Способ относится к области экспериментальной аэротермодинамики, в частности к лабораторным вакуумным аэродинамическим установкам кратковременного действия, обеспечивающим моделирование условий полета летательных аппаратов в верхних слоях атмосферы с большими числами Маха.
Известен способ измерения [1], в котором модель с калориметрическими датчиками теплового потока сначала нагревают, а затем нагретая модель с датчиками вставляется в поток с помощью устройства бокового перемещения. Регистрируется температура в потоке, из которой вычитается температура предварительного нагрева.
Данный метод применяется в установках, рабочее время которых нескольких минут, а поток из сопла стационарен. Способ невозможно применить на установке кратковременного действия с рабочим временем несколько миллисекунд. Также герметичный вакуумный блок аэродинамической установке кратковременного действия и не содержит устройства бокового перемещения. Кроме того, процесс механического встраивания модели в гиперзвуковой поток на Махах М=7-9 влияет на физическую кинетику в трубах кратковременного действия.
Известен радиационно-калориметрический метод измерения теплового потока на стенку в сверхзвуковых течениях на скорости 7 км/с. Метод применен к ударной трубе, канал низкого давления, которой перед волной находился под небольшим вакуумом 0,5 атм. Приращение температуры, измеренное калориметрическим датчиком, формируется из разницы сигналов предварительно нагретой стенки и сигнала в потоке [2].
Недостаток метода в том, что абсолютная температура модели (стенки) не измеряется, а вычисляют по формуле Вина и длине волны излучения, что не способствует точности некоторых расчетов, например, спектральной плотности излучения. Время остывания нагретой фольги датчика гораздо больше ее прогрева, что замедляет измерения в высокоскоростных потоках. Тонкая фольга датчика, толщиной 10 мкм, при регулярном прогреве до 1400°С способна прогорать. Кроме того, метод не рассчитан на давление с высоким вакуумом 10-4 - 10-7 атм перед истечением из сопла в вакуумном блоке.
Известен [3] «Способ определения герметичности системы подачи рабочего тела к источнику плазмы, преимущественно в условиях вакуума», включающий измерение давления и температуры в контролируемом объеме системы на фиксированном интервале времени работы источника плазмы (t0, tk). Измерение рабочих параметров источника плазмы производят для различных значений измеренного давления. В процессе работы измеряют текущие значения параметров передаточных характеристик регулирования расхода рабочего тела давление Рi (t) и температуру Тi (t) в i-x контролируемых объемах, составляющих систему, где i=1, 2, 3… - участки поддержания давления одного номинального диапазона при заданном термостатировании рабочего тела, а по измеренным значениям давления и температуры определяют значения масс рабочего тела в момент времени t0 начала фиксированного интервала.
Недостатком вышеуказанного способа является то что измеряется только разность температур комнатной и в потоке и в том что он применяется для процессов с невысоким вакуумом, температура при котором изменялась незначительно, а, так как процессы медленные, с термостатированием, то теплообмен внутри вакуумного объема выравнивается с окружающей комнатной температурой. Указанный способ не предназначен для установок кратковременного действия (единицы миллисекунд), для обтекания модели на высоких числах Маха (М=5…9), расположенных в большом ( более 800 литров) объеме с высоким вакуумом (10-3 – 10-5 атм), и малым временем между окончанием вакуумирования и запуском сопла ( единицы минут).
Задачей предлагаемого способа является повышение точности измерения температуры нагрева моделей в гиперзвуковом потоке в среднем и высоком вакууме .
Поставленная задача достигается тем , что способ измерения температуры датчиками теплового потока на модели, установленной перед гиперзвуковым соплом в вакуумной камере, заключается в измерении комнатной температуры и сигналов датчика теплового потока: нулевого и при пуске гиперзвукового сопла, вычислении температуры при пуске сопла через разность сигналов, деленную на коэффициент передачи датчика теплового потока и суммирования с комнатной температурой, причем перед запуском сопла проводят процесс вакуумирования, после завершения измеряется нулевой сигнал повторно, вычисляется изменение температуры на величину разности электрических сигналов датчика перед и после вакуумирования, а температуру при пуске сопла вычисляют через разность электрических сигналов датчика после вакуумирования и при пуске сопла, при этом время запуска сопла составляет не более 20% от времени вакуумирования.
Предполагаемое изобретение иллюстрируется следующими графическими материалами:
На фиг 1. Иллюстрация выполнения способа (вакуумирование).
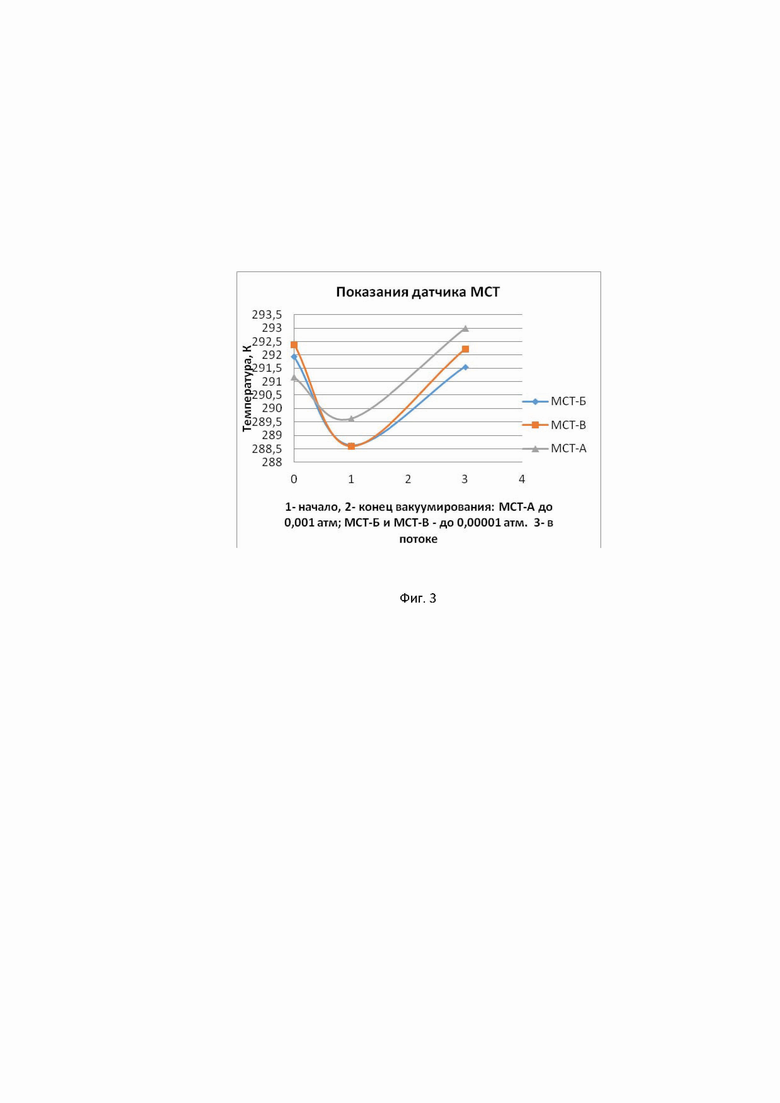
На фиг. 2 Показана диаграмма изменения температуры, измеренной датчиками калориметрическим и коаксиальными датчиками при сквозном вакуумировании и пуске.
На фиг. 3 приведены графики датчика МСТ при разном вакууме в экспериментах.
Предлагаемый способ реализуется на установке, которая содержит ударную трубу, соединенную через сопло с вакуумной камерой в которой размещены модели. Температура торможения потока и тепловой поток на поверхности моделей измеряется датчиками теплового потока, соединенными с регистрирующей аппаратурой. Имитация низкой плотности среды полета создается вакуумированием высокопроизводительными насосами.
Экспериментально было выявлено, что температура модели зависит от глубины и скорости вакуумирование. Вакуумирование высокопроизводительными вакуумными насосами до давлений 10-4(0,1 мБар на фиг.1.) – 10-7 атм вакуумного блока, например, объемом 800 литров занимает 30-40 минут. Затем через 2-3 минуты следует запуск сопла. Температура на модели с датчиками теплового потока сначала поднимается, затем снижается, а после запуска сопла резко возрастает (фиг.2).
Указанные на фиг.2 датчики: СТ1 и СТ2 – калориметрические, МСТ - коаксиальный, термопарный, сертифицированный. Начальное повышение температуры при вакуумировании (этапы 1-4) занимает не более 10% от времени вакуумирования (1-8). В начале быстрого вакуумирования от 1 атм, когда длина свободного пробега частиц газа мала, по поверхности модели проносится поток воздуха. В этом течении молекулы газа сталкиваются, температура повышается. В дальнейшем, когда после действия форвакуумного насоса включается турбомолекулярный насос, откачка идет быстрее, длина свободного пробега молекул увеличивается, падают плотность, температура и давление. При этом, температура ниже при более высоком вакууме.
Затем вакуумные насосы останавливают и через 2–3 минуты осуществляется истечение из сопла. Температура, измеряемая датчиками, увеличивается. Для описанных выше быстрых процессов теплообмен, охлажденного вакуумированием газа внутри аэродинамического блока, с внешней средой через стенку ресивера не успевает свершиться за один эксперимент.
Температура перед запуском сопла после вакуумирования не равна комнатной, ее надо пересчитывать на температуру, соответствующую степени вакумирования. Измерения температуры при вакуумировании показали, что сначала надо соотнести комнатную температуру и показания датчиков до эксперимента Затем пересчитать ее в конце вакуумирования, затем пересчитать при истечении из сопла.
Пример. Коэффициенте передачи датчика с усилителем и фильтром нижних частот К=6,75 мВ/К. Температура комнатная Тк=16,7°С= 289,7 К. Нулевой сигнал датчика МСТ: U0 =28,99 мВ.
При достижении давлении в вакуумной камере 10-4 атм, сигнал датчика UВ =12,4 мВ.
Температура после вакуумирования понизилась:  ТВ =(UВ-U0)/6,75= - 2,457К и стала равной Тв=287,24 К. При пуске сопла: Uп=45,4 мВ. Температура изменилась на (Uп - UВ)/6,75=+4,88 К и стала равной 292,13 К.
ТВ =(UВ-U0)/6,75= - 2,457К и стала равной Тв=287,24 К. При пуске сопла: Uп=45,4 мВ. Температура изменилась на (Uп - UВ)/6,75=+4,88 К и стала равной 292,13 К.
Пример применения соотношения P*V=0,05 -10 отн. ед. для среднего вакуума, где давление (10 -2 - 10 -6 ) атм * 800 л = 8 – 0,08 отн. ед.
Таким образом, экспериментально выявлена возможность сквозной регистрации температур и тепловых потоков на моделях в начале и при окончании откачки вакуумного блока перед воздействием высокоскоростного потока на модель, а затем непосредственно в потоке. Это позволит повысить точно валидации численного и физического моделирования аэродинамических параметров обтекания моделей гиперзвуковым потоком в глубоком вакууме.
Использованные источники
1. Zapryagaev V. I. et al. Heat transfer in supersonic separated flow of the compression corner. // J. Phys.: Conf. Ser. 1382 012049.—2019. — doi:10.1088/1742-6596/1382/1/012049.
2. Базовкин В. М., Ковчавцев А. П., Курышев Г. Л. и др. Численное и экспериментальное исследование обтекания двумерного угла сжатия гиперзвуковым потоком. // Вестник НГУ. Серия: Физика. .—2007. Том 2, выпуск 1.
3. Данилевич А.И. О радиационно-калориметрическом методе измерения теплового потока в сверхзвуковых течениях газа.//Ученые записки ЦАГИ. 1981. Том 12. №2.
4. Способ определения герметичности системы подачи рабочего тела к источнику плазмы, преимущественно в условиях вакуума. Патент 2 377 522. Опубликовано 27.12.2009. Бюл. № 36.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОЗДАНИЯ ПОТОКА ГАЗА В ГИПЕРЗВУКОВОЙ ВАКУУМНОЙ АЭРОДИНАМИЧЕСКОЙ ТРУБЕ И АЭРОДИНАМИЧЕСКАЯ ТРУБА | 2011 |
|
RU2482457C1 |
| СПОСОБ СОЗДАНИЯ ПОТОКА ГАЗА В ГИПЕРЗВУКОВОЙ АЭРОДИНАМИЧЕСКОЙ ТРУБЕ И АЭРОДИНАМИЧЕСКАЯ ТРУБА | 2013 |
|
RU2526505C1 |
| УСТРОЙСТВО ДЛЯ ОТБОРА ПРОБЫ ГАЗА В ВЫСОКОЭНТАЛЬПИЙНЫХ УСТАНОВКАХ КРАТКОВРЕМЕННОГО ДЕЙСТВИЯ И СПОСОБ ИЗМЕРЕНИЯ РАСХОДА ГАЗА С ИСПОЛЬЗОВАНИЕМ ЭТОГО УСТРОЙСТВА | 2014 |
|
RU2582805C9 |
| Способ проведения высокотемпературных испытаний в аэродинамической трубе | 2024 |
|
RU2828615C1 |
| Ударная гиперзвуковая аэродинамическая труба | 2020 |
|
RU2735626C1 |
| Гиперзвуковая ударная аэродинамическая труба | 2016 |
|
RU2621367C1 |
| Способ определения каталитической активности материалов и покрытий | 2021 |
|
RU2792255C1 |
| Импульсная аэродинамическая установка | 2023 |
|
RU2818485C1 |
| Способ определения удельной объемной теплоты сгорания природного горючего газа в бомбовом калориметре и устройство для заполнения калориметрической бомбы горючим газом | 2017 |
|
RU2646445C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ПОВОРОТА ВЕКТОРА СИЛЫ ТЯГИ ГИПЕРЗВУКОВОГО ПРЯМОТОЧНОГО ВОЗДУШНО-РЕАКТИВНОГО ДВИГАТЕЛЯ С КОСЫМ СРЕЗОМ СОПЛА ПО РЕЗУЛЬТАТАМ ЛЕТНЫХ ИСПЫТАНИЙ ЕГО НА ГИПЕРЗВУКОВОЙ ЛЕТАЮЩЕЙ ЛАБОРАТОРИИ | 2010 |
|
RU2445599C1 |
Способ относится к области экспериментальной аэротермодинамики, в частности к лабораторным вакуумным аэродинамическим установкам кратковременного действия, обеспечивающим моделирование условий полета летательных аппаратов в верхних слоях атмосферы с большими числами Маха. Способ измерения температуры модели при вакуумировании в гиперзвуковом потоке заключается в измерении комнатной температуры и сигналов датчика теплового потока: нулевого и при пуске гиперзвукового сопла, вычислении температуры при пуске сопла через разность сигналов, деленную на коэффициент передачи датчика теплового потока, и суммировании с комнатной температурой. При этом перед запуском сопла проводят процесс вакуумирования, после завершения измеряется нулевой сигнал повторно, вычисляется изменение температуры на величину разности электрических сигналов датчика перед и после вакуумирования, а температуру при пуске сопла вычисляют через разность электрических сигналов датчика после вакуумирования и при пуске сопла. Время запуска сопла составляет не более 20% от времени вакуумирования. В результате повышается точность измерения температуры нагрева моделей в гиперзвуковом потоке в среднем и высоком вакууме. 3 ил.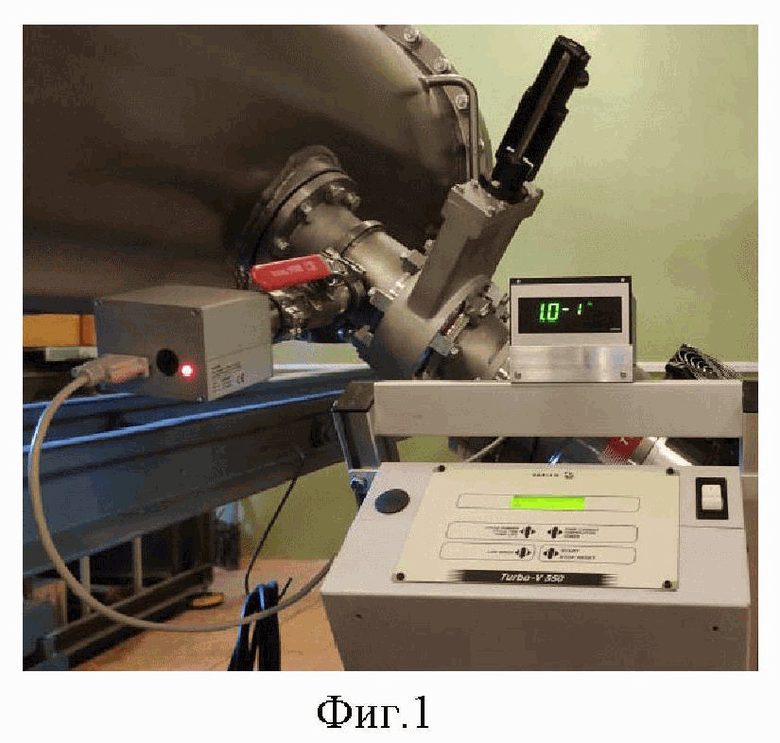
Способ измерения температуры модели при вакуумировании в гиперзвуковом потоке, заключающийся в измерении комнатной температуры и сигналов датчика теплового потока: нулевого и при пуске гиперзвукового сопла, вычислении температуры при пуске сопла через разность сигналов, деленную на коэффициент передачи датчика теплового потока, и суммировании с комнатной температурой, отличающийся тем, что перед запуском сопла проводят процесс вакуумирования, после завершения измеряется нулевой сигнал повторно, вычисляется изменение температуры на величину разности электрических сигналов датчика перед и после вакуумирования, а температуру при пуске сопла вычисляют через разность электрических сигналов датчика после вакуумирования и при пуске сопла, при этом время запуска сопла составляет не более 20% от времени вакуумирования.
| СПОСОБ ТЕПЛОПРОЧНОСТНЫХ ИСПЫТАНИЙ ОБТЕКАТЕЛЕЙ ГИПЕРЗВУКОВЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И УСТАНОВКА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2016 |
|
RU2625637C1 |
| УСТРОЙСТВО ИМПУЛЬСНОГО НАГРЕВА ВОЗДУХА | 2010 |
|
RU2426085C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ТЕРМОАНЕМОМЕТРА (ВАРИАНТЫ) | 2013 |
|
RU2548612C2 |
| WO 2005095934 A1, 13.10.2005. | |||

