Заявляемое техническое решение относится к зенитно-ракетному вооружению, а именно, к средствам, предназначенным для обеспечения автоматического целеуказания и стрельбы в ночных и дневных условиях главным образом переносными зенитно-ракетных комплексами (ПЗРК), а также другими зенитно-ракетным и зенитно-пушечными системами противовоздушной обороны, не имеющими в своем составе радиолокационных средств обнаружения. Кроме этого предлагаемый способ может быть применен для повышения эффективности наведения «противодроновых» ружей на беспилотные летательные аппараты.
Известна система целеуказания для группы переносных зенитных ракетных комплексов по патенту [Патент 21653 U1, МПК F41G 1/42, 12.07.2001 г., RU]. Система содержит переносной электронный планшет, включающий подключенный к радиостанции микроэлектронный терминал для преобразования принимаемой от пунктов управления телекодовой информации и отображения на индикаторе местоположения целей с признаками госпринадлежности и состава цели, индивидуальные средства целеуказания, приемник телекодовой информации.
Недостатками вышеописанной системы являются:
- низкая информативность, наглядность и разрешающая способность отображаемой воздушной обстановки;
- громоздкий интерфейс пользователя, неоптимальное размещение составных частей и, как следствие, большие затраты времени на перемещение, развертывание (свертывание) системы;
- отсутствие автоматизированного целераспределения;
- отсутствие автоматизированной топопривязки;
- малая дальность и вероятность визуального обнаружения воздушных объектов;
- отсутствие режима тренажа;
- отсутствие учета времени наработки, а также помехозащищенности используемых линий связи.
В настоящее время приняты на вооружение и находятся в эксплуатации в МО РФ комплексы автоматизированного управления 9С520 [http://zhumalko.net/=nauka-i-tehnika/tehnika-molodezhi/2002-01] и 9С933 (9С935) [http://www.aims-expo.ru/news/archive/pvo-rossii-priobretaet-komplekt-sredstv-avtomatixaciibarnaul-t-10-10-2011-18-00-00/] для подразделений в войсках противовоздушной обороны сухопутных войск, воздушно-десантных войск и морской пехоты. Указанные автоматизированные системы управления имеют ряд недостатков:
- значительная масса изделий (с учетом основного вооружения стрелка-зенитчика составляет более 50 кг);
- использование преимущественно проводных каналов связи внутри подразделений, что приводит к существенному усложнению процесса подготовки к работе, снижению мобильности и увеличению времени приведения в боевое положение;
- невозможность использования внешних источников питания, что приводит к временному ограничению работоспособности элементов изделий;
- ограничения по дальности связи между стрелком-зенитчиком и командиром отделения, между командиром отделения и командиром взвода;
- большая зависимость дальности и качества связи от рельефа местности;
- громоздкость и малая информативность устройства приема и отображения информации;
- невозможность применения комплекса в интересах других военных специалистов;
- ограниченные возможности автономной работы подразделений стрелков-зенитчиков;
- использование в качестве огневого средства управления только ПЗРК, управление зенитной артиллерией ограничено;
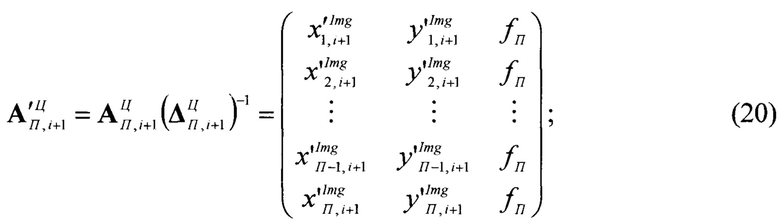
- ограниченный перечень объектов взаимодействия (командных пунктов и РЛС (радиоэлектронных станций)).
Еще одним аналогом предлагаемого технического решения является способ и устройство по патенту [Патент №2289083, F41F 3/045, 17.05.2004, RU]. Данное техническое решение позволяет обеспечивать автоматизированное управление стрельбой группой ПЗРК и поражать воздушные объекты в дневное и ночное время.
Недостатками известного технического решения являются:
- отсутствие оптического канала связи между устройствами;
- низкая живучесть устройства;
- большие габариты и сложная схема устройства.
В качестве прототипа выбран способ обеспечения автоматизации стрельбы группы переносных зенитно-ракетных комплексов [Патент 2662766 С1, МПК F41F 3/045, 30.07.2018 г., RU], заключающийся в подключении к радиостанции, приеме и обработке от пунктов управления телекодовой информации в виде кодограмм, отображении на индикаторе местоположение целей с признаками государственной принадлежности «свой-чужой», обеспечении обработки информации на ЭВМ, расположенных в нарукавных информационно-вычислительных системах индивидуальных средств целеуказания, ведении разведки воздушного противника, автоматизированном оповещении вышестоящих командных пунктов о сопровождении воздушных объектов, реализации голосового сопровождения действий стрелка-зенитчика, голосовом управлении ЭВМ, управлении всеми функциональными элементами автоматизированной системы управления ПЗРК, информационном совмещении стрелка-зенитчика и командира отделения на одной технической платформе, осуществлении объективного контроля действий стрелка-зенитчика, регистрации информации, приходящей по каналам связи, в отображении целевой информации в средстве целеуказания командира отделения и в устройстве визуализации с защитными очками стрелка-зенитчика, соединенного с нарукавной информационно-вычислительной системой, совмещающей в себе функции отображения, определения угла крена, тангажа и азимутального направления взгляда стрелка, обеспечивающего прием информации от прибора ночного видения и трансляцию совмещенного изображения от него графической картины, синтезированной центральным процессором, обнаружения цели путем поворота стрелка-зенитчика по азимуту в сторону метки цели и подъеме уровня взгляда по углу места, совмещении метки прицела и метки цели, за счет чего осуществляется наведение стрелка-зенитчика на цель и дальнейший пуск зенитной-управляемой ракеты (ЗУР) по цели.
Недостатками прототипа являются:
- увеличенное время с момента обнаружения до момента пуска ЗУР из-за необходимости последовательного выполнения операций обнаружения воздушной цели по средствам устройства визуализации с защитными очками стрелка-зенитчика и дальнейшего наведения на нее ПЗРК;
- сниженная точность наведения и невозможность дальнейшей эксплуатации при наличии механического повреждения устройства визуализации с защитными очками стрелка-зенитчика, приведшее к нарушению геометрии его оптической схемы;
- излишняя конструктивная сложность системы, реализующей данный способ, связанная с наличием нескольких отдельных устройств, располагаемых на стрелке-зенитчике;
- не реализована возможность предварительного наведения и автоматической стрельбы по вновь появившейся воздушной цели при стрельбе в условиях ограниченных секторов обзора (стрельбы);
- не предусмотрена разнотиповая одновременная индикация воздушных целей, что не позволяет без проведения дополнительных операций с автоматизированной системой управления ПЗРК быстро сменить цель в случае поражения своей цели, выхода ее из зоны пуска или поступления команды «отбой стрельбы по данной цели».
Основным техническим результатом, на достижение которого направлено заявленное изобретение является повышение эффективности применения ПЗРК.
Данный технический результат обеспечивается решением совокупности задач, заключающихся:
- в уменьшении суммарного времени визуального поиска цели и наведения на нее ПЗРК, достигаемого тем, что целеуказание осуществляется путем проведения индикации (графической визуализации) местоположения целей в поле зрения оптико-электронного калана (ОЭК) наведения системы целеуказания (СЦУ), механически связанной с ПЗРК, таким образом оператор при получении целеуказания осуществляет визуальный поиск цели не по всему изображению, а только в границах области выделения, при этом визуальный поиск цели и наведение на нее прицельной марки благодаря механическому креплению СЦУ на ПЗРК происходит одновременно с наведением ГСН ЗУР на данную цель, что также способствует сокращению времени с момента обнаружения воздушной цели и осуществлению по ней пуска ракеты;
- в обеспечении предварительного наведения ПЗРК на приближающуюся воздушную цель, находящуюся вне зоны прямой видимости при боевой работе на местности с ограниченными секторами наблюдения (стрельбы), достигаемого тем, что в процессе осуществления заявленного способа предусмотрены автоматический и полуавтоматический режим работы, включающие автоматическое или ручное определение (задание) границы прямой видимости, наведение прицельной марки на область выделения цели, удержание цели в прицельной марке до выхода ее в область прямой видимости и автоматическую подачу команды на пусковой механизм ПЗРК для проведения захвата цели головкой самонаведения (ГСН) и пуска ЗУР;
- в обеспечении возможности быстрой смены цели без проведения дополнительных операций (манипуляций) и усложнения аппаратуры целеуказания, достигаемого тем, что в поле зрения ОЭК наведения СЦУ осуществляется одновременная индикация местоположения всех обнаруженных целей, при этом каждая цель выделяется областью выделения установленной формы, по которой оператор может визуально определить свою(и) или чужую(ие) цель(и), цель(и) ближайшего ПЗРК, приоритетную цель, очередность поражения и прочую информацию, а в случае поражения своей цели или смены приоритета - может быстро навести прицельную марку на другую цель без проведения дополнительных операций (манипуляций)с СЦУ, и, следовательно, потери времени;
- в повышении надежности и повышении точности наведения СЦУ ПЗРК, за счет конструктивного исполнения СЦУ в виде моноблока, закрепленного на ПЗРК, а также обеспечения возможности проведения полуавтоматической калибровки ОЭК СЦУ, позволяющей корректировать отображаемую графическую информацию о целях при появлении геометрических искажений изображений, возникающих как при производстве ОЭК, а также по вине эксплуатации, например, при воздействии на ОЭК СЦУ вибрационных ил ударных нагрузок.
Изобретение поясняется чертежами, которые не охватывают и тем более не ограничивают весь объем притязаний данного изобретения, а являются лишь иллюстрирующими материалами частного случая выполнения:
- на фиг. 1 показаны состав СЦУ для ПЗРК и вариант поля зрения СЦУ, отображаемого на цифровом изображении с дополнительными маркерами о положении целей и траекториями их движения, а также миникартой, описывающей ориентацию положение поля зрения ПЗРК относительно воздушных целей;
- на фиг. 2 иллюстрируется взаимное положение и ориентация цели, мировой системы координат и системы координат СЦУ;
- на фиг. 3 показана схема, иллюстрирующая вариант процесса ручного задания границы и углов прямой видимости воздушной цели;
- на фиг. 4 иллюстрируется вариант процесса автоматического определения по цифровому изображению границы видимости воздушной цели;
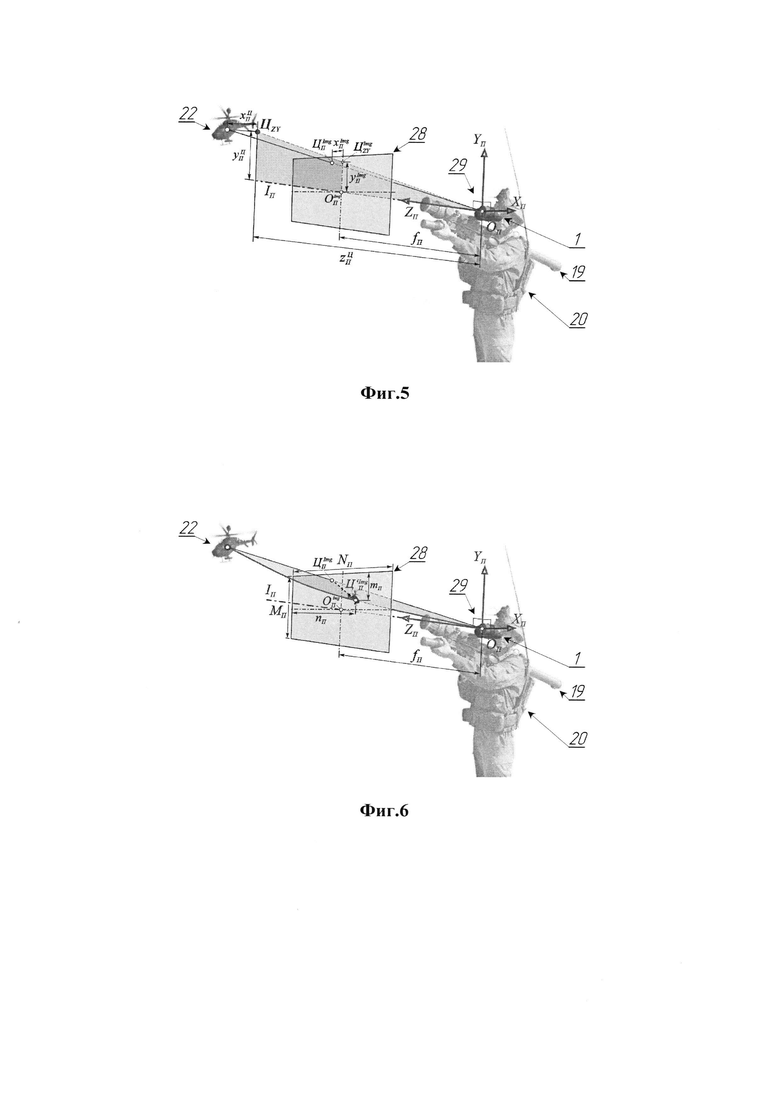
- на фиг. 5 иллюстрируется порядок преобразования трехмерных координат цели в трехмерные координаты его изображения в системе координат СЦУ;
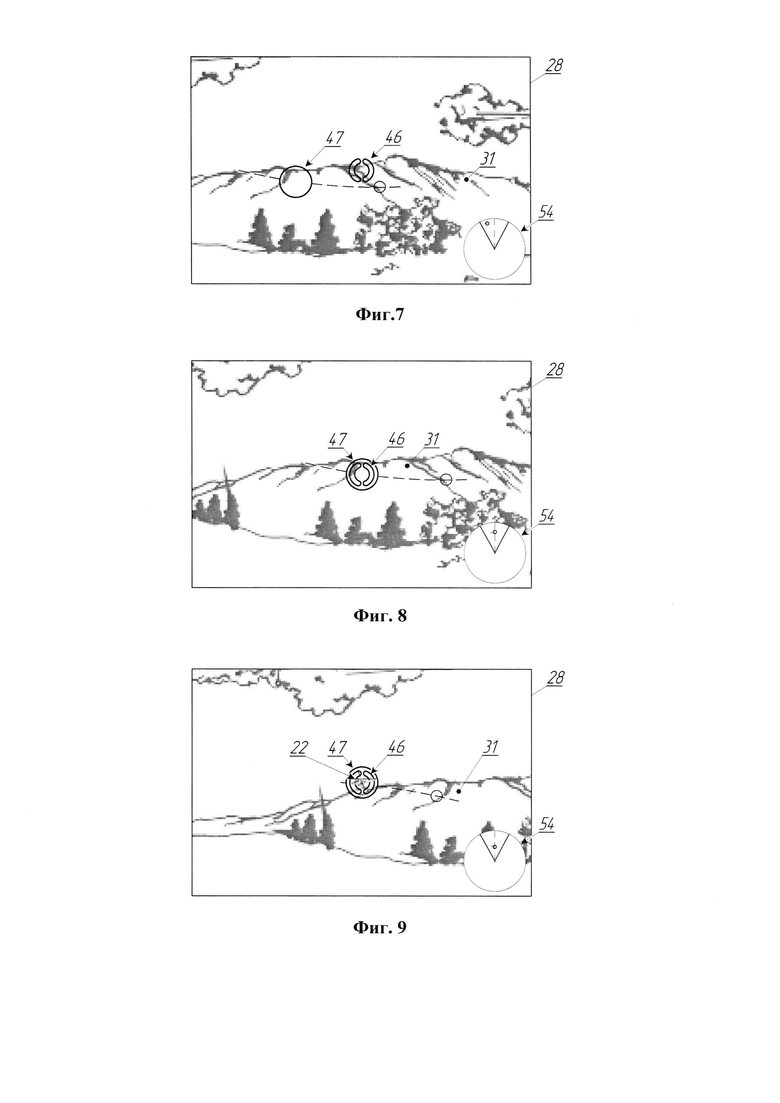
- на фиг. 6 иллюстрируется порядок коррекции координат изображения цели в поле зрения СЦУ на величины геометрических искажений ОЭК;
- на фиг. 7, 8, 9 иллюстрируется порядок предварительного наведения СЦУ ПЗРК на цель, находящуюся вне прямой видимости;
СЦУ 1 для ПЗРК (Фиг. 1), реализующая предлагаемый способ с учетом получаемых технических результатов должна содержать по крайней мере:
- блок обработки информации 2;
- оптико-электронный канал (ОЭК) 3;
- блок электропитания 4;
- аккумуляторная батарею 5;
- дисплей (микродисплей) 6, формирующий цифровое изображение 28;
- панель управления 7;
- датчик координат 8;
- гироскопический датчик 9;
- магнитный датчик 10;
- блок обмена данными 11;
- звуковой сигнализатор 15.
СЦУ 1 изготавливается в виде единого моноблока, выполненного в виде легкого компактного устройства с возможностью крепления на пусковой установке ПЗРК 19. Может применяться как самостоятельно, т.е. выполнять роль оптико-электронного прицела ПЗРК 19, так и в качестве дополнительного элемента к штатному оптическому прицелу.
Для совместного использования с ПЗРК 19 СЦУ 1 должна иметь:
- механическое крепление 26 на корпусе ПЗРК 19;
- информационное сопряжение 27 с пусковым механизмом 16 и через него - с ГСН 18 ЗУР 17.
ОЭК 3 предназначен для преобразования электромагнитного излучения от наблюдаемых объектов в цифровое изображение 28. ОЭК 3 содержит объектив и фотоприемное-устройство высокого разрешения, располагаемое на оптической оси объектива на величине оптического расстояния ƒП. В зависимости от исполнения ОЭК 3 может функционировать отдельно в видимом, ультрафиолетовом или инфракрасном спектре, или обеспечивать получение комплексированного изображения одновременно с нескольких каналов наблюдения.
Цифровое изображение 28, получаемые с ОЭК 3, и отображаемое на дисплее 6, состоит из пикселей. Каждый пиксель характеризуется значением, которое состоит из полутонового значения или цветового значения. В полутоновых изображениях значение пикселя представляет собой одну величину, которая характеризует яркость пикселя. Наиболее общим форматом описания пикселя является байт изображения, в котором значение пикселя представлено восьмиразрядным целым числом, лежащим в диапазоне возможных значений от 0 до 255. Как правило, значение пикселя, равное нулю, используют для обозначения черного пикселя, а значение 255 используют для обозначения белого пикселя. Промежуточные значения описывают различные оттенки полутонов. В цветных изображениях для описания каждого пикселя (расположенного в цветовом пространстве размерности RGB - красный, зеленый, синий) должны быть отдельно определены красная, зеленая и синяя компоненты. Иными словами, значение пикселя фактически представляет собой вектор, описанный тремя числами. Три различные компоненты могут быть сохранены как три отдельных полутоновых изображения, известные как цветовые плоскости (по одной для красного, зеленого и синего цветов), которые можно воссоединять при отображении или при обработке.
Дисплей 6 предназначен для отображения цифрового изображения 28. Дисплей может иметь микроисполнение. В этом случае он дополнительно может содержать окуляр 43, для проецирования изображения на сетчатку человеческого глаза.
Блок обработки информации 2 предназначен для обработки информации с ОЭК 3, датчика координат 8, гироскопического датчика 9 и магнитного датчика 10, наложения на цифровое изображение 28 дополнительных маркеров и другой информации, передачи изображения с дополнительными маркерами и прочей графической информацией на дисплей 6, обмена информации с блоком обмена данными 11 и выработки звуковых (голосовых) сигналов на звуковой сигнализатор 15.
Блок обработки информации 2 включает размещенные на машиночитаемом носителе память 13 для хранения данных и приложение 14.
Машиночитаемый носитель 12 может включать энергозависимые носители, энергонезависимые носители, съемные носители и несъемные носители, а также может быть любой доступной средой, к которой может иметь доступ универсальное вычислительное устройство. Неограничивающие примеры машиночитаемого носителя могут включать компьютерные накопители и среды передачи данных. Компьютерные накопители дополнительно могут включать энергозависимые, энергонезависимые, съемные и несъемные носители, осуществленные любым способом или с помощью любой технологии хранения информации, например, машиночитаемые инструкции, структуры данных, программные модули или другие данные.
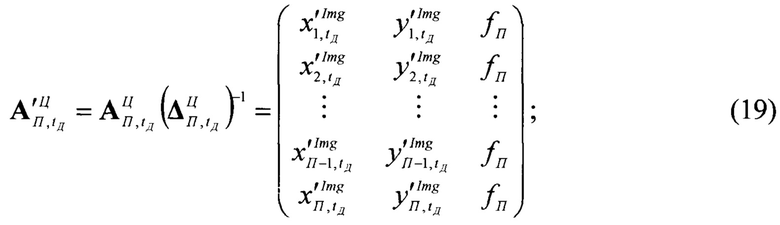
Память 13 выполняется с возможностью хранения внутренних параметров ОЭК 3 и данных приложения 14.
К внутренним параметрам ОЭК 3 относятся следующие величины:
ƒП - фокусное расстояние объектива ОЭК 3;
 и
и  - линейные размеры в горизонтальной и вертикальной плоскостях пикселя фотоприемного устройства ОЭК 3;
- линейные размеры в горизонтальной и вертикальной плоскостях пикселя фотоприемного устройства ОЭК 3;
NП и МП - горизонтальное и вертикальное разрешение фотоприемного устройства ОЭК 3;
а0, а1, …, aq-1, aq и b0, b1, …, bq-1, bq - полиноминальные коэффициенты для коррекции координат положения цели 22 на цифровом изображении 28.
К данным приложения 14 относятся обрабатываемые изображения 28, а также данные, получаемые от датчиков 8, 9, и 10, т.е. значения координат  и углов
и углов  ,
, ,
, ,
, , а также данные целеуказания о координатах воздушных целей.
, а также данные целеуказания о координатах воздушных целей.
Приложение 14 содержит программно исполняемые модули или команды, выполненные с возможностью исполнения по меньшей мере одним процессором и обеспечивающие обработку изображений 28, получение точных данных с датчиков 8, 9, 10, данных с блока обмена данными 11 об обнаруженных или принятых по каналам системы управления тактическим звеном целях, а также другие команды и модули для обеспечения эффективной работы ПЗРК, например, программно исполняемые модули проведения функционального контроля, калибровки, тренировки, обучения и пр.
Под СК 29 OПXПYПZП СЦУ (Фиг. 2) понимается локальная СК с началом в главной оптической точке объектива ОЭК 3, осью OПZП, направленной вдоль оптической оси объектива ОЭК 3, осью OПXП, направленной влево, и осью OПYП - вверх относительно оси OПZП. Положение начала и ориентация осей СК29 OПXПYПZП в пространстве задается координатами  и углами
и углами  относительной осей мировой СК 30 OWXWYWZW. Дополнительно ориентация СК 29 OПXПYПZП в горизонтальной плоскости задается углом
относительной осей мировой СК 30 OWXWYWZW. Дополнительно ориентация СК 29 OПXПYПZП в горизонтальной плоскости задается углом  на север относительно оси OПZП.
на север относительно оси OПZП.
Положение воздушной цели 22 в мировой СК 30 OWXWYWZW (Фиг. 2) описывается координатами  .
.
Положение воздушной цели 22 в СК 29 OПXПYПZП (Фиг. 2) описывается координатами  .
.
Датчик координат 8 обеспечивает прием данных от спутниковой системы навигации и преобразования полученной информации в пространственные координаты  начала СК 29 OПXПYПZП, характеризующей положение СЦУ 1 в мировой СК 30 OWXWYWZW (фиг. 2).
начала СК 29 OПXПYПZП, характеризующей положение СЦУ 1 в мировой СК 30 OWXWYWZW (фиг. 2).
Гироскопический датчик 9 обеспечивает получение информации о пространственной ориентации осей СК 29 OПXПYПZП в горизонтальной, вертикальной и поперечных плоскостях, соответственно  (фиг. 2).
(фиг. 2).
Магнитный датчик 10 обеспечивает получение информации об угле  ориентации оси OПZП СК29 OПXПYПZП относительно направления на север.
ориентации оси OПZП СК29 OПXПYПZП относительно направления на север.
Блок обмена данными 11 предназначен для преобразования данных с блока обработки информации 2 в команды и информационное сопряжение по радио- или проводному каналу со средством разведки 21, например, с радиолокационной станцией, или системой управления тактическим звеном 25. Кроме этого блок обмена данными 11 может иметь возможность информационного сопряжения с радиостанцией 24, выполняющей роль ретранслятора при обмене телекодовой информацией с удаленными средством разведки 21 или системой управления тактическим звеном 25.
Панель управления 7 предназначена для взаимодействия оператора 20 с приложением 13 и ввода команд управления.
СЦУ 1 обеспечивает по крайней мере следующие режимы работы:
- автономный режим при отсутствии информации о целеуказании (СЦУ 1 работает как обычный оптико-электронный прицел с отображением прицельной марки);
- ручной режим наведения без выделения области прямой видимости и ручной подачей команд на захват цели ГСН 18 и запуск ЗУР 17;
- автоматический режим с автоматическим выделением области прямой видимости (неба) и автоматической подачей команд на захват цели ГСН 18 и пуск ЗУР 17;
- полуавтоматический режим с ручным выделением области прямой видимости и автоматической подачей команд на захват цели ГСН 18 и пуск ЗУР 17;
- режим калибровки;
- режим тренировки и обучения с ручным или автоматическим распознаванием неба, эмуляцией разных целей и имитацией команд взаимодействия со пусковым механизмом 16 ПЗРК 19;
- режим функционального контроля. Осуществляют заявленный способ следующим образом. С датчика координат 8 принимают значения координат  со спутниковой навигационной системы в любой точке земного шара, в любой момент времени. В случае отсутствия спутникового сигнала координаты в системе общегеографических координат вводят вручную с помощью панели управления 7.
со спутниковой навигационной системы в любой точке земного шара, в любой момент времени. В случае отсутствия спутникового сигнала координаты в системе общегеографических координат вводят вручную с помощью панели управления 7.
С гироскопического датчика 9 принимают значения углов  .
.
С магнитный датчик 10 принимают значение угла  .
.
С ОЭК 3 принимают последовательность цифровых изображений 28.
При необходимости калибруют СЦУ 1 в режиме калибровки.
Калибровку выполняют во время завершающих этапов процесса изготовления СЦУ 1, например, после ее сборки, настройки и проверки работоспособности, а также при проведении технического обслуживания. Дополнительно калибровку могут выполнять непосредственно перед боевым применением СЦУ 1 в условиях воздействия на СЦУ длительных вибрационных и ударных нагрузок.
Процесс калибровки заключается в вычислении коэффициентов а0, а1, …, aq-1, aq и b0, b1, …, bq-1, bq полиномов  и
и  , определяющих зависимость между координатами
, определяющих зависимость между координатами  ,
,  расчетного (теоритического) положения изображения
расчетного (теоритического) положения изображения  цели и координатами
цели и координатами  ,
,  фактического положения изображения
фактического положения изображения  цели на изображении 28 с учетом влияния на процесс формирования изображения дисторсионных искажений и случайных факторов, возникающих в процессе производства ОЭК 3 или по вине эксплуатации.
цели на изображении 28 с учетом влияния на процесс формирования изображения дисторсионных искажений и случайных факторов, возникающих в процессе производства ОЭК 3 или по вине эксплуатации.
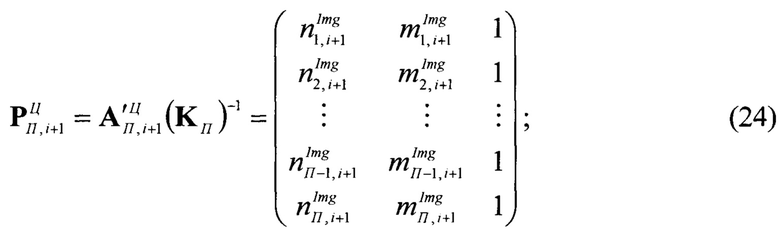
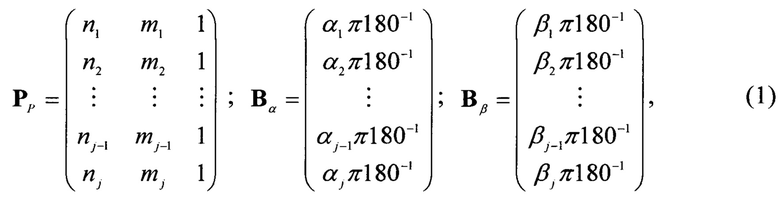
При проведении калибровки наводят прицельную марку 46 СЦУ 1 на любой контрастный объект, проводят захват участка изображения объекта, после чего совершают плавные вертикальные и горизонтальные угловых колебаний СЦУ 1 относительно начала координат OП СК 29 OПXПYПZП таким образом, чтобы захваченное изображение объекта перемещалось на изображении 28 последовательно вверх-вниз, вправо-влево до краев изображения 28, но не выходя за его пределы. При этом в процессе калибровки для каждого j-го кадра изображения 28 проводят фиксацию участка изображения удаленного объекта и формируют с записью в память 14 СЦУ 1 массив PP пиксельных координаты nj, mj и соответствующие массивы Bα и Bβ значений горизонтальных αj и вертикальных βj углов:
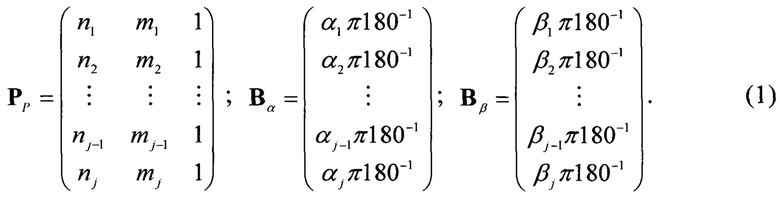
Для каждого сохраненного значения углов αj и βj вычисляют координаты  ,
,  фактического положения изображения удаленного объекта в СК 29 OПXПYПZП согласно выражениям:
фактического положения изображения удаленного объекта в СК 29 OПXПYПZП согласно выражениям:
Для каждого j-го значения пиксельных координат nj, mj вычисляют координаты  ,
,  расчетного положения изображения удаленного объекта в СК 29 OПXПYПZП согласно выражению:
расчетного положения изображения удаленного объекта в СК 29 OПXПYПZП согласно выражению:
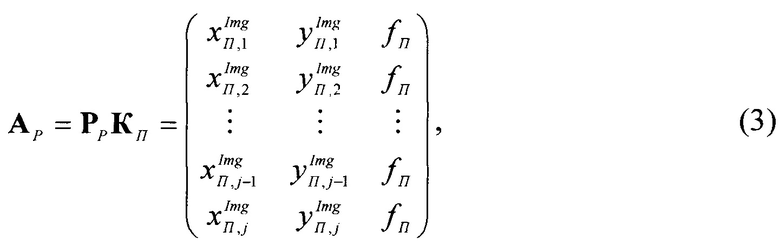
где 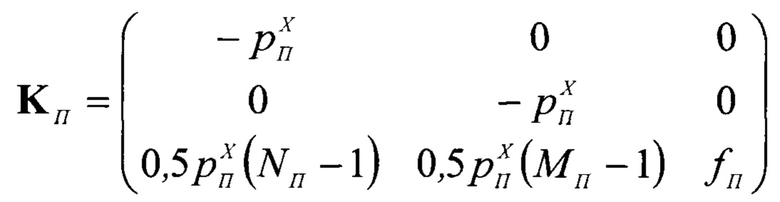 - матрица внутренних параметров ОЭК 1.
- матрица внутренних параметров ОЭК 1.
Вычисляют массивы разностей ΔX и ΔY в горизонтальной и вертикальной плоскостях между расчетными и фактическими положениями изображений удаленного объекта согласно выражений:
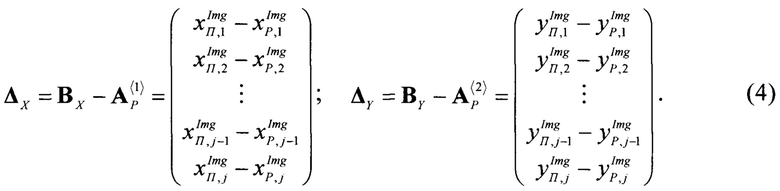
Аппроксимируют массивы разностей ΔX и ΔY с помощью полиноминальных зависимостей q-го порядка

а вычисленные коэффициенты а0, a1, …, aq-1, aq и b0, b1, …, bq-1, bq сохраняют в память 13 СЦУ 1 для дальнейшей работы.
При ведении стрельбы в городских, горных или лесных условиях, когда прямую видимость цели (область пуска) закрывают препятствие(я) 31 (Фиг. 3) (рельеф местности, здания, сооружения, растительность и т.п.), определяют границу 35 прямой видимости целей на изображении 28.
При этом граница прямой видимости 35 описывается последовательностью точек  (Фиг. 3), каждая из которых задается для сектора наблюдения через g-й угловой интервал, например, через 1°, и задается в виде массива пар углов
(Фиг. 3), каждая из которых задается для сектора наблюдения через g-й угловой интервал, например, через 1°, и задается в виде массива пар углов

где αg - угол в горизонтальной плоскости относительно направления 37 на север на g-ю точку  (Фиг. 3);
(Фиг. 3);
βg - угол в вертикальной плоскости между горизонтальной линией 36 и g-й точкой  (Фиг. 3).
(Фиг. 3).
Если область прямой видимости не имеет четкой границы 35 с областью, закрытой препятствием 31, то границу прямой видимости 35 задают перед боевым применением ПЗРК 19 в ручном режиме путем последовательного перемещения прицельной марки СЦУ 1 вдоль границы между областью прямой видимости (пуска) и препятствием 31 (Фиг. 3) с последовательным считыванием через g-й интервал с датчиков 9, 10 и записью в память 13 значений пар углов αg и βg в виде массива GΔ.
Если область 44 прямой видимости имеет четкий контраст с областью 45, закрытой препятствием, то границу 35 данной области (границу пуска) (Фиг. 4) определяют в автоматическом режиме как предварительно, так и непосредственно в процессе наведения ПЗРК 19 в виде массива GP пиксельных координат ng и mg:

На фиг. 4 показан неофаничивающий пример, иллюстрирующий порядок вычисления массива GP, определяющего границу 43 прямой видимости на цифровом изображении 28 видимого диапазона, включающий этап 38 проведения инвентирования и бинаризации, этап 39 применения морфологической эрозии, этап 40 дилатации, а также этап 41 задания границы 35 области прямой видимости с формированием и сохранением в память 22 массива для дальнейшего использования.
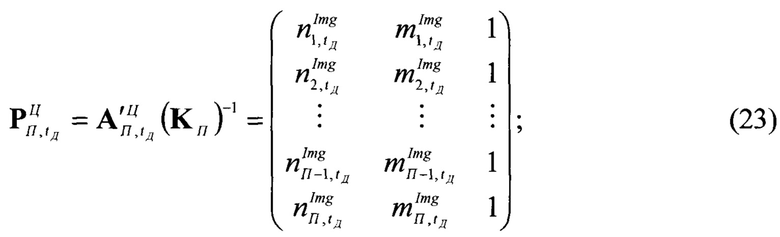
Принимают напрямую или по средствам радиостанции 24 от удаленного средства разведки 21, например, РЛС, или системы управления тактическим звеном 25 координаты  воздушной цели 22 с одновременным формированием массивов
воздушной цели 22 с одновременным формированием массивов 
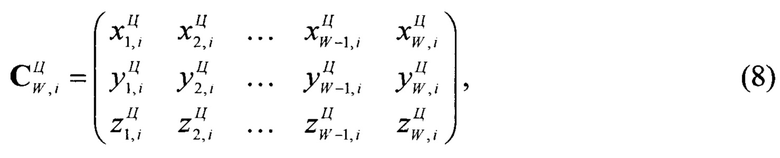
где W - номер цели в массиве 
i - порядковый номер массива (обновления данных о целях).
Подают на звуковой сигнализатор 15 сигнал о приеме целеуказания.
Для каждого i-го массива  регистрируют момент принятия данных
регистрируют момент принятия данных  .
.
Для каждой пары массивов  и
и  вычисляют массив
вычисляют массив  скоростей движения воздушных целей:
скоростей движения воздушных целей:

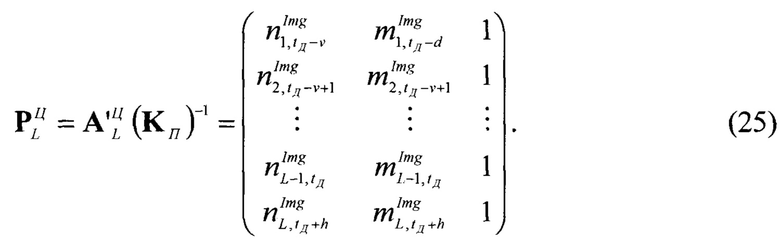
Для каждого кадра изображения 28 вычисляют действительное положение цели на текущий момент времени tД относительно последнего i+1-го массива  данных
данных

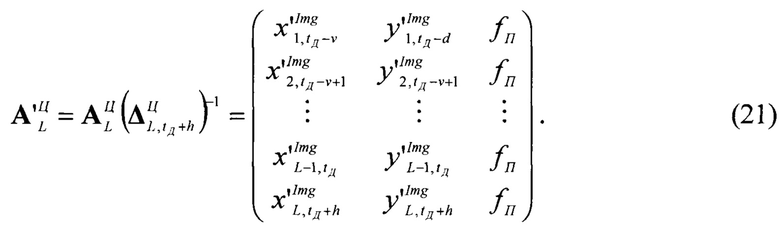
Для каждой цели относительно действительного (текущего) времени tД в пределах временного отрезка (tД-tv, …, tД, …, tД+th), где tv и th временные интервалы прошедшего и прогнозируемого положений целей, проводят экстраполяцию изменений их координат и находят массивы  траекторий
траекторий

Из памяти 13 принимают данные о внутренних параметрах ОЭК 3. Массивы координат целей для действительного момента времени  , последнего приема данных
, последнего приема данных  и массивы траекторий
и массивы траекторий  преобразуют из СК 30 OWXWYWZW в СК 29 OПXПYПZП в соответствии с выражениями (Фиг. 2):
преобразуют из СК 30 OWXWYWZW в СК 29 OПXПYПZП в соответствии с выражениями (Фиг. 2):



где 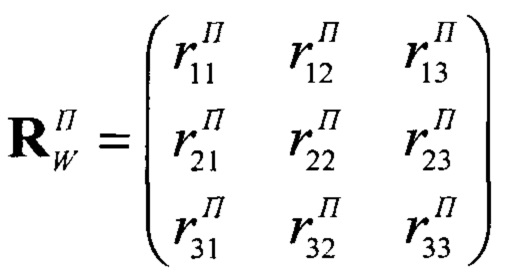 - матрица поворота осей СК 29 OПXПYПZП относительно осей СК 30 OWXWYWZW;
- матрица поворота осей СК 29 OПXПYПZП относительно осей СК 30 OWXWYWZW;
 - расширенная до размерности массивов
- расширенная до размерности массивов  ,
,
 и
и  матрица построенная из векторов
матрица построенная из векторов  положения СК 29 OПXПYПZП в СК 30 OWXWYWZW;
положения СК 29 OПXПYПZП в СК 30 OWXWYWZW;


При этом для каждой цели 22 (23) назначают свою форму области выделения 47 (50) и в соответствии со значениями массива координат  для действительного момента времени tД отображают цели на миникарте 54 цифрового изображения 28. Кроме этого на миникарте 54 цифрового изображения 28 отображают положение оптической оси и поле зрения ОЭК 3.
для действительного момента времени tД отображают цели на миникарте 54 цифрового изображения 28. Кроме этого на миникарте 54 цифрового изображения 28 отображают положение оптической оси и поле зрения ОЭК 3.
Проецируют координаты массивов  ,
,  и
и  на плоскость изображения 28 в СК 29 OПXПYПZП в соответствии с выражениями (Фиг. 5):
на плоскость изображения 28 в СК 29 OПXПYПZП в соответствии с выражениями (Фиг. 5):
где  - проекционные матрицы.
- проекционные матрицы.
Задают массивы  ,
, ,
, коррекции:
коррекции:

где 
Корректируют значения массивов  ,
,  и
и 
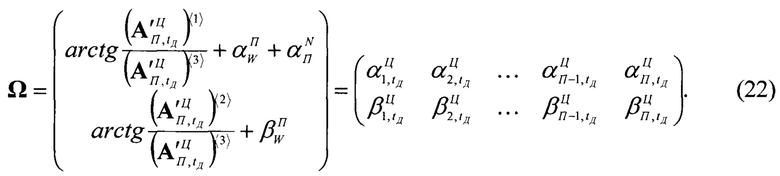
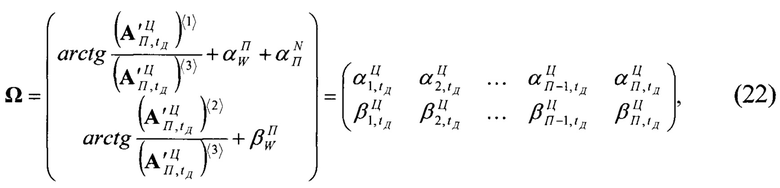
Находят и сохраняют в память 13 СЦУ 1 массив Ω текущих горизонтальных и вертикальных углов на цели  согласно выражению:
согласно выражению:
Преобразуют трехмерные координаты массивов  ,
,  и
и  в пиксельные плоские координаты на изображении 28:
в пиксельные плоские координаты на изображении 28:
Согласно данным массивов  ,
,  и
и  на каждом кадре цифрового изображения отображают области 47 (50) действительного положения целей, области 49 (52) последнего обновления данных о целях, траектории 48 (51) движения целей (Фиг. 1). При этом размеры областей 47 (50) действительного положения целей 22 (23) на изображении 28 задают размерами, сопоставимыми с размером прицельной марки 46, размеры областей 49 (52) последнего обновления данных о целях задают в кратно меньшем размере. При чем, если скорость движения цели и скорость обновления данных о ней таковы, что графически область 47 (50) действительного положения целей будет перекрывать область 49 (52) последнего обновления данных, то отображают только область 47 (50) действительного положения целей. Форму областей выделения для каждой цели задают индивидуально в виде геометрического примитива определенной (заданной заранее) форме. Если пиксельные координаты положения цели 22 выходят за границы изображения 28, то положение цели отображают в форме тактического знака или комбинации 53 уменьшенной формы выделения с тактическим знаком цели на краю изображения 28 в той строке или столбце, которые своими значениями не вышли на границы изображения, как показано на фиг. 1.
на каждом кадре цифрового изображения отображают области 47 (50) действительного положения целей, области 49 (52) последнего обновления данных о целях, траектории 48 (51) движения целей (Фиг. 1). При этом размеры областей 47 (50) действительного положения целей 22 (23) на изображении 28 задают размерами, сопоставимыми с размером прицельной марки 46, размеры областей 49 (52) последнего обновления данных о целях задают в кратно меньшем размере. При чем, если скорость движения цели и скорость обновления данных о ней таковы, что графически область 47 (50) действительного положения целей будет перекрывать область 49 (52) последнего обновления данных, то отображают только область 47 (50) действительного положения целей. Форму областей выделения для каждой цели задают индивидуально в виде геометрического примитива определенной (заданной заранее) форме. Если пиксельные координаты положения цели 22 выходят за границы изображения 28, то положение цели отображают в форме тактического знака или комбинации 53 уменьшенной формы выделения с тактическим знаком цели на краю изображения 28 в той строке или столбце, которые своими значениями не вышли на границы изображения, как показано на фиг. 1.
Ориентируясь по положению маркера цели на миникарте 54, а также по положению боковых маркеров 53 на изображении 28 СЦУ 1, наводят ПЗРК на выбранную цель 22, после чего совмещают прицельную марку 46 и область 47 действительного положения цели. Если цель 22 находится в зоне прямой видимости (позиции 33, 34 на фиг. 3), то в ручном режиме подают сигнал в пусковое устройство 22 на захват цели 22 ГСН 18 и дальнейший пуск ЗУР 17. После поражения цели 22 или смены приоритета наводят ПЗРК 19 на следующую цель 23 и повторяют аналогичные действия по ее поражению.
Если применение ПЗРК осуществляется на местности с ограниченными секторами наблюдения (пуска), цель 22 находится вне зоны прямой видимости (позиция 32 на фиг. 3), а условия наблюдения таковы, что область прямой видимости (пуска) имеет четкий контраст с областью перекрытия цели 22 препятствием 31, то пуск из ПЗРК проводят в автоматическом режиме. Для этого:
- наводят ПЗРК на цель путем совмещения прицельной марки 46 и области 47 действительного положения цели;
- сопровождают цель, удерживая прицельную марку 46 на области 47 действительного положения цели, при этом в автоматическом режиме задают массивом GP согласно выражению (7);
- сопоставляют пиксельные координаты  и
и  сопровождаемой цели 22 из массива
сопровождаемой цели 22 из массива  с массивом пиксельных координат ng и mg, описывающих границу прямой видимости 35, при этом из массива GP выбирают столбец
с массивом пиксельных координат ng и mg, описывающих границу прямой видимости 35, при этом из массива GP выбирают столбец  , в котором значение mg имеет максимальную близость со значением
, в котором значение mg имеет максимальную близость со значением  массива
массива  , вычисляют разность
, вычисляют разность  ;
;
- как только значение разности Δn станет положительным, т.е. цель 22 перешла в область 44 прямой видимости (Фиг. 4), то в автоматическом режиме подают команду в пусковое устройство 16 на захват цели 22 ГСН 18 и дальнейший пуск по ней ЗУР 17.
Если применение ПЗРК осуществляется на местности с ограниченными секторами наблюдения (пуска), цель находится вне зоны прямой видимости (позиция 32 на фиг. 3), а условия наблюдения таковы, что область прямой видимости (пуска) не имеет четкого контраста с областью перекрытия цели 22 препятствием 31, то пуск из ПЗРК проводят в полуавтоматическом режиме. Для этого:
- перед применением ПЗРК 19 в ручном режиме обозначают границу прямой видимости с записью массива GΔ согласно выражению (6);
- наводят ПЗРК на цель путем совмещения прицельной марки 46 и области 47 действительного положения цели;
- сопровождают цель, удерживая прицельную марку 22 на области 23 действительного положения цели, одновременно принимая из памяти 13 массив Ω;
- сопоставляют массив GΔ со значениями массива Ω, при этом из массива GΔ выбирают столбец  , в котором значение αg имеет максимальную близость со значением
, в котором значение αg имеет максимальную близость со значением  , вычисляют разность
, вычисляют разность  ;
;
- как только значение разности Δβ станет отрицательным, т.е. цель 22 перемесится из-за препятствия 31 в область прямой видимости (позиция 33 на фиг. 3), то в автоматическом режиме подают команду в пусковое устройство 22 на захват цели 22 ГСН 18 и дальнейший пуск по ней ЗУР 17.
| название | год | авторы | номер документа |
|---|---|---|---|
| Информационная обзорно-панорамная система наблюдения | 2020 |
|
RU2757061C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ СТРЕЛЬБЫ ГРУППЫ ПЕРЕНОСНЫХ ЗЕНИТНО-РАКЕТНЫХ КОМПЛЕКСОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2289083C2 |
| СИСТЕМА ПОРТАТИВНЫХ КОМПЛЕКТОВ ДЛЯ АВТОМАТИЗИРОВАННОГО ЦЕЛЕУКАЗАНИЯ НА ПОЛЕ БОЯ | 2019 |
|
RU2717138C1 |
| СПОСОБ ВНЕШНЕГО ЦЕЛЕУКАЗАНИЯ С ИНДИКАЦИЕЙ ЦЕЛЕЙ ДЛЯ ОБРАЗЦОВ БРОНЕТАНКОВОГО ВООРУЖЕНИЯ | 2019 |
|
RU2697047C2 |
| Зенитный ракетный комплекс | 2017 |
|
RU2651533C1 |
| ЗЕНИТНАЯ УПРАВЛЯЕМАЯ РАКЕТА ИНДИВИДУАЛЬНОГО ПОЛЬЗОВАНИЯ | 1996 |
|
RU2111445C1 |
| СПОСОБ АВТОМАТИЗАЦИИ ЦЕЛЕУКАЗАНИЯ ПРИ ПРИЦЕЛИВАНИИ НА ВЕРТОЛЕТНОМ КОМПЛЕКСЕ | 2018 |
|
RU2697939C1 |
| СПОСОБ УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ЗЕНИТНОГО РАКЕТНО-ПУШЕЧНОГО КОМПЛЕКСА | 2012 |
|
RU2506523C1 |
| СПОСОБ ВНУТРЕННЕГО ЦЕЛЕУКАЗАНИЯ С ИНДИКАЦИЕЙ ЦЕЛЕЙ ДЛЯ ОБРАЗЦОВ БРОНЕТАНКОВОГО ВООРУЖЕНИЯ | 2019 |
|
RU2712367C2 |
| Способ обеспечения автоматизации стрельбы группы переносных зенитно-ракетных комплексов и устройство для его осуществления | 2016 |
|
RU2662766C1 |
Изобретение относится к зенитно-ракетному вооружению, конкретно к средствам, предназначенным для обеспечения автоматического целеуказания и стрельбы в ночных и дневных условиях переносными зенитно-ракетными комплексами (ПЗРК). Сущность заявленного технического решения заключается в обеспечении решения совокупности следующих задач: уменьшение суммарного времени визуального поиска цели и наведения на нее ПЗРК; обеспечение предварительного наведения ПЗРК на приближающуюся воздушную цель, находящуюся вне зоны прямой видимости при боевой работе на местности с ограниченными секторами наблюдения; обеспечение возможности быстрой смены цели без проведения дополнительных операций и усложнения аппаратуры целеуказания; обеспечение конструктивного исполнения системы целеуказания (СЦУ) в виде моноблока, закрепленного на ПЗРК, а также проведение полуавтоматической калибровки оптико-электронного канала наведения СЦУ после воздействия на него вибрационных или ударных нагрузок. Техническим результатом, на достижение которого направлено заявленное изобретение, является повышение эффективности применения ПЗРК. 9 ил.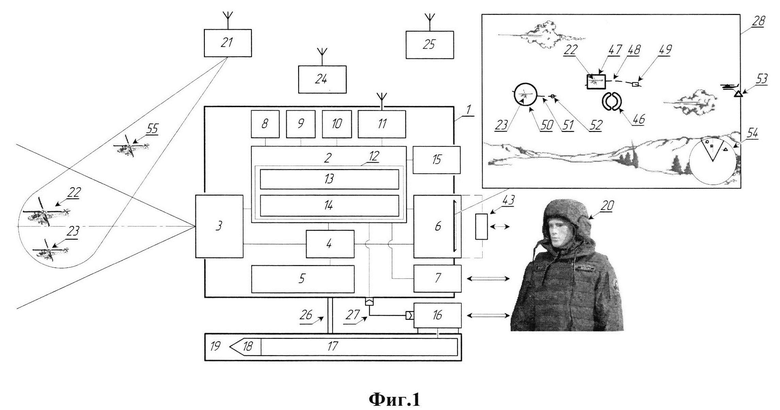
Способ комплексного применения переносных зенитно-ракетных комплексов (ПЗРК) со средствами внешнего целеуказания, включающий прием значений координат 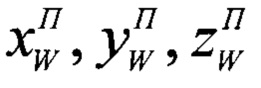 в системе общегеографических координат в случае отсутствия спутникового сигнала, прием с гироскопического датчика значений углов
в системе общегеографических координат в случае отсутствия спутникового сигнала, прием с гироскопического датчика значений углов  пространственной ориентации системы целеуказания (СЦУ), прием с магнитного датчика значения угла
пространственной ориентации системы целеуказания (СЦУ), прием с магнитного датчика значения угла  ориентации СЦУ относительно направления на север, прием напрямую или посредством радиостанции от удаленной радиолокационной станции (РЛС) или системы управления тактическим звеном координат
ориентации СЦУ относительно направления на север, прием напрямую или посредством радиостанции от удаленной радиолокационной станции (РЛС) или системы управления тактическим звеном координат  воздушных целей, подачу звукового сигнала о приеме целеуказания, отображение местоположения цели на дисплее СЦУ, визуальное обнаружение воздушных целей и наведение на них ПЗРК, отличающийся тем, что СЦУ, выполненную в виде легкого компактного единого моноблока с возможностью крепления на ПЗРК, включающую по крайней мере блок обработки информации с памятью, оптико-электронный канал (ОЭК), блок электропитания, аккумуляторную батарею, дисплей, панель управления, датчик координат, гироскопический датчик, магнитный датчик, блок обмена данными и звуковой сигнализатор, закрепляют на ПЗРК таким образом, чтобы поле зрения головки самонаведения (ГСН) зенитной управляемой ракеты (ЗУР) было согласовано с положением прицельной марки СЦУ, при необходимости калибруют СЦУ в режиме калибровки, для чего наводят прицельную марку СЦУ на контрастный объект, проводят захват участка изображения объекта, после чего совершают плавные вертикальные и горизонтальные угловые колебания СЦУ таким образом, чтобы захваченное изображение объекта перемещалось на изображении СЦУ последовательно вверх-вниз, вправо-влево до краев изображения, но не выходя за его пределы, при этом для каждого j-го кадра изображения проводят фиксацию участка изображения удаленного объекта и формируют с записью в память СЦУ массив PP пиксельных координат nj, mj и соответствующие массивы Bα и Bβ значений горизонтальных αj и вертикальных βj углов:
воздушных целей, подачу звукового сигнала о приеме целеуказания, отображение местоположения цели на дисплее СЦУ, визуальное обнаружение воздушных целей и наведение на них ПЗРК, отличающийся тем, что СЦУ, выполненную в виде легкого компактного единого моноблока с возможностью крепления на ПЗРК, включающую по крайней мере блок обработки информации с памятью, оптико-электронный канал (ОЭК), блок электропитания, аккумуляторную батарею, дисплей, панель управления, датчик координат, гироскопический датчик, магнитный датчик, блок обмена данными и звуковой сигнализатор, закрепляют на ПЗРК таким образом, чтобы поле зрения головки самонаведения (ГСН) зенитной управляемой ракеты (ЗУР) было согласовано с положением прицельной марки СЦУ, при необходимости калибруют СЦУ в режиме калибровки, для чего наводят прицельную марку СЦУ на контрастный объект, проводят захват участка изображения объекта, после чего совершают плавные вертикальные и горизонтальные угловые колебания СЦУ таким образом, чтобы захваченное изображение объекта перемещалось на изображении СЦУ последовательно вверх-вниз, вправо-влево до краев изображения, но не выходя за его пределы, при этом для каждого j-го кадра изображения проводят фиксацию участка изображения удаленного объекта и формируют с записью в память СЦУ массив PP пиксельных координат nj, mj и соответствующие массивы Bα и Bβ значений горизонтальных αj и вертикальных βj углов:
для каждого сохраненного значения углов αj и βj вычисляют координаты  ,
,  фактического положения изображения удаленного объекта в системе координат СЦУ согласно выражениям:
фактического положения изображения удаленного объекта в системе координат СЦУ согласно выражениям:

для каждого j-го значения пиксельных координат nj, mj вычисляют координаты  ,
,  расчетного положения изображения удаленного объекта в СК СЦУ согласно выражению:
расчетного положения изображения удаленного объекта в СК СЦУ согласно выражению:

где  - матрица внутренних параметров ОЭК, вычисляют массивы разностей ΔX и ΔY в горизонтальной и вертикальной плоскостях между расчетными и фактическими положениями изображений удаленного объекта согласно выражениям:
- матрица внутренних параметров ОЭК, вычисляют массивы разностей ΔX и ΔY в горизонтальной и вертикальной плоскостях между расчетными и фактическими положениями изображений удаленного объекта согласно выражениям:

аппроксимируют массивы разностей ΔX и ΔY с помощью полиноминальных зависимостей q-го порядка

а вычисленные коэффициенты а0, a1, …, aq-1, aq и b0, b1, …, bq-1, bq сохраняют в память СЦУ для дальнейшей работы, при ведении стрельбы в городских, горных или лесных условиях, когда прямую видимость цели закрывают препятствия: рельеф местности, здания, сооружения, растительность, определяют границу прямой видимости целей на изображении СЦУ, при этом если область прямой видимости не имеет различимой границы с областью, закрытой препятствием, то границу прямой видимости задают перед боевым применением ПЗРК в ручном режиме путем последовательного перемещения прицельной марки СЦУ вдоль границы между областью прямой видимости и препятствием с последовательным считыванием через g-й интервал с гироскопического датчика и магнетометра и записью в память СЦУ значений пар углов αg и βg в виде массива

где αg - угол в горизонтальной плоскости относительно направления на север на g-ю точку  ; βg - угол в вертикальной плоскости между горизонтальной линией и g-й точкой
; βg - угол в вертикальной плоскости между горизонтальной линией и g-й точкой  , если область прямой видимости имеет различимый контраст с областью, закрытой препятствием, то границу данной области определяют в автоматическом режиме путем обработки изображения СЦУ как предварительно, так и непосредственно в процессе наведения ПЗРК в виде массива GP пиксельных координат ng и mg:
, если область прямой видимости имеет различимый контраст с областью, закрытой препятствием, то границу данной области определяют в автоматическом режиме путем обработки изображения СЦУ как предварительно, так и непосредственно в процессе наведения ПЗРК в виде массива GP пиксельных координат ng и mg:

из принятых координат  W-х воздушных целей записывают и сохраняют в память СЦУ массивы
W-х воздушных целей записывают и сохраняют в память СЦУ массивы
где W - номер цели в массиве  ; i - порядковый номер массива, характеризующего обновление данных о целях, для каждого i-го массива
; i - порядковый номер массива, характеризующего обновление данных о целях, для каждого i-го массива  регистрируют момент принятия данных
регистрируют момент принятия данных  , для каждой пары массивов
, для каждой пары массивов  и
и вычисляют массив
вычисляют массив  скоростей движения воздушных целей:
скоростей движения воздушных целей:

для каждого кадра изображения вычисляют действительное положение цели на текущий момент времени tД относительно последнего i+1-го массива данных

для каждой цели относительно действительного времени tД в пределах временного отрезка (tД-tv, …, tД, …, tД+th), где tv и th временные интервалы прошедшего и прогнозируемого положений целей, проводят экстраполяцию изменений их координат и находят массивы траекторий

из памяти СЦУ принимают данные о внутренних параметрах ОЭК: ƒП - значение фокусного расстояния объектива ОЭК СЦУ;  и
и  - линейные размеры в горизонтальной и вертикальной плоскостях пикселя фотоприемного устройства ОЭК; NП и MП - горизонтальное и вертикальное разрешение фотоприемного устройства ОЭК; а0, а1, …, aq-1, aq и b0, b1, …, bq-1, bq, далее массивы координат целей для действительного момента времени
- линейные размеры в горизонтальной и вертикальной плоскостях пикселя фотоприемного устройства ОЭК; NП и MП - горизонтальное и вертикальное разрешение фотоприемного устройства ОЭК; а0, а1, …, aq-1, aq и b0, b1, …, bq-1, bq, далее массивы координат целей для действительного момента времени  , последнего приема данных
, последнего приема данных  и массивы траекторий
и массивы траекторий  преобразуют из мировой системы координат (СК) в СК СЦУ в соответствии с выражениями:
преобразуют из мировой системы координат (СК) в СК СЦУ в соответствии с выражениями:



где  - матрица поворота осей СК СЦУ относительно осей мировой СК;
- матрица поворота осей СК СЦУ относительно осей мировой СК;
 - расширенная до размерности массивов
- расширенная до размерности массивов  ,
,  и
и  матрица, построенная из векторов
матрица, построенная из векторов  положения СК OПXПYПZП в СК OWXWYWZW;
положения СК OПXПYПZП в СК OWXWYWZW;
при этом для каждой цели назначают свою форму области выделения и в соответствии со значениями массива координат  для действительного момента времени tД отображают цели в виде маркеров на миникарте на цифровом изображении СЦУ, кроме этого на миникарте цифрового изображения СЦУ отображают положение оптической оси и поле зрения ОЭК, проецируют координаты массивов
для действительного момента времени tД отображают цели в виде маркеров на миникарте на цифровом изображении СЦУ, кроме этого на миникарте цифрового изображения СЦУ отображают положение оптической оси и поле зрения ОЭК, проецируют координаты массивов  ,
,  и
и  на плоскость изображения СЦУ в соответствии с выражениями:
на плоскость изображения СЦУ в соответствии с выражениями:



где
 - проекционные матрицы, задают массивы
- проекционные матрицы, задают массивы  ,
,  ,
,  коррекции:
коррекции:

где 
корректируют значения массивов  ,
,  и
и  в соответствии с выражениями:
в соответствии с выражениями:



находят и сохраняют в память СЦУ массив Ω текущих горизонтальных и вертикальных углов на цели  согласно выражению:
согласно выражению:
преобразуют трехмерные координаты массивов  ,
,  и
и  в пиксельные плоские координаты на изображении СЦУ согласно выражениям:
в пиксельные плоские координаты на изображении СЦУ согласно выражениям:



согласно данным массивов  ,
,  и
и  на каждом кадре цифрового изображения СЦУ отображают области действительного положения целей, области последнего обновления данных о целях, траектории движения целей, при этом размеры областей действительного положения целей на изображении задают размерами, сопоставимыми с размером прицельной марки СЦУ, размеры областей последнего обновления данных о целях задают следующим образом: если скорость движения цели и скорость обновления данных о ней таковы, что графически область действительного положения целей будет перекрывать своими границами область последнего обновления данных, то отображают только область действительного положения целей, а форму областей выделения для каждой цели задают индивидуально в виде геометрического примитива заданной заранее формы; если пиксельные координаты положения цели выходят за границы изображения СЦУ, то положение цели отображают в форме тактического знака или комбинации уменьшенной формы выделения с тактическим знаком цели на краю изображения СЦУ в той строке или столбце, которые своими значениями не вышли на границы изображения, ориентируясь по положению маркеров целей на миникарте, а также по положению маркеров целей в поле зрения СЦУ, наводят ПЗРК на выбранную цель, после чего совмещают прицельную марку СЦУ и область действительного положения цели, при этом если цель находится в зоне прямой видимости, то в ручном режиме подают сигнал в пусковое устройство ПЗРК на захват цели ГСН и дальнейший пуск ЗУР, а после поражения цели или смены приоритета наводят ПЗРК на следующую цель и повторяют аналогичные действия по ее поражению, если же применение ПЗРК осуществляется на местности с ограниченными секторами наблюдения, цель находится вне зоны прямой видимости, а условия наблюдения таковы, что область прямой видимости имеет различимый контраст с областью перекрытия цели препятствием, то пуск из ПЗРК проводят в автоматическом режиме, для чего наводят ПЗРК на цель путем совмещения прицельной марки СЦУ и области действительного положения цели, сопровождают цель, удерживая прицельную марку СЦУ на области действительного положения цели, при этом в автоматическом режиме задают координаты массивом GP согласно выражению (7), сопоставляют пиксельные координаты
на каждом кадре цифрового изображения СЦУ отображают области действительного положения целей, области последнего обновления данных о целях, траектории движения целей, при этом размеры областей действительного положения целей на изображении задают размерами, сопоставимыми с размером прицельной марки СЦУ, размеры областей последнего обновления данных о целях задают следующим образом: если скорость движения цели и скорость обновления данных о ней таковы, что графически область действительного положения целей будет перекрывать своими границами область последнего обновления данных, то отображают только область действительного положения целей, а форму областей выделения для каждой цели задают индивидуально в виде геометрического примитива заданной заранее формы; если пиксельные координаты положения цели выходят за границы изображения СЦУ, то положение цели отображают в форме тактического знака или комбинации уменьшенной формы выделения с тактическим знаком цели на краю изображения СЦУ в той строке или столбце, которые своими значениями не вышли на границы изображения, ориентируясь по положению маркеров целей на миникарте, а также по положению маркеров целей в поле зрения СЦУ, наводят ПЗРК на выбранную цель, после чего совмещают прицельную марку СЦУ и область действительного положения цели, при этом если цель находится в зоне прямой видимости, то в ручном режиме подают сигнал в пусковое устройство ПЗРК на захват цели ГСН и дальнейший пуск ЗУР, а после поражения цели или смены приоритета наводят ПЗРК на следующую цель и повторяют аналогичные действия по ее поражению, если же применение ПЗРК осуществляется на местности с ограниченными секторами наблюдения, цель находится вне зоны прямой видимости, а условия наблюдения таковы, что область прямой видимости имеет различимый контраст с областью перекрытия цели препятствием, то пуск из ПЗРК проводят в автоматическом режиме, для чего наводят ПЗРК на цель путем совмещения прицельной марки СЦУ и области действительного положения цели, сопровождают цель, удерживая прицельную марку СЦУ на области действительного положения цели, при этом в автоматическом режиме задают координаты массивом GP согласно выражению (7), сопоставляют пиксельные координаты  и
и  сопровождаемой цели из массива
сопровождаемой цели из массива  с массивом GP пиксельных координат ng и mg, описывающих границу прямой видимости, при этом из массива GP выбирают столбец
с массивом GP пиксельных координат ng и mg, описывающих границу прямой видимости, при этом из массива GP выбирают столбец  , в котором значение mg имеет максимальную близость со значением
, в котором значение mg имеет максимальную близость со значением  массива
массива  , вычисляют разность
, вычисляют разность  , и как только значение разности Δn станет положительным, т.е. сопровождаемая цель перешла в область прямой видимости, то в автоматическом режиме подают команду в пусковое устройство ПЗРК на захват цели ГСН и дальнейший пуск по ней ЗУР, если применение ПЗРК осуществляется на местности с ограниченными секторами наблюдения, цель находится вне зоны прямой видимости, а условия наблюдения таковы, что область прямой видимости не имеет различимого контраста с областью перекрытия цели препятствием, то пуск из ПЗРК проводят в полуавтоматическом режиме, для чего перед применением ПЗРК в ручном режиме обозначают границу прямой видимости с записью массива GΔ согласно выражению (6), наводят ПЗРК на цель путем совмещения прицельной марки СЦУ и области действительного положения цели, сопровождают цель, удерживая прицельную марку на области действительного положения цели, одновременно принимая из памяти СЦУ массив Ω, сопоставляют массив GΔ со значениями массива Ω, при этом из массива GΔ выбирают столбец
, и как только значение разности Δn станет положительным, т.е. сопровождаемая цель перешла в область прямой видимости, то в автоматическом режиме подают команду в пусковое устройство ПЗРК на захват цели ГСН и дальнейший пуск по ней ЗУР, если применение ПЗРК осуществляется на местности с ограниченными секторами наблюдения, цель находится вне зоны прямой видимости, а условия наблюдения таковы, что область прямой видимости не имеет различимого контраста с областью перекрытия цели препятствием, то пуск из ПЗРК проводят в полуавтоматическом режиме, для чего перед применением ПЗРК в ручном режиме обозначают границу прямой видимости с записью массива GΔ согласно выражению (6), наводят ПЗРК на цель путем совмещения прицельной марки СЦУ и области действительного положения цели, сопровождают цель, удерживая прицельную марку на области действительного положения цели, одновременно принимая из памяти СЦУ массив Ω, сопоставляют массив GΔ со значениями массива Ω, при этом из массива GΔ выбирают столбец  , в котором значение αg имеет максимальную близость со значением
, в котором значение αg имеет максимальную близость со значением  , вычисляют разность
, вычисляют разность  , и как только значение разности Δβ станет отрицательным, т.е. сопровождаемая воздушная цель переместится из-за препятствия в область прямой видимости, то в автоматическом режиме подают команду в пусковое устройство на захват цели ГСН и дальнейший пуск по ней ЗУР.
, и как только значение разности Δβ станет отрицательным, т.е. сопровождаемая воздушная цель переместится из-за препятствия в область прямой видимости, то в автоматическом режиме подают команду в пусковое устройство на захват цели ГСН и дальнейший пуск по ней ЗУР.
| Способ обеспечения автоматизации стрельбы группы переносных зенитно-ракетных комплексов и устройство для его осуществления | 2016 |
|
RU2662766C1 |
| Станок для раскалывания кристаллов слюды | 1957 |
|
SU112754A1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ЦЕЛЕУКАЗАНИЯ НА ПОЛЕ БОЯ С ДОРАЗВЕДКОЙ ЦЕЛИ | 2020 |
|
RU2747740C1 |
| US 20220026180 A1, 27.01.2022 | |||
| DE 19638968 A1, 26.03.1998. | |||

