.
Наиболее близким по назначению и эффективности очистки труб теплообменных агрегатов от накипи, органических и химических отложений является автоматизированный комплекс гидродинамической очистки поверхностей, описанный в патенте (US20150068563, 2015 г.). Устройство для гидродинамической очистки состоит из штанги, вводимой в трубу теплообменного агрегата с помощью системы подачи штанги, соединённой с насосом высокого давления и системы двухкоординатного продольного и поперечного перемещения штанги от двух приводов, управляемой дистанционно оператором комплекса. Очистка осуществляется путем подачи жидкой среды от насоса высокого давления через отверстие штанги вводимой системой подачи штанги в трубу теплообменного агрегата. Перемещение штанги между различными трубами теплообменного агрегата осуществляется оператором дистанционно с помощью системы двухкоординатного перемещения.
Недостатком известного устройства является невысокая производительность гидродинамической очистки внутренней поверхности труб вследствие отсутствия обратной связи о качестве очистки после прохода штанги вдоль поверхности трубы теплообменного агрегата, поскольку устройство не содержит какие-либо системы, позволяющие прямо или косвенно оценить качество очистки по измеряемым данным в процессе очистки. Данный недостаток является существенным поскольку даже неоднократное перемещения штанги вдоль трубы теплообменного агрегата с соответствующим гидродинамическим воздействием не приводит к полному удалению накипи или отложений, что может повлечь повреждение теплообменного агрегата при его дальнейшей эксплуатации. Дополнительным недостатком является необходимость ручного управления оператором системой перемещения штанги между трубами теплообменного агрегата, что влечет за собой увеличение времени очистки, а также риск пропуска отдельных труб теплообменного агрегата.
Проблемой, на которую направлено изобретение, является автоматизация процесса гидродинамической очистки труб теплообменного агрегата с одновременным автоматическим контролем качества указанной очистки.
Техническим результатом изобретения является повышение производительности и качества гидродинамической очистки внутренней поверхности труб теплообменных агрегатов на основе автоматизированного комплекса гидродинамической очистки с обратной связью по качеству очистки.
Поставленная проблема и заявленный технический результат достигаются тем, что комплекс гидродинамической очистки внутренней поверхности труб теплообменного агрегата содержит шланг высокого давления и насосную станцию. Согласно изобретению комплекс дополнительно содержит электромеханический робот очистки с числовым программным управлением, выдвижная пустотелая штанга которого выполнена из упругого материала и соединена по входу через шланг высокого давления с выходом насосной станции. Электромеханический робот очистки содержит цифровой блок управления, механизмы двухкоординатного продольного и поперечного перемещения штанги от приводов соответствующих реверсивных электродвигателей с возможностью ее позиционирования, а также дифференциальный датчик местоположения штанги и скорости её движения соединенный по сигнальному выходу с сигнальным входом электромеханического робота очистки, управляющие выходы которого соединены с управляющими входами соответствующих реверсивных электродвигателей.
Для возможности автоматизированной очистки труб цифровой блок управления выполнен в виде контроллера или микроЭВМ. Цифровой блок управления снабжён цифровой картой труб теплообменного агрегата, программой управления выдвижной пустотелой штанги в поперечной и продольной плоскости на основе цифровой карты, а также программой оценки чистоты полости труб теплообменного агрегата на основе данных дифференциального датчика о снижении скорости продольного движения штанги при пониженной её проходимости в зоне повышенного загрязнения труб теплообменного агрегата.
Введение электромеханического робота очистки, снабжение его выдвижной пустотелой штангой для возвратно-поступательного перемещения в каналах труб теплообменного агрегата, снабжение его дифференциальным датчиком движения выдвижной пустотелой штанги, а также – цифрового блока управления с программой определения места загрязнения каналов труб теплообменного агрегата по данным датчика движения, позволяет автоматизировать процесс гидродинамической очистки труб теплообменного агрегата, с одновременным контролем качества указанной очистки, а также исключить необходимость остановки процесса очистки труб, а за счет реверсивной тяги выдвижной пустотелой штанги обеспечить повторную очистку места загрязнения.
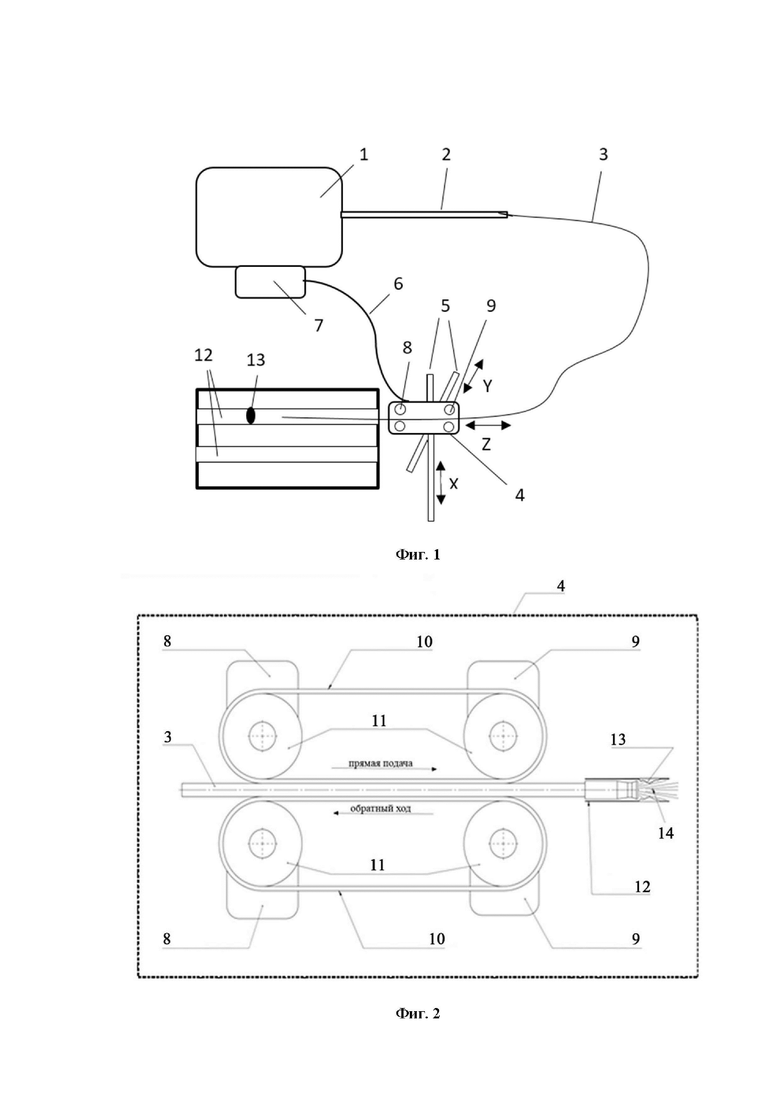
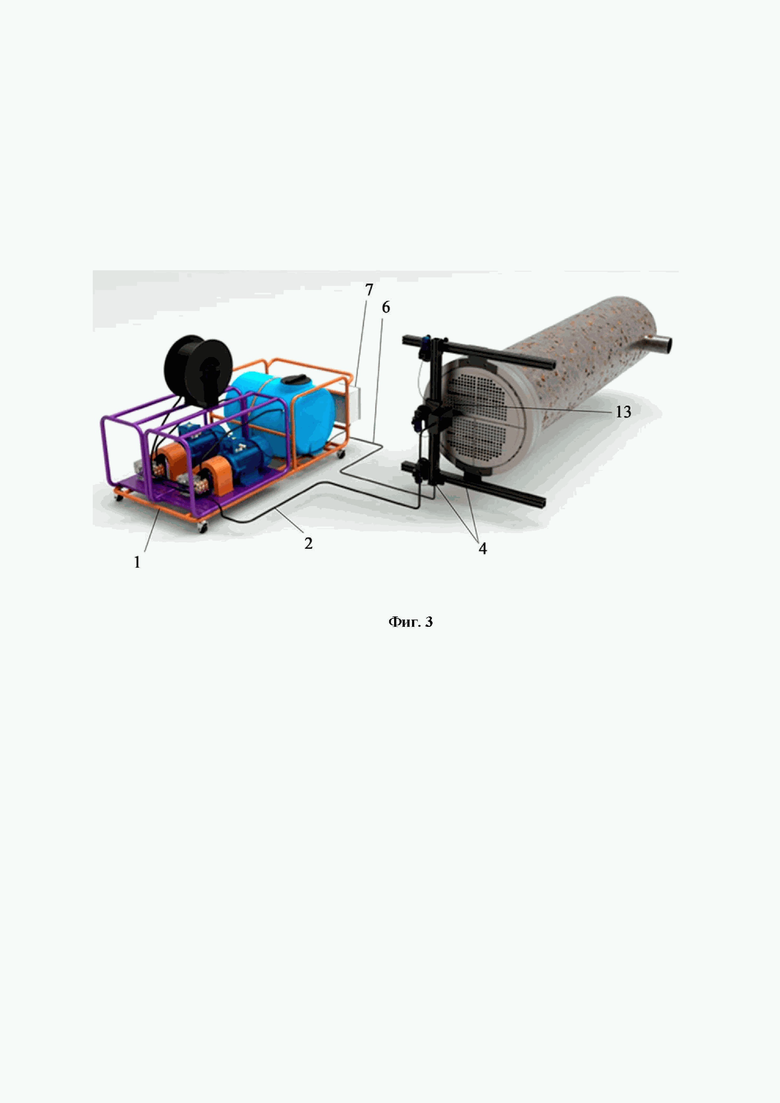
Сущность комплекса гидродинамической очистки внутренней поверхности труб теплообменного агрегата иллюстрируется следующими рисунками, где на фиг. 1 представлена функциональная схема автоматизированного комплекса гидродинамической очистки труб с цифровым блоком управления; на фиг. 2 – механизм продольного возвратно-поступательного перемещения выдвижной пустотелой штанги, оснащенного реверсивным электродвигателем и дифференциальным датчиком местоположения штанги и скорости её движения; на фиг. 3 – фотография экспериментального образца комплекса гидродинамической очистки, соединенного с трубами теплообменного агрегата.
На чертежах позициями обозначено:
1 – насосная установка высокого давления, генерирующая напор воды с давлением 180-500 бар и расходом 12-40 литров в минуту. Установка приводится в действие электрическим мотором (на фигуре не показано).
Электромеханический робот очистки включает:
2 – шланг высокого давления, передающий поток жидкости под высоким давлением. Шланг имеет длину до 80 метров;
3 – выдвижная пустотелая штанга, в виде полужесткого шланга, из упругого материала длинной до 15 метров, подсоединенная к шлангу 2 высокого давления и предназначенная для непосредственной очистки труб путем введения штанги в трубу теплообменного агрегата;
4 – механизм продольного обратно-поступательного перемещения штанги 3 вдоль оси Z;
5 – механизм двухкоординатного перемещения и позиционирования выдвижной пустотелой штанги по осям X и Y;
6 – канал обратной связи в виде сигнального кабеля;
7 – цифровой блок управления, в виде управляющего контроллера или микроЭВМ, монтируется на насосной установке 1 и представляет собой промышленный компьютер с программой управления, обеспечивающий перемещение выдвижной пустотелой штанги 3 на расстояние по заданной программе, осуществляющий контроль скорости перемещения с помощью датчиков перемещения;
8 – дифференциальные датчики перемещения выдвижной пустотелой штанги 3, передающие сигналы по кабелю 6 обратной связи в цифровой блок 7 управления, контролирующие по заданной программе перемещение выдвижной пустотелой штанги 3;
9 – электродвигатели перемещения, обеспечивающие по заданной программе линейное перемещение выдвижной пустотелой штанги 3;
10 – приводной ремень механизма 5 продольного обратно-поступательного перемещения;
11 – направляющие ролики, по которым производится перемещение выдвижной пустотелой штанги 3;
12 – очищаемая труба теплообменного агрегата;
14 – место засора;
14 – область гидродинамического воздействия.
Механизмы 4 и 5 двухкоординатного продольного и поперечного перемещения выдвижной пустотелой штанги 3 от приводов реверсивных электродвигателей 9 перемещения, а также дифференциальный датчик 8 перемещения и скорости её движения соединены по сигнальному выходу с цифровым блоком 7 управления.
Комплекс гидродинамической очистки внутренней поверхности труб теплообменного агрегата работает следующим образом.
Перед началом работ производят первичное программирование системы с учетом числа очищаемых труб 12, а также их геометрического расположения. Также программируют уровень допустимых остаточных загрязнений на поверхности труб 12 (количество, протяжённость, глубина слоя загрязнений). Комплекс в работу запускает управляющая программа цифрового блока 7 управления. Механизм 4 продольного обратно-поступательного перемещения осуществляет перемещение выдвижной пустотелой штанги 3 вдоль очищаемой трубы 12. Механизм 5 двухкоординатного перемещения осуществляет перемещение выдвижной пустотелой штанги от одной трубы 12 к другой. При обнаружении места 13 засора остаточных загрязнений, величина которых превышает допустимую, с определением глубины каждого места 13 засора и её протяжённости, подается сигнал от дифференциальных датчиков 8 перемещения по каналу 6 обратной связи на цифровой блок 7 управления, который подает сигнал реверсивным электродвигателям 9 перемещения для возвратно-поступательного перемещения штанги 3 на заданное расстояние при помощи механизма 4 и повторного перемещения штанги 3 к обнаруженному месту 13 засора для повторного гидродинамического воздействия на место 13 засора. При замедлении скорости подачи штанги 3 менее установленного порога, программа цифрового блока 7 управления запускает алгоритм повторной очистки.
Возможность контроля за проведением очистки труб теплообменного агрегата повышает производительность очистки за счет возможности своевременного повторного гидродинамического воздействия на место засора, без остановки запущенного процесса.
В настоящее время комплекс гидродинамической очистки внутренней поверхности труб теплообменного агрегата находится на стадии пилотных испытаний на предприятиях потенциальных заказчиков.
Изобретение относится к устройствам, предназначенным для чистки внутренних поверхностей труб. Комплекс гидродинамической очистки внутренней поверхности труб теплообменного агрегата содержит шланг высокого давления, насосную станцию и электромеханический робот очистки с цифровым блоком программного управления, включающий выдвижную пустотелую штангу, выполненную из упругого материала, по входу соединенную с выходом насосной станции, а по выходу - со шлангом высокого давления, механизмы двухкоординатного продольного и поперечного обратно-поступательного перемещения штанги от приводов соответствующих электродвигателей с возможностью ее позиционирования, а также дифференциальный датчик местоположения штанги и скорости её перемещения, соединенный по сигнальному выходу с сигнальным входом электромеханического робота очистки, управляющие выходы которого соединены с управляющими входами соответствующих электродвигателей. Техническим результатом изобретения является повышение производительности и качества гидродинамической очистки внутренней поверхности труб теплообменных агрегатов на основе автоматизированного комплекса гидродинамической очистки с обратной связью по качеству очистки. 2 з.п. ф-лы, 3 ил.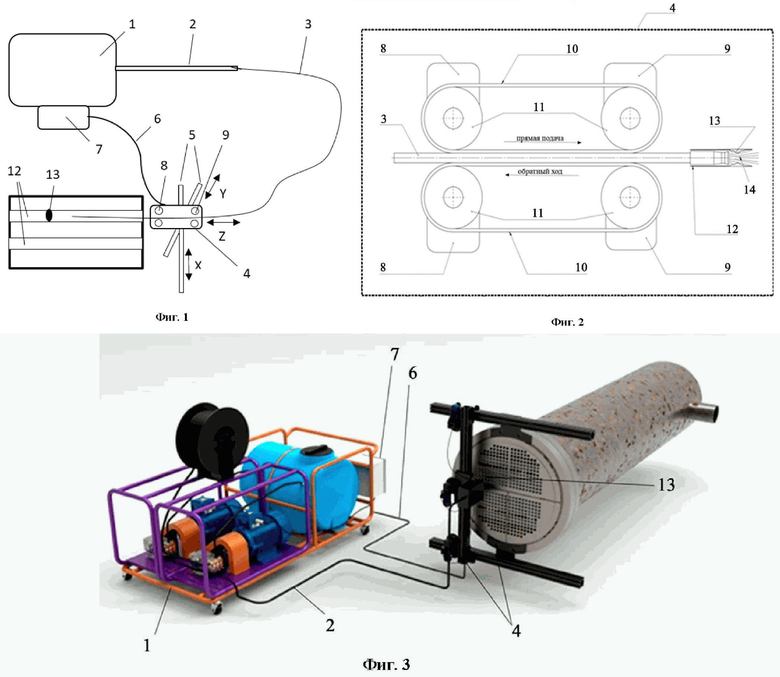
1. Комплекс гидродинамической очистки внутренней поверхности труб теплообменного агрегата, содержащий шланг высокого давления и насосную станцию, отличающийся тем, что он дополнительно содержит электромеханический робот очистки с цифровым блоком программного управления, включающий выдвижную пустотелую штангу, которая выполнена из упругого материала и соединена по входу через шланг высокого давления с выходом насосной станции, механизмы двухкоординатного продольного и поперечного обратно-поступательного перемещения штанги от приводов соответствующих электродвигателей с возможностью ее позиционирования, а также по крайней мере один дифференциальный датчик местоположения штанги и скорости её перемещения, соединенный по сигнальному выходу с сигнальным входом электромеханического робота очистки, управляющие выходы которого соединены с управляющими входами соответствующих электродвигателей.
2. Комплекс по п. 1, отличающийся тем, что цифровой блок программного управления выполнен в виде контроллера или микроЭВМ, снабжён цифровой картой труб теплообменного агрегата, программой управления выдвижной пустотелой штанги в поперечной и продольной плоскости на основе цифровой карты.
3. Комплекс по п. 1, отличающийся тем, что цифровой блок программного управления выполнен в виде контроллера или микроЭВМ, снабжён программой оценки чистоты полости труб теплообменного агрегата на основе данных дифференциального датчика о снижении скорости продольного перемещения штанги при пониженной проходимости штанги в зоне повышенного загрязнения труб теплообменного агрегата.
| US 2015068563 A1, 12.03.2015 | |||
| МОБИЛЬНОЕ УСТРОЙСТВО ДЛЯ ПРОМЫВКИ ОТОПЛЕНИЯ И ВОДОСНАБЖЕНИЯ | 2008 |
|
RU2385443C1 |
| Способ очистки внутренней поверхности труб | 1984 |
|
SU1315037A1 |
| Способ гидродинамической очистки внутренней поверхности технологических трубопроводов нефте- и нефтепродуктоперекачивающих станций | 2017 |
|
RU2689629C2 |
| US 20190163207 A1, 30.05.2019 | |||
| US 20200356117 A1, 12.11.2020. | |||

