Изобретение относится к способу посадки группы беспилотных летательных аппаратов (БЛА) на как минимум одну посадочную платформу (ПП). Оно может быть использовано при модернизации существующих систем посадки роевых структур БЛА на ПП, создании перспективных транзитно-оконечных станций обслуживания БЛА при высокой интенсивности их поступления на посадку для обслуживания одной или несколькими платформами и сетевого взаимодействия множества подобных станций.
Из уровня техники известен способ управления большим количеством коммерческих БЛА в контролируемом воздушном пространстве вокруг аэропорта по патенту «Альтернативные средства управления большим количеством коммерческих беспилотных летательных аппаратов над аэропортами и населенными пунктами» (US US9754497B1 Charles R. Smith Northrop Grumman Systems Corporation, Priority 2017-01-27, Filed 2017-01-27, Granted 2017-09-05, Published 2017-09-05). Изобретение описывает способ обеспечения безопасного полета большого числа коммерческих БЛА в контролируемом системой управления воздушным движением пространстве вокруг аэропорта. Способ включает обеспечение исходящего коридора от объекта перевозчика через контролируемое системой управления воздушным движением пространство аэропорта, который предназначен для перелета роя БЛА и запрещает нахождение в нем какого-либо другого летательного аппарата, при этом разрешение БЛА, чтобы покинуть исходящий коридор от системы управления воздушным движением аэропорта не требуется. Способ также включает обеспечение входящего коридора через пространство, контролируемое системой управления воздушным движением, к объекту перевозчика, который не позволяет какому-либо другому воздушному объекту находиться в нем, и позволяет БЛА возвращаться на объект перевозчика через пространство, контролируемое системой управления воздушным движением, пролетая через входящий коридор без необходимости управления воздушным движением. Изобретение предлагает использовать коммерческие БЛА для доставки посылок от объекта авиаперевозчика до конечного пункта назначения посылок или другого объекта авиаперевозчика, в зависимости от расстояния, размера БЛА и других факторов, вместо того чтобы требовать, чтобы посылки вывозились с территории аэропорта на грузовике или другом транспортном средстве. В одном варианте осуществления большой рой БЛА формируется как группа на земле в зоне собрания вдали от всего остального воздушного и наземного движения в аэропорту, поднимается в воздух как рой под контролем системы управления воздушным движением в зоне собрания и вылетает из этой зоны по исходящему коридору как группа. Как только группа БЛА выходят из контролируемого системой управления воздушным движением пространства, они рассеиваются как независимые БЛА к месту назначения, чтобы доставить свой груз. После доставки своего груза БЛА отправляется в заранее назначенную зону повторного сбора за пределами пространства, контролируемого системой управления воздушным движением, где он вместе с другими выполнившими задание БЛА объединяются в рой для дальнейшего следования в зону аэропорта. После полного формирования роя БЛА, он возвращается обратно в аэропорт через контролируемое системой управления воздушным движением пространство, приземляется в зоне сбора, чтобы быть готовым к перенастройке группы для других грузов. Использование системы управления воздушным движением в настоящем документе предназначено либо для наземного управления, либо для управления воздушным пространством в аэропорту. Представленный патент позволяет организовать специально выделенные коридоры в ограниченном пространстве - районе аэродрома для безопасного пролета БЛА, однако не решает задачу посадки роевых структур БЛА на как минимум одну ПП.
В качестве прототипа выбран способ посадки роя БЛА на подвижную платформу [Anam Tahir, Jari Bӧling, Mohammad-Hashem Haghbayan, Juha Plosila. Navigation System For Landing A Swarm Of Autonomous Drones On A Movable Surface. Communications of the ECMS, Volume 34, Issue 1, Proceedings, Mike Steglich, Christian Mueller, Gaby Neumann, Mathias Walther (Editors). ISBN: 978-3-937436-68-5/978-3-937436-69-2(CD)].
Прототип рассматривает задачу посадки роя из фиксированного количества (десяти) БЛА на подвижную с линейной скоростью и эффектом колебаний платформу. Сущность изобретения состоит в следующем. Рой из десяти БЛА имеет иерархическую структуру с назначенным лидером, имеющим наивысшую ступень иерархии. С ним связаны БЛА-последователи следующего уровня иерархии, которые в свою очередь имеют своих БЛА-последователей. Для учета подвижности платформы БЛА-лидер имеет обратную связь с подвижной платформой и корректирует свое положение. БЛА-последователи вслед за лидером корректируют свои положения в рое, при этом решают задачу предотвращения столкновения с учетом безопасных расстояний между соседними БЛА в группе, далее такая задача решается БЛА-последователями последующих уровней иерархии. Рой отвечает за отслеживание желаемых траекторий, а также за зависание в нужных положениях в течение заданных интервалов времени. Траектория лидера независима и определяет траекторию роевой структуры БЛА. Траектория каждого последователя определяется на основе ориентации и действий соответствующего лидера. С точки зрения движения, каждый последователь зависит от движения своего соответствующего лидера, используя стратегию безопасного расстояния. Каждый последователь отвечает за эффективное отслеживание траектории соответствующего лидера, сохраняя дистанцию между двумя соответствующими объектами. При решении задачи посадки роя опорные команды со станции ПП непрерывно передаются лидеру в качестве обратной связи, описывая явление отслеживания взаимного перемещения. Затем локальный блок управления лидера корректирует свое местоположение и генерирует сигнал для стабилизации его при приземлении. Этот процесс продолжается до тех пор, пока не будет достигнута желаемая цель – посадка БЛА на ПП. Так как в иерархической роевой структуре на основе изначального определения в ней цепочек БЛА типа лидер-последователь и их непрерывного взаимодействия осуществляется постоянная взаимная ориентация БЛА и соответствующая коррекция маршрутов, то выбор очередного БЛА для посадки не требуется, при этом каждый следующий БЛА на посадку после БЛА-лидера осуществляет по прямому и обратному каналам связи подобное взаимодействие с ПП.
Недостатками рассмотренного способа являются: посадка группы БЛА со случайной структурой на ПП указанным способом невозможна из-за отсутствия реализации соответствующего протокола доступа к ПП, в рассмотренном прототипе выбор очередного БЛА для посадки определяется самой иерархической структурой роя БЛА за счет цепочек лидер-последователь; отсутствует возможность посадки случайного потока БЛА с высокой интенсивностью из-за отсутствия зоны ожидания с безопасным воздушным движением; способ не позволяет организовать приоритетное обслуживание БЛА при посадке; отсутствует возможность влияния системы посадки на рой БЛА с целью повышения безопасности полета в зоне посадки.
В настоящее время неизвестны способы и устройства, в соответствии с которыми имеется возможность посадки группы БЛА со случайной структурой или стохастического потока БЛА высокой интенсивности на посадочную станцию с одной или несколькими ПП, когда интервалы между поступающими БЛА для посадки меньше времени посадки БЛА на как минимум одну ПП.
Целью изобретения является обеспечение посадки групп БЛА со случайной структурой на ПП, а также стохастических потоков БЛА с усредненным временным интервалом между поступлениями БЛА меньшим минимально необходимого временного интервала для посадки одиночного БЛА на ПП; построение зоны ожидания БЛА с учетом задачи безопасности воздушного движения в зоне посадки; приоритетное обслуживание БЛА посадочной станцией с как минимум одной ПП; учет количества БЛА и интенсивности их поступления станцией посадки для повышения безопасности воздушного движения в зоне посадки БЛА.
Поставленная цель способа посадки группы БЛА со случайной структурой на ПП достигается созданием системы массового обслуживания посадки группы БЛА на как минимум одну ПП, в которую входят: пространственно-временная зона ожидания (ПВЗО) множества БЛА, требующих посадку на как минимум одну ПП, выполняющая функции накопительного устройства системы массового обслуживания системы посадки группы БЛА и обеспечивающая входные потоки БЛА множеством непересекающихся маршрутов, а также осуществляющая с помощью протокола множественного доступа к линии посадки регуляризацию суммарного входного потока БЛА, т.е. преобразование стохастического входного потока БЛА в регулярный поток для выхода на посадку; буферная зона посадки (БЗП), обеспечивающая выравнивание скорости БЛА при выходе из ПВЗО и прибытия в точку начала линии посадки на ПП, а также позволяющая регулировать коэффициент использования как минимум одной ПП; как минимум одна ПП, характеризуемая временем посадки одиночного БЛА, которая является обслуживающим устройством системы массового обслуживания посадки группы БЛА. При этом способ посадки группы БЛА со случайной структурой на основе данных о статистике обслуживания станцией посадки, информации о входном потоке БЛА, данных от соседних транзитно-оконечных станций посадки БЛА, технических характеристик БЛА и данных от метеостанции предусматривает формирование системой посадки структуры и размера ПВЗО, позволяющей обеспечить безопасное нахождение определенного количества БЛА в ПВЗО в режиме полета, формировать маршруты полета БЛА в ПВЗО, которые характеризуются частотой прохождения БЛА пространственных точек ПВЗО для выхода из зоны ожидания в БЗП и дальнейшей посадки, что определяет приоритет обслуживания БЛА. Выбор одного БЛА из множества претендентов для выхода из ПВЗО, с целью дальнейшей посадки на ПП, решается на основе протокола множественного доступа к линии посадки и алгоритмом анализа безопасности воздушного движения в зоне посадки. Преобразование стохастического входного потока БЛА в регулярный выходной поток БЛА на посадку в условиях высокой загрузки системы посадки осуществляется равномерным распределением входящих БЛА в ПВЗО на множестве непересекающихся и упорядоченных в пространстве замкнутых маршрутов, обеспечивающих периодический с разной частотой пролет БЛА точек выхода для посадки, при этом в каждом таком маршруте организуется упорядоченное движение входящих в ПВЗО БЛА через безопасный интервал времени, что соответствует временному уплотнению БЛА в заданном маршруте. В качестве варианта пространственной структуры ПВЗО предлагается двумерная кольцевая структура – тороидальная самоподобная структура, представляющая собой пространственную кольцевую структуру, основу которой составляет кольцевая структура, образованная правильным многоугольником (далее – элементарная кольцевая структура), который представляет кольцевую структуру малого радиуса двумерной кольцевой структуры (при бесконечном множестве точек элементарная кольцевая структура соответствует окружности, которая вращается вокруг оси, лежащей в плоскости этой окружности и не пересекающей её), количество его вершин определяет число секторов, равномерно распределенных по окружности большого радиуса двумерной кольцевой структуры. Множество точек (вершин) всех элементарных кольцевых структур формируют координатное пространство для движения в нем БЛА. Увеличение количества вершин в элементарной кольцевой структуре приводит к возрастанию множества маршрутов с разными приоритетами, числа БЛА пространственно распределяемых в структуре, а увеличение радиусов вращения двумерной кольцевой структуры, а именно малого - радиуса элементарной кольцевой структуры и большого - радиуса, соответствующего удалению центров элементарных кольцевых структур от оси их вращения, повышает безопасность воздушного движения БЛА за счет увеличения минимально допустимого расстояния между БЛА в ПВЗО.
Технический результат достигается тем, что информационно-вычислительными средствами системы посадки посадочной станции анализируются сведения о статистике поступления БЛА на посадку в заданном временном интервале, интенсивность поступления БЛА, сведения трафика БЛА от соседних транзитно-оконечных посадочных станций, метеоусловия и технические характеристики обслуживаемых БЛА, в результате чего системой посадки формируется структура ПВЗО, производится идентификация запрашивающих посадку объектов и, при положительном решении на обслуживание, по каналу связи выдаются каждому БЛА входящей группы, или одиночному БЛА в стохастическом потоке, разрешение на посадку, время и пространственные координаты для входа в ПВЗО, маршрут, скорость движения БЛА в ПВЗО. В процессе движения БЛА в ПВЗО в дискретный интервал времени несколько БЛА, приближаясь к точкам выхода из ПВЗО, совместно с системой посадки реализуют протокол доступа к линии посадки, в результате чего как минимум один БЛА выходит из ПВЗО для посадки, остальные продолжают движение в ПВЗО по замкнутым маршрутам. Выходящему из ПВЗО БЛА задаются маршрут движения в БЗП и координаты линии посадки при использовании технических средств посадки, в том числе с использованием технического зрения, осуществляется посадка БЛА на ПП.
Отличие изобретения от прототипа состоит в том, что на основе предложенного способа создается система массового обслуживания посадки групп БЛА со случайными структурами, в которой на основе изменяемой структуры ПВЗО и множества непересекающихся в ней маршрутов осуществляется буферизация различного количества БЛА, регуляризация входных потоков БЛА и обеспечение условий приоритетного обслуживания БЛА при посадке. В результате имеется возможность осуществлять посадку не только групп БЛА с различными структурами, но и стохастического потока БЛА с интенсивностью поступления БЛА выше скорости посадки одиночного БЛА на посадочную платформу в определенном интервале времени. Изменение структуры ПВЗО зависит от анализа статистики поступления БЛА на посадку, характеристик трафика БЛА с учетом сведений информационного взаимодействия с другими транзитно-оконечными станциями посадки, метеоусловий и технических характеристик БЛА. Увеличение радиусов структурных элементов двумерной кольцевой структуры ПВЗО, при сохранении количества вершин элементарной кольцевой структуры, позволяет повысить безопасность воздушного движения БЛА в зоне посадки.
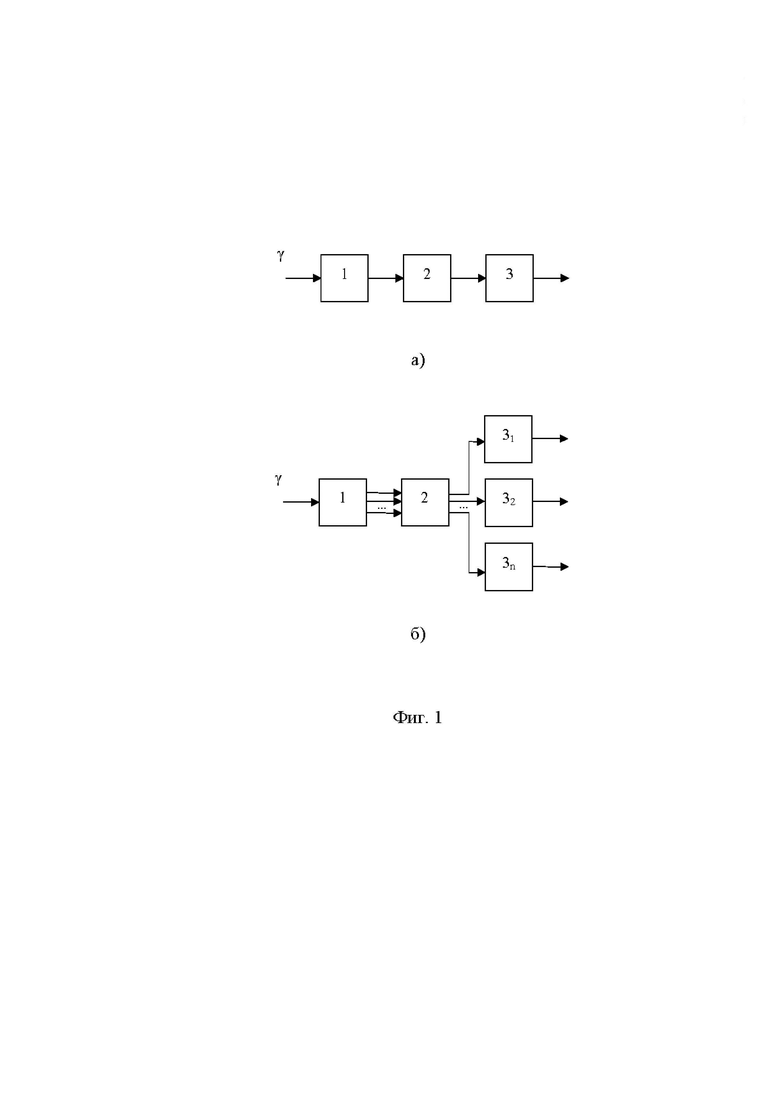
На фиг. 1а) представлена модель системы посадки роевых групп БЛА на ПП в виде системы массового обслуживания, состоящей из основных блоков:
1 - ПВЗО;
2 - БЗП;
3 - ПП.
На фиг. 1б) приведена модель системы массового обслуживания групп БЛА с несколькими ПП: ПП1, …, ППn.
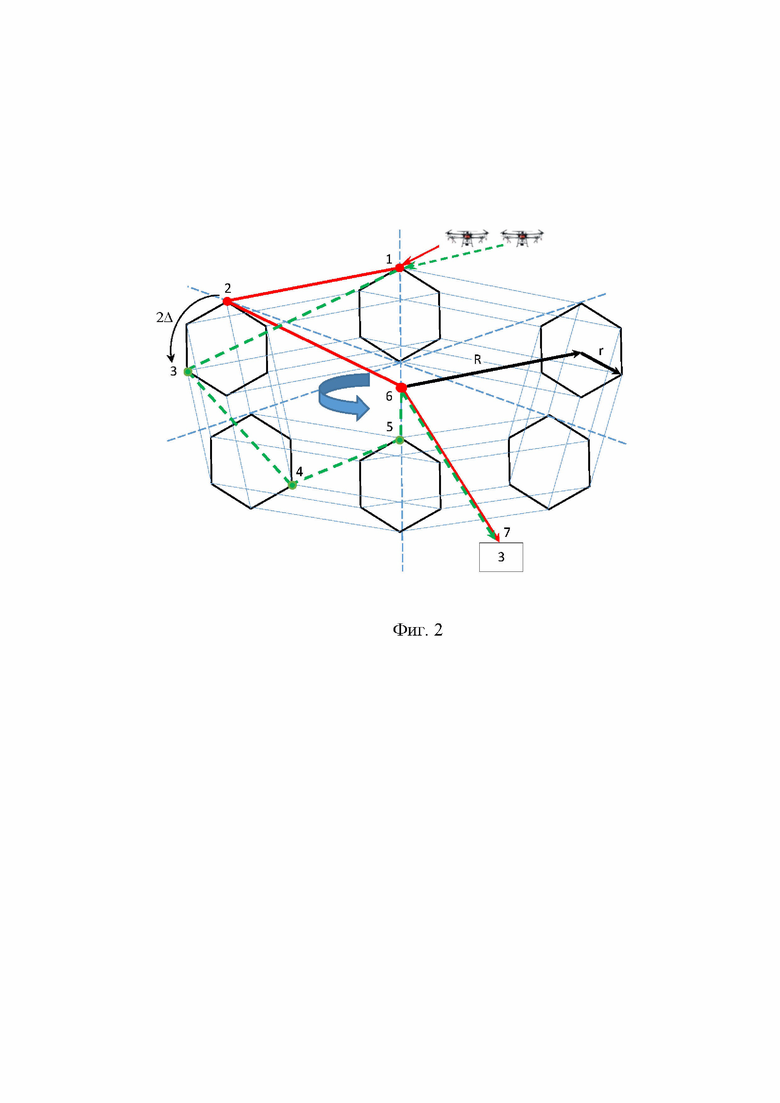
На фиг. 2 приведена структура ПВЗО с двумя маршрутами БЛА.
Линия 1-2 соответствует полету БЛА по маршруту с наивысшим приоритетом, соответствующему фазовому сдвигу «0»; линия 1-3-4-5 соответствует маршруту с пониженным приоритетом на два уровня и соответствующему фазовому сдвигу «2Δ»; линии 2-6 и 5-6 соответствуют движению БЛА в БЗП 2, а спаренная линия 6-7 – линия посадки БЛА на ПП 3.
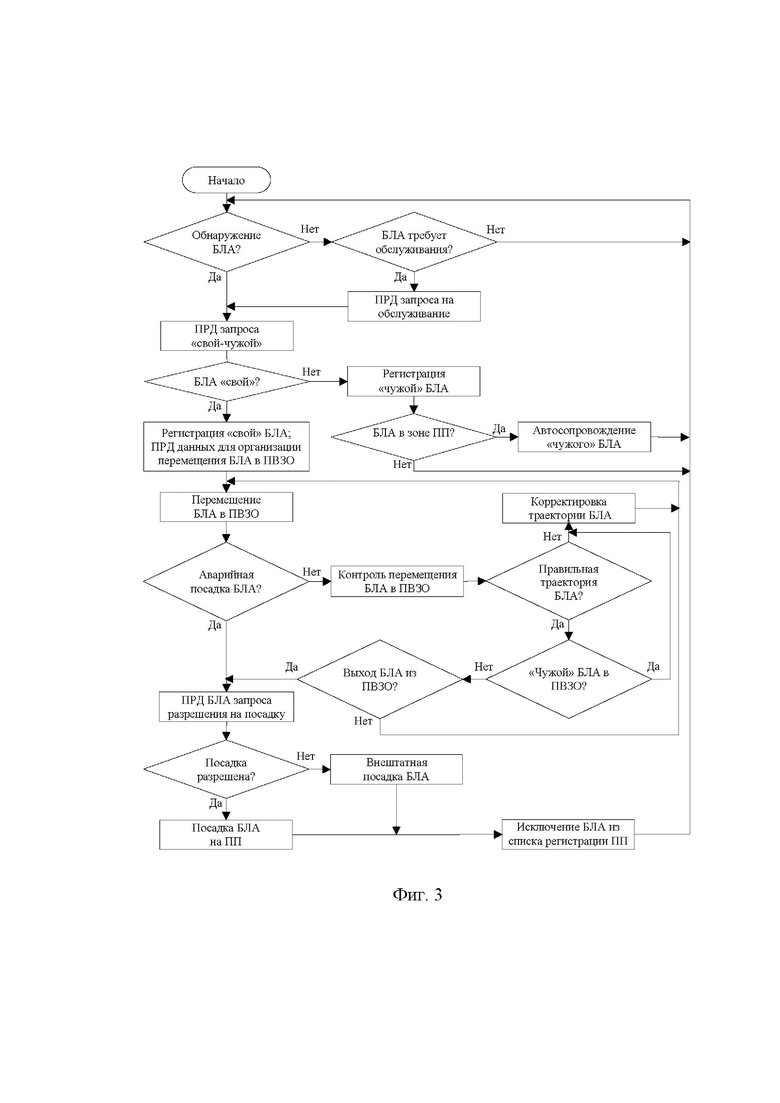
На фиг. 3 представлен алгоритм взаимодействия системы посадки посадочной станции с БЛА.
Система массового обслуживания посадки группы БЛА со случайной структурой (фиг.1а), состоит из последовательно соединенных ПВЗО 1, БЗП 2 и ПП 3, на вход которой поступает рой БЛА со случайной структурой, либо стохастический поток БЛА с интенсивностью γ [БЛА/ед. времени]. При наличии нескольких, в общем случае n, ПП 3, БЛА с выхода ПВЗО 1, как вариант с разных пространственных точек, поступают в БЗП и далее следуют параллельно в точки начала линий посадки соответствующих ПП 3 (фиг. 1б). ПВЗО 1 выполняет функции накопления ожидающих посадку БЛА, регуляризации входящего потока БЛА и обеспечения безопасности воздушного движения БЛА в ней, БЗП 2 осуществляет выравнивание скоростей движения БЛА при выходе БЛА из ПВЗО 1 и его входе в точку линии посадки ПП 3, при высокой скорости обслуживания ПП 3 обеспечивает эффективный коэффициент использования, как вариант, путем загрузки БЗП 2 несколькими БЛА. Структурно ПВЗО (фиг. 2) представляет собой ограниченное пространство нахождения БЛА, в котором имеет место пространственная фигура, координаты узловых точек которой определяют точки прохождения множества независимых маршрутов БЛА в процессе их движения с условием выполнения требований безопасности воздушного движения.
Вариантом ПВЗО, обладающей большим числом непересекающихся замкнутых маршрутов является двумерная кольцевая структура – тороидальная структура, обладающая самоподобием, т.е. в ней одинаковые элементарные кольцевые структуры малого радиуса, представляющие собой, для примера (фиг. 2), правильный шестиугольник, определяют пространственную шестиугольную кольцевую структуру правильной формы большого радиуса, вершины которой соответствуют элементарным кольцевым структурам малого радиуса. В результате, в тороидальной структуре формируются сектора, середины которых соответствуют элементарным кольцевым структурам (фиг. 2), через которые осуществляется вход и выход БЛА из ПВЗО 1. В зависимости от анализа трафика БЛА, характеристик БЛА и метеоусловий система посадки может изменять размерность элементарной кольцевой структуры, в результате чего количество и плотность секторов в структуре меняется. Так, например, при фиксированных значениях радиусов r и R (фиг. 2), для элементарной кольцевой структуры с 12-ю узлами структура ПВЗО будет иметь 12 секторов, что позволяет формировать большее количество независимых маршрутов в структуре с одновременным увеличением плотности БЛА. Уменьшение расстояний между БЛА в ПВЗО предполагает учет задачи безопасного воздушного движения в зоне посадки. При фиксированном значении максимально допустимого количества БЛА в ПВЗО увеличение r и R приводит к расширению пространства с одновременным повышением безопасности воздушного движения. Вершины пространственной тороидальной структуры формируют координатное пространство маршрутов БЛА. Направление полетов БЛА в ПВЗО выбирается единым, например, против часовой стрелки (см. фиг. 2). Таким образом, пространственный фактор, характеризующий ресурс ПВЗО, определяется ее структурой и замкнутыми независимыми маршрутами в ней, а временной фактор – допустимыми временными интервалами между двумя следующими друг за другом БЛА в одном маршруте. Точки входа БЛА в ПВЗО и выхода БЛА из нее определяются особенностями взаимного расположения ПП и ПВЗО и метеоусловиями. На фиг. 2 выбраны верхние точки структуры. Маршрут для движения БЛА в ПВЗО определяется точкой входа в пространственную структуру и фиксированным фазовым сдвигом в элементарной кольцевой структуре. Двигаясь по маршруту в тороидальной структуре против часовой стрелки, БЛА в каждом секторе имеет целевую координату (одна из вершин элементарной кольцевой структуры следующего сектора) для изменения направления движения. Она получается путем добавления определенного фазового сдвига в маршруте (фиг. 2, маршрут с фазовым сдвигом «0» соответствует пути 1-2, маршрут с фазовым сдвигом «2Δ» - пути 1-3-4-5, при этом в каждом последующем секторе осуществляется одинаковое смещение целевой координаты против часовой стрелки на две вершины, т.е. на 2Δ). При фиксированном значении малого радиуса величина Δ, равная Δ=360/n, зависит от количества вершин n в элементарной кольцевой структуре, влияет, также как и геометрические параметры тороидальной структуры, на безопасность воздушного движения и должна быть больше минимально допустимого взаимного расположения соседних БЛА. В элементарных кольцевых структурах целевые координаты для разных маршрутов различны и отличаются фазовыми сдвигами в плоскости элементарной кольцевой структуры: Δ, 2Δ, 3Δ, … n/2Δ. Так как период обращения в двумерной кольцевой структуре равен 4π (за исключением маршрута с нулевым фазовым сдвигом, где период равен 2π, определяется движением БЛА только в одной плоскости и соответствует движению БЛА по кольцу большого радиуса), при движении в двумерной структуре, например, против часовой стрелки, БЛА перемещаются от сектора к сектору (по кругу) делая при этом смещение на свой фазовый сдвиг в элементарной кольцевой структуре в каждом секторе, то за период обращения по кольцу большого радиуса, в зависимости от маршрута, БЛА делает разное количество обращений по кольцевой структуре малого радиуса. Это дает возможность БЛА с разной частотой выходить в координатные точки, с которых определяется выход на посадку. Приоритетность обслуживания при посадке определяется маршрутом, который при соответствующем значении фазового сдвига имеет наибольшую частоту прохождения через точку в тороидальной структуре, которая в свою очередь позволяет осуществлять выход на посадку из ПВЗО. Используя упорядочение в элементарной кольцевой структуре, т.е. осуществив привязку каждой координаты к некоторому уровню (степени) принадлежности к заданным функциональным подмножествам (решениям), можно осуществить не только корректное управление БЛА с использованием нечетких (мягких) подмножеств при доступе к линии посадки, но и реализовать варианты аварийной посадки. Вариантом простой аварийной посадки является самостоятельное приземление БЛА в секторе, например, при прохождении нижней точки элементарной кольцевой структуры. Тороидальная структура ПВЗО может использоваться одновременно для взлета БЛА при условии соблюдения направленности движения БЛА в структуре и соответствующего алгоритмического разделения пространственно-временного ресурса зоны ожидания для взлета и посадки. Алгоритм взаимодействия системы посадки посадочной станции с БЛА (фиг. 3) предусматривает наличие технических средств контроля в целях недопущения несанкционированного доступа к ПП и обеспечения безопасности воздушного движения в ПВЗО.
Доказательством технической реализуемости способа является наличие необходимых технических и вычислительных ресурсов системы посадки роя БЛА, средств технического зрения, систем контроля с видео- и ИК каналами, беспроводных систем связи в зоне посадки, обеспечивающих двустороннюю цифровую связь между центральным блоком системы посадки и множеством БЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| Информационно-измерительная и управляющая система посадки группы беспилотных летательных аппаратов на посадочную платформу | 2022 |
|
RU2784221C1 |
| Способ организации воздушного движения группы беспилотных летательных аппаратов в зоне посадки | 2021 |
|
RU2772594C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОСАДКОЙ МАЛОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2735196C1 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| Воздухоплавательный роботизированный аппарат для мониторинга и внесения средств защиты растений, удобрений в точном земледелии | 2019 |
|
RU2703198C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОСАДОЧНОЙ ТРАЕКТОРИИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ОСНОВАНИИ ДАННЫХ О ЗАРЕГИСТРИРОВАННЫХ ТРАЕКТОРИЯХ С ПРИМЕНЕНИЕМ В КАЧЕСТВЕ МЕРЫ СХОДСТВА ТРАЕКТОРИЙ МЕРЫ КОСИНУСА (ВАРИАНТЫ) | 2015 |
|
RU2616107C9 |
| ВЫСОКОЭФФЕКТИВНЫЙ СПОСОБ ПРИМЕНЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ДЛЯ ПОЖАРОТУШЕНИЯ | 2019 |
|
RU2766035C1 |
| Способ и устройство для управления движением на аэродроме | 2015 |
|
RU2634502C2 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1995 |
|
RU2133210C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОСАДОЧНЫХ ТРАЕКТОРИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ, СООТВЕТСТВУЮЩИХ ОДНОЙ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЕ | 2015 |
|
RU2616106C2 |
Изобретение относится к способу посадки группы беспилотных летательных аппаратов (БЛА) на посадочную платформу. Для посадки БЛА осуществляют информационный обмен по прямому и обратному каналам связи требующего посадки БЛА с посадочной платформой и последующей коррекции его движения при посадке, при этом для остальных БЛА из группы определенным образом формируется зона ожидания и приоритет обслуживания. Обеспечивается повышение безопасности воздушного движения группы БЛА. 4 з.п. ф-лы, 3 ил.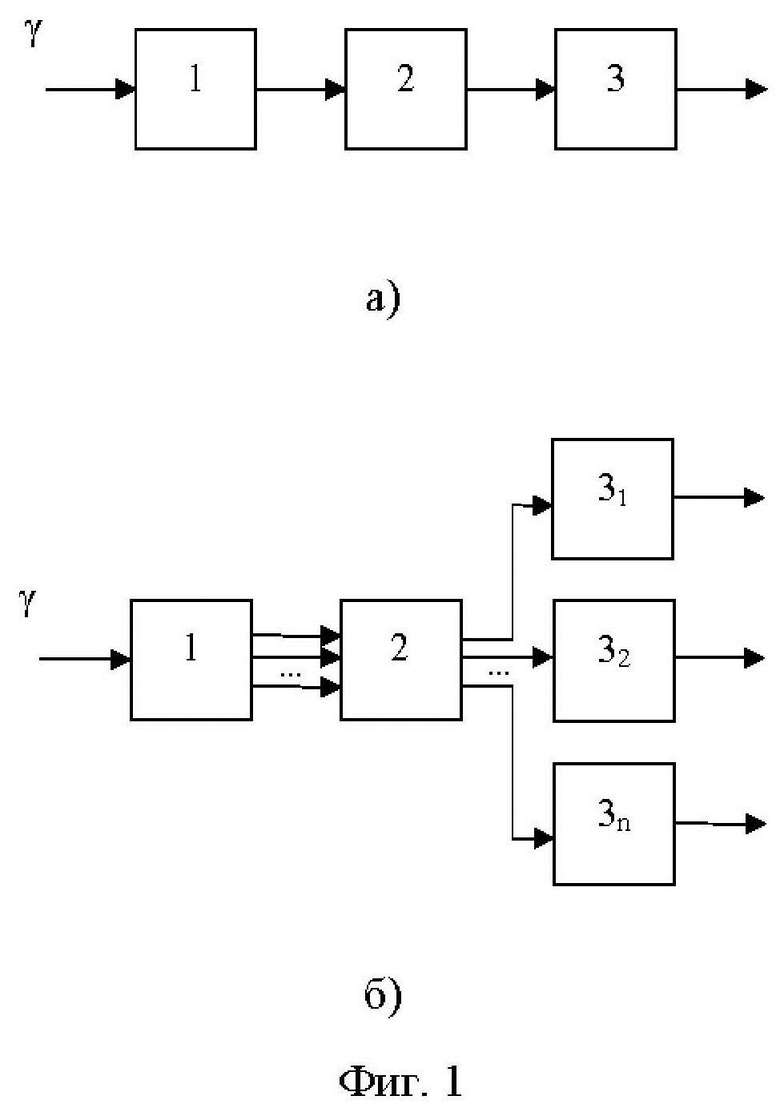
1. Способ посадки группы беспилотных летательных аппаратов (БЛА) на посадочную платформу, заключающийся в информационном обмене по прямому и обратному каналам связи требующего посадки БЛА с посадочной платформой и последующей коррекции его движения при посадке, отличающийся тем, что с целью безопасной посадки группы БЛА со случайной структурой и приоритетами в обслуживании, а также поступающего стохастического потока БЛА с высокой интенсивностью создается система массового обслуживания посадки группы БЛА как минимум с одной посадочной платформой, включающая пространственно-временную зону ожидания БЛА с перестраиваемой в дискретные моменты времени, но фиксированной на задаваемом временном интервале пространственной структурой, вершины которой соответствуют координатам маршрутов движения БЛА, в которой формируется множество непересекающихся в пространстве, определяющих приоритеты обслуживания БЛА при посадке, маршрутов движения БЛА.
2. Способ по п.1, отличающийся тем, что пространственно-временная зона ожидания БЛА имеет тороидальную самоподобную структуру, в которой количество вершин кольцевой структуры малого радиуса равно количеству соответствующих кольцевой структуре малого радиуса секторов кольцевой структуры большого радиуса, маршруты движения БЛА в пространственной кольцевой структуре задаются в одном из двух направлений, например, против часовой стрелки, при входе в зону ожидания каждому БЛА задаются координаты точки входа, соответствующие одной из вершин кольцевой структуры заданного системой посадки сектора малого радиуса, время входа в зону ожидания, маршрут движения в ней и скорость движение БЛА по маршруту.
3. Способ по п.2, отличающийся тем, что маршрут движения БЛА в пространственно-временной зоне ожидания задают координатами последовательности точек двумерной кольцевой структуры, учитывающих движение его по циклу в кольцевой структуре большого радиуса и перемещение БЛА с учетом фазового сдвига в кольцевой структуре малого радиуса пространственной структуры зоны ожидания.
4. Способ по пп.1 и 2, отличающийся тем, что пространственно-временная зона ожидания и параметры тороидальной пространственной структуры изменяются в дискретные моменты времени в зависимости от требований безопасности воздушного движения, трафика БЛА, метеоусловий и технических характеристик БЛА не меняя алгоритмы функционирования системы посадки группы БЛА.
5. Способ по п.1, отличающийся тем, что с целью выравнивания скорости БЛА при выходе из зоны ожидания и входе на линию посадки, а также для повышения коэффициента использования посадочной платформы при посадке группы БЛА применяется буферная зона посадки с маршрутами полетов БЛА, позволяющими распределять их более чем на одну посадочную платформу, а в условиях высокого быстродействия как минимум одной посадочной платформы формировать трафик БЛА при выходе из зоны ожидания для посадки по одному и более маршрутам движения в буферной зоне посадки в направлении посадочной платформы.
| БЕСПИЛОТНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ДИСТАНЦИОННОГО МОНИТОРИНГА И БЛОКИРОВАНИЯ ПОТЕНЦИАЛЬНО ОПАСНЫХ ОБЪЕКТОВ ВОЗДУШНЫМИ РОБОТАМИ, ОСНАЩЕННЫЙ ИНТЕГРИРОВАННОЙ СИСТЕМОЙ ПОДДЕРЖКИ ПРИНЯТИЯ РЕШЕНИЙ ПО ОБЕСПЕЧЕНИЮ ТРЕБУЕМОЙ ЭФФЕКТИВНОСТИ ИХ ПРИМЕНЕНИЯ | 2007 |
|
RU2353891C1 |
| КОМПЛЕКС УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2004 |
|
RU2270471C1 |
| НАЗЕМНЫЙ ПУНКТ УПРАВЛЕНИЯ РОБОТОТЕХНИЧЕСКИМИ КОМПЛЕКСАМИ | 2017 |
|
RU2661264C1 |
| US 20200027360 A1, 23.01.2020 | |||
| US 10332406 B2, 25.06.2019. | |||

