ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
1. Область изобретения
[0001] Настоящее изобретение относится к области преобразованных в цифровую форму отображений состояния машины и, более конкретно, контроля изменяющегося состояния с использованием отображения аналоговых величин или других физических состояний устройства, которые фиксируются в момент, когда происходит изменение.
2. Краткое описание предшествующего уровня техники
[0002] Благодаря повсеместному распространению глобальных цифровых сетей большая часть мира и используемые машины могут быть быстро и легко соединены с другими машинам и цифровыми системам управления в любой точке мира. В настоящее время стало возможным создавать цифровые контуры управления и использовать глобальные сети, чтобы машины могли передавать важную информацию другим машинам напрямую (так называемые М2М - приложения межмашинного обмена информацией), чтобы обеспечить возможность автоматического принятия решений без вмешательства человека. Однако, в отличие от сообщений от человека к человеку, которые могут быть в форме голоса или изображения, приложения для взаимодействия машин обычно требуют передачи цифровых данных. Одной из общих частей многих приложений для взаимодействия машин сегодня является простое преобразование аналоговых телеизмерений и сигналов от машины в цифровую форму, подходящую для передачи через Интернет. Примеры, без рассмотрения как ограничение, включают преобразование в цифровой формат электрических сигналов, которые поступают на аналоговые измерительные приборы движущейся машины, такой, как транспортное средство, лодка или самолет, или которые фиксируются измерительными приборами удаленно расположенной машины, такой, как нефтяная вышка или механизм переключения в распределительной станции, и отправку результирующих цифровых представлений упомянутых электрических сигналов в другое место через проводной или беспроводной Интернет для дальнейших действий или мониторинга другой машиной или человеком. Однако многие машины изначально имеют измерительные приборы и световые индикаторы, которые предназначены для того, чтобы их мог воспринимать человек, а для того, чтобы такие машины могли передавать цифровую версию показаний своих световых индикаторов или измерительных приборов, требуются значительные модификации машин и внешнее вмешательство в работу внутренних электрических схем прохождения сигналов в таких машинах. Затраты на выполнение аналого-цифрового преобразования или даже для копирования данных цифровых измерительных приборов в форму, передаваемую через Интернет, снижают расходы на межмашинную связь в приложениях, когда такая связь может быть полезна. Кроме того, для некоторых машин при отправке цифровой информации из своих систем управления или измерительных приборов возникают трудности, связанные с нормативным регулированием, безопасностью или гарантией. Например, высокое напряжение в распределительном устройстве или механизме управления двигателем должно быть полностью изолировано от цепей низкого напряжения, которые обычно выполняют преобразование в цифровую форму и передачу данных через Интернет; любые манипуляции, связанные с измерительными приборами или электропроводкой на воздушном судне являются нарушением требований сертификата летной годности воздушного судна; новую схему для преобразованных в цифровую форму данных аналоговых измерительных приборов или для использования сигналов, уже присутствующих в цифровом виде на транспортном средстве, нельзя добавить без потери гарантии на автомобиль.
[0003] Таким образом, требуется система для преобразования в цифровую форму данных измерительных приборов, световых индикаторов и других, ориентированных на восприятие человеком, измерительных устройств машины, данных о ее функционировании и ее текущих состояниях, не влияющая на работу машины и не требующая доработки машины или вмешательства в существующую электрическую проводку машины, сигнализацию, электрические или механические элементы или режимы работы, или добавления к самой машине какого-либо дополнительного оборудования для преобразования в цифровую форму.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] Настоящее изобретение предлагает систему для преобразования в цифровую форму показаний устройств, таких как указатели, световые индикаторы и другие ориентированные на восприятие человеком измерительные устройства машин и данных о функционировании и текущих состояниях. Система работает без необходимости перенастройки функционирования или электронных компонентов контролируемого устройства. Исключается возможность неблагоприятного вмешательства в работу машины, и отпадает необходимость в переделывании каких-либо компонентов машины или во вмешательстве в существующие проводные, сигнальные, электрические или механические элементы или в изменении режимов работы машины. Кроме того, система может быть реализована с использованием оригинальной конфигурации оборудования и не требует добавления к самой машине нового оборудования для преобразованных в цифровую форму.
[0005] Данным изобретением могут быть обеспечены указанные выше, а также и другие преимущества.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0006] Фиг. 1 является предпочтительным вариантом осуществления, изображающим в перспективном виде камеру и приборную панель, и показывающим схему предпочтительного варианта осуществления системы в соответствии с первым вариантом осуществления.
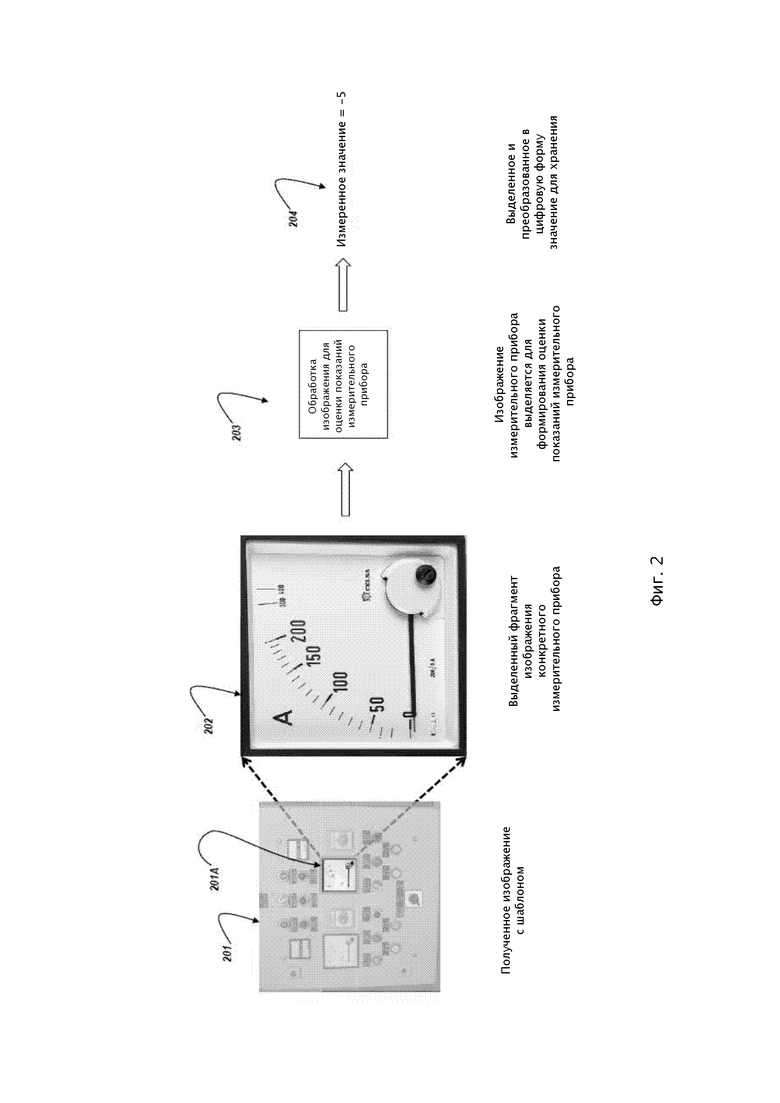
[0007] Фиг. 2 является видом спереди панели на Фиг. 1 с увеличенным фрагментом выбранного изображения, показывающим конкретный измерительный прибор на панели, и изображение процесса в соответствии с вариантом осуществления системы.
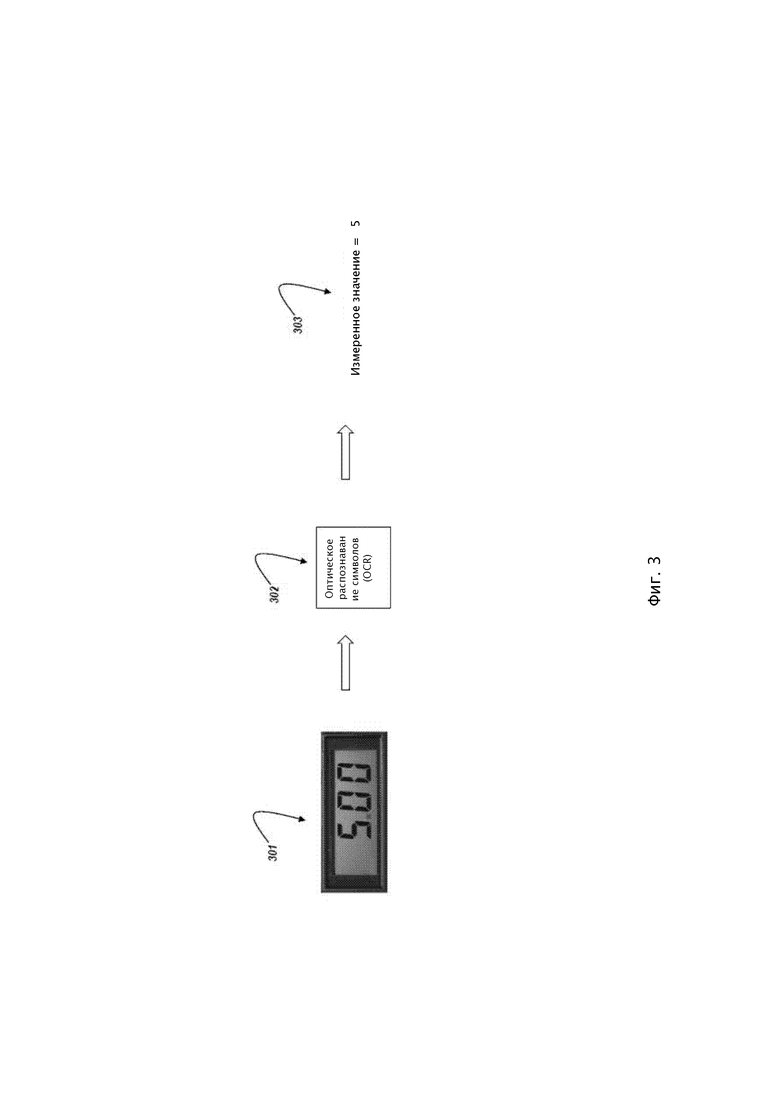
[0008] Фиг. 3 является видом спереди, показывающим цифровой измерительный прибор и изображение процесса в соответствии с вариантом осуществления системы.
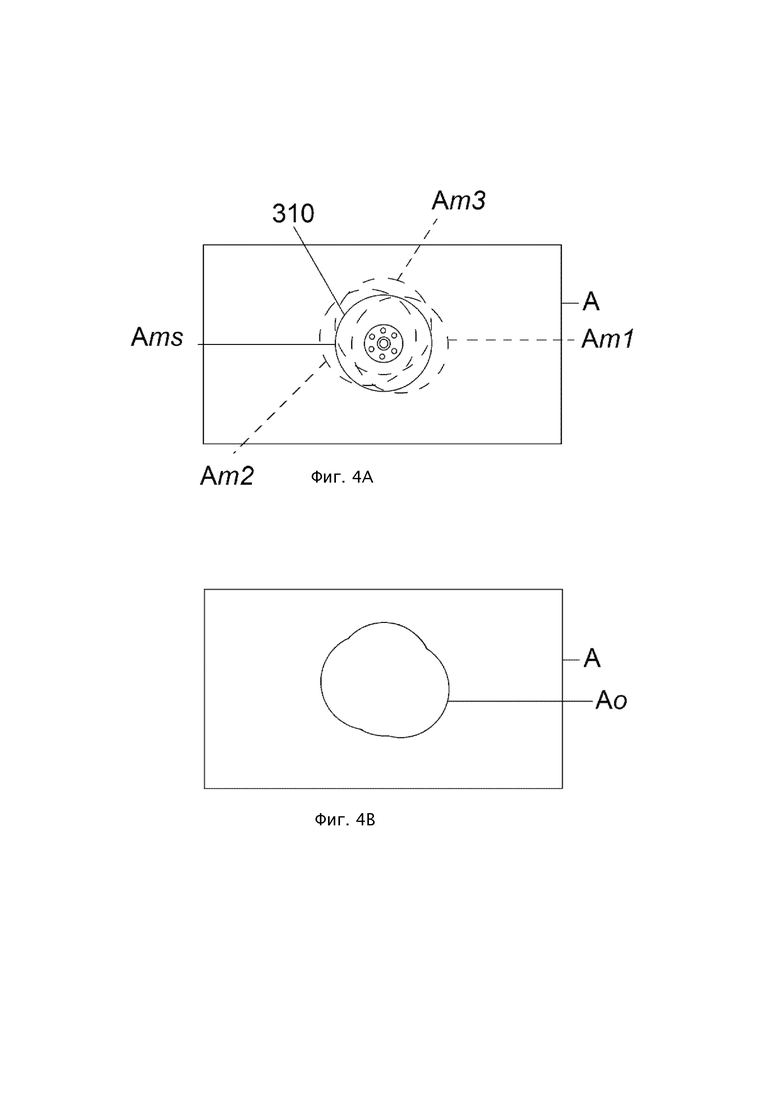
[0009] Фиг. 4А - пример изображения кадра, используемого для иллюстрации захвата изображения двигателя.
[0010] Фиг. 4 В - пример изображения кадра фигуры 4А, показывающий примерный диапазон отклонений области захвата изображения.
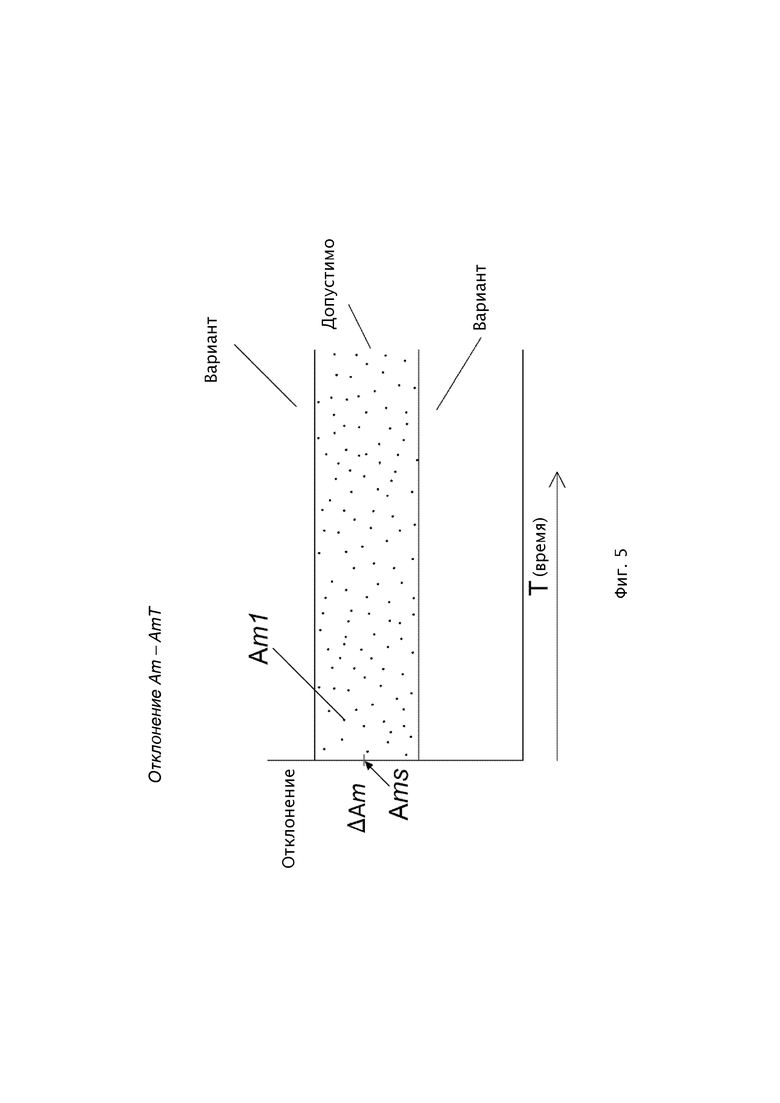
[0011] Фиг. 5 - диаграмма, представляющая изменение изображения работающего устройства, построенная по образам, захваченным в течение некоторого периода времени.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
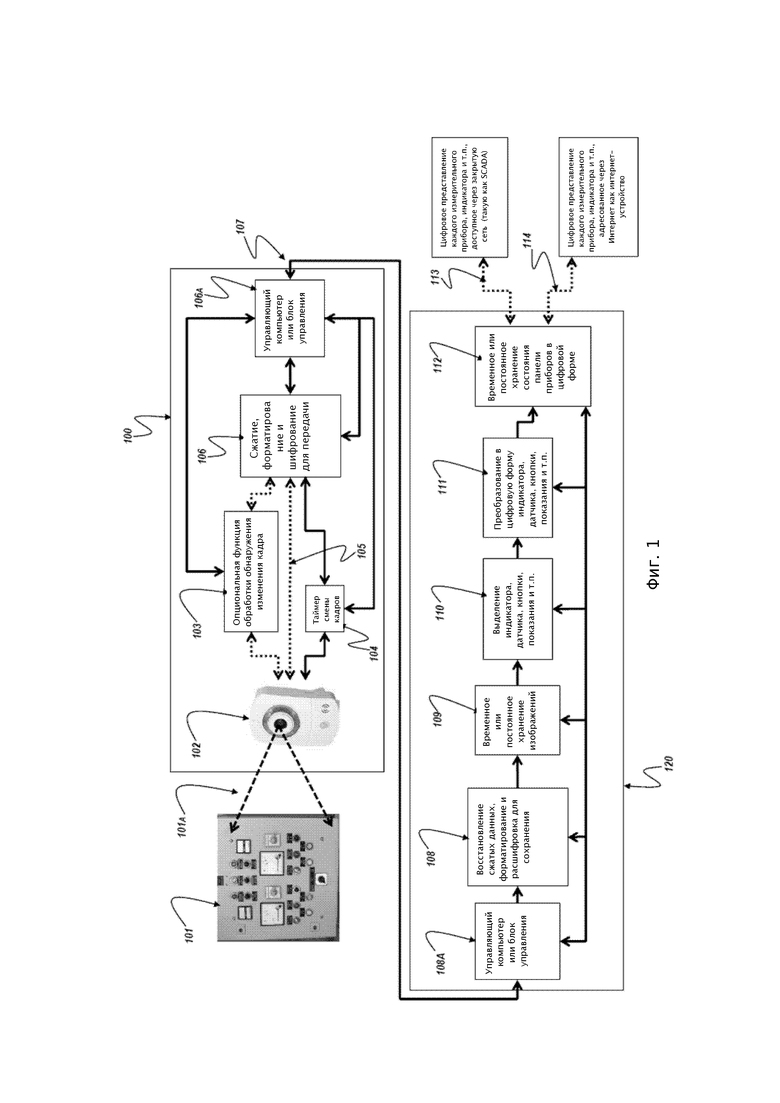
[0012] Предпочтительный вариант осуществления данного изобретения, называемого системой межмашинного обмена изображениями, показан на Фиг. 1. В предпочтительном варианте осуществления в ходе контроля отслеживается приборная панель 101 с измерительными приборами, индикаторами и переключателями, и любой или каждый приборный индикатор преобразовываются в цифровую форму с использованием данного изобретения. Следует отметить, что кроме естественного или целевого освещения, свет области обзора 101А, отраженный от панели (который, вообще говоря, может быть инфракрасным или другим в невидимой части спектра), является единственной связью между контролируемой приборной панелью и настоящим изобретением, а между настоящим изобретением и контролируемой машиной вообще нет никакого физического или электрического соединения. Камера 102 физически расположена вблизи контролируемой машины, так что область обзора 101А охватывает один или несколько указателей или световых индикаторов или панелей управления, которые необходимо контролировать. В некоторых альтернативных вариантах осуществления камера может содержать инфракрасную камеру (а в некоторых вариантах осуществления камера способна формировать изображения как при видимой, так и при инфракрасной подсветке). Средства инфракрасной подсветки могут быть предусмотрены (например, отдельно, как часть камеры или совместно с ней) для освещения панели приборов, так что камера сможет захватывать панели приборов в темных помещениях или ночью. Разрешение камеры 102 выбрано таким, чтобы оно было достаточным для обеспечения удовлетворительной детализации на уровне точечных элементов изображения, чтобы обеспечить необходимое разрешение, требуемое для полноценного преобразования в цифровую форму каждого измерительного прибора или каждого индикатора. Камера 102 получает изображения приборной панели. Частота кадров изображения может либо изменяться при помощи таймера 104 для смены кадров, которая устанавливается вручную или дистанционно через локальную систему управления, которая может также содержать в себе процессор 106А общего или специального назначения для выполнения программы общего назначения или специализированной программы, либо являться функцией 103 обработки, реализуемой аппаратными или программными средствами или их комбинацией, и которая предполагает захват кадров на панели приборов только тогда, когда происходит изменение на самой панели приборов, или же камера может снимать видеосигнал 105 непрерывно. Кадры или видеосигнал при необходимости сжимаются, форматируются и шифруются, 106, а затем передаются для автоматической отправки или сохранения по запросу блока управления или компьютера 106А. Следует понимать, что все функции 102, 103, 104, 105, 106 и 106А могут быть реализованы посредством аппаратных, программных или программно-аппаратных средств в одном процессоре, могут полностью находиться в камере 102, и все эти функции могут контролироваться управляющим компьютером 106А. Эти элементы составляют то, что называется удаленной системой 100.
[0013] Затем изображения передаются по сетевому соединению 107, которое может быть Интернетом или закрытой линией связи, и один или несколько сегментов которого могут быть соединены электрически, оптически или беспроводной линией связи посредством наземного или спутникового канала связи. Это сетевое соединение 107 также может служить для обеспечения команд и управляющих инструкций для блока 106А управления. Изображения, предоставляемые удаленной системой 100, поступают в отдельный управляющий компьютер или блок управления 108А и для выполнения последующих действий по восстановлению сжатых данных, форматирования и расшифровки 108. Полученные изображения затем могут быть сохранены постоянно, либо временно в памяти или в другом электронном запоминающем устройстве 109. Впоследствии используются алгоритмы выделения 110 и преобразования 111 в цифровую форму, которые, как дополнительно описано ниже, преобразуют каждое изображение в последовательность цифровых значений, связанных с любым или всеми индикаторами, измерительными приборами, указателями или переключателями в данном изображении приборной панели. Алгоритм выделения 110 и алгоритм преобразования 111 в цифровую форму могут быть заранее предопределены или могут выполняться по выбору для разных элементов приборной панели на основе запроса, и могут включать в себя алгоритмы оптического распознавания символов (OCR). Затем результаты могут быть при необходимости сохранены в запоминающем устройстве 112, к которому затем можно получить доступ либо через закрытую линию связи, такую как система диспетчерского управления и сбора данных SCADA, либо через сеть общего доступа, такую как Интернет. С помощью множества средств, хорошо известных специалистам в данной области, данные, содержащиеся в памяти 112, могут быть представлены в Интернете как индивидуально адресуемые или как дополнительно адресуемые элементы данных. Как показано, все функции 108а, 108, 109, 110, 111 и 112 могут содержаться в одной подсистеме аппаратного и программного обеспечения, 120, или же только в программном обеспечении, работающем на более крупной группе серверов (не показано).
[0014] Вышеописанным образом один или несколько индикаторов, приборных показаний, измерительных приборов и подобных им могут стать цифровыми значениями чисел с возможностью доступа к каждому из них по адресу или дополнительному адресу через Интернет, без какого-либо прямого подключения или вмешательства в работу указанных индикаторов в приборной панели 101.
[0015] Функция 103 обнаружения изменений может быть запрограммирована для обеспечения захвата кадра или видеосигнала, когда какой-либо внешний объект изменяет вид панели приборов или приборов, например, оператор-человек оказывает управляющие воздействия или предпринимает какие-либо другие действия. Благодаря этому настоящее изобретение обеспечивает дополнительную безопасность и информацию, которая не обязательно должна присутствовать в простом цифровом потоке телеизмерений, который был сформирован путем преобразования сигналов в цифровую форму в самой панели приборов. Кроме того, удаленная система 100 может быть запрограммирована на распознавание определенных условий тревоги, таких как конкретный световой индикатор или высокая температура, и инициировать связь с локальной системой самостоятельно.
[0016] Далее будут описаны алгоритмы выделения и алгоритм преобразования в цифровую форму со ссылкой на Фиг. 2 и Фиг. 3. В случае измерительного прибора аналогового типа на Фиг. 2, в локальной системе, когда происходит первый случай захвата изображения там, где присутствует много индикаторов, измерительных приборов или указателей, которые могут не нуждаться в преобразовании в цифровую форму, каждый подлежащий преобразованию в цифровую форму измерительный прибор выделяется из общего изображения 201 в виде фрагмента 202 изображения с использованием простого алгоритма эталонного шаблона или другого известного алгоритма выделения фрагмента изображения, которые предоставляются во многих распространенных готовых пакетах обработки изображений, таких как Matlab. Шаблон изображения 201А может быть создан автоматически или однократно вручную на этапе создания фрагмента изображения. После выделения фрагмента изображения конкретного измерительного прибора или индикатора, в зависимости от типа измерительного прибора, для определения текущих показаний измерительного прибора могут использоваться различные известные способы обработки и выделения изображений. Например, на этапе 203 для измерительного прибора можно использовать преобразование Хафа, чтобы автоматически определять угол отклонения индикатора от горизонтали и этот угол соотнести с показаниями измерительного прибора, указанными в таблице. Для обобщенного способа, эталонное изображение измерительного прибора при каждом возможном показании, различимом по представленному в виде точечных элементов изображения, может быть предварительно сохранено в локальной системе обработки, где каждое изображение связано с численным значением показания измерительного прибора, и сопоставлено на этапе 203 с фрагментом изображения, чтобы определить, какое из эталонных изображений наиболее близко соответствует принятому системой текущему фрагменту изображения. Существует множество других способов обработки изображений, как правило, хорошо известных специалистам в области обработки изображений, которые могут использоваться на этапе 203 без отступления от настоящего изобретения. По завершении этапа 203 значение 204 показания измерительного прибора или индикатора сохраняется в локальной системе в виде числового значения, в данном случае, минус пять.
[0017] Как показано на Фиг. 3, после создания фрагмента изображения, представленный цифровой панельный измерительный прибор, может быть легко преобразован из фрагмента изображения в численное значение 303 с помощью простой программы оптического распознавания символов 302, которая обычно доступна в стандартном программном обеспечении.
[0018] Система межмашинного обмена, согласно изобретению, также может добавлять дополнительные функции к обработке изображений, такие, как коррекция деформации перспективы в случае, когда камера установлена не вполне прямо по отношению к измерительному прибору или индикатору, или когда отображается большая панель, что не выходит за рамки настоящего изобретения. Библиотеки распространенных измерительных приборов могут поддерживаться для удобной ручной и/или автоматической начальной настройки.
[0019] Предлагаемое изобретение межмашинного обмена изображениями имеет преимущества, заключающиеся в возможности адаптации к широкому спектру измерительных преобразователей, измерительных приборов и индикаторов, включая те из них, которые трудно поддаются преобразованию в цифровую форму с помощью традиционных встроенных систем телеизмерений и аналого-цифровых электрических или механических средств. Кроме того, благодаря использованию камеры и системы изображений можно захватывать изображения и преобразовывать в цифровую форму показания многих измерительных приборов или индикаторов одновременно. Более того, система межмашинного обмена изображениями может предоставлять дополнительную информацию, которая обычно недоступна при традиционных телеизмерениях, например, когда сотрудник осуществлял корректирующие воздействия, осматривал машину, происходили другие подобные события в окружающей среде или случайные события, которые, в противном случае, не были бы зарегистрированы. Кроме того, камера может быть сфокусирована на двигателе, моторе, на наборе шкивов или ремней и может выполнять сравнение между кадрами, чтобы определить величину вибрации или зафиксировать крутящий момент двигателя или мотора, предоставляя информацию, которую, в противном случае, очень трудно выявлять дистанционно, даже с помощью высококачественных телеизмерений.
[0020] В соответствии с одним из вариантов осуществления, система может быть оснащена одной или несколькими камерами, которые направлены на один или более, чем один компонент двигателя или мотора, включая подключенные или связанные компоненты, такие как, например, ведущие или ведомые механизмы. Например, камера расположена так, что ее фокус направлен на двигатель или мотор, или рабочую часть механизма или его элемент. Камера отображает поле обзора и предоставляет кадр изображения, включающий область А изображения. Область А изображения проиллюстрирована на Фиг. 4А и Фиг. 4В, показывающих пример графического изображения кадра. В области А изображения на Фиг. 4А показано изображение двигателя 310, являющееся его захваченным изображением. Изображение двигателя 310 занимает часть области изображения А. Область изображения двигателя предпочтительно представляет координаты изображения, которые могут состоять из точечных элементов изображения. На изображенном сплошной линией двигателе 310 на Фиг. 4А двигатель 310 показан в статическом состоянии, представленном областью изображения двигателя Ams. Пунктирными линиями изображен двигатель 310 рабочих позициях, в которых двигатель 310 во время работы вибрирует. Захваченные изображения работающего двигателя 310 в области А кадра находятся в разных положениях в области А кадра и представлены позициями Am1, Am2, Am3 двигателя (для иллюстрации показаны три разные позиции). Хотя на фигурах показаны положения двигателя при вибрации в двухмерном изображении, в соответствии с альтернативными вариантами осуществления система может быть выполнена с учетом движения вперед (в плоскость страницы) или назад (от плоскости страницы) в дополнение или в качестве альтернативы к двумерному изображению.
[0021] Область изображения двигателя или работающий двигатель Ао могут быть связаны с координатами области изображения, в пределах которых изображение работающего двигателя 310 отображается и, более предпочтительно, работающего в допустимых диапазонах. В данном примере диапазон составляет допустимый уровень вибрации. Вибрация двигателя отображается расположением двигателя в пределах области А изображения. Область изображения двигателя может представлять собой несколько отдельных изображений Am1, Am2, Am3, … AmN двигателя, где каждое отдельное изображение соответствует набору координат изображения или точечных элементов изображения захвата кадра (в разное время), которые в этом примере могут быть представлены областью А изображения. Координаты изображения каждого изображения могут использоваться для определения рабочего параметра, который в этом примере представляет собой уровень вибрации и приемлемый уровень вибрации. На Фиг. 4B в данном примере область изображения или граница местоположения изображения работающего двигателя представлена как Ао. Область Ао изображения работающего двигателя может создаваться представленными положениями двигателя в кадре камеры, которые соответствуют приемлемым положениям в результате вибрационного перемещения или возмущений работающего двигателя в приемлемых рабочих условиях. Двигатель 310 может отображаться в нерабочем состоянии для обеспечения статического изображения Ams (см. Фиг. 4А), которое показывает уровень статического положения двигателя в кадре или области А. Изменения вибрации могут быть определены положением двигателя 310 в пределах области изображения А в заданный момент времени или в течение заданного временного интервала или серии кадров. Например, если граница Ао допустимой вибрации двигателя превышена, такое эксплуатационное событие может быть обнаружено и записано. Система может быть выполнена с программным обеспечением, содержащим инструкции для обнаружения эксплуатационных событий (таких как факт обнаружения) и формирование ответа, когда эксплуатационное событие было обнаружено. Например, некоторые ответы могут включать запись события в журнал, выдачу оповещения, уведомление конкретного человека или машины (компьютера) о выключении устройства (двигателя в рассматриваемом примере) или их комбинации.
[0022] Согласно некоторым вариантам осуществления, система может быть выполнена для обработки изображения AmT двигателя (где, например, изображение Am двигателя представляет собой изображение в конкретный момент времени Т) и сравнения точечных элементов изображения или координат местоположения изображения двигателя в поле изображения, чтобы определить, были ли нарушены параметры изображения двигателя. Нарушение может быть подтверждено определением того, что обработанное изображение показывает, что двигатель (например, его элемент) в кадре обнаружен в положении, находящимся за пределами обозначенной граничной области изображения двигателя, которая в этом примере является граничной областью Ао изображения двигателя. Например, когда Ао определяет набор координат, в пределах которых изображение двигателя является приемлемым для позиции или положения двигателя, а изображение двигателя нарушает границу координат, то может быть зафиксирован факт обнаружения. В соответствии с некоторыми вариантами осуществления, положения точечных элементов изображения и значения изображений двигателя могут сравниваться (например, с абсолютным значением или эталонным значением), чтобы определить, имело ли место нарушение приемлемых условий работы.
[0023] С другой стороны, вибрация двигателя может быть определена относительно отклонения от положения статического изображения Ams. Например, отдельные изображения Am1, Am2, Am3, … AmN двигателя во время работы двигателя могут предоставлять координаты изображения, которые отличаются от статических координат Ams изображения (хотя возможно, что некоторые из изображений текущего состояния Am1, … AmN могут соответствовать изображению статического состояния Ams и при работающем двигателе). Уровень отклонения может быть определен для области изображения рабочего двигателя, и камера, которая устанавливает изображение двигателя, может работать, как здесь показано и описано, с непрерывной визуализацией или визуализацией с заданной частотой кадров. На Фиг. 5 показана диаграмма отклонения изображения двигателя или разброс ΔAm относительно изображения статического положения (Ams) за время Т. Эта диаграмма графически показывает область диапазона допустимых отклонений и область значений за пределами области допустимого диапазона. Параметры диапазона или отклонений могут быть определены и заранее установлены на основе допустимых смещений или вибраций двигателя во время обычной работы или работы, которая считается допустимой. Может быть предусмотрен уровень отклонений для генерации сигнала запрета, если вибрации двигателя превышают допустимый или пороговый уровень, который представлен положениями двигателя в кадре изображения, а положения двигателя могут быть представлены точечными элементами изображения или координатами.
[0024] Согласно некоторым альтернативным вариантам осуществления, система может быть выполнена для отображения определенной части компонента, такого как двигатель. Например, может быть отображен шкив двигателя или его верхняя часть и, когда обнаруживается, что радиальная часть изображения имеет нарушение формы дуги (определяемое, например, по координатам кадра), которая ранее была определена для приемлемого рабочего диапазона, то может быть инициирован факт обнаружения. Кроме того, может быть сформировано предупреждение или другая операция.
[0025] Система может быть выполнена с возможностью генерации отклика на факт обнаружения (при котором вибрация двигателя обнаруживается и определяется как выходящая за пределы допустимых параметров), который может варьироваться от сохранения результата для последующего использования при техническом обслуживании до передачи команды на выключение двигателя или формироваться в виде любого другого ответа, который может быть направлен как предупреждение оператору или техническому специалисту (и позволить двигателю продолжать работу). Кроме того, изобразительные данные уровня вибрации могут быть обработаны и сохранены в виде исходных изображений или в виде обработанной информации. Уровни вибрации могут быть позднее использованы для того, чтобы восстановить перемещения двигателя, которые были зафиксированы. Кроме того, изобразительные данные вибрации, такие как, например, положение двигателя в кадре, или обработанные данные вибрации, полученные из изображений, могут иметь метку времени, чтобы обеспечить индикацию времени работы. Это может быть полезно для определения наличия либо отсутствия конкретной нагрузки, времени суток или операции, которая вызывает связанную с этим работу двигателя.
[0026] Хотя представленный пример связан с двигателем, могут использоваться и отображаться и другие рабочие компоненты, при этом информация на изображении обрабатывается так, чтобы определить, находится ли работа компонента в пределах приемлемого рабочего параметра или условия. Кроме того, может быть установлено множество камер для изображения соответствующего множества компонентов, и изображения множества компонентов могут быть определены и зафиксированы системой.
[0027] Кроме того, оборудованная камерой система может быть дополнена аудиоинформацией или звуковой дорожкой, в которую могут быть записаны звонки, аварийные сигналы или другие звуковые сигналы, которые в противном случае не контролируются системой изображений. Также звуки двигателей или моторов могут быть записаны так, что, если устройства начинают издавать необычные звуки, то могут быть предприняты соответствующие оперативные действия, и что в противном случае не могло бы быть выявлено.
[0028] Эти и другие преимущества могут быть получены с помощью настоящего изобретения. Хотя данное изобретение описано со ссылкой на конкретные варианты осуществления, настоящее описание является иллюстративным и не должно рассматриваться как ограничение объема данного изобретения. Хотя на кадре изображения А на Фиг. 4А показано множество изображений двигателя, такие изображения могут представлять изображения, захваченные в отдельных кадрах, и представлять отдельно снятые кадры изображения. Специалисты в данной области техники могут выполнить различные модификации и изменения, не выходящие за пределы сущности и объема изобретения, описанного здесь и определенного в прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля цифровых измерительных приборов | 1988 |
|
SU1569757A1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ МОДУЛЬ БОЛЬШОЙ ДАЛЬНОСТИ "ФОКУС-Д" | 2009 |
|
RU2427006C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ПРАВИЛЬНОСТИ ОТОБРАЖЕНИЯ ИНФОРМАЦИИ НА ЖИДКОКРИСТАЛЛИЧЕСКОМ ИНДИКАТОРЕ | 2007 |
|
RU2346331C1 |
| Оптико-электронная система преобразования данных изображения в элементы вектора состояния судна | 2023 |
|
RU2808873C1 |
| Информационная обзорно-панорамная система наблюдения | 2020 |
|
RU2757061C1 |
| Способ астроинерциальной ориентации и устройство для его осуществления | 2022 |
|
RU2836748C2 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ПРОГРАММИРУЕМЫМ МУЛЬТИМЕДИЙНЫМ КОНТРОЛЛЕРОМ | 2006 |
|
RU2483461C2 |
| СПОСОБ ОСУЩЕСТВЛЕНИЯ МОНИТОРИНГА УЛИЧНО-ДОРОЖНОЙ СЕТИ ПОСРЕДСТВОМ ПЕРЕДВИЖНОЙ ДОРОЖНОЙ ЛАБОРАТОРИИ И ФУНКЦИОНАЛЬНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2373324C1 |
| СИСТЕМА ИНДИКАЦИИ АВИАЦИОННОГО ОБЗОРНО-ПРИЦЕЛЬНОГО КОМПЛЕКСА | 1994 |
|
RU2112212C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2000 |
|
RU2197070C2 |
Изобретение относится к области вычислительной техники для контроля изменяющегося состояния с использованием отображения аналоговых величин или других физических состояний устройства, которые фиксируются в момент, когда происходит изменение. Технический результат заключается в исключении возможности неблагоприятного вмешательства в работу измерительных устройств. Для этого заявлена система для преобразования в цифровую форму данных измерительных устройств, ориентированных на восприятие человеком, содержащая первую подсистему, включающую камеру и средство связи для передачи изображений; вторую подсистему, имеющую управляющий компьютер или блок управления с программным обеспечением; при этом система содержит средства манипулирования данными измерительных устройств; захвата кадров изображений; обнаружения изменений для обнаружения изменений изображения; первая подсистема является удаленной подсистемой; а вторая подсистема принимает обработанные кадры изображения или видеосигнал и выполнена с возможностью управления обработкой кадров изображения или видеосигнала путем обработки кадров или видеосигнала; сохранения кадров изображения или видеосигнала; выделения части изображения и преобразования в цифровую форму выделенной части изображения. 42 з.п. ф-лы, 6 ил.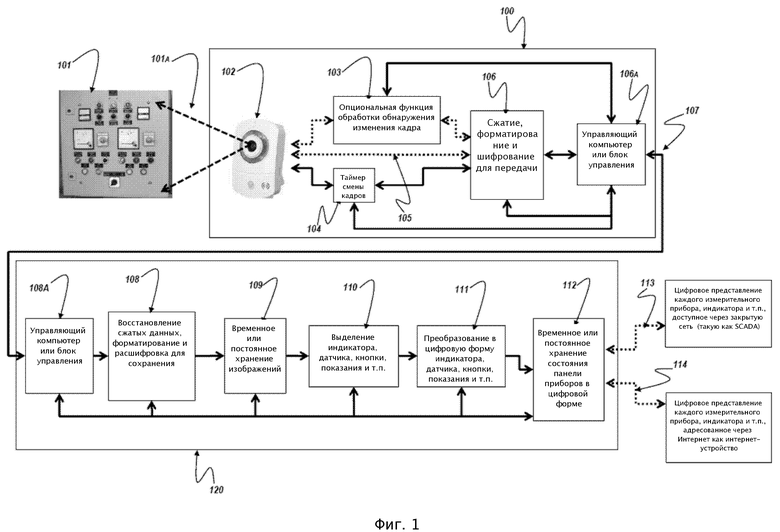
1. Система для преобразования в цифровую форму данных измерительных устройств, ориентированных на восприятие человеком, содержит первую подсистему, включающую камеру для получения данных измерительных устройств и средство связи для передачи изображений, полученных с помощью камеры; вторую подсистему, имеющую управляющий компьютер или блок управления с программным обеспечением, содержащим инструкции для хранения переданных изображений и для манипулирования изображениями; при этом система содержит средства
- манипулирования данными измерительных устройств путем выделения и преобразования изображений в цифровую форму,
- захвата кадров изображений тогда, когда происходит изменение полученного изображения,
- обнаружения изменений для обнаружения изменений изображения, захваченного тогда, когда изображение внутри кадра изображения или целевой части кадра изображения захватывает что-либо отличное от измерительного прибора и при этом внешний объект изменяет вид панели приборов или приборов, и средство предоставления дополнительной информации об осуществлении оператором корректирующего воздействия, осмотра машины или о выполнении других действий;
первая подсистема является удаленной подсистемой, выполненной с возможностью распознавания условий тревоги и инициирования связи с локальной системой; а вторая подсистема принимает обработанные кадры изображения или видеосигнал от первой подсистемы и выполнена с возможностью управления обработкой кадров изображения или видеосигнала путем
- обработки кадров или видеосигнала посредством одной или нескольких из операций восстановления сжатых данных, форматирования и расшифровки кадров или видеосигнала, полученного из первой подсистемы,
- сохранения кадров изображения или видеосигнала в памяти или запоминающем устройстве,
- выделения по меньшей мере одной части изображения и
- преобразования в цифровую форму выделенной части изображения для получения последовательности цифровых значений.
2. Система по п. 1, отличающаяся тем, что выделение и преобразование изображения в цифровую форму содержит выделение и преобразование в цифровую форму выбранной части изображения, при этом изображение содержит представление приборной панели, а выбранная часть изображения представляет место на панели, где расположен распознаваемый элемент.
3. Система по п. 2, отличающаяся тем, что распознаваемый элемент представляет собой датчик, измерительный прибор, переключатель, циферблат, световой индикатор или указатель.
4. Система по п. 1, отличающаяся тем, что камера и средство связи для передачи изображений выполнены совместно и включают один или несколько компонентов обработки со схемой для обработки изображений из камеры.
5. Система по п. 4, отличающаяся тем, что содержит таймер смены кадров, задающий частоту захвата изображения.
6. Система по п. 4, отличающаяся тем, что указанные один или несколько компонентов обработки содержат по меньшей мере один процессор, связанный с указанной схемой для выполнения программного обеспечения, содержащего инструкции по управлению захватом изображений.
7. Система по п. 1, отличающаяся тем, что первая подсистема содержит средство обнаружения смены кадров, которое обрабатывает данные об изображении, полученные с помощью камеры, идентифицирует возникновение изменения в контролируемом устройстве и активирует захват кадров изображения контролируемого устройства, когда обнаруживается изменение в контролируемом устройстве.
8. Система по п. 7, отличающаяся тем, что контролируемое устройство представляет собой приборную панель.
9. Система по п. 8, отличающаяся тем, что приборная панель содержит контролируемый компонент, а средство обнаружения смены кадров выполнено с возможностью идентификации возникновения изменения в контролируемом компоненте.
10. Система по п. 9, отличающаяся тем, что контролируемый компонент представляет собой измерительный прибор.
11. Система по п. 7, отличающаяся тем, что снабжена множеством камер, а контролируемое устройство содержит множество компонентов, которые должны соответственно контролироваться соответствующим множеством камер.
12. Система по п. 11, отличающаяся тем, что множество камер размещено в одном корпусе.
13. Система по п. 1, отличающаяся тем, что указанная первая подсистема содержит таймер смены кадров, задающий частоту захвата изображения.
14. Система по п. 1, отличающаяся тем, что указанная первая подсистема выполнена с возможностью захвата непрерывного видеосигнала камеры.
15. Система по п. 1, отличающаяся тем, что указанная первая подсистема выполнена с возможностью обработки кадра изображения или видеосигнала посредством сжатия, форматирования, шифрования или одной или несколькими из этих операций.
16. Система по п. 1, отличающаяся тем, что первая подсистема содержит управляющий компьютер или блок управления, который связан с камерой и принимает входные изображения, при этом первая подсистема выполнена с возможностью управления изображениями с камеры путем:
a) регулирования частоты захвата изображения с помощью таймера смены кадров;
b) обработки кадра изображения или видеосигнала одной или несколькими операциями сжатия, форматирования или шифрования кадра изображения или видеосигнала и
c) передачи обработанного кадра изображения или видеосигнала во вторую подсистему.
17. Система по п. 16, отличающаяся тем, что указанное контролируемое устройство является приборной панелью, имеющей множество распознаваемых элементов, которые содержат по меньшей мере один первый распознаваемый элемент и по меньшей мере один второй распознаваемый элемент; и в которой выделение по меньшей мере одной части изображения включает в себя выделение из изображения по меньшей мере первой части изображения, которая содержит изображение первого распознаваемого элемента, и выделение из изображения по меньшей мере второй части изображения, которое содержит изображение второго распознаваемого элемента; и в которой преобразование в цифровую форму выделенной части изображения для получения последовательности цифровых значений выполняется для каждого выделенного изображения для получения последовательности цифровых значений для первого распознаваемого элемента и второй последовательности цифровых значений для второго распознаваемого элемента.
18. Система по п. 16, отличающаяся тем, что управляющий компьютер или блок управления первой подсистемы содержат первый управляющий компьютер или блок управления, а управляющий компьютер или схема управления второй подсистемы содержит второй управляющий компьютер или блок управления.
19. Система по п. 1, отличающаяся тем, что первая подсистема выполнена как часть камеры.
20. Система по п. 1, отличающаяся тем, что первая подсистема размещена вблизи второй подсистемы.
21. Система по п. 1, отличающаяся тем, что указанное измерительное устройство является аналоговым устройством, а преобразования изображений в цифровую форму выполняют для получения цифровых значений из аналоговых значений.
22. Система по п. 1, отличающаяся тем, что камера является инфракрасной камерой.
23. Система по п. 22, отличающаяся тем, что содержит средство инфракрасной подсветки.
24. Система по п. 1, отличающаяся тем, что средством связи является линия связи.
25. Система по п. 24, отличающаяся тем, что средством связи является линия беспроводной сотовой связи.
26. Система по п. 24, отличающаяся тем, что средство связи содержит беспроводную сотовую часть.
27. Система по п. 24, отличающаяся тем, что средство связи содержит спутниковую беспроводную часть.
28. Система по п. 1, отличающаяся тем, что выполнена с программным обеспечением, содержащим инструкции для обработки изображений, полученных с камеры, и определения того, является ли изображение изображением приборной панели или части приборной панели или является чем-то иным, чем изображение приборной панели или части приборной панели.
29. Система по п. 1, отличающаяся тем, что содержит средство обнаружения изменения для обнаружения изменения, в котором изменение представляет собой попадание объекта или указателя в область обзора, которое вызывает отправку кадра или видеосигнала.
30. Система по п. 29, отличающаяся тем, что камера и средство обнаружения изменений используются дистанционно для контроля вибрации мотора или двигателя.
31. Система по п. 30, отличающаяся тем, что камера и средство обнаружения изменений используются для контроля нагрузки или крутящего момента на двигателе или моторе.
32. Система по п. 1, отличающаяся тем, что содержит средство обнаружения звука, содержащее датчик для обнаружения звукового события.
33. Система по п. 32, отличающаяся тем, что первая подсистема, размещена вблизи второй подсистемы и включает камеру и средство связи, при этом вторая подсистема содержит подсистему, имеющую управляющий компьютер или блок управления, причем обнаружение звукового события представляет собой установление того, был ли активирован звонок, аварийный сигнал или звуковое предупреждение вблизи от удаленной подсистемы.
34. Система по п. 1, отличающаяся тем, что измерительное устройство представляет собой двигатель, а камера захватывает изображения двигателя и изображения обрабатываются для того, чтобы определить состояние работы двигателя.
35. Система по п. 34, отличающаяся тем, что состоянием работы является вибрация двигателя.
36. Система по п. 35, отличающаяся тем, что каждое из захваченных изображений содержит кадр, имеющий область кадра, в которой указанный двигатель изображается в указанной области кадра, в которой указанный двигатель при работе захватывается в разных положениях в пределах области кадра, причем указанные положения двигателя оцениваются для выявления рабочего состояния двигателя.
37. Система по п. 36, отличающаяся тем, что указанная область кадра содержит координаты, определяющие местоположения в кадре, причем указанные изображения двигателя представлены координатами, а указанные координаты изображения двигателя характеризуют состояние вибрации двигателя.
38. Система по п. 36, отличающаяся тем, что приемлемое состояние вибрации определяется областью вибрации кадра изображения, представленного набором координат.
39. Система по п. 36, отличающаяся тем, что система формирует предупреждение тогда, когда вибрация двигателя, определяемая по изображениям с камеры, выходит за допустимые пределы состояния вибрации.
40. Система по п. 1, отличающаяся тем, что содержит локальную систему управления, которая управляет камерой с использованием частоты кадров, изменения в самой приборной панели или их комбинации.
41. Система по п. 1, отличающаяся тем, что средство связи является линией связи, а первая подсистема принимает команды и управляющие инструкции из линии связи.
42. Система по п. 8, отличающаяся тем, что приборная панель содержит распознаваемый элемент, причем для формирования фрагмента изображения распознаваемого элемента в системе используется фрагмент шаблона.
43. Система по п. 1, отличающаяся тем, что содержит библиотеку измерительных устройств, которая содержит параметры настройки для измерительных устройств, которые должны быть преобразованы в цифровую форму, причем измерительное устройство из библиотеки устройств может быть выбрано для применения настроек при управлении камерой и выполнении операций обработки изображений.
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| ZAINUL ABDIN JAFFERY et al | |||
| Architecture of Noninvasive Real Time Visual Monitoring System for Dial Type Measuring Instrument, опубл | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |

