Данное изобретение относится к моющему устройству для транспортных средств. В частности, оно относится к автоматизированному моющему устройству для транспортных средств.
Из DE 10 2014 112 123 A1 известна моющая система для транспортных средств и способ мойки транспортных средств. Согласно этому известному ранее предложению мойка транспортных средств производится промышленными роботами, которые выполнены в виде роботов с шарнирно-сочлененным рычагом или, соответственно, роботов с поворотным рычагом и должны имитировать производимую вручную чистку транспортного средства.
Более раннее предложение оставляет желать лучшего. Таким образом, в основе настоящего изобретения лежит проблема создания улучшенного моющего устройства для мойки транспортных средств.
Согласно решению, предложенному данным изобретением, моющее устройство включает в себя по меньшей мере одного дельта-робота, который на конце своей рабочей стороны несет обрабатывающий элемент. Под дельта-роботом подразумевается исполнительное устройство, основанное на кинематике параллелограмма. Благодаря специальной кинематике дельтообразной структуры рычажные звенья при движении образуют параллелограммы, так что вращательные степени свободы рабочей пластины, укрепленной на рычажных звеньях, существенно ограничены. Все рычажные звенья дельта-робота как правило расположены шарнирно на этой рабочей пластине. Другие концы рычажных звеньев могут быть соединены с выполненным с возможностью поворота приводным рычагом, поворотное движение которого вызывает движение рабочей пластины. Альтернативно или дополнительно возможно соединение некоторых или, соответственно, всех рычажных звеньев дельта-робота с промежуточным элементом, который выполнен с возможностью перемещения. Для увеличения зоны досягаемости возможно только линейное перемещение промежуточного элемента. Однако с расчетом на оптимальное прилегание обрабатывающего элемента к поверхности транспортного средства следует предпочесть возможность поворота промежуточного элемента. Промежуточный элемент должен быть выполнен с возможностью поворота по меньшей мере на +/-50°, особо предпочтительно на +/-70° и, кроме того, особо предпочтительно на +/-90°. Промежуточный элемент обычно выполнен в виде структуры несущих рычагов облегченной конструкции. При этом промежуточный элемент предпочтительно выполнен с возможностью перемещения по линейным направляющим. Промежуточный элемент предпочтительно удерживается с возможностью перемещения на трех линейных направляющих. При этом посредством изменения положения каждой отдельной линейной направляющей возможен также поворот промежуточного элемента в вышеуказанных пределах для адаптации углового положения рабочей пластины относительно очищаемой поверхности. При этом соединение между промежуточным элементом и линейной направляющей предпочтительно осуществляется посредством пар соединительных рычагов соединительных стержней, которые шарнирно опираются как на линейную направляющую, так и на промежуточный элемент.
Дельта-робот может иметь три, предпочтительно четыре, жестких рычажных звена, все они предпочтительно соединены с основанием посредством приводных рычагов с возможностью поворота. При этом могут быть также предусмотрены приводные рычаги в виде пар приводных рычагов, причем элементы пары приводных рычагов обычно проходят параллельно друг другу и каждый из них расположен шарнирно на одном и том же приводном рычаге и на рабочей пластине. В результате этого рабочая пластина получает более стабильную поддержку и выравнивание положения.
Дельта-робот может быть выполнен в виде робота-трипода или робота-гексапода. Робот-трипод представляет собой подвижную машину, имеющую три приводных элемента и три степени свободы. Робот-гексапод имеет шесть рычажных звеньев с изменяемой длиной и делает возможным подвижность в шести степенях свободы, а именно трех линейных и трех вращательных степенях свободы. Благодаря параллельному расположению приводов робот-гексапод имеет лучшее соотношение между полезной нагрузкой и собственным весом по сравнению с роботами, имеющими последовательную структуру. В частности, при варианте осуществления в виде робота-гексапода рычажные звенья с изменяемой длиной предпочтительно расположены на жестком промежуточном элементе и соединены с ним.
При конкретном исполнении для закрепления одной лишь рабочей пластины используется вариант осуществления в виде трипода или, соответственно, гексапода. Эта поддержка может осуществляться посредством неприводимых в движение рычажных звеньев конструкции трипода или, соответственно, гексапода. Рычажные звенья могут в лучшем случае иметь определенные амортизирующие свойства, т.е. быть выполненными с возможностью пассивного изменения их длины в определенных границах. При этом выравнивание рабочей пластины и ее позиционирование относительно транспортного средства предпочтительно производится исключительно посредством соединительных стержней, которые согласно данному изобретению рассматриваются - по описанному выше - как жесткие рычажные звенья и воздействуют на промежуточный элемент, перемещая его с подвижностью в пределах шести степеней свободы, а именно трех линейных и трех вращательных степеней свободы. Между этим промежуточным элементом и рабочей пластиной находится описанная выше конструкция трипода или гексапода как устройства с не приводимыми в движение рычажными звеньями, которые могут иметь лишь вышеупомянутое амортизирующее свойство. Однако рычажные звенья могут быть и совершенно жесткими.
Дельта-робот может выполнять движения быстро и эффективно. Кроме того, посредством адаптированного приведения в действие приводных рычагов возможна регулировка угла наклона рабочей пластины, так что возможно точное размещение рабочей пластины или удерживаемого ею обрабатывающего элемента параллельно очищаемой поверхности транспортного средства.
В соответствии с этим, дельта-робот позволяет достигать при периодически повторяемых движениях существенно более высокой частоты по сравнению с роботами с шарнирно-сочлененной рукой или, соответственно, роботами с поворотным рычагом - например, когда необходимо оттирать или полировать очищаемое транспортное средство.
На основе этих эксплуатационных свойств дельта-робота моющее устройство согласно изобретению может мыть транспортное средство существенно интенсивнее и лучше, чем согласно известному ранее решению по DE 10 2014 112 123 A1. Под термином "дельта-робот" согласно данному изобретению понимаются исполнительные элементы, обозначаемые в технике как дельта-роботы или параллельные роботы и содержащие по меньшей мере два, предпочтительно три или четыре рычажных звена.
Дельта-робот для осуществления данного изобретения может иметь по меньшей мере три параллельных рычажных звена, которые образуют соответственно параллелограммы. Точно так же возможно использование дельта-робота, имеющего четыре или больше рычажных звеньев. При этом дельта-робот с четырьмя рычажными звеньями подходит, в частности, для регулирования углового положения рабочей пластины и, таким образом, для расположения параллельно соответствующей очищаемой поверхности автомобиля.
Обрабатывающий элемент предпочтительно выполнен в виде очищающего элемента, адаптированного для непосредственного контакта с поверхностью транспортного средства. В соответствии с этим обрабатывающий элемент предпочтительно представляет собой губку или искусственный мех, тряпку или щетку. В качестве составной части устройства для очистки могут быть предусмотрены по меньшей мере два обрабатывающих элемента, имеющие разную жесткость и/или разную толщину и/или разную всасывающую способность и/или разную длину волокон. При этом разные обрабатывающие элементы делают возможной адаптированную для каждого случая обработку поверхности транспортного средства. Было выявлено, что транспортные средства, имеющие красочное покрытие типа "металлик", нуждаются в обработке, отличной от обработки для транспортных средств без такого покрытия. На рынке имеются также транспортные средства с нанопокрытием, которые требуют особенно щадящего воздействия обрабатывающим элементом. С одной стороны, это достигается видом обработки транспортного средства. Однако, с другой стороны, это достигается также выбором обрабатывающего элемента, адаптированного для необходимой в каждом случае обработки. Подразумевается, что еще и сам этот обрабатывающий элемент может быть расположен подвижно относительно рабочей пластины, например, для выполнения вращательного движения, в то время как рычажные звенья дельта-робота перемещают обрабатывающий элемент линейно относительно очищаемой поверхности. В результате этого возможно повышение интенсивности очистки.
Альтернативно возможно также выполнение обрабатывающего элемента в виде опрыскивающего элемента. Такой опрыскивающий элемент предназначен для обрызгивания обычно жидким или пастообразным веществом для очистки или, соответственно, веществом для ухода. Опрыскивающий элемент образован, в частности, сопловым элементом очистителя высокого давления, например, для набрызгивания на транспортное средство, в ходе предварительной мойки, воды, при необходимости содержащей моющее средство. Однако опрыскивающий элемент может также и наносить только вещества для ухода в форме воска, консервирующих средств, герметика или других химических субстанций. Для этого опрыскивающий элемент может содержать обогреваемый баллон-распылитель, чтобы посредством нагревания делать скорее вязкий материал более жидким. Опрыскивающий элемент может содержать высоконапорное сопло, которое выдает из сопла субстанцию под значительным давлением. Однако возможна также эксплуатация распылителя с относительно низким давлением. В частности, распылитель может также производить туман, который равномерно осаждается на поверхность транспортного средства, подлежащего очистке.
Дополнительно или альтернативно обрабатывающий элемент возможно выполнение в виде высушивающего элемента для сушки транспортного средства. Такой высушивающий элемент может быть образован тряпкой для сушки. Однако точно так же он может быть образован соплом для сушки, которое при помощи высокого давления снимает капельки воды с поверхности транспортного средства, подлежащего очистке. При этом высушивающий элемент сушки может быть выполнен, в частности, таким образом, что он подобно ножу приподнимает капельки воды, удерживающиеся на транспортном средстве, и снимает их, как это по существу описано в WO 2013/144556 A1.
Упомянутые выше обрабатывающие элементы как правило выполнены с возможностью соединения с рабочей пластиной или жестко соединены с сегментом рабочей пластины, который посредством разъемного затвора может соединяться с сегментом рабочей пластины на стороне робота, чтобы предусматривать на роботе или на роботах различные обрабатывающие элементы по выбору. При этом замена обрабатывающих элементов предпочтительно производится автоматически, например, посредством управляемой муфты, которая временно укрепляет соответствующий обрабатывающий элемент на рабочей пластине со стороны робота. Если обрабатывающий элемент выполнен в виде опрыскивающего элемента, между основанием робота и рабочей пластиной находится по меньшей мере один, при необходимости множество трубопроводов для подвода к рабочей пластине вещества для очистки или, соответственно, для ухода.
Обрабатывающий элемент, выполненный в виде опрыскивающего элемента, может быть по существу известным способом предусмотрен на входе линии для автоматической мойки, которая может представлять собой вариант осуществления моющего устройства для транспортных средств. При этом на транспортное средство обычно воздействуют множество опрыскивающих элементов одновременно. При этом дельта-роботы с опрыскивающими элементами предпочтительно предусмотрены и выполнены в таком положении относительно друг друга, что они могут воздействовать на каждое из боковых колес транспортного средства, подлежащего очистке. При предварительной очистке на входе линии для автоматической мойки моющее устройство, выполненное с опрыскивающим элементом, обычно проводит по всему транспортному средству. Уже при этом возможен ввод данных о трехмерной форме транспортного средства в управляющее устройство моющего устройства, так что распылитель опрыскивающего элемента может быть размещен вблизи транспортного средства, не наталкиваясь на транспортное средство или не находясь слишком близко к транспортному средству, что могло бы повлечь за собой чрезмерно высокий напор воды, который может повредить поверхность лака.
Моющее устройство может быть снабжено датчиком, который заранее распознает возможный контакт между обрабатывающим элементом и транспортным средством и включает противодействующие регулирующие меры, позволяя предотвращать повреждения. Этот датчик может работать бесконтактным образом, чтобы регистрировать сближение обрабатывающего элемента с транспортным средством. При выполнении обрабатывающего элемента в виде очищающего элемента датчик позволяет также следить за прижимным усилием, действующим на поверхность транспортного средства, которое можно изменять в зависимости от степени загрязнения. Такой датчик давления позволяет реализовать закрытый контур регулирования для контроля прижимного усилия, предварительно заданного, однако на некоторых участках варьируемого в зависимости от транспортного средства.
Согласно предпочтительному варианту усовершенствования настоящего изобретения дельта-робот управляется посредством управляющего устройства, которое с целью позиционирования обрабатывающего элемента обрабатывает данные контура транспортного средства, подлежащего очистке, и данные об интенсивности очистки. На основе данных контура обрабатывающий элемент прижимают к поверхности транспортного средства, подлежащего очистке, в заранее определенном желаемом направлении и с заранее заданным прижимным усилием. Данные об интенсивности очистки обычно распределены в соответствии с местоположением. Данные об интенсивности очистки указывают, в частности, сведения о распределении варьируемой степени очистки по поверхности транспортного средства. В соответствии с этим данные об интенсивности очистки позволяют получить пространственное распределение соответствующей интенсивности очистки. В основе предложения лежит осознание того, что разные участки транспортного средства нуждаются в очистке различной интенсивности. Так, например, радиатор и иногда также капот и ветровое стекло загрязнены значительно больше, чем задняя часть кузова транспортного средства. В соответствии с этим в области передней части кузова транспортного средства очистка должна производиться интенсивнее, тогда как с учетом бережного обращения с поверхностью транспортного средства, в частности, с лакированными поверхностями, очистка не должна быть и слишком агрессивной. В распределении данных об интенсивности очистки по поверхности транспортного средства варьируют по меньшей мере один из следующих параметров для мойки транспортного средства: давление воздействия обрабатывающего элемента на очищаемую поверхность транспортного средства; скорость воздействия обрабатывающего элемента на очищаемую поверхность транспортного средства; продолжительность воздействия на заданном участке поверхности транспортного средства; форма перемещения при воздействии обрабатывающего элемента на заданном участке поверхности транспортного средства. Таким образом, при помощи данных об интенсивности очистки возможно задание различных параметров очистки при мытье поверхности транспортного средства, варьирующих в зависимости от положения в пространстве. Сильно загрязненные поверхности чистят интенсивно, например, повышая давление воздействия или, соответственно, срок воздействия или скорость воздействия. При этом под скоростью воздействия следует понимать относительное перемещение обрабатывающего элемента и поверхности. Продолжительность воздействия как правило рассматривается по отношению к заданной области поверхности транспортного средства. Таким образом, варьируется то, активен ли обрабатывающий элемент в течение довольно долгого времени на заданной области поверхности, или же проходит ли обрабатывающий элемент по соответствующей области лишь кратковременно. Под формой перемещения при воздействии следует понимать тот путь, который обрабатывающий элемент выбирает в пределах заданной области поверхности при ее очистке. Так, обрабатывающий элемент может двигаться попеременно туда и обратно (осуществлять оттирание). Но обрабатывающий элемент может и проводиться по очищаемой области поверхности круговыми движениями. Эти круговые движения могут проводиться с одним и тем же радиусом или спиралеобразно. Возможно также комбинирование соответствующих движений друг с другом. В частности, возможно также попеременное выполнение спиралеобразных или круговых движений.
Устройство может содержать также 3D-камеру для учета положения транспортного средства в помещении. При помощи этой 3D-камеры как правило производится сопоставление изображений в 3D, при котором камера регистрирует множество точек изображения , относящихся к транспортному средству. Регистрируемые таким образом точки изображения в процессе сопоставления совмещают с точками виртуального изображения транспортного средства (например, файла CAD), так что робот, обращаясь к данным CAD, знает все поверхности и их размеры.
Согласно предпочтительному варианту усовершенствования настоящего изобретения дельта-робот управляется посредством управляющего устройства в зависимости от данных погоды и/или времени года. Такие данные позволяют оптимизировать процесс очистки. Так, например, зимой, т.е. в течение месяцев с инеем, в принципе возможен выбор программы, которая сначала удаляет налипающую на транспортное средство соль для посыпки улиц. Если на основе погодной информации известно о продолжительной сухости и, таким образом, об отсутствии ледяной корки, то управляющее устройство может быть настроено таким образом, что оно, вопреки температурам ниже нуля, отказывается от интенсивной промывки для смывания соли в начале процесса очистки. При отсутствии осадков летом управляющее устройство также может, например, предпочесть в начале процесса очистки удаление пыли, например, посредством опрыскивающего элемента или даже только дутьевого сопла, которое снимает налипшую на транспортное средство пыль. При этом возможна регистрация погодных данных посредством присоединенной к моющему устройству метеостанции и, таким образом, локально. Альтернативно или дополнительно возможно считывание погодных данных, основанных на наблюдениях метеостанций, посредством интерфейса. Если, например, при предварительно проведенном анализе поверхностей транспортного средства, для дифференциации поверхностей анализируется блеск соответствующих поверхностей, то на основе погодных данных можно, например, сделать вывод о присутствии пыльцы весной, чтобы с учетом этого корректировать полученные значения интенсивности блеска.
Согласно следующему предпочтительному варианту осуществления настоящего изобретения моющее устройство включает в себя магазин обрабатывающих элементов, к которому дельта-робот имеет доступ для автоматизированной замены обрабатывающего элемента. В соответствии с этим обрабатывающий элемент как правило соединен с концом рабочей стороны дельта-робота, т.е. с рабочей пластиной, посредством разъемного соединения. Разъемное соединение выполнено с возможностью автоматического разъединения. Так, например, обрабатывающий элемент может быть закреплен на рабочей пластине с геометрическим замыканием или с силовым замыканием. На магазине обрабатывающих элементов могут быть предусмотрены исполнительные элементы для разъединения рабочей пластины и обрабатывающего элемента. Также могут быть предусмотрены удерживающие элементы, которые удерживают заменяемый обрабатывающий элемент, чтобы движение дельта-робота в направлении от магазина обрабатывающих элементов приводило к разъединению обрабатывающего элемента и рабочей пластины. На магазине обрабатывающих элементов предпочтительно предусмотрены обрабатывающие элементы, имеющие различные профили. Эти профильные обрабатывающие элементы подготовлены для того, чтобы оптимальным образом очищать области поверхности транспортного средства, имеющие разную форму. Так, например, в магазине обрабатывающих элементов возможно наличие по меньшей мере одного обрабатывающего элемента, имеющего специальную форму, который наилучшим образом охватывает и чистит перегородки или решетки в области вентиляционных отверстий в кузове транспортного средства. Возможны также соответствующие обрабатывающие элементы, выполненные адаптированными для отдельных очищаемых поверхностей. Так, обрабатывающий элемент для очистки стеклянных поверхностей (стекла фар, окон) может иметь качество материала и/или свойство, отличные от характеристик обрабатывающего элемента для мытья лакированных поверхностей транспортного средства. В качестве еще одного индивидуально адаптированного обрабатывающего элемента может быть предусмотрена также щетка для колесных дисков или аналогичный элемент, т.е., таким образом, обрабатывающий элемент, который выполнен специально адаптированным для очистки дисков или, соответственно, шин.
В качестве очищающего элемента может выступать также кассета, которая разделена на сегменты. При этом возможно такое управление дельта-роботом, что для воздействия на поверхность транспортного средства используется в каждом случае только один из сегментов. Сегменты могут содержать идентичные или выполненные различным образом сегменты очищающих элементов Посредством адаптированного управляющего устройства, в частности, направления отдельных сегментов под определенными углами, возможно их избирательное приведение в действие, например, в зависимости от характеристики поверхности участка транспортного средства, подлежащего очистке.
Согласно следующему предпочтительному варианту осуществления настоящего изобретения моющее устройство имеет устройство обработки обрабатывающих элементов для восстановления использованных обрабатывающих элементов. В основе этого предложения лежит соображение о том, что обрабатывающий элемент имеет только определенный срок службы для очистки, в то же время, однако после восстановления он снова может использоваться для очистки транспортного средства. В устройстве обработки обрабатывающих элементов соответствующий обрабатывающий элемент подвергается восстановлению и подготавливается для нового применения при мойке транспортного средства. Управляющее устройство может быть выполнено таким образом, что после каждой очистки индивидуального транспортного средства соответствующий обрабатывающий элемент заменяется и восстанавливается. Точно так же возможно, что при каждой замене обрабатывающего элемента соответствующий замененный обрабатывающий элемент восстанавливается также в устройстве обработки обрабатывающих средств.
Обрабатывающее устройство предпочтительно имеет проходящий по периметру участок обработки, на котором обрабатывающие элементы подвергаются очистке и/или проверке и/или снабжаются чистящими или полировальными материалами и/или заменяются и/или просушиваются. Таким образом, представляется возможным приведение в действие для сушки транспортного средства одного обрабатывающего элемента в форме тряпки, посредством которой транспортное средство высушивают, как человеческой рукой, причем пропитанный водой обрабатывающий элемент после этого передается на устройство обработки обрабатывающих средств, чтобы чистить его или мыть и просушивать. Таким образом, возможна сушка транспортного средства посредством высушивающей тряпки в качестве обрабатывающего элемента, как человеческой рукой. Благодаря этому усовершенствованию изобретения обеспечена возможность сушки всего транспортного средства полностью, что обычно невозможно при сушке теплым воздухом, какой она применяется в линиях для автоматической мойки или, соответственно, в моечных установках портального типа. У известных ранее моющих устройств в определенных областях транспортного средства как правило остаются капли воды, которые видны на вымытом транспортном средстве и оставляют следы.
В процессе восстановления обрабатывающего элемента он может также оставаться на дельта-роботе и выжиматься посредством активации рычагов робота или предусмотренного на рабочей пластине привода для поворачивания или вращения обрабатывающего элемента, чтобы избавиться от оставшейся на нем влаги. Альтернативно возможно также отсоединение обрабатывающего элемента от дельта-робота и его восстановление в устройстве обработки обрабатывающих элементов. В рамках подготовки обрабатывающего элемента возможно также его нагревание, для использования его в виде подогретого обрабатывающего элемента, в частности, подогретого высушивающего элемента, вследствие чего эффективность улучшается. Подогретый обрабатывающий элемент улучшает, например, также нанесение на поверхность транспортного средства для ухода благодаря повышению его текучести. Таким образом, к обрабатывающему элементу также возможно присоединение обогревающего устройства, которое эксплуатируется при воздействии обрабатывающего элемента на поверхность транспортного средства. Возможна эксплуатация такого обогревающего устройства, например, с нагревательным элементом PTC, который благодаря его саморегулирующимся свойствам просто и надежно настраивается на определенную рабочую температуру.
Контроль моющего элемента в устройстве обработки обрабатывающих элементов проводится, в частности, с учетом исправного состояния обрабатывающего элемента, чтобы предотвратить появление царапин, оставляемых дефектными обрабатывающими элементами при мойке транспортного средства.
Зона досягаемости по меньшей мере одного робота выходит за линию симметрии относительно продольного направления транспортного средства, так что для очистки всего транспортного средства достаточно единственного робота.
Согласно предпочтительному варианту усовершенствования настоящего изобретения моющее устройство в виде линии для автоматической мойки оборудовано перемещающим устройством для перемещения транспортного средства. При этом, как правило происходит перемещение относительно по меньшей мере одного дельта-робота. При этом обычно происходит непрерывное или прерывистое движение. Однако возможно такое расположение дельта-робота с возможностью перемещения на направляющей, что это позволяет перемещать его вокруг транспортного средства, подлежащего очистке.
Этот дельта-робот или множество дельта-роботов могут быть полностью подвижны, причем подвижность дельта-роботов как правило представлена так, что обеспечена возможность перемещения транспортного средства относительно роботов, так что дельта-робот или дельта-роботы могут, с одной стороны, быть перемещаемы вместе с транспортным средством, при этом, однако, возможно их позиционирование относительно транспортного средства. Дополнительно происходит позиционирование обрабатывающего элемента посредством рычажных звеньев соответствующих дельта-роботов. Перемещающее устройство линии для автоматической мойки имеет по существу известное преимущество, состоящее в том, что возможно проведение транспортного средства сквозь линию для автоматической мойки, чтобы в конце процесса мойки выдавалось чистое транспортное средство. Линия для автоматической мойки согласно настоящему изобретению содержит переднее, в направлении движения перемещающего устройства, устройство распознавания и расположенную за ним в направлении движения моющую установку, содержащую по меньшей мере одного из дельта-роботов. Устройство распознавания имеет средства распознавания для распознавания перемещаемого транспортного средства. При помощи средства распознавания возможна, например, идентификация номерного знака транспортного средства. Таким образом, возможно узнавание определенного транспортного средства, параметры которого записаны в блоке данных управляющего устройства, и выполнение заданной программы очистки. Так, возможно задание пользователем транспортного средства программы очистки, предназначенной для этого транспортного средства, которая выполняется соответственно при распознавании номерного знака. Однако в качестве средства распознавания может быть предусмотрено также и визуальное устройство распознавания, которое пригодно для определения контура транспортного средства в целом. При этом в качестве блока данных, который используется для определения данных профиля и данных об интенсивности очистки, возможно создание изображения транспортного средства, воспроизводящего контур транспортного средства и различные его поверхности с их качеством. Однако может оказаться достаточным такое распознавание транспортного средства, при котором сравнение с информацией, записанной в базе данных, позволяет установить, какую модель транспортного средства и какого года выпуска предстоит мыть. Распознавание модели и года выпуска приводит к запросу из базы данных информации о соответствующем транспортном средстве, которая и служит для управления дельта-роботом или дельта-роботами.
Таким образом, управляющее устройство, управляющее дельта-роботом, имея установленные средством распознавания сведения о положении, типе и/или оснащении транспортного средства, задает программу очистки для соответствующего транспортного средства. При этом программа очистки определяется не только данными контура и, таким образом, сведениями о положении места, где обрабатывающий элемент осуществляет воздействие. Напротив, производится также выбор, считывание или назначение данных об интенсивности очистки с их пространственным распределением для оптимальной очистки транспортного средства.
Моющее устройство предпочтительно содержит моющую установку, имеющую множество дельта-роботов, предпочтительно расположенных неподвижно относительно друг друга. При этом дельта-роботы в качестве боковых дельта-роботов расположены напротив друг друга таким образом, что они, находясь по бокам, принимают подвергаемое мойке транспортное средство между ними. В соответствии с этим такие боковые дельта-роботы используются для очистки дверей и боковых поверхностей транспортного средства. Дополнительно или альтернативно моющая установка может иметь одного или множество верхних дельта-роботов, которые расположены над местом установки для транспортного средства, для очистки крыши транспортного средства. Кроме того, альтернативно или дополнительно моющая установка может иметь предусмотренных напротив друг друга передних или задних дельта-роботов, посредством которых должны очищаться поверхности передней части или поверхности задней части транспортного средства и которые принимают транспортное средство с этими поверхностями передней части или задней части между ними. Каждый из вышеупомянутых дельта-роботов или избранные из них или только единственный дельта-робот может располагаться с возможностью перемещения по высоте и/или продольного перемещения или поперечного перемещения. При этом как правило по меньшей мере один передний или задний дельта-робот выполнен с возможностью перемещения по высоте, чтобы обеспечивать возможность заезда транспортного средства на место его установки. Подразумевается, что возможно также наличие под дном транспортного средства одного или множества роботов, предусмотренных для очистки транспортного средства.
Согласно предпочтительному варианту усовершенствования настоящего изобретения дельта-робот соединен с линейной направляющей, которая предпочтительно содержит держатель, выполненный с возможностью перемещения в продольном направлении транспортного средства, подлежащего очистке, и по которой возможно линейное перемещение дельта-робота. Этот дополнительный привод дельта-робота повышает дальность его действия при компактной и легкой конструкции, вследствие чего сохраняются преимущества дельта-робота, лучшее соотношение полезной нагрузки и собственной массы, что позволяет быстро перемещать обрабатывающий элемент и силы инерции не слишком затрудняют обработку транспортного средства при необходимости обработки с переменным направлением.
Линейная направляющая простирается по существу в продольном направлении транспортного средства. Это выражение должно означать, что основное направление прохождения линейной направляющей совпадает с основным направлением протяженности транспортного средства. Линейная направляющая не должна проходить строго параллельно продольному направлению транспортного средства.
При этом продольное направление транспортного средства, подлежащего очистке, соответствует направлению движения транспортного средства, подлежащего проходу через линию для автоматической мойки и, таким образом, направлению движения транспортного средства. Линейные направляющие обычно обеспечены на обеих сторонах транспортного средства, также и в нижней области. Таким образом, максимальное расстояние между линейными направляющими в поперечном направлении соответствует по меньшей мере ширине транспортного средства с добавлением определенного допуска, от 10 до 20% ширины транспортного средства. Если в данном случае ориентируются на максимальное поперечное расстояние, это обусловлено тем, что моющее устройство может содержать множество линейных направляющих, не только по сторонам рядом с транспортным средством, но и линейные направляющие, предусмотренные над ним, т.е. диагонально над транспортным средством и при необходимости. относительно далеко над транспортным средством в середине. Расстояние между ними в поперечном направлении, разумеется, меньше, чем расстояние в поперечном направлении между нижними линейными направляющими.
Согласно предпочтительному варианту усовершенствования настоящего изобретения между держателем и элементом на рабочей стороне расположен промежуточный элемент, к которому шарнирно присоединены соединительные стержни и рычажные звенья. При этом соединительные стержни предусмотрены между держателем и промежуточным элементом. Соединительные стержни как правило имеют неизменяемую длину. Эти соединительные стержни могут предусматриваться также попарно. Каждый стержень пары соединительных стержней как правило проходит параллельно другому стержню той же самой пары. Крепление соединительного стержня к держателю или, соответственно, к промежуточному элементу как правило шарнирное. Шарнир обычно имеет три степени свободы и предпочтительно выполнен в виде шарового шарнир. Рычажные звенья проходят между держателем и рабочей пластиной. Рычажные звенья как правило выполнены с возможностью изменения длины и обычно выполнены в виде гидравлических или пневматических цилиндров. Для оптимального положения обрабатывающего элемента как правило предусмотрены шесть рычажных звеньев в виде гексапода. При этом концы рычажных звеньев на стороне крепления, которые расположены на держателе относительно близко друг к другу, на стороне промежуточного элемента находятся относительно далеко друг от друга, вследствие чего становится возможным надежное и точно управляемое положение обрабатывающего элемента. Каждое из рычажных звеньев также обычно соединено с тремя степенями свободы соответственно шарнирно с держателем и шарнирно с рабочей пластиной. Сама рабочая пластина как правило несет на себе непосредственно обрабатывающий элемент, причем могут быть предусмотрены вышеупомянутые виды крепления для разъемного соединения обрабатывающего элемента с рабочей пластиной. Во всяком случае, соединение между рабочей пластиной и обрабатывающим элементом как правило жесткое, так что направление положения рабочей пластины точно соответствует направлению положения обрабатывающего элемента относительно очищаемой поверхности транспортного средства.
Держатель предпочтительно выполнен в виде облегченной детали. Особенно предпочтительно выполнение держателя в виде консольной конструкции с тонкими консолями, жестко соединенными друг с другом. Здесь необходимо также следить за тем, чтобы собственная масса промежуточного элемента была как можно меньше, но в то же время обеспечивалась необходимая жесткость для достаточно надежного прилегания с нажимом обрабатывающего элемента к поверхности транспортного средства, подлежащего очистке. Консоли могут быть выполнены из углеродного материала.
Согласно следующему предпочтительному варианту осуществления настоящего изобретения для каждого промежуточного элемента предусмотрены по меньшей мере три линейных направляющих, как правило, ровно три линейных направляющих. Таким образом, предоставляется моющее устройство, выполненное относительно плоским, между тем делающее возможным некоторое количество степеней свободы.
Три линейных направляющих к каждому промежуточному элементу не лежат в одной плоскости, чтобы имелась возможность оптимальным образом управлять положением промежуточного элемента и изменять его.
Каждый комплект с тремя линейными направляющими как правило имеет нижнюю линейную направляющую, например, на высоте колес транспортного средства, подлежащего очистке, верхнюю линейную направляющую выше транспортного средства и внешнюю линейную направляющую, например, на той же высоте, что и верхняя линейная направляющая и, например, на том же расстоянии от транспортного средства, что и нижняя линейная направляющая. Для расстояния друг от друга в поперечном направлении между нижними линейными направляющими разных комплектов предпочтительно действует вышеупомянутое условие. Высота верхней линейной направляющей выбирается с учетом обычной высоты очищаемых транспортных средств. Верхняя линейная направляющая как правило находится на высоте между 1,80 м и 2,50 м от пола.
Предпочтительно предусмотрены два комплекта из трех выполненных таким образом линейных направляющих, поставленных в соответствие друг другу посредством промежуточного элемента. Вследствие этого возможна обработка, в частности, очистка или полировка, боковых поверхностей, а также поверхностей передней части и задней части автомобиля в целом при малых аппаратных расходах.
Разумеется, возможно также расположение большего количества комплектов с тремя линейными направляющими в каждом на каждой из продольных сторон и/или передних сторон транспортного средства. Таким образом, нижний комплект может очищать нижнюю часть и боковые поверхности транспортного средства, в то время как находящийся над ним комплект, расположенный сбоку от транспортного средства, может очищать дверцу багажника, капот и поверхность крыши, а также проходящие по существу в этой области поверхности окон.
Наконец, согласно следующему предпочтительному варианту осуществления настоящего изобретения предлагается, что отношение длины соединительных стержней к длине транспортного средства, подлежащего очистке, находится в пределах примерно от 1/3 до 1/2. Длина транспортного средства, подлежащего очистке, при этом соответствует протяженности транспортного средства в его направлении движения. В соответствии с этим длина транспортного средства составляет от удвоенной до утроенной длины соединительных стержней.
Компоненты моющего устройства могут быть снабжены светодиодными источниками света. В частности, возможно оснащение такими светодиодами соединительных стержней и/или промежуточного элемента и/или рычажных звеньев.
Устройство может содержать также регулировочное приспособление, позволяющее с его помощью изменять кривизну рабочей пластины, чтобы адаптировать кривизну к соответствующей кривизне очищаемой поверхности. Таким образом, рабочая пластина может быть образована из упругого материала, например, из пластмассы, и быть закрепленной лишь по краям в отдельных опорных точках или на проходящей по периметру раме. В середине рабочей пластины возможно воздействие регулирующего цилиндра, который выполнен с возможностью изменения его длины, чтобы изгибать рабочую пластину относительно ее опоры в выпуклой и/или вогнутой форме. Такой регулирующий цилиндр может быть интегрирован, например, в качестве центрального регулирующего цилиндра элемента гексапода и таким образом встроен в гексапод.
В соответствии с этим, настоящим изобретением предоставлено улучшенное моющее устройство для транспортных средств. Под транспортными средствами, рассматриваемыми в рамках настоящего изобретения, подразумеваются, в частности, автомобили, грузовые или двухколесные транспортные средства. Под мойкой, рассматриваемой в рамках настоящего изобретения, понимается любая очистка или сушка транспортного средства. При этом нанесение жидкого моющего средства не обязательно. Моющее устройство согласно изобретению может, например, также автоматически сушить транспортное средство после прохождения обычной очистки в линии для автоматической мойки и при этом вытирать его и в соответствии с этим выполнять только одну частичную операцию комплексного моющего процесса. Линия для автоматической мойки может содержать также одно или несколько устройств согласно изобретению. Линия для автоматической мойки может также содержать исключительно устройства согласно изобретению, чтобы проводить различным образом фазы очистки транспортного средства в линии для автоматической мойки, например, размягчение, намыливание, полировку, сушку или герметизацию. Альтернативой мойке с жидкостью согласно настоящему изобретению является втирание полировального средства в поверхность транспортного средства и последующая полировка. Под мойкой, рассматриваемой в рамках настоящего изобретения, понимаются все операции обработки, которые служат для улучшения внешнего вида транспортного средства.
В дальнейшем настоящее изобретение разъясняется посредством варианта осуществления в сочетании с чертежом. На нем показаны:
фигура 1 изображение в перспективе транспортного средства, подвергаемого мойке, в направлении сбоку, с вариантом осуществления дельта-робота;
фигура 2 вид сбоку автоматической мойки согласно настоящему изобретению;
фигура 3 вид сверху варианта осуществления, показанного на фигуре 2;
фигура 4 изображение в перспективе транспортного средства, подвергаемого мойке, в направлении снизу, при обработке посредством моющего устройства согласно изобретению по второму варианту осуществления;
фигура 5 изображение с фигуры 5 в другом изображение в перспективе в направлении сбоку;
фигура 6 вариант осуществления, показанный на фигурах 4 и 5, при обработке передней поверхности транспортного средства, подвергаемого мойке;
фигура 7 изображение согласно фигуре 7 для другого изображения в перспективе;
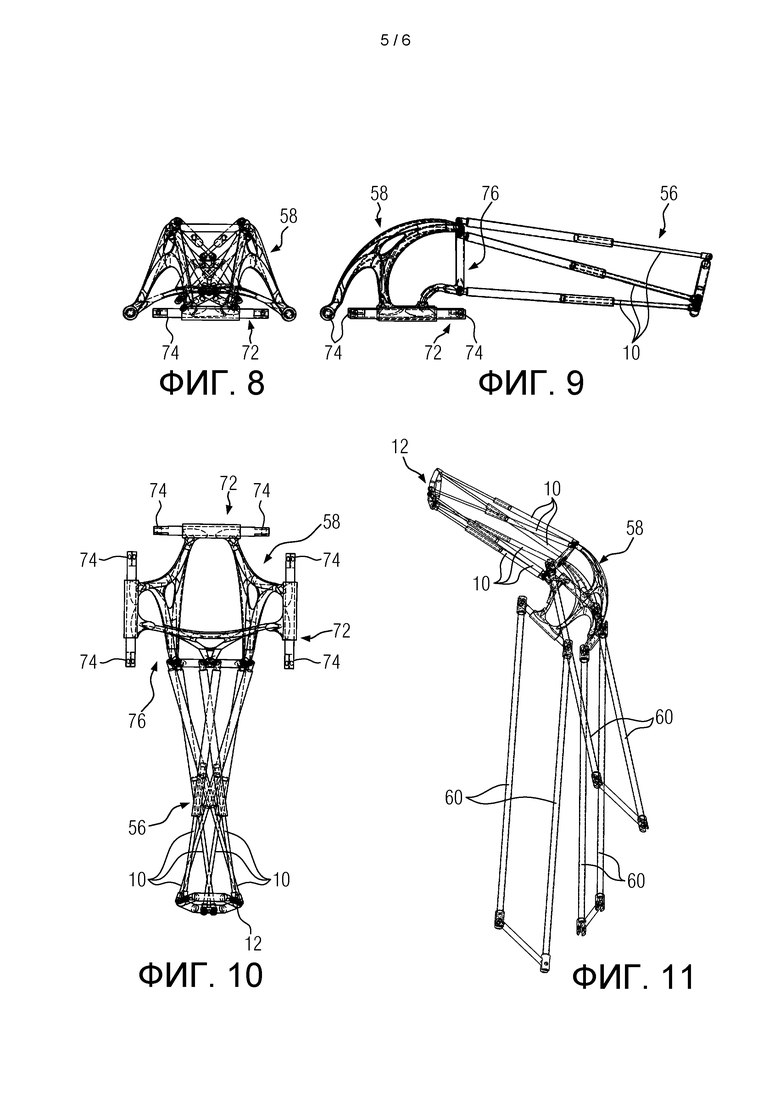
фигура 8 вид промежуточного элемента с гексаподом с торцевой стороны;
фигура 9 вид сбоку промежуточного элемента с гексаподом;
фигура 10 вид сверху промежуточного элемента с гексаподом;
фигура 11 изображение в перспективе промежуточного элемента с гексаподом, в направлении сбоку, и
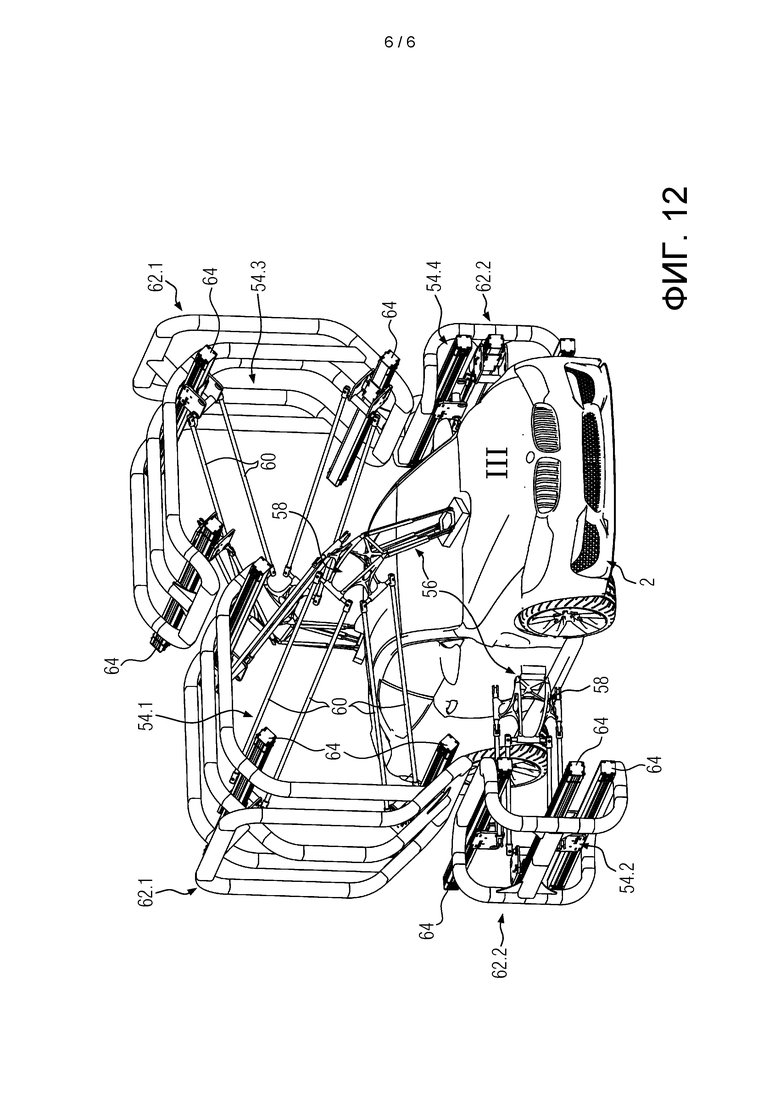
фигура 12 изображение в перспективе, аналогичное изображению согласно фигуре 6, для альтернативного варианта осуществления.
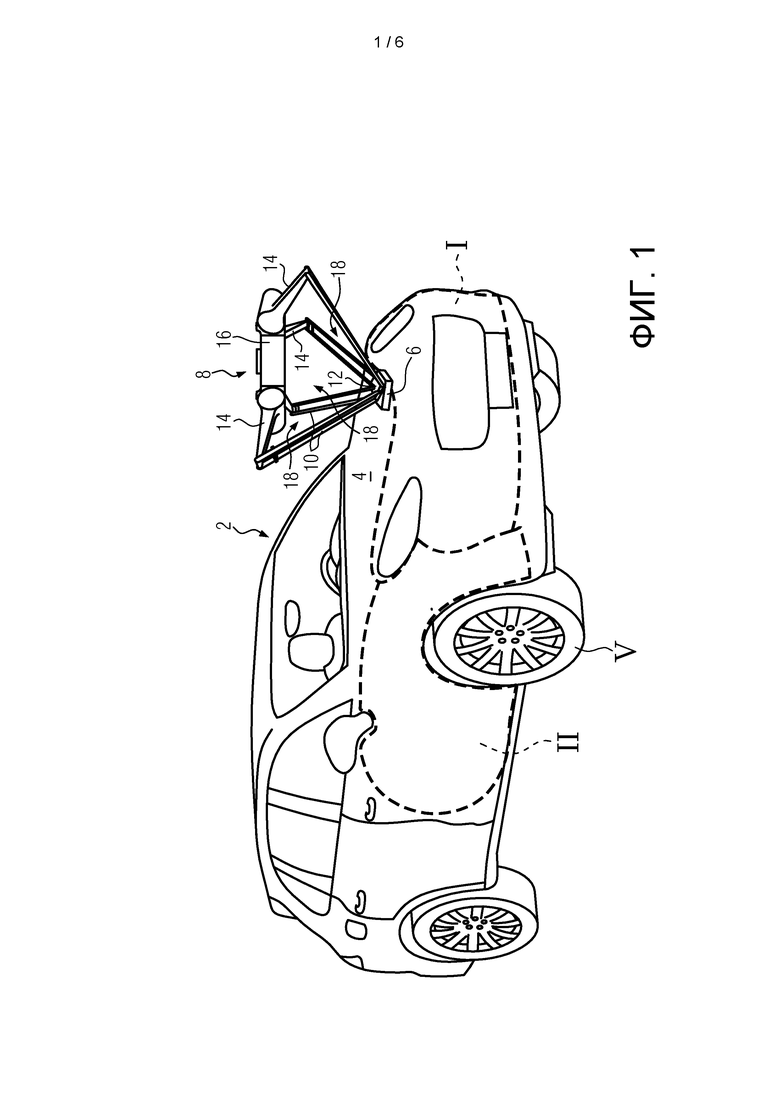
На фигуре 1 показано изображение в перспективе подвергаемого мойке транспортного средства в форме легкового автомобиля 2, с которым в области капота 4 находится в функциональном соединении очищающий элемент в форме губки 6 для очистки. Губка 6 для очистки удерживается посредством дельта-робота, отмеченного обозначением 8, и выполнена с возможностью перемещения. Для этого дельта-робот 8 имеет четыре рычажных звена 10, каждое их которых выполнено в виде двойного рычажного звена и на его конце с рабочей стороны соединено с рабочей пластиной 12, несущей губку 6 для очистки, а на противоположном конце шарнирно соединено с соответствующим приводным рычагом 14. Этот приводной рычаг 14 выполнен с возможностью поворота посредством не показанного подробно двигателя, который закреплен соответственно на основании 16. В данном случае дельта-робот 8 содержит четыре приводных рычага 14 с соответствующими рычажными звеньями 10. Таким образом, рычажными звеньями 10 образованы различные параллелограммы, которые отмечены обозначением 18.
При помощи привода приводных рычагов 14 возможен поворот рабочей пластины 12 относительно ее горизонтального направления, чтобы губка 6 для очистки максимально плоскопараллельно прилегала к поверхности легкового автомобиля 2. Кроме того, возможно перемещение губки 6 для очистки относительно капота 4 с помощью привода приводных рычагов 14.
На фигуре 1 обозначены различные области легкового автомобиля 2, которые требуют очистки разной степени интенсивности. Цифрой I обозначена фронтальная область, которая включает в себя, помимо прочего, радиатор и фарные лампы, и которая при быстрой езде подвергается загрязнениям, в частности, в виде насекомых и ударов камней. Высокая скорость, с которой загрязнение попадает на фронтальную область I, обуславливает интенсивность и устойчивость загрязнений на поверхности легкового автомобиля 2.
Область крыльев и передняя область дверей обозначены цифрой II. Эта боковая передняя область II испытывает меньше загрязнений, чем фронтальная область I. Верхняя область капота, следующая за фронтальной областью I в направлении движения, обозначена цифрой III. Все поверхности окон образуют область IV.
Изобретение в его конкретном варианте осуществления исходит из представления о том, что чистка каждой из областей I-IV должна осуществляться в соответствии со свойствами материала их поверхности или со степенью их загрязнения. Так, фронтальную области I подвергают действию значительно большего прижимного усилия и более высокой интенсивности, которая выражается в высокой относительной скорости и в высоком прижимном усилии губки 6 для очистки по отношению к поверхности легкового автомобиля 2 и/или в колебательных движениях с высокой частотой.
Напротив, для чистки боковой передней области II требуются более умеренные усилия. Возможна чистка областей I и II, а также области III капота, с использованием одной и той же губки 6 для очистки, при этом обработка области III капота требует еще меньшей интенсивности очистки.
Для чистки области поверхностей IV окон используется очищающий элемент, оптимально приспособленный для очистки стекла. То же относится и к области колес, которая обозначена цифрой V и включает в себя диски, а также частично шины.
Подразумевается, что возможна очистка легкового автомобиля 2 посредством только одного дельта-робота 8. Для этого он выполнен с возможностью перемещения относительно легкового автомобиля 2, а именно предпочтительно в направлениях, соответствующим высоте, ширине и длине транспортного средства.
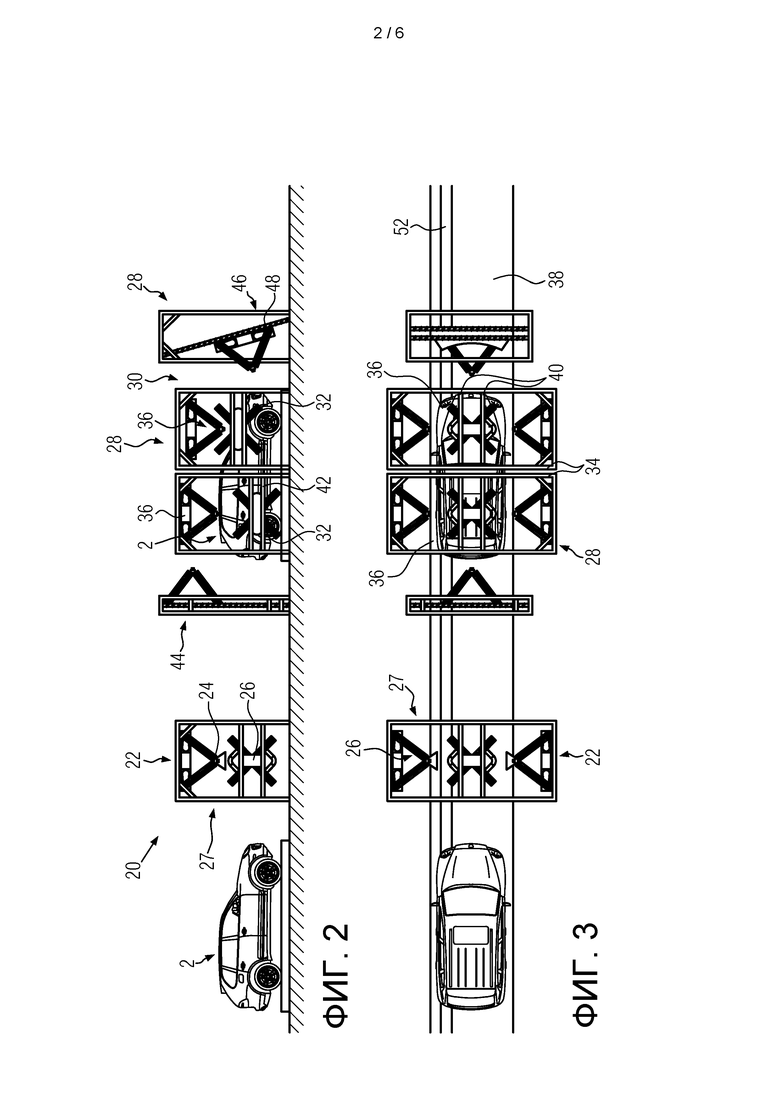
На фигурах 2 и 3 показан вариант осуществления линии 20 для автоматической мойки. Линия 20 для автоматической мойки снабжена устройством 22 распознавания, имеющим верхнюю камеру 24 и боковые камеры 26, которые посредством устройства 22 распознавания оптически измеряют или, соответственно, распознают проезжающее транспортное средство 2. Это позволяет распознать и проанализировать все поверхности. Подвижность этих камер 24, 26 обеспечивается дельта-роботом 27 устройства 22 распознавания, что обеспечивает максимально возможное разнообразие проекций на транспортное средство 2. Полученные при этом данные обрабатываются в не показанном управляющем устройств с целью выбора или создания программы очистки, адаптированной к конструкции легкового автомобиля 2. Программа очистки может содержать данные, воспроизводящие внешнее оформление легкового автомобиля 2, которые после распознавания модели и ее поколения считываются для соответствующей модели и передаются моющему устройству, отмеченному обозначением 26, для создания индивидуальной программы очистки для соответствующего транспортного средства. Данное моющее устройство имеет двух боковых дельта-роботов 32, по обе стороны легкового автомобиля 2, каждый из которых выполнен с возможностью перемещения по высоте на каркасе 30. Транспортное средство 2, подвергаемое мойке, размещается между расположенными по бокам друг напротив друга боковыми дельта-роботами 32. Таким образом, боковые дельта-роботы 32 "видят" крыло, колеса, двери и боковые поверхности задней части, а также боковую часть окон легкового автомобиля 2. Каркас 30 имеет горизонтально расположенные поперечины 34, несущие двух верхних дельта-роботов 36, которые находятся над местом 38 установки транспортного средства 2, что дает возможность чистить крышу транспортного средства 2. Каждая из поперечин 34 несет на себе продольную направляющую 40, которая, в свою очередь, подвижно присоединена к поперечине 34, чтобы перемещать верхних дельта-роботов посредством их основания 16 в горизонтальной плоскости относительно крыши транспортного средства. Очевидно, что боковые дельта-роботы 32 также выполнены с возможностью перемещения не только по высоте, но и, с помощью поперечных балок 42, подвижно закрепленных на каркасе 30, соответственно вертикально и горизонтально.
Предусмотрены также передние и задние каркасы 44, 46, расположенные по обе стороны места 38 установки. На заднем по направлению движения транспортного средства 2 каркасе 46 расположен передний дельта-робот 48. На переднем по направлению движения транспортного средства 2 каркасе 44 расположен задний дельта-робот 50. На каркасах 44, 46 закреплены с возможностью перемещения в вертикальном и в поперечном направлениях дельта-роботы 48, 50, обеспечивающие возможность чистки передней части или задней части кузова легкового автомобиля 2.
Обозначением 52 отмечено выполненное обычным способом устройство для перемещения транспортного средства по линии 20 для автоматической мойки.
Сначала транспортное средство 2, мойка которого выполняется, проходит через устройство 22 распознавания. При этом камеры 24, 26 перемещаются посредством присоединенных дельта-роботов таким образом, чтобы по возможности обеспечить съемку всех деталей легкового автомобиля 2. Полученные при этом оптические данные обрабатываются процессором управляющего устройства. Этот процессор управляет также движением разных дельта-роботов 32, 36, 48, 50 моющего устройства 28. При этом очищающие элементы 6, предусмотренные в соответствующих роботах 32, 36, 48, 50, не просто перемещаются параллельно очищаемой поверхности в соответствии с заданным образцом движения. Напротив, при этом в соответствии со степенью загрязнения регулируется интенсивность очистки.
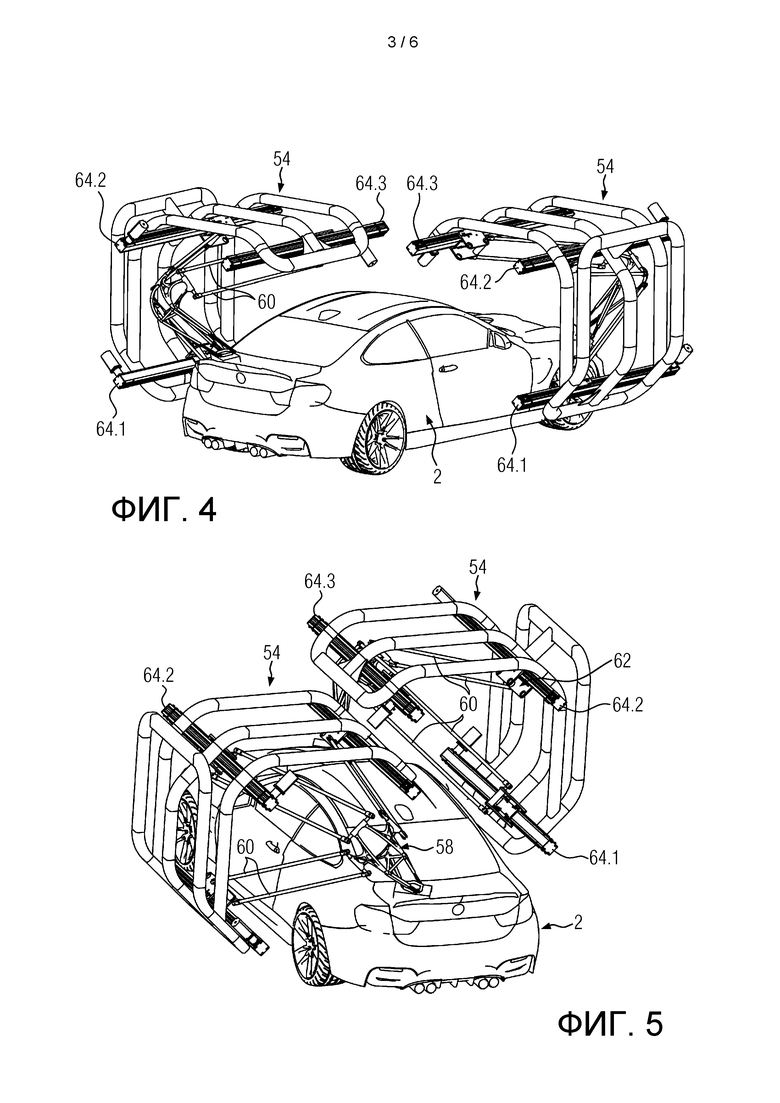
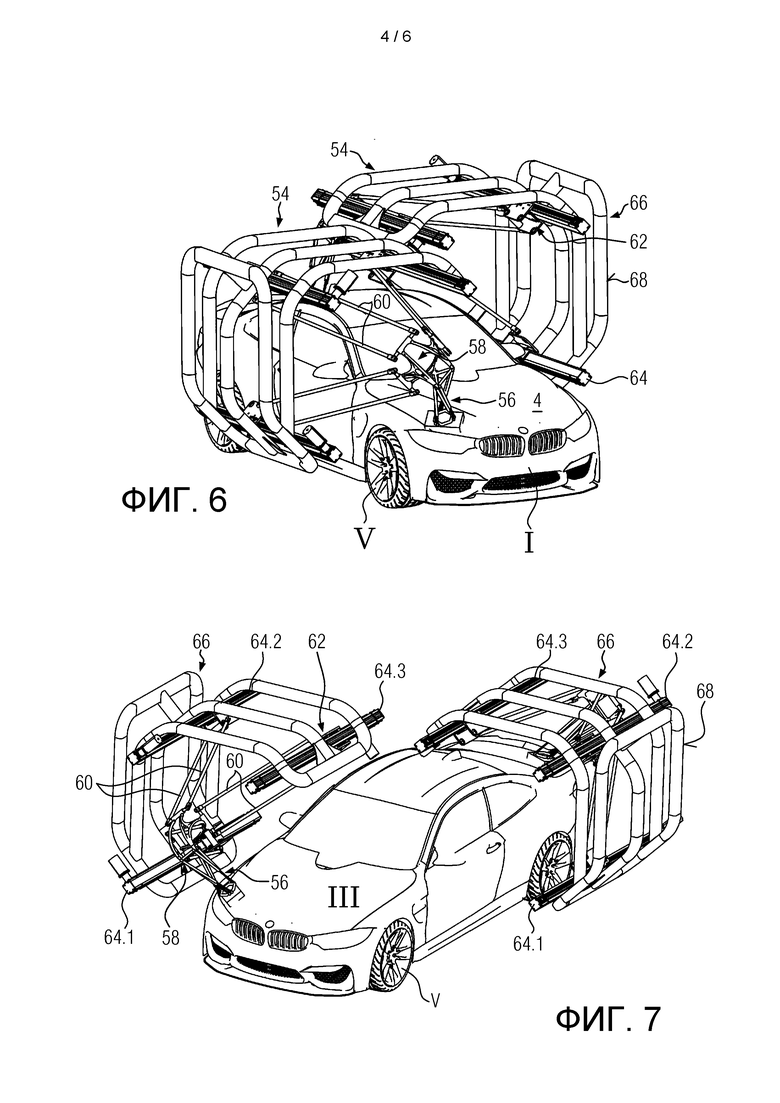
На фигурах 4-7 показаны виды сбоку второго варианта осуществления моющего устройства согласно изобретению. По отношению к первому варианту осуществления на фигурах 1-3 одинаковые элементы отмечены одинаковыми обозначениями.
В варианте осуществления, показанном на фигурах 4-7, имеются две идентично выполненных подгруппы 54, каждая из которых имеет одного дельта-робота 56, который выполнен в виде гексапода и содержит на конце рабочей стороны, как и в первом варианте осуществления, губку для очистки, причем гексапод 56 своими шестью рычажными звеньями 10, выполненными с возможностью изменения длины, опирается на консольную конструкцию 58, образованную из множества соединительных стержней и образующую промежуточный элемент.Консольная конструкция 58 более подробно разъясняется ниже со ссылкой на фигуры 8-10.
Консольная конструкция 58 посредством соединительного стержня 60 шарнирно соединена с держателем 62. Держатель 62 опирается на каркас 66 посредством линейной направляющей 64 с возможностью линейного перемещения. Соединительные стержни 60 предусмотрены парами. Объединенные в пару соединительные стержни проходят параллельно друг другу и шарнирно закреплены на одинаковом расстоянии, с одной стороны на держателе 62, а с другой стороны на промежуточном элементе 58. Соединение и с держателем 62, и с промежуточным элементом 58 осуществляется посредством шаровых шарниров. Каркас 66 имеет поверхность 68 прилегания, приспособленную для упора в стену здания не показанной здесь линии для автоматической мойки. Каркас 66 изготовлен из сваренных друг с другом балок 70.
Каркас 66 удерживает нижнюю линейную направляющую, предусмотренную на высоте колес легкового автомобиля 2 и отмеченную обозначением 64.1. Вертикально над ней на каркасе 68 расположена внешняя линейная направляющая 64.2. Примерно на той же высоте, что и эта внешняя линейная направляющая 64.2, предусмотрена верхняя линейная направляющая 64.3, расположенная над транспортным средством и поддерживаемая каркасом 68. На каждой из линейных направляющих 64.1, 64.2, 64.3 помещен с возможностью перемещения один из держателей 62. Благодаря относительному расположению соответствующих держателей 62 возможно перемещение консольной конструкции 58 не только в продольном направлении относительно легкового автомобиля 2. Передвижение держателей 62 подгруппы 54 относительно друг друга также позволяет изменять угловое направление положения консольной конструкции 58 относительно легкового автомобиля 2. Таким образом, возможно определенное задание положения гексапода 56. Кроме того, он может располагать губку 6 для очистки относительно очищаемой поверхности легкового автомобиля 2 и перемещать ее.
Как показано, в частности, на фигуре 4, обе подгруппы 54 предусмотрены со смещением по отношению друг к другу в продольном направлении транспортного средства, т.е. в направлении движения. Они расположены таким образом, что подгруппа 54, находящаяся немного дальше сзади может чистить заднюю область VI, но не фронтальную область I легкового автомобиля 2, в то время как передняя подгруппа 54 с рабочей пластиной 12 и предусмотренной на ней губкой 6 для очистки может доставать до поверхностей передней части транспортного средства, но не задней области VI и заднего бампера.
Каждый каркас 66 может независимо двигаться по горизонтальным рельсам, которые проходят в продольном направлении транспортного средства. Они предпочтительно опираются на ролики или на колеса. Каркасы 66 могут также перемещаться посредством привода, чтобы, например, следовать за перемещением транспортного средства 4, подлежащего очистке. При этом описанное выше смещение подгрупп 54 с двух сторон повышает эффективность очистки с использованием всего двух подгрупп 54.
На фигурах 8-10 показаны элементы консольной конструкции 58.
Как уже упоминалось ранее, консольная конструкция 58 служит для присоединения соединительных стержней 60. Для этого консольная конструкция 58 содержит три проходящих сквозь нее тела 72 осей, на каждый из свободных концов 74 которых шарнирно оперты попарно предусмотренные соединительные стержни 60. Эти свободные концы 74 не обязательно должны быть образованы цельным телом 72 оси. Однако свободные концы 74 лежат соответственно в одной плоскости с ее продольной осью или параллельны этой плоскости. Как показано на фигуре 8, тела 62 осей в данном случае расположены в единственной плоскости.
Однако достаточно такого расположения тел 72 оси или, соответственно, свободных концов 74, при котором они параллельными плоскости, видимой на фигуре 8. Нет необходимости располагать их в одной и той же плоскости. Консольная конструкция 58 образует основание 76 крепления для крепления гексапода 56. Точки соединения, которые образуются этим основанием 76 крепления для гексапода 56, лежат в к плоскости, расположенной под прямым углом к плоскости свободных концов 74 (ср. фигуры 9, 10). С основанием крепления, которое обычно выполнено в форме шестиугольника, сцепляются концы рычажных звеньев 10 со стороны крепления, которые выполнены в виде цилиндров с изменяемой длиной. На другом их конце изображена рабочая пластина 12.
Консольная конструкция 58 выполнена, как правило, в виде облегченной детали. Таким образом, тела 72 осей могут быть выполнены из металла и - как, в частности, видно на фигуре 10 - по окружности иметь отделку из карбона, образуя плотное соединение между телом 72 оси и карбоном. Положение 76 крепления под углом, предпочтительно под прямым углом, по отношению к плоскости, образованной свободными концами 74, для связи соединительных стержней 60, позволяет лучше располагать рабочую пластину 12 по отношению к очищаемой поверхности транспортного средства.
На фигуре 12 показан измененный вариант осуществления, согласно которому моющее устройство снабжено четырьмя узлами 54.1-54.4, каждое из которых установлено на отдельном держателе 62.1 или 62.2 и закреплено на стене. Как описано выше, крепление на стене также может быть выполнено с возможностью перемещения. Нижние узлы 54.2 и 54.4 служат для чистки нижних областей транспортного средства, тогда как верхние узлы 54.1 и 54.3 чистят верхнюю область транспортного средства. Для каждой продольной стороны транспортного средства 2 предусмотрены по две подгруппы 54.1, 54.2 или 54.3, 54.4. В соответствии с этим используются четыре различные рабочие пластины с соответствующими очищающими элементами.
Список обозначений
2 легковой автомобиль
4 капот
6 губка для очистки
8 дельта-робот
10 рычажные звенья
12 рабочая пластина
14 приводной рычаг
16 основание
18 параллелограмм
20 линия автоматической мойки
22 устройство распознавания
24 верхняя камера
26 боковая камера
27 каркас
28 моющая установка
30 каркас
32 боковой дельта-робот
34 поперечина
36 верхний дельта-робот
38 место установки
40 продольная направляющая n
42 поперечная балка
44 передний каркас
46 задний каркас
48 передний дельта-робот
50 задний дельта-робот
52 устройство для перемещения
54 подгруппа
56 гексапод
58 консольная конструкция / промежуточный элемент
60 соединительный стержень
62 держатель
64 линейная направляющая и
66 каркас
68 поверхность прилегания
70 носитель
72 тело оси
74 свободные концы
76 основание крепления
I фронтальная область
II передняя боковая область
III область капота
IV область окон
V область колес
VI задняя область
| название | год | авторы | номер документа |
|---|---|---|---|
| МАЛООБЪЕМНЫЙ МОЕЧНЫЙ АППАРАТ | 2008 |
|
RU2381924C1 |
| Устройство для внутритрубной роботизированной механической очистки поверхности трубопроводов | 2024 |
|
RU2837919C1 |
| Моечная машина для очистки деталей | 1976 |
|
SU659211A1 |
| Робот-автомойщик | 2017 |
|
RU2736792C1 |
| ЭЛЛИПСООБРАЗНОЕ КОЛЕСО ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2011549C1 |
| СПОСОБ СЛИВА И НАЛИВА РЕЗЕРВУАРОВ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2024 |
|
RU2834081C1 |
| Автономный мобильный модуль роботизированного хирургического инструмента | 2019 |
|
RU2715684C1 |
| СЛОИСТАЯ ВИБРОШУМОДЕМПФИРОВАННАЯ ПАНЕЛЬ КАБИНЫ ВОДИТЕЛЯ И/ИЛИ ПАССАЖИРСКОГО ПОМЕЩЕНИЯ КУЗОВА ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2449904C1 |
| ВОДОПРОВОДЯЩИЙ БЫТОВОЙ ПРОБОР, В ЧАСТНОСТИ ПОСУДОМОЕЧНАЯ ИЛИ СТИРАЛЬНАЯ МАШИНА | 2009 |
|
RU2516800C2 |
| ДОИЛЬНЫЙ РОБОТ И СИСТЕМА ДОЕНИЯ | 2011 |
|
RU2566704C2 |
Изобретение относится к моющему устройству для транспортных средств. Моющее устройство содержит дельта-робота (8, 32, 36, 48, 50), который на конце своей рабочей стороны несет обрабатывающий элемент (6). Достигается улучшение устройства для мойки транспортных средств. 13 з.п. ф-лы, 12 ил.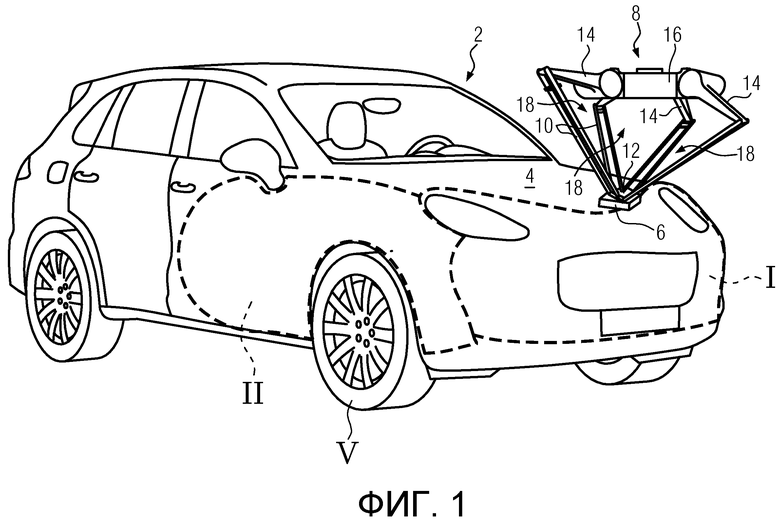
1. Моющее устройство для транспортных средств (2), имеющее по меньшей мере одного дельта-робота (8, 32, 36, 48, 50), который на конце своей рабочей стороны несет обрабатывающий элемент (6), причем дельта-робот (56) соединен с линейной направляющей (64).
2. Моющее устройство по п. 1, отличающееся тем, что обрабатывающий элемент (6) выполнен в виде очищающего элемента для непосредственного контакта с поверхностью транспортного средства (2), и/или в виде опрыскивающего элемента для набрызгивания вещества для очистки или соответственно для ухода, и/или в виде высушивающего элемента для сушки транспортного средства (2).
3. Моющее устройство по п. 1 или 2, отличающееся тем, что дельта-робот (8, 32, 36, 48, 50) выполнен с возможностью управления посредством управляющего устройства, которое обрабатывает данные для отображения контура транспортного средства (2), подлежащего очистке, для позиционирования обрабатывающего элемента (6) и данные об интенсивности очистки, которое в зависимости от интенсивности очистки, варьирующей по поверхности транспортного средства (2), адаптирует по меньшей мере один из следующих параметров: давление воздействия обрабатывающего элемента (6) на очищаемую поверхность транспортного средства (2); скорость воздействия обрабатывающего элемента (6) на очищаемую поверхность транспортного средства (2); продолжительность воздействия на заданном участке поверхности транспортного средства (2); форма перемещения при воздействии обрабатывающего элемента (6) на заданном участке поверхности транспортного средства (2).
4. Моющее устройство по одному из предшествующих пунктов, отличающееся тем, что дельта-робот (8, 32, 36, 48, 50) выполнен с возможностью управления управляющим устройством в зависимости от погодных данных и/или от сезонных данных и/или в зависимости от индивидуальной предварительной настройки, заданной для определенного владельца транспортного средства.
5. Моющее устройство по одному из предшествующих пунктов, отличающееся магазином обрабатывающих элементов, к которому дельта-робот (8, 32, 36, 48, 50) имеет доступ для автоматизированной замены обрабатывающего элемента (6) и в котором содержатся обрабатывающие элементы (6) с разными профилями.
6. Моющее устройство по одному из предшествующих пунктов, отличающееся устройством обработки обрабатывающих элементов для восстановления использованных обрабатывающих элементов (6).
7. Моющее устройство по п. 6, отличающееся тем, что устройство обработки обрабатывающих элементов содержит проходящий по периметру участок обработки, на котором обеспечена возможность очистки и/или проверки обрабатывающих элементов (6), и/или их снабжения чистящими и/или полирующими средствами, и/или замены, и/или сушки.
8. Моющее устройство по одному из предшествующих пунктов, отличающееся тем, что моющее устройство выполнено в виде автоматической мойки (20) с перемещающим устройством (52) для перемещения транспортного средства (2) и передним, в направлении движения перемещающего устройства (52), устройством (22) распознавания и расположенной за ним в направлении движения перемещающего устройства (52) моющей установкой (28), содержащей по меньшей мере одного дельта-робота (32, 36, 48, 50), причем устройство (22) распознавания имеет средство (24, 26) распознавания для распознавания перемещаемого транспортного средства (2), и управляющее устройство, управляющее дельта-роботом (32, 36, 48, 50) на основе полученных при этом сведений о положении, типе и/или оснащении транспортного средства (2) для задачи программы очистки для транспортного средства (2).
9. Моющее устройство по одному из предшествующих пунктов, отличающееся тем, что моющее устройство содержит моющую установку (28) с множеством дельта-роботов (32, 36, 48, 50), которые расположены по существу вертикально и напротив друг друга, чтобы принимать подвергаемое мойке транспортное средство (2) между ними, и/или расположены над местом (38) установки транспортного средства (2), чтобы очищать крышу транспортного средства (2), и/или расположены напротив друг друга над местом (38) установки, чтобы принимать между ними переднюю часть или заднюю часть кузова транспортного средства (2).
10. Моющее устройство по п. 1, отличающееся тем, что между держателем (62) и концом рабочей стороны расположен промежуточный элемент (58), к которому шарнирно присоединены соединительные стержни (60) и рычажные звенья (10), причем соединительные стержни (60) проходят между держателем (62) и промежуточным элементом (58), причем рычажные звенья (10) проходят между держателем (62) и рабочей пластиной (12), к которой присоединен обрабатывающий элемент (6).
11. Моющее устройство по п. 10, отличающееся тем, что для каждого промежуточного элемента (58) предусмотрены по меньшей мере три линейных направляющих (64.1, 64.2, 64.3).
12. Моющее устройство по одному из пп. 10, 11, отличающееся тем, что предусмотрены два комплекта, каждый из которых содержит по меньшей мере три линейных направляющих (64), причем комплекты относятся к разным продольным сторонам транспортного средства (2), подлежащего очистке.
13. Моющее устройство по одному из предшествующих пунктов, отличающееся тем, что по меньшей мере одно рычажное звено (10) и/или по меньшей мере один соединительный стержень (60) и/или промежуточный элемент (58) снабжены светодиодами.
14. Моющее устройство по п. 12 или 13, отличающееся тем, что линейные направляющие (64.1, 64.2, 64.3) комплекта закреплены на каркасе (66), который выполнен с возможностью перемещения в продольном направлении транспортного средства.
| CN 105752045 A, 13.07.2016 | |||
| DE 102015220357 A1, 20.04.2017 | |||
| EP 3015179 A1, 04.05.2016 | |||
| DE 102014112123 A1, 25.02.2016 | |||
| Способ формования минеральных штапельных волокон | 1960 |
|
SU139971A1 |

