Изобретение относится к системам наведения ракет и торпед, а именно к оборонительно-наступательным системам, и может быть использовано для уничтожения подводных целей ракетами с торпедной боевой частью.
Известен способ уничтожения подводной цели (RU 2513366), в котором на станции управления запускают ракету-носитель; на ракете-носителе определяют ее текущие координаты и передают их на станцию управления; рассчитывают траекторию для ракеты-носителя; на станции управления формируют команды наведения ракеты-носителя по расчетной траектории на область нахождения цели и передают их на ракету-носитель; на станции управления формируют команду отделения торпедной боевой части (ТБЧ) от ракеты-носителя в конце расчетной траектории и передают ее на ракету-носитель; определяют текущие координаты ТБЧ; на станции управления рассчитывают траекторию для ТБЧ; формируют команды наведения ТБЧ по расчетной траектории.
Наиболее близким к предлагаемому является способ уничтожения подводной цели (RU 2535958), в котором на станции управления запускают ракету-носитель; на ракете-носителе и ракетах с радиогидроакустическими (РГА) буями определяют их текущие координаты и скорости; рассчитывают траектории и скорости для ракеты-носителя и ракет с РГА буями; формируют команды наведения ракеты-носителя и ракет с РГА буями по расчетным траекториям с расчетными скоростями на область нахождения цели; формируют команды отделения РГА буев от ракет в конце расчетных траекторий; на РГА буях, после приводнения, определяют их текущие координаты; на РГА буях обнаруживают цель и определяют ее текущие координаты; определяют точные текущие координаты цели; корректируют расчет траектории и скорости для ракеты-носителя; формируют команду отделения ТБЧ от ракеты-носителя в конце расчетной траектории.
Однако, такие способы не обеспечивают: - предотвращение столкновения ракет со сторонними объектами и обход ракетами зон действия противоракетной обороны противника, поскольку не учитывают информацию о таких объектах и зонах; - высокую надежность обнаружения и сопровождения цели и высокую точность определения ее координат на ТБЧ, поскольку не предусматривают обзор цели с различных направлений; - защиту наведения ТБЧ от противодействия со стороны цели, направленного на головку самонаведения ТБЧ.
Указанные недостатки известных способов снижают вероятность уничтожения цели.
Цель изобретения - повышение вероятности уничтожения подводной цели ракетой с ТБЧ.
Предложенный способ заключается в том, что:
- в оборонительно-наступательной системе (ОНС) обнаруживают и сопровождают ракету, запущенную из-под воды, и определяют координаты места запуска ракеты, характеристики ракеты и цели, запустившей ракету, и размеры области нахождения цели;
- в ОНС назначают ракету-носитель для доставки ТБЧ и ракет с РГА буями к области нахождения цели и передают их данные на соответствующую станцию управления;
- на станции управления запускают ракету-носитель;
- на ракете-носителе и ракетах с РГА буями определяют их текущие координаты и скорости и передают их, через станцию управления, в ОНС;
- в ОНС рассчитывают траектории и скорости для ракеты-носителя и ракет с РГА буями и передают их на станцию управления;
- на станции управления формируют команды отделения ракет с РГА буями от ракеты-носителя в начале расчетных траекторий и передают их на ракету-носитель;
- на станции управления формируют команды наведения ракеты-носителя и ракет с РГА буями по расчетным траекториям с расчетными скоростями на область нахождения цели и передают их на ракету-носитель и ракеты с РГА буями;
- на станции управления формируют команды отделения РГА буев от ракет в конце расчетных траекторий и передают их на ракеты с РГА буями;
- на РГА буях, после приводнения, определяют их текущие координаты;
- на РГА буях обнаруживают цель, определяют ее текущие координаты и скорость и передают их на станцию управления;
- на станции управления определяют точные текущие координаты и скорость цели и передают их в ОНС;
- в ОНС корректируют расчет траектории и скорости для ракеты-носителя;
- на станции управления формируют команду отделения ТБЧ от ракеты-носителя в конце расчетной траектории и передают ее на ракету-носитель;
- на ТБЧ, после приводнения, определяют ее текущие координаты и скорость и передают их на станцию управления;
- на станции управления рассчитывают траекторию и скорость для ТБЧ;
- на станции управления формируют команды наведения ТБЧ по расчетной траектории с расчетной скоростью на цель и передают их на ТБЧ.
В ОНС реализуют известный способ (RU 2753498). Характеристики ракеты определяют в результате ее сопровождения, и по ним определяют характеристики цели. Размеры области нахождения цели определяют, исходя из максимальной скорости движения цели и максимального времени, необходимого для ее уничтожения после обнаружения запуска ракеты.
Ракету-носитель, ТБЧ и ракеты с РГА буями назначают, исходя из их эффективности. На ракете-носителе, ТБЧ и ракеты с РГА буями, их координаты и скорости определяют с помощью бортовых инерциальных систем навигации, корректируемых с помощью глобальной спутниковой системы. На РГА буях, их координаты определяют с помощью глобальной спутниковой системы навигации.
Траектории и скорости для ракеты-носителя и ракет с РГА буями рассчитывают, исходя из необходимости предотвращения их столкновения со сторонними объектами и необходимости обхода ракетой-носителем зон действия противоракетной обороны противника. Количество РГА буев и места их приводнения определяют, исходя из необходимости покрытия зонами действия РГА буев области нахождения цели таким образом, чтобы в процессе движения цель всегда находилась в зоне действия нескольких РГА буев - для ее обзора с различных направлений.
Связь между ТБЧ и станцией управления, а также контроль точности наведения ТБЧ осуществляют известными способами (RU 2730749). Благодаря точному определению координат и скорости цели, головка самонаведения на ТБЧ не требуется.
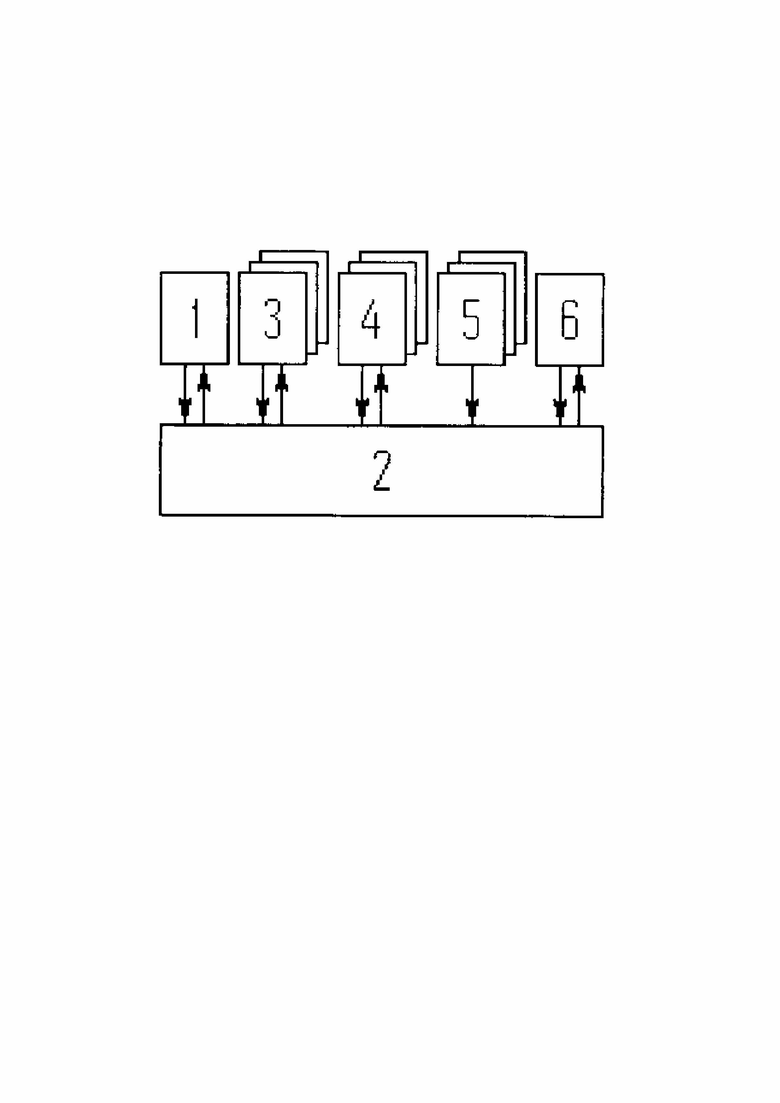
Предложенный способ может быть реализован в системе, блок-схема которой приведена на чертеже.
Блоки: 1 - ОНС; 2 - станция управления; 3 - ракета-носитель; 4 - ракеты с РГА буями, отделенные от ракеты-носителя; 5 - РГА буи, отделенные от ракет; 6 - ТБЧ, отделенная от ракеты-носителя.
Связи между блоками: 1-2 -данные ракеты-носителя, ТБЧ и ракет с РГА буями, а также расчетные траектории и скорости для ракеты-носителя и ракет с РГА буями; 2-1 - текущие координаты и скорости ракеты-носителя и ракет с РГА буями, а также точные текущие координаты и скорость цели; 2-3 - команды отделения ракет с РГА буями от ракеты-носителя в начале расчетных траекторий, команды наведения ракеты-носителя по расчетной траектории с расчетной скоростью на область нахождения цели, а также команда отделения ТБЧ от ракеты-носителя в конце расчетной траектории; 2-4 - команды наведения ракет с РГА буями по расчетным траекториям с расчетными скоростями на область нахождения цели, а также команды отделения РГА буев от ракет в конце расчетных траекторий; 2-6 - команды наведения ТБЧ по расчетной траектории с расчетной скоростью на цель; 3-2 - текущие координаты и скорости ракеты-носителя и ракет с РГА буями; 4-2 - текущие координаты и скорости ракет с РГА буями; 5-2 - текущие координаты и скорость цели; 6-2 - текущие координаты и скорость ТБЧ.
Изобретение относится к системам наведения ракет и торпед. В оборонительно-наступательной системе (ОНС) обнаруживают и сопровождают ракету, запущенную из-под воды, определяют координаты места ее запуска, характеристики ракеты и цели, запустившей ракету, и область нахождения цели, а также назначают ракету-носитель (РН) с торпедной боевой частью (ТБЧ) и ракетами с радиогидроакустическими (РГА) буями и передают их данные на станцию управления (СУ), где запускают РН. На РН и ракетах с РГА буями определяют их координаты и скорости и передают их через СУ в ОНС, где рассчитывают траектории и скорости для РН и ракет с РГА буями и передают их на СУ, где формируют команды отделения ракет с РГА буями от РН и передают их на РН. На СУ формируют команды наведения РН и ракет с РГА буями на область нахождения цели и передают их на РН и ракеты с РГА буями, а также формируют команды отделения РГА буев от ракет и передают их на ракеты с РГА буями. На РГА буях после приводнения определяют их координаты, а также обнаруживают цель, определяют ее координаты и скорость и передают их на СУ, где определяют точные координаты и скорость цели и передают их в ОНС, где корректируют расчет траектории и скорости для РН. На СУ формируют команду отделения ТБЧ от РН и передают ее на РН. На ТБЧ после приводнения определяют ее координаты и скорость и передают их на СУ, где рассчитывают траекторию и скорость для ТБЧ. На СУ формируют команды наведения ТБЧ на цель и передают их на ТБЧ. Повышается вероятность уничтожения подводной цели ракетой с ТБЧ. 1 ил.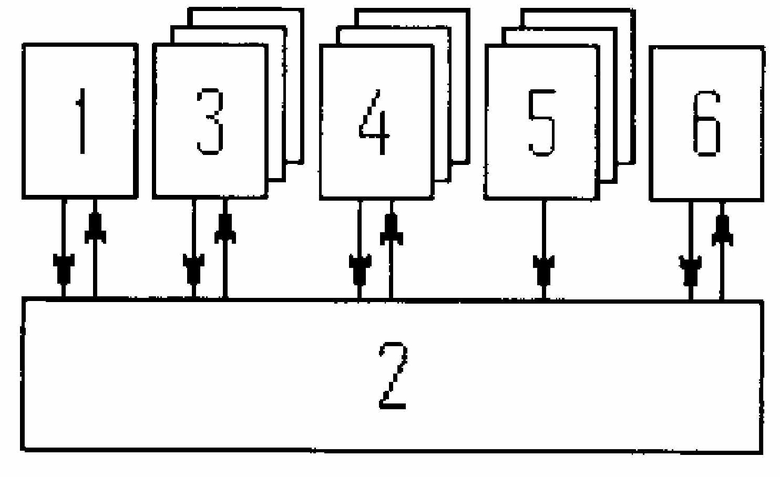
Способ уничтожения подводной цели, запустившей ракету, заключающийся в том, что на станции управления запускают ракету-носитель; на ракете-носителе и ракетах с радиогидроакустическими (РГА) буями определяют их текущие координаты и скорости; рассчитывают траектории и скорости для ракеты-носителя и ракет с РГА буями; формируют команды наведения ракеты-носителя и ракет с РГА буями по расчетным траекториям с расчетными скоростями на область нахождения цели; формируют команды отделения РГА буев от ракет в конце расчетных траекторий; на РГА буях, после приводнения, определяют их текущие координаты; на РГА буях обнаруживают цель и определяют ее текущие координаты; определяют точные текущие координаты цели; корректируют расчет траектории и скорости для ракеты-носителя; формируют команду отделения торпедной боевой части (ТБЧ) от ракеты-носителя в конце расчетной траектории; отличающийся тем, что в оборонительно-наступательной системе (ОНС) обнаруживают и сопровождают ракету, запущенную из-под воды, и определяют координаты места запуска ракеты, характеристики ракеты и цели, запустившей ракету, и размеры области нахождения цели; в ОНС назначают ракету-носитель для доставки ТБЧ и ракет с РГА буями к области нахождения цели и передают их данные на станцию управления; текущие координаты и скорости ракеты-носителя и ракет с РГА буями передают, через станцию управления, в ОНС; траектории и скорости для ракеты-носителя и ракет с РГА буями рассчитывают в ОНС и передают их на станцию управления; на станции управления формируют команды отделения ракет с РГА буями от ракеты-носителя в начале расчетных траекторий и передают их на ракету-носитель; команды наведения ракеты-носителя и ракет с РГА буями по расчетным траекториям с расчетными скоростями на область нахождения цели формируют на станции управления и передают их на ракету-носитель и ракеты с РГА буями; команды отделения РГА буев от ракет в конце расчетных траекторий формируют на станции управления и передают их на ракеты с РГА буями; на РГА буях, после приводнения, определяют также текущую скорость цели и передают ее вместе с текущими координатами цели на станцию управления; точные текущие координаты цели, а также ее точную текущую скорость определяют на станции управления и передают их в ОНС; расчет траектории и скорости для ракеты-носителя корректируют в ОНС; команду отделения ТБЧ от ракеты-носителя в конце расчетной траектории формируют на станции управления и передают ее на ракету-носитель; на ТБЧ, после приводнения, определяют ее текущие координаты и скорость и передают их на станцию управления; на станции управления рассчитывают траекторию и скорость для ТБЧ; на станции управления формируют команды наведения ТБЧ по расчетной траектории с расчетной скоростью на цель и передают их на ТБЧ.
| СПОСОБ ПОРАЖЕНИЯ ПОДВОДНЫХ ЦЕЛЕЙ | 2013 |
|
RU2535958C1 |
| СПОСОБ ПОРАЖЕНИЯ НАДВОДНОГО КОРАБЛЯ УНИВЕРСАЛЬНОЙ КРЫЛАТОЙ РАКЕТОЙ С ТОРПЕДНОЙ БОЕВОЙ ЧАСТЬЮ | 2008 |
|
RU2382326C2 |
| СПОСОБ ПОРАЖЕНИЯ ПОДВОДНОЙ ЛОДКИ | 2018 |
|
RU2711409C2 |
| СПОСОБ ПОРАЖЕНИЯ МОРСКОЙ ЦЕЛИ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2019 |
|
RU2730749C1 |
| СПОСОБ СТАБИЛИЗАЦИИ СТРУКТУРНО НЕУСТОЙЧИВЫХ ОСЦИЛЛЯТОРОВ ЖИДКОСТИ РАКЕТ-НОСИТЕЛЕЙ | 2019 |
|
RU2722519C1 |
| WO 2018057068 A2, 29.03.2018 | |||
| WO 2011157641 A1, 22.12.2011. | |||

