Изобретение относится к системам наведения ракет и торпед, а именно к оборонительно-наступательным системам, и может быть использовано для уничтожения высокоскоростных маневрирующих подводных целей, в том числе находящихся подо льдом, ракетами с торпедной боевой частью и торпедами.
Известны способы уничтожения подводной цели торпедой (RU 2513366, RU 2622051), в каждом из которых обнаруживают подводную цель и определяют ее текущие координаты; на станции управления запускают ракету с торпедной боевой частью (ТБЧ); на ракете определяют ее текущие координаты; определяют текущие координаты места погружения ТБЧ в воду и рассчитывают траекторию полета ракеты к этому месту; формируют команды наведения ракеты на место погружения ТБЧ в воду по расчетной траектории; формируют команду отделения ТБЧ от ракеты в конце расчетной траектории; на ТБЧ определяют ее текущие координаты; рассчитывают траекторию движения ТБЧ к цели; формируют команды наведения ТБЧ на цель по расчетной траектории.
Однако, такие способы не обеспечивают: - предотвращение столкновения ракеты со сторонними объектами и обход ракетой зон действия противоракетной обороны противника, т.к. не учитывают информацию о таких объектах и зонах; - возможность уничтожения подводной цели, находящейся подо льдом, т.к. не предусматривают преодоление толщи льда; - высокую надежность обнаружения и сопровождения цели и высокую точность определения ее координат, т.к. не предусматривают обзор цели с различных направлений; - предотвращение столкновения ТБЧ со сторонними объектами, т.к. не учитывают информацию о таких объектах; - оптимизацию подхода ТБЧ к цели, т.к. не предусматривают вывод ТБЧ на встречный курс; - оптимизацию соотношения скорости и маневренности для ТБЧ, т.к. не учитывают скорости ТБЧ и цели; - защиту наведения ТБЧ от противодействия со стороны цели, направленного на головку самонаведения ТБЧ.
Указанные недостатки известных способов снижают вероятность уничтожения цели.
Цель изобретения - повышение вероятности уничтожения высокоскоростной маневрирующей подводной цели торпедой.
Предложенный способ заключается в том, что:
- в гидроакустической системе обнаруживают и сопровождают подводную цель, определяют текущие координаты и скорость цели, а также ее характеристики, и передают их в оборонительно-наступательную систему (ОНС);
- в ОНС определяют траекторию цели, относительно которой она маневрирует, прогнозируют продолжение этой траектории и определяют текущие координаты места выхода торпеды на встречный курс;
- в ОНС назначают ракету с ТБЧ или торпеду, а также станцию управления, и передают данные ракеты или торпеды на станцию управления;
- на станции управления, в случае нахождения цели подо льдом, снабжают торпеду или ТБЧ средствами преодоления толщи льда;
- на станции управления запускают ракету с ТБЧ или торпеду;
- на ракете определяют ее текущие координаты и скорость и передают их через станцию управления в ОНС;
- в ОНС определяют текущие координаты места погружения ТБЧ в воду, а также рассчитывают траекторию и скорость полета ракеты к этому месту и передают их на станцию управления;
- на станции управления формируют команды наведения ракеты на место погружения ТБЧ в воду по расчетной траектории с расчетной скоростью и передают их на ракету;
- на станции управления формируют команду отделения ТБЧ от ракеты в конце расчетной траектории и передают ее на ракету;
- на торпеде или ТБЧ, в случае нахождения цели подо льдом, преодолевают толщу льда и погружают торпеду или ТБЧ в воду;
- на торпеде или ТБЧ определяют ее текущие координаты и скорость и передают их через станцию управления в ОНС;
- в ОНС рассчитывают траекторию и скорость движения торпеды или ТБЧ к месту выхода на встречный курс и передают их на станцию управления;
- на станции управления формируют команды наведения торпеды или ТБЧ на место выхода на встречный курс по расчетной траектории с расчетной скоростью и передают их на торпеду или ТБЧ;
- в ОНС, после выхода торпеды или ТБЧ на встречный курс, рассчитывают траекторию и скорость движения торпеды или ТБЧ к цели и передают их на станцию управления;
- на станции управления формируют команды наведения торпеды или ТБЧ на цель по расчетной траектории с расчетной скоростью и передают их на торпеду или ТБЧ.
Гидроакустическая система аналогична известной (iz.ru/news/647107). Цель аналогична торпеде «Посейдон» (www.gazeta.ru/army/2021/12/29/14372341.shtml). Координаты и скорость цели определяют в результате ее обзора с различных направлений, а характеристики цели - в результате ее сопровождения.
ОНС аналогична известной (RU 2753498). Траекторию цели, относительно которой она маневрирует, определяют на основе анализа ее фактической траектории. Место выхода торпеды или ТБЧ на встречный курс выбирают на прогнозируемом продолжении траектории цели из условия обеспечения торпеде или ТБЧ времени, достаточного для уничтожения цели.
Ракету, ТБЧ, торпеду и станцию управления назначают, исходя из их эффективности. Информацию о нахождении цели подо льдом передают на станцию управления вместе с данными ТБЧ или торпеды. Средства преодоления толщи льда аналогичны известным (RU 2707233). На ракете, торпеде и ТБЧ, их координаты и скорости определяют с помощью бортовых инерциальных систем навигации, корректируемых с помощью глобальной спутниковой системы навигации.
Место погружения ТБЧ в воду выбирают из условия обеспечения ТБЧ времени, достаточного для выхода на встречный курс. Траекторию и скорость полета ракеты рассчитывают из условия предотвращения ее столкновения со сторонними объектами и условия обхода ракетой зон действия противоракетной обороны противника.
Траекторию и скорость движения торпеды или ТБЧ рассчитывают из условия предотвращения ее столкновения со сторонними объектами и условия столкновения торпеды или ТБЧ с целью под требуемым углом с требуемой скоростью. Координаты и размеры сторонних объектов определяют в гидроакустической системе и передают их в ОНС.
Чем выше скорость торпеды, тем выше ее инерционность и ниже маневренность. Соотношение скорости и маневренности для торпеды или ТБЧ на конечном участке траектории оптимизируют путем задания скорости, необходимой и достаточной для уничтожения цели при столкновении.
Связь между торпедой или ТБЧ и станцией управления, а также контроль точности наведения торпеды или ТБЧ осуществляют известными способами (RU 2730749). Благодаря точному определению координат и скорости цели, головка самонаведения на торпеде или ТБЧ не требуется.
Предложенный способ может быть реализован в системе, блок-схема которой приведена на чертеже.
Блоки: 1 - гидроакустическая система; 2 - ОНС; 3 - станция управления; 4 - ракета с ТБЧ; 5 - ТБЧ, отделенная от ракеты, или торпеда.
Связи между блоками: 1-2 - текущие координаты и скорость цели, а также ее характеристики; 2-3 - данные ракеты или торпеды, расчетные траектория и скорость полета ракеты к месту погружения ТБЧ в воду, расчетные траектория и скорость движения торпеды или ТБЧ к месту выхода на встречный курс, а также расчетные траектория и скорость движения торпеды или ТБЧ к цели; 3-2 - текущие координаты и скорость ракеты, а также текущие координаты и скорость торпеды или ТБЧ; 3-4 - команды наведения ракеты на место погружения ТБЧ в воду по расчетной траектории с расчетной скоростью, а также команда отделения ТБЧ от ракеты в конце расчетной траектории; 3-5 - команды наведения торпеды или ТБЧ на место выхода на встречный курс по расчетной траектории с расчетной скоростью, а также команды наведения торпеды или ТБЧ на цель по расчетной траектории с расчетной скоростью; 4-3 - текущие координаты и скорость ракеты; 5-3 - текущие координаты и скорость торпеды или ТБЧ.

Изобретение относится к способу наведения ракет и торпед. В гидроакустической системе определяют координаты, скорость и характеристики подводной цели и передают их в оборонительно-наступательную систему (ОНС), где определяют траекторию цели, относительно которой она маневрирует, и координаты места выхода торпеды на встречный курс, назначают ракету с торпедной боевой частью (ТБЧ) или торпеду и передают ее данные на станцию управления (СУ), где при необходимости снабжают торпеду или ТБЧ средствами преодоления толщи льда и запускают ракету или торпеду. На ракете определяют ее координаты и скорость и передают их через СУ в ОНС, где определяют координаты места погружения ТБЧ в воду, рассчитывают траекторию и скорость полета ракеты к этому месту и передают их на СУ, где формируют команды наведения ракеты на место погружения ТБЧ в воду и команду отделения ТБЧ от ракеты и передают их на ракету. На торпеде или ТБЧ при необходимости преодолевают толщу льда и погружают торпеду или ТБЧ в воду. На торпеде или ТБЧ определяют ее координаты и скорость и передают их через СУ в ОНС, где рассчитывают траекторию и скорость движения торпеды или ТБЧ к месту выхода на встречный курс и передают их на СУ, где формируют команды наведения торпеды или ТБЧ на место выхода на встречный курс и передают их на торпеду или ТБЧ. В ОНС рассчитывают траекторию и скорость движения торпеды или ТБЧ к цели и передают их на СУ, где формируют команды наведения торпеды или ТБЧ на цель и передают их на торпеду или ТБЧ. Повышается вероятность уничтожения высокоскоростной маневрирующей подводной цели. 1 ил.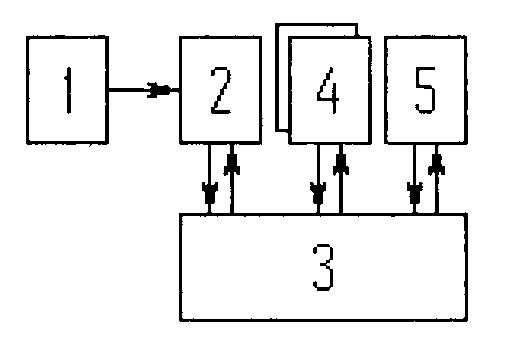
Способ уничтожения высокоскоростной маневрирующей подводной цели торпедой, заключающийся в том, что обнаруживают подводную цель и определяют ее текущие координаты; на станции управления (СУ) запускают ракету с торпедной боевой частью (ТБЧ); на ракете определяют ее текущие координаты; определяют текущие координаты места погружения ТБЧ в воду и рассчитывают траекторию полета ракеты к этому месту; формируют команды наведения ракеты на место погружения ТБЧ в воду по расчетной траектории; формируют команду отделения ТБЧ от ракеты в конце расчетной траектории; на ТБЧ определяют ее текущие координаты; рассчитывают траекторию движения ТБЧ к цели; формируют команды наведения ТБЧ на цель по расчетной траектории;
отличающийся тем, что обнаружение подводной цели и определение ее текущих координат осуществляют в гидроакустической системе, где также сопровождают подводную цель, определяют ее текущую скорость и характеристики и передают их вместе с текущими координатами в оборонительно-наступательную систему (ОНС); в ОНС определяют траекторию цели, относительно которой она маневрирует, прогнозируют продолжение этой траектории и определяют текущие координаты места выхода торпеды на встречный курс; в ОНС назначают ракету с ТБЧ или торпеду, а также СУ, и передают данные ракеты или торпеды на СУ; на СУ, в случае нахождения цели подо льдом, снабжают торпеду или ТБЧ средствами преодоления толщи льда; на СУ запускают ракету с ТБЧ или торпеду; на ракете определяют ее текущие координаты и скорость и передают их через СУ в ОНС; определение текущих координат места погружения ТБЧ в воду и расчет траектории полета ракеты к этому месту осуществляют в ОНС, где также рассчитывают скорость полета ракеты и передают ее вместе с расчетной траекторией на СУ; команды наведения ракеты на место погружения ТБЧ в воду по расчетной траектории формируют на СУ с учетом расчетной скорости и передают их на ракету; команду отделения ТБЧ от ракеты в конце расчетной траектории формируют на СУ и передают ее на ракету; на торпеде или ТБЧ, в случае нахождения цели подо льдом, преодолевают толщу льда и погружают торпеду или ТБЧ в воду; на торпеде или ТБЧ определяют ее текущие координаты и скорость и передают их через СУ в ОНС; в ОНС рассчитывают траекторию и скорость движения торпеды или ТБЧ к месту выхода на встречный курс и передают их на СУ; на СУ формируют команды наведения торпеды или ТБЧ на место выхода на встречный курс по расчетной траектории с расчетной скоростью и передают их на торпеду или ТБЧ; в ОНС, после выхода торпеды или ТБЧ на встречный курс, рассчитывают траекторию и скорость движения торпеды или ТБЧ к цели и передают их на СУ; на СУ формируют команды наведения торпеды или ТБЧ на цель по расчетной траектории с расчетной скоростью и передают их на торпеду или ТБЧ.
| Гидроакустический способ управления торпедой | 2017 |
|
RU2649675C1 |
| СПОСОБ ПОРАЖЕНИЯ ПОДВОДНОЙ ЛОДКИ | 2018 |
|
RU2711409C2 |
| СПОСОБ ТЕЛЕУПРАВЛЯЕМОГО НАВЕДЕНИЯ ПОДВОДНОГО АППАРАТА | 2018 |
|
RU2700827C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2014 |
|
RU2583120C2 |
| СПОСОБ ПОРАЖЕНИЯ МОРСКОЙ ЦЕЛИ | 2020 |
|
RU2742904C1 |
| Система противоторпедной защиты гидроакустического комплекса подводной лодки | 2016 |
|
RU2661066C1 |

