Изобретение относится к устройствам, предназначенным для очистки поверхностей, в частности, для чистки внутренних поверхностей труб или систем трубопроводов, путем механического воздействия потока текучей среды, например, сильным напором струи с использованием устройств, введенных в трубы и движущихся вдоль них.
Очистка труб теплообменных агрегатов производится для удаления солей, выпадающих из воды и отлагающихся на стенках барабанов, коллекторов и труб. Выпадение солей происходит при нагревании и испарении воды, причем в некоторых случаях выпадающие соли равномерно покрывают внутренние стенки плотной и трудноотделимой коркой, которая называется накипью. Образование накипей на внутренних поверхностях трубок снижает их теплопередачу и замедляет скорость проходящей через трубки жидкости.
Используемые роботизированные комплексы выполняют позиционирование очистного устройства вдоль оси очищаемой трубки, выполняют подачу очистного устройства, производящего очистку, по всей длине очищаемой трубки с последующим возвратом очистного устройства в исходную позицию, выполняют перемещение очистного устройства к следующей трубке теплообменного агрегата для выполнения следующей очистки трубки. Перемещение и позиционирование очистного устройства выполняется роботизированным комплексом в ручном режиме управления по команде оператора, в программном режиме управления по командам управляющей программы.
Известны роботизированные устройства гидродинамической или микрогидроударной очистки внутренней поверхности труб теплообменных агрегатов от накипи, органических и химических отложений (патенты US 9605915 B2, US 10040169 B2, US 20100300498 A1, US 20150068563 A1, RU 2641277, RU 2771538, US 20190163207 A1, US 20200356117 A1, US 4438805), с различными способами последовательного введения устройств очистки в полости теплообменных труб, их последующего перемещения и позиционирования, а также на различных способах управления работой комплексов.
Наиболее близким к заявленному изобретению относится комплекс гидродинамической очистки внутренней поверхности труб теплообменного агрегата (RU 2771538 кл. F28G 1/16; F28G 15/02; F28G 15/06; F28G 15/08; B08B 3/02; B08B 9/043; C23G 3/04, 2022), содержащий подвижную насадку гидродинамического очистителя, шланг высокого давления и насосную станцию. Комплекс также содержит электромеханический робот очистки с числовым программным управлением, выдвижная пустотелая штанга которого выполнена из упругого материала и соединена по входу через шланг высокого давления с выходом насосной станции. Электромеханический робот очистки содержит цифровой блок управления, механизмы двухкоординатного продольного и поперечного перемещения штанги от приводов соответствующих реверсивных электродвигателей с возможностью ее позиционирования, а также - дифференциальный датчик местоположения штанги, соединенный по сигнальному выходу с сигнальным входом электромеханического робота очистки, управляющие выходы которого соединены с управляющими входами соответствующих реверсивных электродвигателей. Цифровой блок управления роботом снабжен цифровой картой труб теплообменного агрегата, программой управления выдвижной пустотелой штанги в поперечной и продольной плоскости на основе цифровой карты, что позволяет управлять роботом в ручном или программном режиме.
Недостатком известного комплекса является невысокая производительность операций очистки внутренней поверхности труб, из-за необходимости управления роботизированным устройством в ручном режиме с управлением оператором или в программном режиме на основе заданной цифровой карты расположения торцов трубных отверстий. Данный недостаток является существенным, поскольку управление в ручном режиме требует квалификации оператора и тщательного контроля выполнения операций, кроме того, управление в программном режиме требует время на формирование цифровой карты расположения торцов трубных отверстий, высокой квалификации оператора, а также необходимость тщательного контроля выполнения операций, что влечет за собой увеличение времени выполнения операций и риск пропуска отдельных труб теплообменного агрегата.
Проблемой, на которую направлено изобретение, является создание автоматического устройства очистки внутренних поверхностей труб теплообменного агрегата, в котором устранены недостатки, присущие прототипу.
Техническим результатом изобретения является повышение производительности и качества гидродинамической очистки внутренней поверхности труб теплообменных агрегатов.
Технический результат достигается за счет того, что автоматическое устройство очистки внутренних поверхностей труб теплообменного агрегата содержит насосную станцию с цифровым блоком программного управления, снабженного программой управления выдвижной пустотелой штанги в поперечной и продольной плоскости на основе цифровой карты труб, электромеханический робот очистки, управляющие выходы которого соединены с управляющими входами соответствующих электродвигателей механизмов двухкоординатного продольного и поперечного обратно - поступательного перемещения штанги с возможностью ее позиционирования, а также шланг высокого давления, связанный с насосной станцией, на конце которого закреплена выдвижная пустотелая штанга с очистным наконечником. Согласно изобретению с торцевой части теплообменного агрегата дополнительно смонтированы по крайней мере один осветитель и видеокамера, поле зрения которой охватывает торцевую часть теплообменного агрегата. Видеокамера связана с цифровым блоком программного управления каналом обратной связи через блок преобразования сигналов механизмов двухкоординатного продольного и поперечного обратно - поступательного перемещения штанги. Цифровой блок программного управления дополнительно снабжен программой распознавания трубных отверстий на торцевой части теплообменного агрегата для построения карты труб теплообменного агрегата.
Количество эффективных пикселей видеокамеры преимущественно составляет не менее 3,5 миллиона с разрешением 2048 х 1536 пикселей при частоте 20 кадров в секунду, а объектив камеры выполнен с фокусным расстоянием от 2,8 до 11 мм и с диафрагмой 1:1,4 и глубиной фокусировки от 0,1 м.
Видеокамера соединена кабелем c блоком преобразования сигналов, формирующим видеосигнал в интерфейс данных Ethernet для передачи в цифровой блок управления для обработки.
Для обеспечения необходимой яркости и контрастности, осветитель выполнен светодиодным с возможностью формирования светового потока яркостью не менее 300 лм и цветовой температурой от 4000 до 4500К.
Цифровая карта труб теплообменного агрегата включает геометрию расположения труб на торцевой части теплообменного агрегата, информацию о диаметрах отверстий, координатах центров отверстий и расстояниях между центрами отверстий путем попиксельного измерения.
Цифровой блок программного управления включает программу преобразования массива данных о диаметрах отверстий труб, координатах центров отверстий и расстояниях между центрами отверстий в управляющие сигналы для двухкоординатного движения очистной насадки для ее точного позиционирования по оси очищаемой трубы и для перемещения очистной насадки между трубами.
Цифровой блок программного управления выполнен в виде контроллера или микро-ЭВМ и дополнительно снабжен экраном для отображения цифрового массива отверстий труб, массива данных о диаметрах отверстий труб, координатах центров отверстий труб и расстояниях между центрами для возможности выбора оператором отверстия трубы для начала очистки.
Наличие с торцевой части теплообменного агрегата осветителя и видеокамеры, поле зрения которой охватывает торцевую часть теплообменного агрегата, повышает точность выбора трубы подлежащей очистке, а также обеспечивает контроль качества выполнения операции по очистке труб.
Связь видеокамеры с цифровым блоком программного управления каналом обратной связи через блок преобразования сигналов механизмов двухкоординатного продольного и поперечного обратно-поступательного перемещения штанги обеспечивает возможность контроля за проведением операции очистки внутренней поверхности труб, что значительно влияет на качество очистки, исключая повторную операцию, а, следовательно, также влияет и на производительность процедуры очистки теплообменных труб.
Наличие у цифрового блока программного управления программы распознавания отверстий труб на торцевой части теплообменного агрегата, значительно повышает производительность устройства, за счет возможности получения карты труб теплообменного агрегата, обеспечивающей точность работы, на прямую влияющей на производительность, т.к. не требуется повторных операций на доочистку труб. В частных случаях реализации устройства программа распознавания отверстий труб может быть выполнена в виде программы нейросетевого распознавания, обученной на снимках теплообменных агрегатов, программы компьютерного зрения (например, свидетельство RU 2022668724, RU 2016613345), программы анализа визуальных данных (например, свидетельство RU 2021669445), программы выделения контуров (например, свидетельства RU 2020614770, RU 2022663530, RU 2021669001, RU 2014616138). Для повышения точности распознавания отверстий труб на торцевой части теплообменного агрегата цифровой блок программного управления может быть снабжен несколькими программами распознавания отверстий труб, имеющими различное исполнение.
Количество эффективных пикселей видеокамеры преимущественно составляет не менее 3,5 миллиона с разрешением не менее 2048 × 1536 пикселей при частоте 20 кадров в секунду. Эффективное число пикселей, разрешение изображения и частота кадров влияют на точность распознавания отверстий труб, а также на количество ошибок при определении координат центров отверстий труб и расстояния между центрами отверстий труб путем подсчета числа пикселей между осями отверстий. При уменьшении разрешения и частоты кадров возникают ошибки в точности распознавания и определения координат центров отверстий труб и расстояний между ними. При существенном увеличении разрешения и частоты кадров возрастает объем обрабатываемой информации и увеличивается время обработки изображения.
Выполнение объектива камеры с фокусным расстоянием от 2,8 до 11 мм и с диафрагмой 1:1,4 и глубиной фокусировки от 0,1 м. Величина фокусного расстояния в указанном диапазоне позволяет позиционировать торцевую часть теплообменного агрегата диаметром от 400 до 1500 мм целиком в поле зрения камеры без изменения ее положения. Величина диафрагмы в указанном значении обеспечивает резкость изображения, достаточную для распознавания отверстий труб и определения координат центров отверстий труб и расстояний между центрами отверстий труб. Уменьшение величины диафрагмы менее 1:1,4 приведет к уменьшению светового потока и снижению резкости изображения, что потребует дополнительного освещения. Уменьшение глубины фокусировки менее 0,1 м вызывает ошибки распознавания, связанные с неточной фокусировкой, и потребует дополнительного времени на точную подстройку фокуса объектива.
Для обеспечения необходимой яркости и контрастности, осветитель выполнен светодиодным с возможностью формирования светового потока яркостью не менее 300 лм и цветовой температурой от 4000 до 4500К. Указанное значение яркости является минимально достаточным для обеспечения контрастности изображения, необходимой для качественного распознавания отверстий труб, координат центров отверстий труб и расчета расстояния между центрами отверстий труб. Указанное значение цветовой температуры наиболее близко к естественному освещению. Снижение уровня яркости, менее указанного, в условиях недостаточной освещенности и частичного затенения объекта вызывает существенное снижение качества распознавания отверстий труб. Изменение цветовой температуры светового потока в более теплую или холодную стороны вызывает нарушение контрастности объекта и также приводит к существенному снижению качества распознавания отверстий труб.
Наличие цифровой карты труб теплообменного агрегата с геометрией расположения труб на торцевой части теплообменного агрегата, информацией о диаметрах отверстий, координатах центров отверстий и расстояниях между центрами отверстий путем попиксельного измерения, повышает точность позиционирования очистного наконечника, а, следовательно, повышает производительность очистки труб.
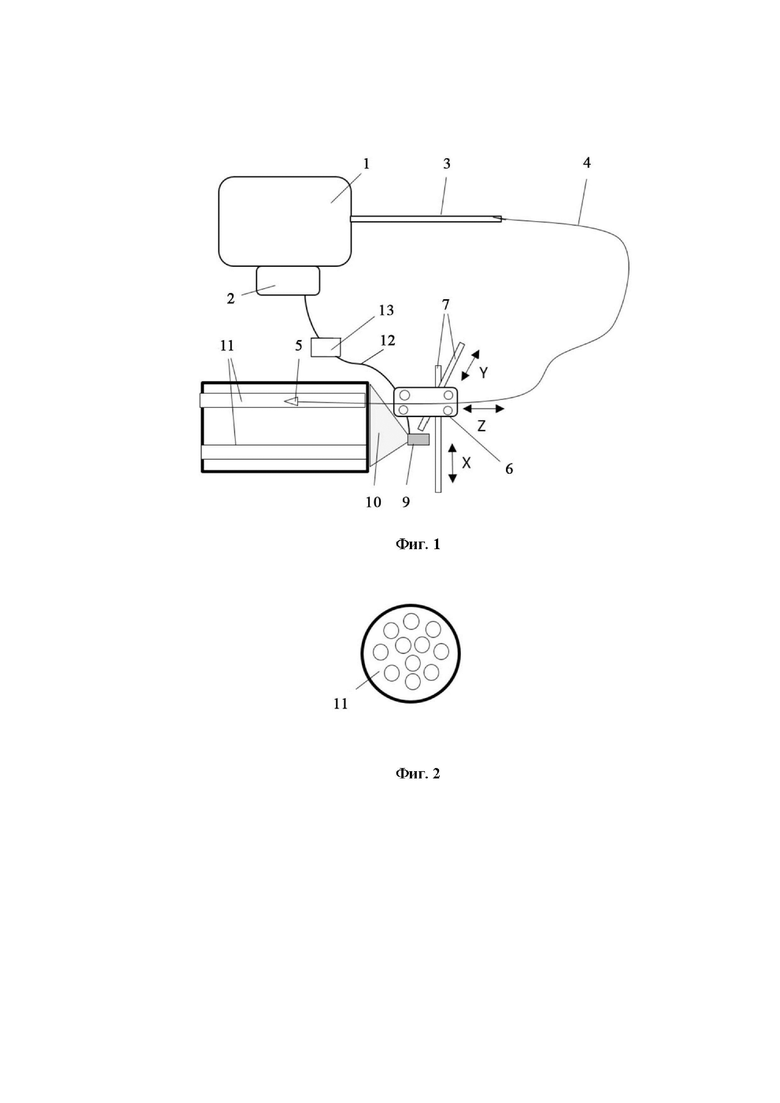
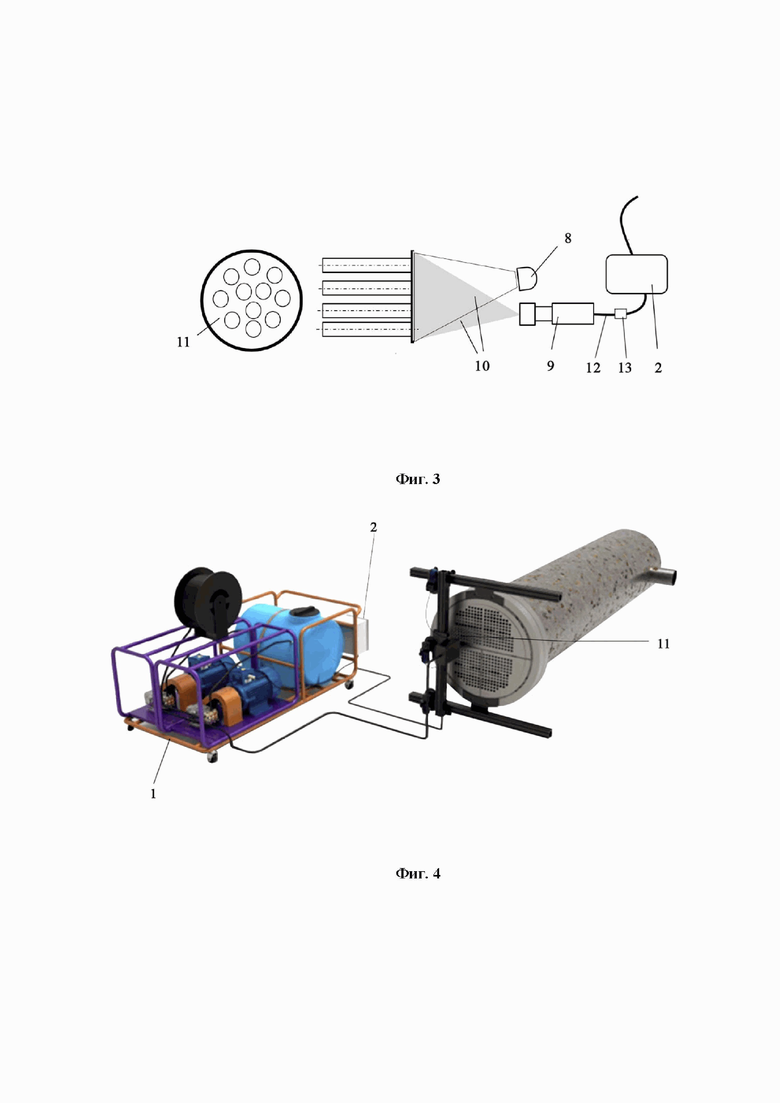
Автоматическое устройство очистки внутренних поверхностей труб теплообменного агрегата иллюстрируется следующими рисунками, где: на фиг.1 представлена функциональная схема работы устройства; на фиг.2 - схема расположения трубных отверстий на торцевой части теплообменного агрегата; на фиг.3 - осветитель и видеокамера с торцевой части теплообменного агрегата; на фиг.4 - фотография экспериментального образца автоматического устройства очистки внутренних поверхностей труб теплообменного агрегата.
Автоматическое устройство очистки внутренних поверхностей труб теплообменного агрегата включает:
1 - насосная станция высокого давления, генерирующая напор воды с давлением 180-500 бар и расходом 12-40 литров в минуту, приводимая в действие электрическим мотором (на фиг. не показано).
2 - цифровой блок программного управления, в виде управляющего контроллера или микро-ЭВМ с программой управления выдвижной пустотелой штанги в поперечной и продольной плоскости, снабженный программой распознавания отверстий труб на торцевой части теплообменного агрегата, монтируется на насосной станции 1;
3 - шланг высокого давления;
4 - выдвижная пустотелая штанга, в виде полужесткого шланга, из упругого материала длиной до 15 метров,
5 - наконечник очистки накипи, преобразующая поток жидкости высокого давления в распыляемый конус, производящий очистку засоров и отложений на внутренних поверхностях труб;
6 - электродвигатель механизма обратно - поступательного перемещения выдвижной пустотелой штанги 3 по оси Z;
7 - электродвигатели механизма двухкоординатного поперечного перемещения и позиционирования выдвижной пустотелой штанги 4 по осям X и Y;
8 - осветитель;
9 - видеокамера;
10 - поле зрения видеокамеры;
11 - трубные отверстия торцевой части теплообменного агрегата;
12 - канал обратной связи, в виде сигнального кабеля;
13 - блок преобразования сигналов электродвигателей 6 и 7;
Автоматическое устройство очистки внутренних поверхностей труб теплообменного агрегата работает следующим образом.
Перед началом работ производится регулировка равномерного освещения торцевой части теплообменного агрегата 11 с помощью установки осветителя 8, а также первичная калибровка попиксельного определения размеров путем контрольной съемки видеокамерой 9 эталонной меры, установленной на торцевой части теплообменного агрегата. Затем производится съемка камерой 9 трубных отверстий 11 торцевой части теплообменного агрегата выполняется распознавание трубных отверстий с помощью программы распознавания цифрового блока 2 программного управления. Программа распознавания цифрового блока 2 программного управления представляет собой нейросеть, созданную с использованием открытого программного обеспечения, обученную на не менее 2000 примеров изображений трубных досок теплообменников, с точностью распознавания не менее 98,5% трубных отверстий после обучения на примерах. Проверка качества распознавания трубных отверстий 11 на экране (на фиг.не показано) цифрового блока 2 программного управления производится визуально. Итогом является визуальное подтверждение геометрии расположения трубных отверстий 11 на торцевой части теплообменного агрегата. Затем оператор указывает на экране цифрового блока 2 управления одно из трубных отверстий 11, с которого система управления начнет очистку. Комплекс в работу запускает управляющая программа цифрового блока 2 управления. Механизм двухкоординатного перемещения и позиционирования 7 выполняет перемещение выдвижной пустотелой штанги 4 с установленным очистным наконечником 5 к отверстию трубы 11 на торце теплообменного агрегата, указанному оператором как начальному для выполнения очистки и позиционирует очистной наконечник 5 по оси очищаемой трубы 11. Сигналы перемещения механизму 7 формируются на основании цифровой карты расположения трубных отверстий 11, сформированной перед началом работ цифровым управляющим блоком 2 на основании данных распознавания. Очистка трубы производится подачей выдвижной пустотелой штанги 4 с установленной очистным наконечником 5 вдоль оси трубки вперед с помощью механизма продольного обратно - поступательного перемещения 6. После завершения очистки трубы очистной наконечник 5 с выдвижной пустотелой штангой 4 возвращается в исходное положение перед началом очистки. Далее электродвигатели 7 механизма двухкоординатного перемещения и позиционирования выполняют перемещение выдвижной пустотелой штанги 4 с установленным очистным наконечником 5 к отверстию следующей трубы на торце теплообменного агрегата, подлежащей очистке. Процедура очистки, перемещения и позиционирования очистного наконечника 5 повторяется до тех пор, пока не будет произведена очистка всех труб теплообменного агрегата. Информация об очищенных трубах сохраняется в памяти и отображается на экране цифрового блока 2 управления.
Возможность автоматического перемещения и позиционирования очистного наконечника 5 повышает производительность комплекса очистки внутренней поверхности труб теплообменного агрегата за счет исключения действий оператора из операций перемещения и позиционирования очистной насадки.
В настоящее время устройство автоматического перемещения и позиционирования очистного наконечника труб теплообменного агрегата находится на стадии экспериментального образца.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комплекс микрогидроударной очистки внутренней поверхности труб теплообменного агрегата | 2021 |
|
RU2772008C1 |
| Комплекс гидродинамической очистки внутренней поверхности труб теплообменных агрегатов | 2021 |
|
RU2771538C1 |
| ГОЛОНОМНЫЙ СВАРОЧНЫЙ ТРАКТОР | 2018 |
|
RU2698015C1 |
| Мобильная установка для автоматизированной очистки теплообменного оборудования | 2022 |
|
RU2777649C1 |
| АГРЕГАТ ОТСЛЕЖИВАНИЯ И ВМЕШАТЕЛЬСТВА ДЛЯ ЖИВОТНОВОДЧЕСКОГО ПОМЕЩЕНИЯ | 2019 |
|
RU2804383C2 |
| Аналитический стереофотограмметрический прибор | 1984 |
|
SU1195187A1 |
| Способ управления движением беспилотных транспортных средств (БТС) в колонне и/или отдельных БТС и мониторинга интеллектуальной транспортной инфраструктурой (ИТИ) сети автомобильных дорог | 2019 |
|
RU2725569C1 |
| МОРСКОЙ ЭКОЛОГО-ЭНЕРГЕТИЧЕСКИЙ КОМПЛЕКС | 2011 |
|
RU2466053C1 |
| Оптико-электронная система преобразования данных изображения в элементы вектора состояния судна | 2023 |
|
RU2808873C1 |
| Устройство для выявления скрытых дефектов реставрированных деталей кузова автомобиля | 2021 |
|
RU2755564C1 |
Изобретение относится к устройствам, предназначенным для очистки поверхностей, в частности для чистки внутренних поверхностей труб или систем трубопроводов, путем механического воздействия потока текучей среды. Автоматическое устройство очистки внутренних поверхностей труб теплообменного агрегата содержит насосную станцию 1 с цифровым блоком 2 программного управления, снабженного программой управления выдвижной пустотелой штанги 3 в поперечной и продольной плоскости на основе цифровой карты труб, электромеханический робот очистки, управляющие выходы которого соединены с управляющими входами соответствующих электродвигателей 6 и 7 механизмов двухкоординатного продольного и поперечного обратно-поступательного перемещения штанги 3 с возможностью ее позиционирования, а также шланг 4 высокого давления, связанный с насосной станцией 1, на конце которого закреплена выдвижная пустотелая штанга 3 с очистным наконечником 5. Согласно изобретению с торцевой части теплообменного агрегата дополнительно смонтированы осветитель 8 и видеокамера 9, поле зрения 10 которой охватывает торцевую часть теплообменного агрегата. Видеокамера 9 связана с цифровым блоком программного управления каналом 12 обратной связи через блок 13 преобразования сигналов механизмов 6 и 7 двухкоординатного продольного и поперечного обратно-поступательного перемещения штанги. Цифровой блок программного управления дополнительно снабжен программой распознавания трубных отверстий 11 на торцевой части теплообменного агрегата для построения карты труб теплообменного агрегата. Техническим результатом изобретения является повышение производительности и качества гидродинамической очистки внутренней поверхности труб теплообменных агрегатов. 6 з.п. ф-лы, 4 ил.
1. Автоматическое устройство очистки внутренних поверхностей труб теплообменного агрегата, содержащее насосную станцию с цифровым блоком программного управления, снабженного программой управления выдвижной пустотелой штанги в поперечной и продольной плоскости на основе цифровой карты труб, электромеханический робот очистки, управляющие выходы которого соединены с управляющими входами соответствующих электродвигателей механизмов двухкоординатного продольного и поперечного обратно-поступательного перемещения штанги с возможностью ее позиционирования, а также шланг высокого давления, связанный с насосной станцией, на конце которого закреплена выдвижная пустотелая штанга с очистным наконечником, отличающееся тем, что с торцевой части теплообменного агрегата дополнительно смонтированы по крайней мере один осветитель и видеокамера, поле зрения которой охватывает торцевую часть теплообменного агрегата, при этом видеокамера связана с цифровым блоком программного управления каналом обратной связи через блок преобразования сигналов механизмов двухкоординатного продольного и поперечного обратно-поступательного перемещения штанги, а цифровой блок программного управления дополнительно снабжен программой распознавания трубных отверстий на торцевой части теплообменного агрегата для построения карты труб теплообменного агрегата.
2. Автоматическое устройство по п. 1, отличающееся тем, что количество эффективных пикселей видеокамеры составляет не менее 3,5 миллиона с разрешением 2048×1536 пикселей при частоте 20 кадров в секунду, а объектив камеры выполнен с фокусным расстоянием от 2,8 до 11 мм и с диафрагмой 1:1,4 и глубиной фокусировки от 0,1 м.
3. Автоматическое устройство по п. 1, отличающееся тем, что видеокамера соединена кабелем c блоком преобразования сигналов, формирующим видеосигнал в интерфейс данных Ethernet для передачи в цифровой блок управления для обработки.
4. Автоматическое устройство по п. 1, отличающееся тем, что для обеспечения необходимой яркости и контрастности осветитель выполнен светодиодным с возможностью формирования светового потока яркостью не менее 300 лм и цветовой температурой от 4000 до 4500 K.
5. Автоматическое устройство по п. 1, отличающееся тем, что цифровая карта труб теплообменного агрегата включает геометрию расположения труб на торцевой части теплообменного агрегата, информацию о диаметрах отверстий, координатах центров отверстий и расстояниях между центрами отверстий путем попиксельного измерения.
6. Автоматическое устройство по п. 1, отличающееся тем, что цифровой блок программного управления включает программу преобразования массива данных о диаметрах отверстий труб, координатах центров отверстий и расстояниях между центрами отверстий в управляющие сигналы для двухкоординатного движения очистной насадки для ее точного позиционирования по оси очищаемой трубы и для перемещения очистной насадки между трубами.
7. Автоматическое устройство по п. 1, отличающееся тем, что цифровой блок программного управления выполнен в виде контроллера или микроЭВМ и дополнительно снабжён экраном для отображения цифрового массива отверстий труб, массива данных о диаметрах отверстий труб, координатах центров отверстий труб и расстояниях между центрами для возможности выбора оператором отверстия трубы для начала очистки.
| Комплекс гидродинамической очистки внутренней поверхности труб теплообменных агрегатов | 2021 |
|
RU2771538C1 |
| US 2015068563 A1, 12.03.2015 | |||
| US 20190163207 A1, 30.05.2019 | |||
| Способ очистки внутренней поверхности труб | 1984 |
|
SU1315037A1 |
| Способ гидродинамической очистки внутренней поверхности технологических трубопроводов нефте- и нефтепродуктоперекачивающих станций | 2017 |
|
RU2689629C2 |
| US 20200356117 A1, 12.11.2020. | |||
