Область техники
[1] Настоящее изобретение относится системам и способам управления буровыми работами, обеспечивающими автоматизированную работу буровых станков. Система обеспечивает точное автоматизированное передвижение буровых станков благодаря использованию высокоточного позиционирования, а также позволяет отслеживать процессы передвижения и работы буровых станков, получать данные с бортового компьютера и обрабатывать их для оптимизации логистики работы и для формирования отчетов, необходимых для построения рабочих процессов.
Уровень техники
[2] Системы управления буровыми работами зачастую включают в себя центральный вычислительный компьютер или сервер, датчики измерения параметров бурения, систему навигации и буровой станок. Центральный вычислительный компьютер или сервер получает данные с бортового компьютера, обрабатывает данные и передает команды на бортовой компьютер для оператора бурового станка. Датчики служат для различных целей. Например, в случае работы с буровыми скважинами для добычи полезных ископаемых используют датчики давления, которые предназначены для измерения давления бурового расхода на входе в скважину и в затрубном пространстве, датчики расхода бурового раствора, предназначенные для оценки расхода бурового раствора на входе и выходе из скважины, и многие другие. А в случае работы с буровыми установки, производящими бурение для последующих взрывных работ, используют датчики для определения момента вращения, определения давления на забой, для определения давления воздуха и т.д. Система навигации необходима для ориентирования среди скважин, а сам буровой станок для бурения и передвижения. В целях сделать систему автоматизированной зачастую добавляют устройства сопряжения с буровым станком и подключают к нему все органы управления, которые он берет под свой контроль. Устройства сопряжения являются программируемыми логическими контроллерами и служат для передачи соответствующих команд, полученных на бортовой компьютер от центрального вычислительного компьютера или сервера, буровому станку при помощи широтно-импульсной модуляции, токовых сигналов, дискретных – логических – сигналов, команд по CAN-протоколу и т.д.
[3] В патенте US9593567B2 (опубл. 14.03.2017; МПК: E21B 44/00; E21B 44/02) описывается система бурения, содержащая датчик параметров бурения, связанный с приложением датчика, которое генерирует обработанные данные из необработанных данных, полученных от датчика параметров бурения. Приложение процесса взаимодействует с приложением датчика и генерирует инструкцию на основе обработанных данных. Контроллер приоритета связан с приложением процесса и оценивает инструкцию для передачи контроллеру оборудования, который затем выдает команду одному или нескольким компонентам бурения. Одним из недостатком данной системы является отсутствие автоматизации передвижения буровой установки. Также в вышеописанной системе отсутствуют компоненты, обеспечивающие высокоточную навигацию. Более того, из-за отсутствия автоматизации передвижения буровой установки для каждой буровой установки требуется по крайней мере два оператора, один из которых будет находится внутри кабины буровой установки, а другой – вне ее. Это значительно повышает количество человек, необходимых в штате для ведения буровых работ. Еще одним недостатком системы отсутствие датчиков-инклинометров или других датчик, способных рассчитывать корректное положение платформы и угла наклона скважины перед бурением. Использование подобного рода датчиков значительно уменьшает возможные ошибки при ведении буровых работ. Третий недостаток данной системы заключается в отсутствии сторожевых модулей – модулей, отвечающих за безопасность. Подобные модули необходимы к установке на буровых станках, как с автоматическим, так и с ручным управлением. Сторожевые модули непрерывно контролируют оборудование и могут экстренно отключить систему при неполадках какого-либо из ее компонент. Также отсутствие систем высокоточного позиционирования является еще одним недостатком, т.к. использование методов позиционирования высокой точности значительно уменьшают количество ошибок в работе систем управления бурением и повышают ее эффективность.
[4] В патенте US8131510B2 (опубл. 06.03.2012; МПК: G06F 19/00) раскрывается способ и структура для автоматизации диспетчерского управления буровой установкой, которая включает в себя репликацию и агрегирование панелей диспетчерского управления буровой установкой, механизм для управления параметрами панели диспетчерского управления с использованием одного или нескольких интеллектуальных алгоритмов, а также способ и технику для доступа к диспетчерскому управлению. панели управления из удаленного места. Система и способ дополнительно включают в себя запись, редактирование и воспроизведение последовательности параметров диспетчерского управления буровой установки во время любой типичной работы буровой установки. Такая последовательность включает запись всех действий, связанных с конкретной операцией оператора буровой установки. Эта последовательность сохраняется и может быть отредактирована для оптимизации последовательности и в дальнейшем воспроизведена на установке, с которой она была записана, или на любой другой установке в сети. Одним из недостатков данной системы является отсутствие использования методов высокоточного позиционирования при работе бурильного станка на автопилоте, т.к. его использование значительно уменьшает количество возможных ошибок при автоматической навигации и увеличивает эффективность работы бурового станка. Второй недостаток заключается в отсутствии независимого сторожевого модуля на борту бурового станка. Подобные модули необходимы к установке на буровых станках, как с автоматическим, так и с ручным управлением. Сторожевые модули непрерывно контролируют оборудование и могут экстренно отключить систему при неполадках какого-либо из ее компонент. Еще одним недостатком системы отсутствие датчиков-инклинометров или других датчиков, способных рассчитывать корректное положение платформы и угла наклона скважины перед бурением. Использование подобного рода датчиков значительно уменьшает возможные ошибки при ведении буровых работ и ускоряет проведение ряда операций.
[5] В патенте US9404356B2 (опубл. 02.08.2016; МПК: E21B 44/02; E21B 47/024) предложены система и способ бурения с управляемой поверхностью. В одном примере система принимает информацию обратной связи от буровой установки и вычисляет предполагаемое положение бурового долота в пласте на основе информации обратной связи. Система сравнивает расчетное положение с желаемым положением вдоль запланированной траектории ствола скважины. Система вычисляет несколько решений, если сравнение показывает, что расчетное положение выходит за пределы определенной погрешности относительно желаемого положения. Каждое решение определяет путь от предполагаемой позиции до запланированного пути. Система рассчитывает стоимость каждого решения и выбирает одно из решений, по крайней мере, частично на основе стоимости. Система выдает управляющую информацию, представляющую выбранное решение, и выдает управляющую информацию для буровой установки. Данная система служит в качестве помощи оператору при выставлении станка над скважиной с целью коррекции действий оператора, если он недостаточно точно выставил станок. Первым отличием является то, что в настоящем изобретении сначала рассчитывают, а затем выставляют буровой станок. И если после выполненных операций оказывается, что станок стоит неровно, автоматически отрабатывается субалгоритм корректировки положения. С помощью устройства сопряжения собирают информацию, в основном, с концевых датчиков, все остальные передают данные либо прямо на шину CAN, либо по сетевому протоколу. Одним из недостатков данной системы является отсутствие использования методов высокоточного позиционирования при работе бурильного станка на автопилоте, т.к. его использование значительно уменьшает количество возможных ошибок при автоматической навигации и увеличивает эффективность работы бурильного станка. Еще один недостаток заключается в отсутствии сторожевого модуля на борту бурильного станка. Подобные модули необходимы к установке на буровых станках, как с автоматическим, так и с ручным управлением. Сторожевые модули непрерывно контролируют оборудование и могут экстренно отключить систему при неполадках какого-либо из ее компонент.
[6] В патенте RU2667545C1 (опубл. 21.09.2018; МПК: E21B 44/00; G05B 19/4184 G06F 19/00) описывается изобретение, относящееся к управлению буровой установкой. Техническим результатом является координация управления множеством подсистем буровой установки. Система содержит первый уровень, содержащий множество контроллеров подсистем, соединенных с множеством подсистем буровой установки, при этом множество контроллеров подсистем выполнены с возможностью управления рабочими параметрами множества подсистем буровой установки, второй уровень, выполненный с возможностью получения информации из первого уровня на основании функционирования множества подсистем буровой установки, и обеспечения управления множеством подсистем буровой установки, и третий уровень, выполненный с возможностью выполнения одного или нескольких технологических приложений и предоставления основанной на описании задач команды на второй уровень. Одним из недостатков данной системы является использование отдельных контроллеров для каждой подсистемы буровой установки. Использование различных контроллеров для каждой из подсистем буровой установки является дорогостоящим и требующим множество вычислительных ресурсов. Данная система предусмотрена для буровых станков, в которых управляющие контроллеры физически разнесены в пространстве. Устройство сопряжения в рамках настоящего изобретения выполнено в модульном виде, благодаря чему устройство сопряжения может легко подключаться как к буровым станкам, управляющие контроллеры которых физически разнесены в пространстве, так и к станкам, с единым управляющим контроллером. Также в составе буровой установки отсутствует сторожевой модуль на борту. Подобные модули необходимы к установке на буровых станках, как с автоматическим, так и с ручным управлением. Сторожевые модули непрерывно контролируют оборудование и могут экстренно отключить систему при неполадках какого-либо из ее компонент. Еще одним недостатком данной системы является отсутствие использования методов высокоточного позиционирования при работе бурильного станка на автопилоте, т.к. его использование значительно уменьшает количество возможных ошибок при автоматической навигации и увеличивает эффективность работы бурильного станка.
[7] Наиболее близким аналогом является RU2713072C2 (опубл. 03.02.2020; МПК: E21B 44/00; G05B 19/418; G06F 17/50), в которой описывается изобретение, относящееся к буровым установкам и, более конкретно, к единой системе управления для буровых установок. Техническим результатом является управление буровой установкой несколькими объектами. Способ включает прием в контроллере буровой установки данных от множества подсистем буровой установки, определение в контроллере буровой установки первой команды, основанной, по меньшей мере частично, на данных от множества подсистем буровой установки, причем первая команда относится к рабочему параметру первого устройства первой из множества подсистем буровой установки, и передачу первой команды первому контроллеру подсистемы первой из множества подсистем буровой установки, причем первый контроллер подсистемы выполнен с возможностью управления первым устройством и реализации указанной команды. Одним из недостатков данной системы является использование отдельных контроллеров для каждой подсистемы буровой установки. Использование различных контроллеров для каждой из подсистем буровой установки является дорогостоящим и требующим множество вычислительных ресурсов. Также в составе буровой установки отсутствует сторожевой модуль на борту. Подобные модули необходимы к установке на буровых станках, как с автоматическим, так и с ручным управлением. Сторожевые модули непрерывно контролируют оборудование и могут экстренно отключить систему при неполадках какого-либо из ее компонент. Еще одним недостатком данной системы является отсутствие использования методов высокоточного позиционирования при работе бурильного станка на автопилоте, т.к. его использование значительно уменьшает количество возможных ошибок при автоматической навигации и увеличивает эффективность работы бурильного станка.
Сущность изобретения
[8] Задачей настоящего изобретения является создание и разработка системы и способа управления буровыми работами, обеспечивающих эффективное и безопасное управление буровыми работами с высокоточной навигацией беспилотного бурового станка.
[9] Указанная задача достигается благодаря такому техническому результату, как безопасность и эффективность управления буровыми работами, точность навигации бурового станка и возможность беспилотного управления бурового станка, в том числе:
• обеспечение беспилотного управления буровым станком любого типа;
• обеспечение безопасности системы посредством мониторинга ее компонент и инициирования аварийной остановки системы, в случае выхода из строя по крайней мере одного из них;
• повышение точности определения местоположения бурового станка, а также его последующей навигации.
[10] Технический результат достигается системой управления буровыми работами, включающей главный компьютер и по крайней мере один буровой станок, включающий устройство сопряжения, бортовой компьютер, по крайней мере одну систему связи, по крайней мере один датчик-инклинометра и сторожевой модуль, причем устройство сопряжения подключено к бортовому компьютеру и буровому станку и осуществляет управление буровым станком посредством генерации специальных сигналов, а сторожевой модуль выполнен с возможностью мониторинга по крайней мере одного из компонент бурового станка и инициации аварийной остановки системы.
[11] При этом главный компьютер необходим для формирования команд для бурового станка и их отправки на буровой станок, а также для получения обратной связи от бурового станка. В обратную связь, получаемую от бурового станка, входит информация о состоянии техники, текущем статусе работ, координаты бурового станка и т.д. Буровой станок необходим для выполнения процесса бурения. Устройство сопряжения необходимо для управления буровым станком в беспилотном режиме. Оно предназначено для связи с каждым из компонент бурового станка и генерации сигналов с целью управления буровым станком. Бортовой компьютер необходим для получения команд от главного компьютера, передачи их на устройство сопряжения, а также для отправки обратной связи о статусе работ и информации о состоянии бурового станка. Система связи необходима для установления местоположения бурового станка в режиме реального времени, а также для установления связи между буровым станком и главным компьютером. Датчик-инклинометра необходим для расчета корректного положения платформы перед выполнением процесса бурения и расчета угла наклона скважины. Сторожевой модуль, подключенный к по крайней мере одному компоненту бурового станка, необходим для мониторинга состояния по крайней мере одного из компонент бурового станка, а также для инициации аварийной остановки, в случае выхода из строя по крайней мере одного из них. В частности, самыми важными компонентами бурового станка являются устройство сопряжения и бортовой компьютер, в случае выхода какого-либо из них в обязательном порядке инициируется аварийная остановка системы управления буровыми работами.
[12] Причем, главный компьютер может дополнительно быть расположен удаленно для управления работой бурового станка на любых расстояниях, а также может являться сервером.
[13] Возможность использования в качестве системы связи системы высокоточного позиционирования позволяет определять высокоточные координаты и значения азимута вектора движения в режиме реального времени. Причем, системы высокоточного позиционирования может включать в себя антенны и/или сети промышленного стандарта и/или резервный канал для определения всего ранее перечисленного.
[14] То, что буровой станок может дополнительно включать систему видеонаблюдения, позволяет внедрить машинное зрение, обеспечивающее контроль перемещения, технологических операций, окружающего пространства, состояния бурового станка и его узлов и безопасности маневров.
[15] То, что буровой станок может дополнительно включать систему предотвращения столкновений, включающую радары и/или сонары и/или лидары, позволяет своевременно оповестить бортовой компьютер о том, что буровой станок может столкнуться с препятствием, если не перестроит свой маршрут. При этом радары позволяют обнаружить объекты, а также определить их дальность, скорость и геометрические параметры, сонары позволяют обнаружить объекты при помощи акустического излучения, а лидары позволяют обнаружить удаленные объекты при помощи активной оптической системы, использующей явления поглощения и рассеяния света в оптически прозрачных средах, таких, как, например, воздух.
[16] Спутниковый ресивер, который может дополнительно включаться в бортовой компьютер, позволяет получать, обрабатывать и передавать спутниковые сигналы и сигналы поправок от базовой станции при необходимости.
[17] Программный вычислительный модуль, который может дополнительно включаться в бортовой компьютер, позволяет рассчитывать маршрут, делить его на сегменты и формировать последовательность команд для устройства сопряжения. Вычислительный модуль также обладает навигационно-вычислительными функциями.
[18] То, что устройство сопряжения может быть выполнено с возможностью генерации широтно-импульсной модуляции и/или токовых сигналов и/или дискретных сигналов и/или команд по CAN-протоколу, позволяет устройству сопряжения управлять любым известным буровым станком, а также отдельными его управляющими компонентами.
[19] Также заявленный технический результат достигается способом управления буровыми работами, по которому при помощи главного компьютера формируют команду для бурового станка и отправляют команду на буровой станок. После чего, при помощи бортового компьютера получают команду на буровой станок и отправляют команду на устройство сопряжения. Далее, при помощи устройства сопряжения получают команду, генерируют управляющий сигнал и отправляют сгенерированный управляющий сигнал на буровой станок. Затем исполняют команду посредством генерации управляющих сигналов устройством сопряжения на исполнительные механизмы бурового станка. При этом, при помощи сторожевого модуля в процессе работы мониторят по крайней мере один из компонент бурового станка и инициируют аварийную остановку при помощи сторожевого модуля.
[20] Причем, этап формирования команды для бурового станка необходим для определения того, что должен сделать буровой станок для достижения поставленной цели. Этап отправки команды на буровой станок и получения команды буровым станком необходим для того, чтобы буровой станок получил сформированные команды. Этап отправки команды на устройство сопряжения и получения команды устройством сопряжения необходим для получения устройством сопряжения сформированных команд. Этап генерации управляющих сигналов устройством сопряжения необходим для трансформирования сформированных команд в управляющие сигналы, понятные исполнительным механизмам бурового станка. Этап исполнения команды при помощи устройства сопряжения необходим для достижения поставленной цели, заданной командой. Мониторинг сторожевым модулем по крайней мере одного из компонент бурового станка и инициирование аварийной установки, в случае выхода из строя по крайней мере одного из них, необходим для предотвращения аварий и обеспечения безопасности работы системы.
[21] То, что командами, отправляемыми на буровой станок, могут являться команды на передвижение и/или на бурение позволяет главному компьютеру отправлять команды на передвижение бурового станка по маршруту и/или на бурение буровым станком скважины.
[22] То, что на этапе получения команды на передвижение могут сначала определять маршрут при помощи вычислительного модуля, позволяет вычислять оптимальный маршрут до цели. То, что после этапа определения маршрута могут делить маршрут на отдельные сегменты прохода и формировать последовательность команд для устройства сопряжения при помощи вычислительного модуля, позволяет определить и сформировать набор команд типа «проехать»/«повернуть», необходимых для проезда буровым станком определенного маршрута. То, что после этапа формирования последовательности команд для устройства сопряжения могут отправлять сформированные команды на устройство сопряжения, позволяет устройству сопряжения получить сформированные команды для последующего их исполнения посредством генерации управляющих сигналов для исполнительных механизмов бурового станка.
[23] То, что одновременно с этапом определения маршрута, делением его, формированием последовательности команд и отправкой сформированных команд могут непрерывно рассчитывать текущее положение бурового станка в реальном времени при помощи антенн и данных о поправках от базовой станции, позволяет дополнительно вносить корректировки в маршрут в ходе движения бурового станка. То, что после расчета текущего положения бурового станка в реальном времени могут делать поправки в последовательности команд при помощи вычислительного модуля, позволяет вносить поправки в маршрут бурового станка в режиме реального времени, в случае если заранее заданный маршрут оказался недостаточно точным и эффективным. Эффективность сравнивается по расчётному времени прохода вычисленного маршрута с тем, который был задан при создании задания.
[24] То, что перед этапом инициирования команды на передвижение бурового станка при помощи устройства сопряжения могут опрашивать антенны высокоточной навигации, датчики-инклинометры, систему предотвращения столкновений и вычислительный модуль, причем вычислительный модуль опрашивают о параметрах маршрута, позволяет системе управления буровыми работами сформировать наиболее точный и безопасный маршрут, такой, что на пути бурового станка не будет препятствий.
[25] То, что перед этапом инициирования команды на передвижение бурового станка при помощи устройства сопряжения могут опрашивать антенны высокоточной навигации и использовать данные поправок от базовой станции, датчики-инклинометры, систему предотвращения столкновений и вычислительный модуль, причем вычислительный модуль опрашивают о параметрах скважины, позволяет системе управления буровыми работами наиболее точно навестись на скважину так, что буровой станок впоследствии будет бурить более эффективно.
[26] То, что перед этапом инициирования команды на передвижение бурового станка при помощи устройства сопряжения могут опрашивать датчики-инклинометры, позволяет системе управления буровыми работами наиболее точно расположить буровой станок горизонтально скважине так, что буровой станок впоследствии будет бурить более эффективно.
[27] То, что перед этапом инициирования команды на бурение скважины буровым станком при помощи устройства сопряжения могут опрашивать датчики-инклинометра, датчики давления, концевые датчики, импульсные датчики и датчики двигателя, позволяет эффективно и безопасно для бурового станка и бурового инструмента бурить скважину.
[28] То, что в качестве датчиков двигателя могут использоваться датчики давления масла и/или датчики оборотов, позволяет контролировать работу двигателя бурового станка и мониторить его эффективность и работоспособность в режиме реального времени с возможностью внесения правок параметров работы в автоматическом режиме по заданному алгоритму либо оператором дистанционно, а также автоматически останавливать работу станка в случае выхода значений датчиков за пределы допустимых значений
[29] То, что перед этапом инициирования команды на бурение скважины буровым станком при помощи устройства сопряжения могут опрашивать датчики давления, концевые датчики, импульсные датчики и датчики двигателя, позволяет безопасно для бурового станка и бурового инструмента удлинять буровой став для инициации процесса бурения с соблюдением и поддержанием оптимальных параметров без превышения допустимых значений.
Описание чертежей
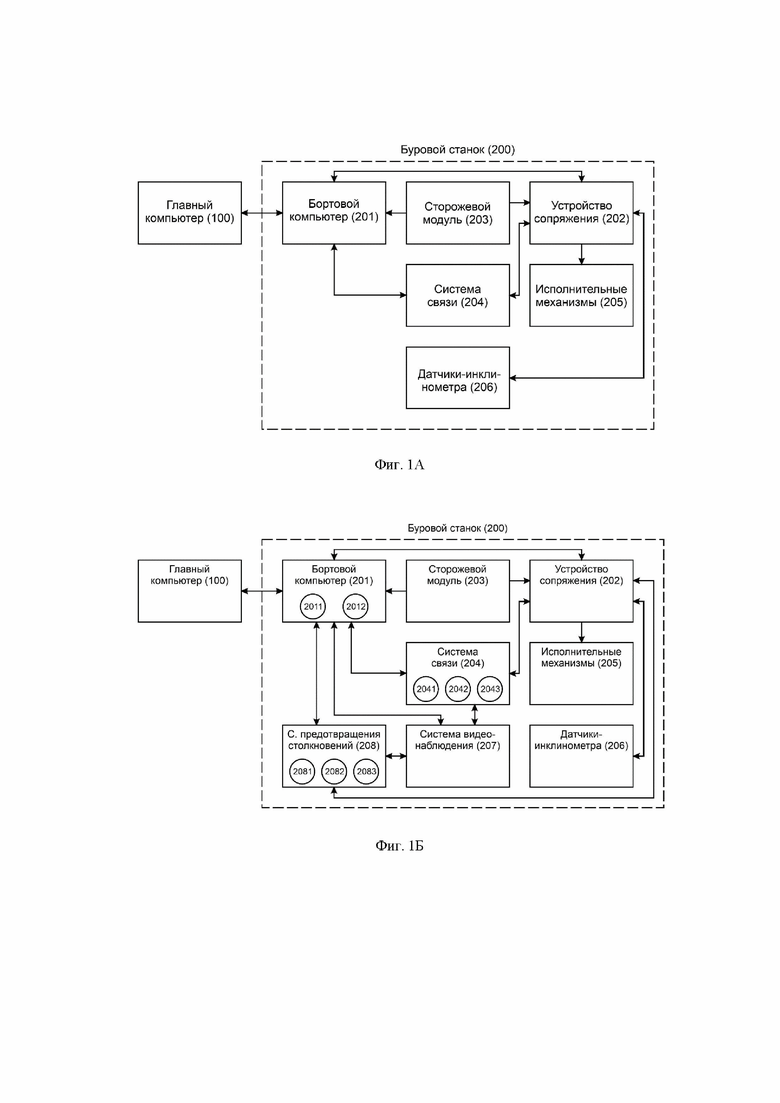
[30] На Фиг. 1А изображена схема системы управления буровыми работами согласно настоящему изобретению.
[31] На Фиг. 1Б изображена схема системы управления буровыми работами с дополнительными элементами согласно настоящему изобретению.
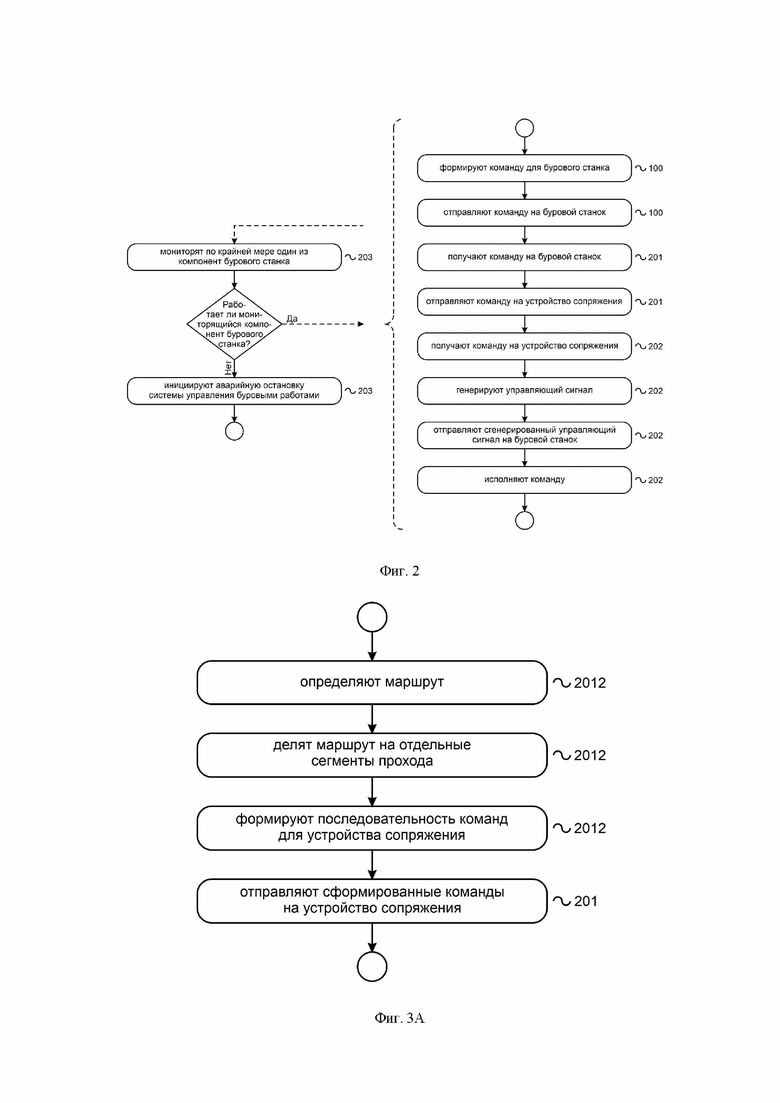
[32] На Фиг. 2 изображена блок-схема, иллюстрирующая способ управления буровыми работами согласно настоящему изобретению.
[33] На Фиг. 3А изображена блок-схема, иллюстрирующая последовательность формирования команды на передвижение согласно настоящему изобретению.
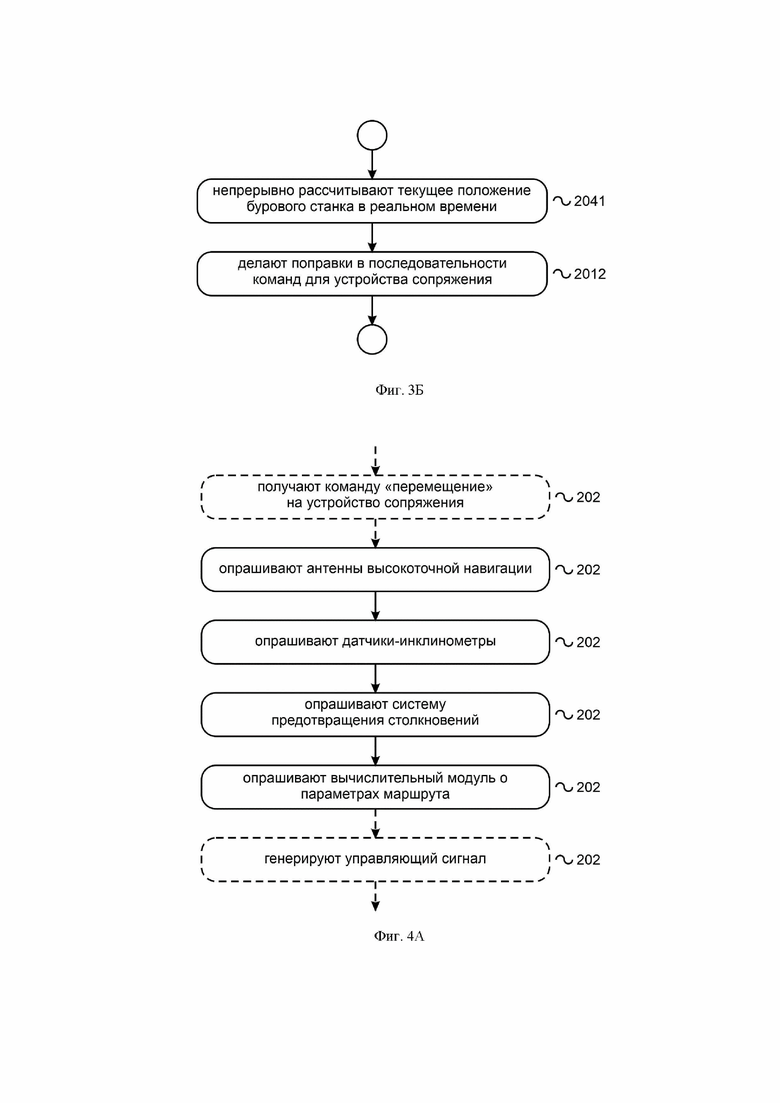
[34] На Фиг. 3Б изображена блок-схема, иллюстрирующая дополнительные этапы, производящиеся одновременно с последовательностью формирования команды на передвижение согласно настоящему изобретению.
[35] На Фиг. 4А изображена блок-схема, иллюстрирующая дополнительные этапы, предварительные инициированию команды перемещения.
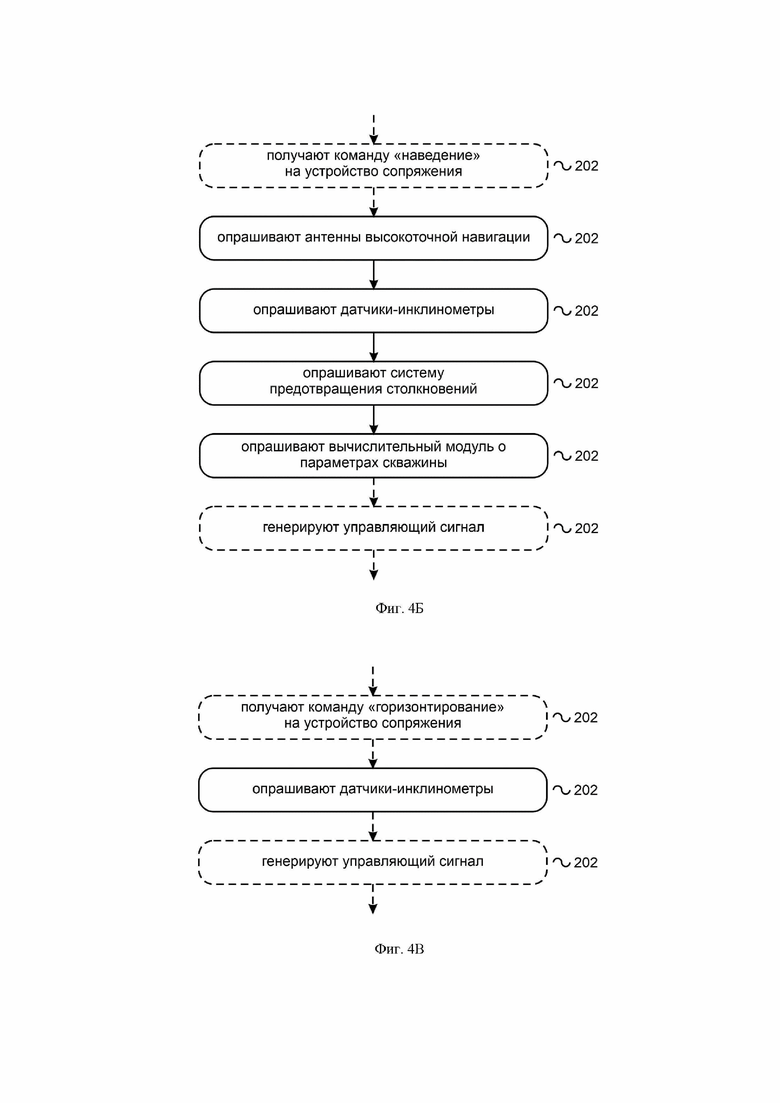
[36] На Фиг. 4Б изображена блок-схема, иллюстрирующая дополнительные этапы, предварительные инициированию команды наведения.
[37] На Фиг. 4В изображена блок-схема, иллюстрирующая дополнительные этапы, предварительные инициированию команды горизонтирования.
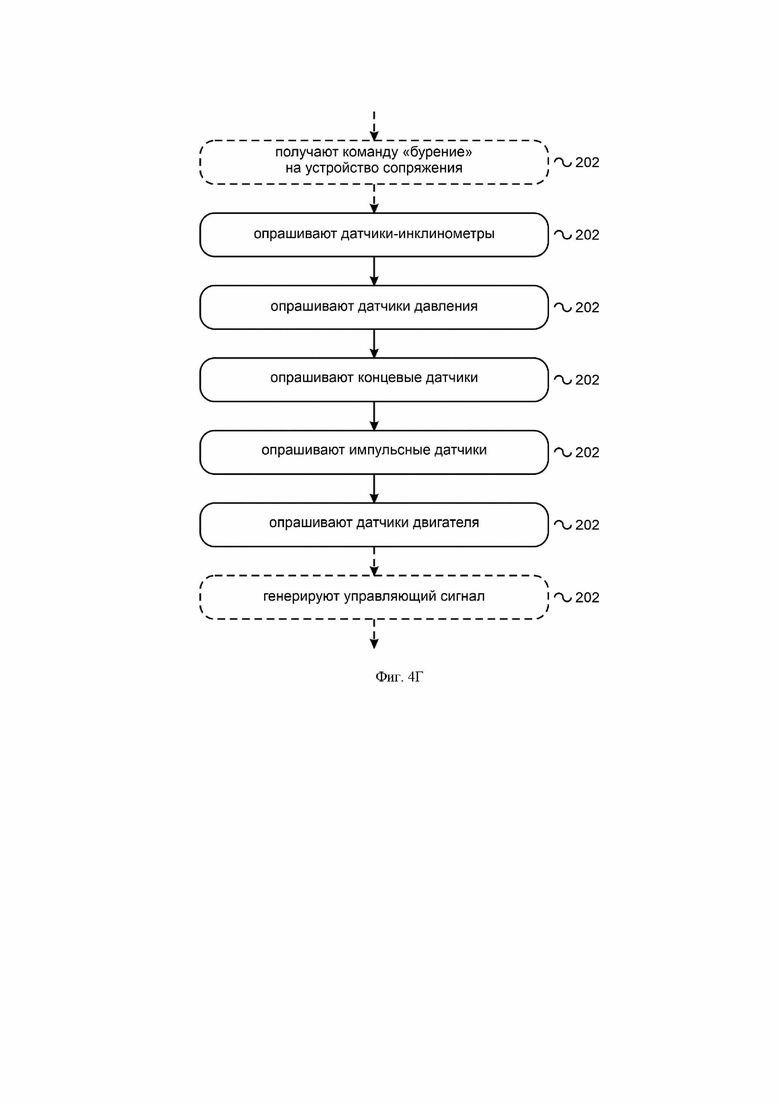
[38] На Фиг. 4Г изображена блок-схема, иллюстрирующая дополнительные этапы, предварительные инициированию команды бурения.
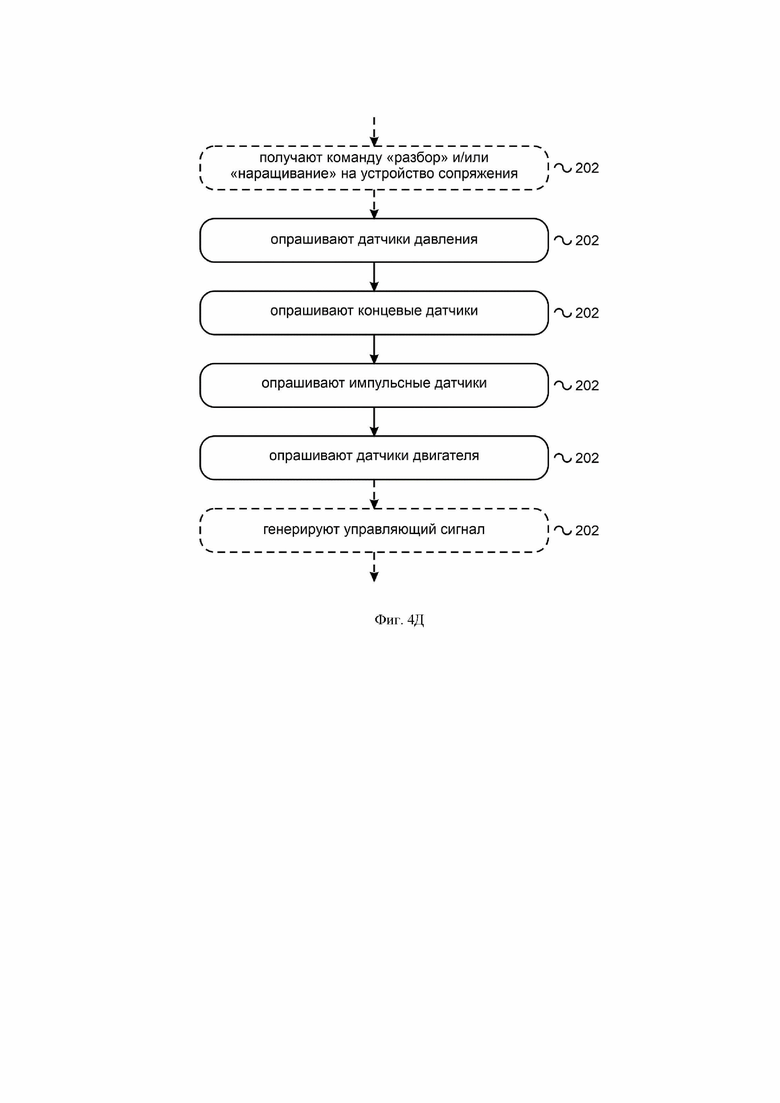
[39] На Фиг. 4Д изображена блок-схема, иллюстрирующая дополнительные этапы, предварительные инициированию команды наращивания и/или разбора.
Подробное описание
[40] В приведенном ниже подробном описании реализации изобретения приведены многочисленные детали реализации, призванные обеспечить отчетливое понимание настоящего изобретения. Однако, квалифицированному в предметной области специалисту очевидно, каким образом можно использовать настоящее изобретение, как с данными деталями реализации, так и без них. В других случаях, хорошо известные методы, процедуры и компоненты не описаны подробно, чтобы не затруднять излишнее понимание особенностей настоящего изобретения.
[41] Кроме того, из приведенного изложения ясно, что изобретение не ограничивается приведенной реализацией. Многочисленные возможные модификации, изменения, вариации и замены, сохраняющие суть и форму настоящего изобретения, очевидны для квалифицированных в предметной области специалистов.
[42] На Фиг. 1А изображена система управления буровыми работами. Система управления буровыми работами включает главный компьютер 100 и буровой станок 200. Буровой станок, в свою очередь, включает бортовой компьютер 201, устройство сопряжения 202, сторожевой модуль 203, по крайней мере одну систему связи 204, исполнительные механизмы 205 бурового станка 200 и по крайней мере один датчик-инклинометра 206. При этом, главный компьютер 100 подключен к бортовому компьютеру 201, а бортовой компьютер 201 подключен к устройству сопряжения 202 и системе связи 204. Устройство сопряжения 202 подключено к системе связи 204, исполнительным механизмам 205 бурового станка 200 и к датчикам-инклинометрам 206. Сторожевой модуль 203подклается к по крайней мере одному из компонент бурового станка 200. На Фиг. 1А сторожевой модуль 203 подключен к бортовому компьютеру 201 и устройству сопряжения 202.
[43] Система управления буровыми работами, показанная на Фиг. 1А, работает следующим образом. Главный компьютер 100 формирует команды для бурового станка 200 и отправляет их на бортовой компьютер 201 бурового станка 200. Бортовой компьютер 201 опрашивает систему связи 204, формирует команду для устройства сопряжения 202 и отправляет команду на устройство сопряжения 202. Устройство сопряжения 202, в свою очередь, опрашивает по крайней мере один из компонентов бурового станка 200, а затем переводит команду в управляющий сигнал и отправляет управляющий сигнал на исполнительные механизмы 205 бурового станка 200.
[44] Главный компьютер 100 может дополнительно быть расположен удаленно, например, быть выполнен в виде сервера.
[45] Устройство сопряжения 202 может быть выполнено с возможностью генерации широтно-импульсной модуляции и/или токовых сигналов и/или дискретных сигналов и/или команд по CAN-протоколу. Т.к. разные исполнительные механизмы 205 принимают разные типы сигналов в качестве команд, устройству сопряжения 202 необходимо преобразовывать полученные команды в подходящие для определенного исполнительного механизма 205 сигналы. Таким образом, данное устройство сопряжения 202 может отдавать команды всем исполнительным механизмам 205 бурового станка 200, а также получать от них обратную связь.
[46] Как показано на Фиг. 1Б, система управления буровыми работами может включать в себя дополнительные модули, некоторые из которых реализованы программно. Ниже описаны дополнительные компоненты системы управления буровыми работами согласно настоящему изобретению.
[47] В качестве системы связи 204 может быть использована система высокоточного позиционирования, включающая антенны высокоточного позиционирования 2041, сети промышленного стандарта 2042 и резервный канал 2043. Компоненты системы высокоточного позиционирования предназначены для определения высокоточных координат и значений азимута угла вектора движения. Эти данные они отправляют на бортовой компьютер 201 и устройство сопряжения 202 для обработки.
[48] Система управления буровыми работами может дополнительно включать систему видеонаблюдения 207, которая подключена к бортовому компьютеру 201 для внедрения машинного зрения, обеспечивающего контроль перемещения, технологических операций, окружающего пространства, состояния бурового станка и его узлов и безопасности маневров. Бортовой компьютер 201 может учитывать данные, собранные от системы видеонаблюдения 207 при формировании команд для устройства сопряжения 202. Система видеонаблюдения 207 также может подключаться к системе связи 204 для передачи ей необходимых данных.
[49] Система управления буровыми работами также может дополнительно включать систему предотвращения столкновений 208, включающую радары 2081 и/или сонары 2082 и/или лидары 2083. Система предотвращения столкновений 208 подключается к бортовому компьютеру 201 и устройству сопряжения 202 для корректировки маршрута бурового станка 200 с целью предотвращения столкновений. При этом, радары 2081 используются для радиообнаружения объектов, мешающих маршруту, а также для определения их дальности, скорости и геометрических параметров. Сонары 2082 используются для звукового обнаружения подводных объектов с помощью акустического излучения, а лидары 2083 базируются на технологии получения и обработки информации об удаленных объектах с помощью активных оптических систем, использующих явления поглощения и рассеяния света в оптических прозрачных средах таких, как, например, воздух. Таким образом, бортовой компьютер 201 при построении маршрута бурового станка 200 и его корректировки может связываться с системой предотвращения столкновений 208 и получать от нее данные об объектах-препятствиях, найденных радарами 2081 и/или сонарами 2082 и/или лидарами 2083. К системе предотвращения столкновений 208 подключается система видеонаблюдения 207 для осуществления передачи необходимых данных.
[50] Бортовой компьютер 201 может дополнительно включать спутниковый ресивер 2011 для получения данных на буровой станок 200 путем спутниковой связи. Например, антенны высокоточного позиционирования 2041 передают сигнал о своем местоположении на бортовой компьютер 201, который получает их благодаря спутниковому ресиверу 2011. Спутниковый ресивер 2011 также может принимать сигналы поправок от базовой станции.
[51] Также бортовой компьютер 201 может включать вычислительный модуль 2012, реализованный программно и обладающий функциями навигации. Вычислительный модуль 2012 отвечает за построение оптимального маршрута бурового станка 200 и корректировки этого маршрута в ходе движения. Также вычислительный модуль 2012 определяет эффективные параметры бурения, в случае поступления на бортовой компьютер 201 команды на бурение.
[52] Каждый из компонент бурового станка 200 может быть подключен к сторожевому модулю 203, который может осуществлять не только мониторинг их состояния, но также имеет возможность контроля их параметров. Например, к сторожевому модулю 203 можно подключить антенный высокоточной навигации 2041, в частности, можно выполнить это подключение на одной шине. В этом случае, сторожевой модуль 203 не только мониторит состояние антенн высокоточной навигации 2041, но и осуществляет контроль их параметров.
[53] На Фиг. 2 показана блок-схема, иллюстрирующая способ управления буровыми работами согласно настоящему изобретению. На первом этапе формируют команду для бурового станка 200 при помощи главного компьютера 100. Далее, посредством беспроводной сети отправляют команду на буровой станок 200 при помощи главного компьютера 100. Бортовой компьютер 201, включающийся в буровой станок 200, получает команду и отправляет ее на устройство сопряжения 202. После получения устройством сопряжения 202 команды от бортового компьютера 201, устройство сопряжения 202 генерирует управляющий сигнал и отправляет сгенерированный управляющий сигнал на буровой станок 200, в частности на его исполнительные механизмы 205. После чего команда исполняется. При этом, в процессе работы бурового станка 200 сторожевой модуль 203 мониторит по крайней мере один из его компонент и инициирует аварийную остановку, в случае выхода из строя по крайней мере одного из них. В первую очередь, сторожевой модуль 203 мониторит бортовой компьютер 201 и устройство сопряжения 202, но также имеет возможность мониторить каждый компонент бурового станка 200.
[54] Командами для бурового станка 200, получаемые от главного компьютера 100, могут являться команды на передвижение и/или на бурение.
[55] На Фиг. 3А изображена блок-схема, иллюстрирующая процесс, происходящий при получении бортовым компьютером 201 команды на передвижение. При поступлении команды на передвижение к конкретной точке вычислительный модуль 2012 бортового компьютера 201 сначала определяет маршрут движения с конечным положением бурового станка 200, затем делит этот маршрут на отдельные сегменты прохода и формирует последовательность команд на устройство сопряжения 202, а затем передаёт эти команды на устройство сопряжения 202.
[56] На Фиг. 3Б изображена блок-схема, иллюстрирующая дополнительные этапы, производящиеся одновременно с последовательностью формирования команды на передвижение согласно настоящему изобретению. Одновременно с определением маршрута, делением маршрута, формированием последовательности команд и отправкой сформированных команд непрерывно рассчитывают текущее положение бурового станка 200 в реальном времени при помощи антенн высокоточной навигации 2041, получают данные с антенн высокоточной навигации 2041 на спутниковый ресивер 2011 и делают поправки в последовательности команд при помощи вычислительного модуля 2012. Также поправки в последовательности команд вносят при помощи вычислительного модуля 2012 на основании данных, полученных от радаров 2081 и/или сонаров 2082 и/или лидаров 2083 системы предотвращения столкновений 208, и данных, полученных от системы видеонаблюдения 207. Например, если камеры системы видеонаблюдения 207 фиксируют препятствие на пути движения, происходит перерасчёт маршрута до намеченной точки и выполняется субалгоритм с последующим возвратом к основному алгоритму движения.
[57] В качестве команды на передвижение главным компьютером 100 может даваться команда на «перемещение» и/или «наведение» и/или «горизонтирование» бурового станка 200.
[58] На Фиг. 4А изображена блок-схема, иллюстрирующая дополнительные этапы, предварительные инициированию команды «перемещения». Под командой «перемещение» понимается передвижение бурового станка 200 от текущего положения к целевому, например, к следующей скважине. Перед инициированием команды «перемещения» устройство сопряжения 202 опрашивает антенны высокоточной навигации 2041, датчики-инклинометры 206, систему предотвращения столкновений 208 и вычислительный модуль 2012. Вычислительный модуль 2012 в этом случае опрашивается о параметрах маршрута.
[59] На Фиг. 4Б изображена блок-схема, иллюстрирующая дополнительные этапы, предварительные инициированию команды «наведение». После достижения координат скважины необходимо корректно расположить буровой станок 200 над ней под правильным углом, азимутом, заранее рассчитав положение бурового става после горизонтирования. Перед инициированием команды «наведение» устройство сопряжения 202 опрашивает антенны высокоточной навигации 2041, датчики-инклинометры 206, систему предотвращения столкновений 208 и вычислительный модуль 2012. Вычислительный модуль 2012 в этом случае опрашивается о параметрах скважины.
[60] На Фиг. 4В изображена блок-схема, иллюстрирующая дополнительные этапы, предварительные инициированию команды «горизонтирование». Под командой «горизонтирование» понимается поднятие платформы на домкратах с целью выравнивания относительно горизонта для устойчивого положения бурового станка 200 при бурении. Перед инициированием команды «горизонтирование» устройство сопряжения 202 опрашивает датчики-инклинометры 206.
[61] В качестве команды на бурение главным компьютером 100 может даваться команда на «бурение» и/или «наращивание» и/или «разбор».
[62] На Фиг. 4Г изображена блок-схема, иллюстрирующая дополнительные этапы, предварительные инициированию команды «бурение». Под командой «бурение» понимается непосредственное заглубление бурового инструмента на заданную глубину путём вращения, продувки скважины воздухом или водой и давлением на забой, т.е. опускание вращателя с усилием. Перед инициированием команды «бурение» устройство сопряжения 202 опрашивает датчики-инклинометры 206, датчики давления, концевые датчики, импульсные датчики и датчики двигателя. Датчики двигателя входят в систему контроля двигателя, которая является штатной системой компьютерного двигателя. В качестве датчиков двигателя могут присутствовать датчики давления масла и/или датчики оборота и т.д.
[63] На Фиг. 4Д изображена блок-схема, иллюстрирующая дополнительные этапы, предварительные инициированию команды «наращивание» и/или «разбор». В случае, если после завершения команды «бурение» оказывается, что скважина нужна более глубокая, посылаются команды «наращивание» и «разбор». «Наращивание» – операция удлинения бурового става путём раскручивания вращателя и первой штанги после фиксации последней ключом страгивания, поднятия вращателя наверх, накручивания второй, третьей и т.д. штанги из барабана карусели на вращатель и затем на первую штангу, после чего бурение продолжается дальше. Может случиться такое, что вторая штанга забуривается не на всю длину, а на некоторых скважинах и вовсе не требуется. Это может быть связано либо с особенностями залегания пород, либо с уклоном самого блока. «Разбор» – обратная операция, когда нижняя штанга, т.е. вторая от вращателя, также фиксируется, откручивается верхняя и устанавливается обратно в барабан карусели. Если штанг было больше 2, то операция повторяется, пока в ключе страгивания не останется самая первая штанга, на которую накручена шарошка либо долото. Она не разбирается, а остаётся на вращателе. Перед инициированием команды «наращивание» и/или «разбор» устройство сопряжения 202 опрашивает датчики давления, концевые датчики, импульсные датчики и датчики двигателя.
[64] В настоящих материалах заявки представлено предпочтительное раскрытие осуществления заявленного технического решения, которое не должно использоваться как ограничивающее иные, частные воплощения его реализации, которые не выходят за рамки запрашиваемого объема правовой охраны и являются очевидными для специалистов в соответствующей области техники. Предлагаемое изобретение может быть изготовлено на существующем оборудовании из известных материалов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА БУРЕНИЯ С АВТОМАТИЧЕСКИМ УТОЧНЕНИЕМ ТОЧЕК МАРШРУТА ИЛИ ТРАССЫ СТВОЛА СКВАЖИНЫ НА ОСНОВАНИИ КОРРЕКТИРОВКИ ДАННЫХ ИНКЛИНОМЕТРИИ | 2014 |
|
RU2657033C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОПРИВОДОМ | 2022 |
|
RU2789153C1 |
| АВТОМАТИЧЕСКОЕ ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ БУРИЛЬНОЙ КОЛОННЫ | 2005 |
|
RU2394986C2 |
| СИСТЕМА БУРЕНИЯ СКВАЖИНЫ С ОБРАТНОЙ СВЯЗЬЮ И ЗАМЕРОМ ГЛУБИНЫ | 2014 |
|
RU2678751C2 |
| Система передачи ответственной информации о маршрутах приема/отправления и кодах АЛС | 2018 |
|
RU2701274C1 |
| Система для контроля и регулирования мощности и энергии, расходуемой транспортной системой | 2023 |
|
RU2811608C1 |
| СПОСОБ РОТОРНОГО БУРЕНИЯ СКВАЖИН МОДУЛЬНОЙ УПРАВЛЯЕМОЙ СИСТЕМОЙ МАЛОГО ДИАМЕТРА | 2018 |
|
RU2687998C1 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| Система для контроля и регулирования мощности и энергии, расходуемой транспортной системой | 2016 |
|
RU2629622C1 |
| Автономный комплекс управления подвижным объектом, преимущественно в сложных навигационных условиях | 2016 |
|
RU2706434C2 |
Заявленная группа изобретений относится к системам и способам управления буровыми работами. Система управления буровыми работами включает главный компьютер и буровой станок, содержащий устройство сопряжения, бортовой компьютер, систему связи, датчик-инклинометр и сторожевой модуль. Устройство сопряжения подключено к бортовому компьютеру и буровому станку и выполнено с возможностью опроса по крайней мере одного из компонентов бурового станка, преобразования команд, полученных от бортового компьютера, и генерации управляющего сигнала для исполнительных механизмов бурового станка. Сторожевой модуль выполнен с возможностью мониторинга по крайней мере одного из компонентов бурового станка и инициации аварийной остановки системы, при этом система связи выполнена с возможностью определения координат и значений азимута угла вектора движения. Для осуществления способа управления буровыми работами формируют команду для бурового станка при помощи главного компьютера. Отправляют команду на буровой станок при помощи главного компьютера и получают команду на буровой станок при помощи бортового компьютера. Отправляют команду на устройство сопряжения при помощи бортового компьютера и получают команду на устройство сопряжения. Опрашивают по крайней мере один из компонентов бурового станка при помощи устройства сопряжения. Преобразовывают полученную команду и генерируют управляющий сигнал при помощи устройства сопряжения. Отправляют сгенерированный управляющий сигнал на буровой станок при помощи устройства сопряжения и исполняют команду при помощи устройства сопряжения. При помощи сторожевого модуля в процессе работы мониторят по крайней мере один из компонентов бурового станка и инициируют аварийную остановку при помощи сторожевого модуля. Достигается технический результат – повышение безопасности и эффективности управления буровыми работами, точности навигации бурового станка и возможности беспилотного управления. 2 н. и 15 з.п. ф-лы, 10 ил.
1. Система управления буровыми работами, включающая главный компьютер и по крайней мере один буровой станок, включающий устройство сопряжения, бортовой компьютер, по крайней мере одну систему связи, по крайней мере один датчик-инклинометр и сторожевой модуль, причем устройство сопряжения подключено к бортовому компьютеру и буровому станку и выполнено с возможностью:
• опроса по крайней мере одного из компонентов бурового станка;
• преобразования команд, полученных от бортового компьютера, и
• генерации управляющего сигнала для исполнительных механизмов бурового станка,
а сторожевой модуль выполнен с возможностью мониторинга по крайней мере одного из компонентов бурового станка и инициации аварийной остановки системы, при этом система связи выполнена с возможностью определения координат и значений азимута угла вектора движения.
2. Система управления буровыми работами по п. 1, отличающаяся тем, что главный компьютер расположен удаленно.
3. Система управления буровыми работами по п. 1, отличающаяся тем, что в качестве системы связи используется система высокоточного позиционирования, включающая антенны, и/или сети промышленного стандарта, и/или резервный канал.
4. Система управления буровыми работами по п. 1, отличающаяся тем, что буровой станок дополнительно включает систему видеонаблюдения.
5. Система управления буровыми работами по п. 1, отличающаяся тем, что буровой станок дополнительно включает систему предотвращения столкновений, включающую радары, и/или сонары, и/или лидары.
6. Система управления буровыми работами по п .1, отличающаяся тем, что бортовой компьютер дополнительно включает спутниковый ресивер.
7. Система управления буровыми работами по п. 1, отличающаяся тем, что бортовой компьютер дополнительно включает вычислительный модуль.
8. Система управления буровыми работами по п. 1, отличающаяся тем, что устройство сопряжения выполнено с возможностью генерации широтно-импульсной модуляции, и/или токовых сигналов, и/или дискретных сигналов, и/или команд по CAN-протоколу.
9. Способ управления буровыми работами, по которому:
• формируют команду для бурового станка при помощи главного компьютера;
• отправляют команду на буровой станок при помощи главного компьютера;
• получают команду на буровой станок при помощи бортового компьютера;
• отправляют команду на устройство сопряжения при помощи бортового компьютера;
• получают команду на устройство сопряжения;
• опрашивают по крайней мере один из компонентов бурового станка при помощи устройства сопряжения;
• преобразовывают полученную команду и генерируют управляющий сигнал при помощи устройства сопряжения;
• отправляют сгенерированный управляющий сигнал на буровой станок при помощи устройства сопряжения;
• исполняют команду при помощи устройства сопряжения;
при этом при помощи сторожевого модуля в процессе работы мониторят по крайней мере один из компонентов бурового станка и инициируют аварийную остановку при помощи сторожевого модуля.
10. Способ управления буровыми работами по п. 9, отличающийся тем, что для бурового станка отправляют команду на передвижение и/или на бурение.
11. Способ управления буровыми работами по пп. 9 и 10, отличающийся тем, что при получении команды на передвижение:
• определяют маршрут при помощи вычислительного модуля;
• делят маршрут на отдельные сегменты прохода при помощи вычислительного модуля;
• формируют последовательность команд для устройства сопряжения при помощи вычислительного модуля;
• отправляют сформированные команды на устройство сопряжения при помощи бортового компьютера.
12. Способ управления буровыми работами по пп. 9-11, отличающийся тем, что одновременно с определением маршрута, делением маршрута, формированием последовательности команд и отправкой сформированных команд:
• непрерывно рассчитывают текущее положение бурового станка в реальном времени при помощи антенн, включающихся в систему высокоточного позиционирования;
• делают поправки в последовательности команд при помощи вычислительного модуля.
13. Способ управления буровыми работами по п. 9, отличающийся тем, что при инициировании команды на передвижение при помощи устройства сопряжения предварительно:
• опрашивают антенны высокоточной навигации;
• опрашивают датчики-инклинометры;
• опрашивают систему предотвращения столкновений;
• опрашивают вычислительный модуль о параметрах маршрута.
14. Способ управления буровыми работами по п. 9, отличающийся тем, что при инициировании команды на передвижение при помощи устройства сопряжения предварительно
• опрашивают датчики-инклинометры.
15. Способ управления буровыми работами по п. 9, отличающийся тем, что при инициировании команды на бурение при помощи устройства сопряжения предварительно:
• опрашивают датчики-инклинометры;
• опрашивают датчики давления;
• опрашивают концевые датчики;
• опрашивают импульсные датчики;
• опрашивают датчики двигателя.
16. Способ управления буровыми работами по п. 15, отличающийся тем, что датчики двигателя являются датчиками давления масла и/или датчиками оборотов.
17. Способ управления буровыми работами по п. 9, отличающийся тем, что при инициировании команды на бурение при помощи устройства сопряжения предварительно:
• опрашивают датчики давления;
• опрашивают концевые датчики;
• опрашивают импульсные датчики;
• опрашивают датчики двигателя.
| СПОСОБ И СИСТЕМА ДЛЯ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ БУРЕНИЕМ СКВАЖИНЫ | 2019 |
|
RU2697988C1 |
| ЕДИНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ БУРОВЫХ УСТАНОВОК | 2016 |
|
RU2713072C2 |
| СИСТЕМА МОНИТОРИНГА ТЕХНОЛОГИЧЕСКИХ ПАРАМЕТРОВ ПРОЦЕССА БУРЕНИЯ НА БАЗЕ САМОХОДНОЙ БУРОВОЙ УСТАНОВКИ | 2020 |
|
RU2745308C1 |
| US 9593567 B2, 14.03.2017 | |||
| Способ измерения параметров паза на наружной сферической поверхности детали | 2022 |
|
RU2785969C1 |
| EP 3143244 B1, 26.02.2020. | |||

