Область техники
[01] Заявленное изобретение касается трамбовки для шпалоподбивочной машины для подбивки рельсового пути, имеющей ось трамбовки, которая на своем верхнем конце имеет крепежный участок для закрепления трамбовки в держателе и которая на своем нижнем конце переходит в пластину трамбовки. Изобретение касается также шпалоподбивочной машины для подбивки рельсового пути, при этом расположенные напротив друг друга подбивочные инструменты могут подвергаться воздействию вибрации и при этом расположены на переставляемом по высоте держателе инструментов с возможностью перемещения навстречу друг к другу. Далее, касается изобретение способа эксплуатации шпалоподбивочной машины с трамбовками.
Уровень техники
[02] Например, описывается в публикации WO2011/003427 А1 трамбовка для шпалоподбивочной машины для подбивки рельсового пути. При этом включает в себя шпалоподбивочная машина шпалоподбивочные инструменты с держателями трамбовок для прочного зажимания соответствующей трамбовки.
[03] В публикации WO2018/219570 А1 описан способ уплотнения щебеночной постели рельсового пути с помощью шпалоподбивочной машины. При этом на держателе трамбовки шпалоподбивочного агрегата расположены сенсоры для измерения усилия, чтобы во время цикла вибрации регистрировать кривую усилия, воздействующего на шпалоподбивочный инструмент. Альтернативно этому могут наклеиваться на внешней плоскости соответствующей трамбовки тензорные датчики. Отрицательным при этом является то, что продолжительность ее эксплуатации является недостаточной, а также ее применение является сложным и дорогостоящим.
Краткое описание изобретения
[04] В основе заявленного изобретения лежит задача предложить трамбовку указанного выше типа, с помощью которой можно выполнять улучшенный процесс подбивки. Следующая задача заявленного изобретения состоит в том, чтобы предложить шпалоподбивочную машину для улучшенного выполнения процесса подбивки. Дополнительно предлагается соответствующий улучшенный способ эксплуатации шпалоподбивочной машины.
[05] В соответствии с заявленным изобретением эти задачи решаются благодаря признакам независимых пунктов 1, 10 и 12. В зависимых пунктах формулы описаны предпочтительные варианты выполнения заявленного изобретения.
[06] При этом в выемке в оси трамбовки устанавливается чувствительный элемент сенсора, и трамбовка включает в себя соединительный элемент для передачи сигнала сенсора. Таким образом, трамбовка сама выполняет функцию сенсора для регистрации возникающих в трамбовке измеряемых величин. При этом задается оптимальное расположение чувствительного элемента, потому что выемка в оси трамбовки согласуется со свойствами сенсора. Необходимые измеряемые величины регистрируются с высокой точностью, при этом интегрирование чувствительного элемента в ось трамбовки предотвращает влияние помех. Дополнительно защищает такая конструкция чувствительный элемент от повреждений.
[07] В другом предпочтительном варианте выполнения изобретения включает в себя трамбовка электронный элемент сенсора. Тем самым, например, до выдвижения трамбовки возможно выполнение калибровки сенсора или чувствительного элемента, потому что данные калибровки могут накапливаться в электронном элементе. Предпочтительно включает в себя электронный элемент накопительный чип, подсоединение которого выполняется через внешний кабель.
[08] В другом улучшенном варианте выполнения изобретения предусматривается, что чувствительный элемент выполняется конструктивно для регистрации нескольких измеряемых величин, возникающих в трамбовке. Например, дополнительно к механической нагрузке регистрируется температура трамбовки. Таким образом, используется сенсор для контроля условий использования во время процесса подбивки, чтобы определять на основании этого требования к проведению обслуживания.
[09] Для простой замены трамбовки оказывается предпочтительным, если соединительный элемент выполняется как разъемное штекерное соединение. При замене трамбовки вынимается штекерное соединение, и трамбовка заменяется на новую трамбовку. Новая трамбовка имеет аналогичный штекерный разъем, чтобы получить такое же штекерное соединение.
[10] Для обеспечения компактности включает в себя трамбовка электронный конструктивный элемент как целесообразный для маркировки трамбовки. При этом речь идет о так называемом элементе Trustet Platform Modul, который предотвращает манипуляцию с маркировкой.
[11] В предпочтительном варианте выполнения трамбовки является чувствительный элемент, наклеенный на выемке удлиняющимся элементом. Таким образом, могут просто регистрироваться воздействующие на трамбовку усилия и ускорения.
[12] В другом улучшенном варианте выполнения изобретения предусматривается, что чувствительный элемент представляет собой световод с волоконной решеткой Брага. С помощью такой волоконной решетки Брага могут в заданных точках световода измеряться растяжения, деформация при сжатиях и прогибы. На основании этого могут определяться усилия, ускорения и изменения температуры.
[13] При этом оказывается целесообразным, если световод выступает за пределы выемки оси трамбовки и чтобы выступающий участок световода был охвачен гибкой защитной оболочкой. Таким образом, световод простирается с защитной оболочкой до места, в котором располагается вычислительная электроника.
[14] Предпочтительно выполняется выемка в форме продольного отверстия в стержне оси трамбовки. Тем самым, чувствительный элемент сенсора оптимально защищается от повреждений без оказания отрицательного влияния на ось трамбовки. В точке выхода трамбовки располагается в данном случае механическая защита от прогиба.
[15] В случае заявленной шпалоподбивочной машины для подбивки рельсового пути подвергаются расположенные напротив друг друга шпалоподбивочные инструменты воздействию вибрации и располагаются на переставляемом по высоте держателе инструментов с возможностью перемещения навстречу друг другу, при этом соответствующий шпалоподбивочный инструмент включает в себя приемник трамбовки, в котором крепится указанная выше трамбовка, и при этом вычислительное устройство соединяется с сенсором соответствующей трамбовки. Тем самым, во время процесса подбивки могут регистрироваться возникающие в трамбовке измеряемые усилия, чтобы, тем самым, выполнять оптимально процесс подбивки.
[16] При этом оказывается предпочтительным, если вычислительное устройство соединяется с помощью штекерного соединения с соответствующим сенсором и если соответствующее штекерное соединение располагается, в частности, на держателе инструментов. Это упрощает замену трамбовки без повреждения регистрации измеряемых величин.
[17] В заявленном способе эксплуатации описанной шпалоподбивочной машины с описанными трамбовками предусматривается, что во время процесса подбивки определяют с помощью соответствующего сенсора измеряемую величину, возникающую в соответствующей трамбовке, и регистрируют с помощью вычислительного устройства. Тем самым, оказываются полезными зарегистрированные во время процесса подбивки измеряемые величины для оптимизации выполняемых последующих процессов подбивки. Дополнительно могут документироваться качество подбивки и возникающие нагрузки.
[18] В улучшенном варианте выполнения способа выполняют перед процессом подбивки процесс калибровки для каждого сенсора, чтобы определить величины калибровки. С помощью такого обновления повторяющихся величин калибровки обеспечивается то, что каждый сенсор работает с наибольшей точностью в любое время.
[19] В другом варианте улучшенного выполнения способа предусматривается, что перед процессом подбивки начинается процесс считывания для каждой трамбовки и что при отсутствии или фальшивом электронном конструктивном элементе для маркировки соответствующей трамбовки процесс подбивки блокируется. Тем самым, предотвращается, чтобы шпалоподбивочная машина эксплуатировалась с фальшивой трамбовкой. Использование фальшивой трамбовки может повлечь за собой ухудшение качества подбивки или сильный износ. Дополнительно не могут использоваться фальшивые трамбовки для регистрации измеряемых величин в соответствии с заявленным изобретением.
[20] Для того, чтобы иметь возможность в любое время запрашивать актуальный статус шпалоподбивочной машины оказывается целесообразным, если регистрировать замену трамбовки с помощью вычислительного устройства. Соответствующие данные о статусе могут передаваться в форме облака точек, чтобы протоколировать каждый процесс замены.
Краткое описание чертежей
[21] Заявленное изобретение поясняется ниже более подробно на примерах его выполнения со ссылкой на прилагаемые фигуры. На них схематически изображено:
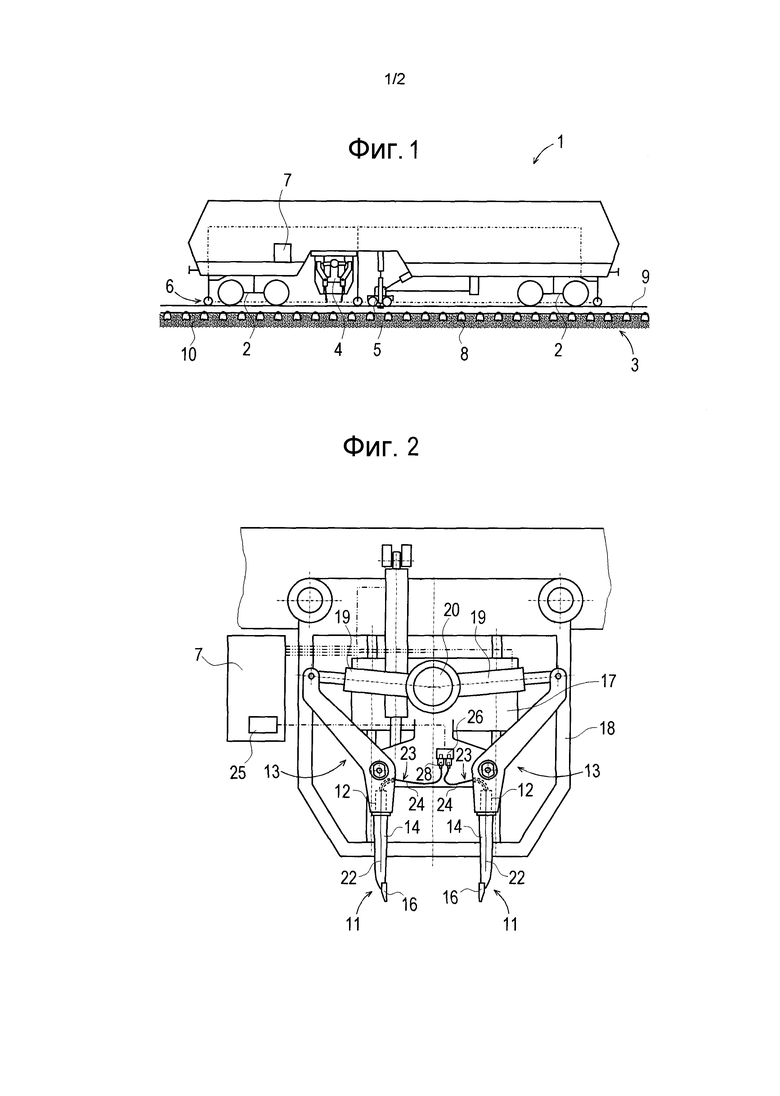
На Фиг. 1 изображена шпалоподбивочная машина
На Фиг. 2 изображен шпалоподбивочный агрегат
На Фиг. 3 изображена трамбовка с продольным отверстием
На Фиг. 4 изображена трамбовка с чувствительным элементом и соединительным элементом
На фиг. 5 изображена трамбовка в приемнике трамбовки Описание вариантов выполнения изобретения
[22] Показанная на Фиг. 1 шпалоподбивочная машина 1 может перемещаться на рельсовых ходовых механизмах 2 по не подбитому рельсовому пути 3 и включает в себя шпалоподбивочный агрегат 4, подъемно-рихтовочный агрегат 5, измерительную систему 6 и систему управления 7 машиной. Рельсовый путь 3 расположен на щебне, у которого образованная из шпал 8 и рельсов 9 железнодорожная решетка располагается на щебеночной постели 10. Во время процесса подбивки поднимается с помощью подъемно-рихтовочного агрегата 5 железнодорожная решетка в заданное положение и в данном случае смещается в сторону. Сравнение действительного положения железнодорожной решетки с заданным положением осуществляется с помощью измерительной системы 6.
[23] Заданное положение фиксируется, как только шпалоподбивочный агрегат 4 внедряется между шпалами 8 в щебеночную постель 10 и начинает уплотнять благодаря вспомогательному движению щебень под шпалами 8. Включение подъемно-рихтовочного агрегата 5 и шпалоподбивочного агрегата 4 осуществляется с помощью системы управления 7 машиной при использовании измерительной системы 6.
[24] Каждая трамбовка 11 крепится в приемнике 12 трамбовки шпалоподбивочного инструмента 13. Для этого имеет ось 14 трамбовки соответствующей шпалоподбивочной трамбовки 11 на своем верхнем конце удерживающий участок 15, который вставляется в приемник 12 трамбовки. Например, выполняется удерживающий участок 15 конструктивно цилиндрическим и образует вместе с цилиндрической внутренней поверхностью приемника 12 трамбовки посадку. С помощью винтовых соединений удерживающий участок 15 трамбовки прочно зажимается в приемнике 12 трамбовки. На своем нижнем конце переходит ось 14 трамбовки в пластину 16 трамбовки.
[25] Расположенные напротив друг друга шпалоподбивочные инструменты 13 установлены в форме клещей на общем держателе 17 инструментов. Держатель 17 инструментов направляется с возможностью перестановки по высоте в агрегатной раме 18. Верхние концы шпалоподбивочных инструментов 13 соединяются через соответствующие вспомогательные приводы 19 с генератором 20 вибраций. Например, вспомогательные приводы 19 располагаются на вращающемся эксцентриковом валу. В альтернативном варианте выполнения изобретения интегрирован источник возникновения вибрации в соответствующем вспомогательном приводе 19. При этом в гидравлическом цилиндре накладываются на вспомогательный подъем циклические вибрационные подъемы.
[26] Для того, чтобы контролировать процесс подбивки и в данном случае оказывать на него влияние регистрируется, по меньшей мере, одна измеряемая величина, возникающая в трамбовке 11. Для этого располагается в выемке 21 в оси 14 трамбовки чувствительный элемент 22 сенсора 23. Через соединительный элемент 24, соединенный с чувствительным элементом 22, направляется измеряемая величина в вычислительное устройство 25. В изображенном на Фиг. 2 варианте выполнения изобретения соединяется вычислительное устройство 25 с помощью штекерного соединения 26 с соответствующим сенсором 23. Вычислительное устройство 25 устанавливается, например, в системе управления 7 машиной.
[27] Предпочтительно представляет собой чувствительный элемент 22 световод с волоконной решеткой Брага. При этом участок с волоконной решеткой Брага наклеивается в выемке 21 в оси 14 трамбовки. Таким образом, передаются растяжения, сжатия или прогибы в оси 14 трамбовки на световод. В отверстии 27 выемки световод выступает из оси 14 трамбовки. Предпочтительно располагается здесь защита, чтобы предотвратить повреждение световода. На примере, согласно Фиг. 2, образует выступающий участок световода вместе с подключением к сенсорной электронике 28 соединительный элемент 24. Этот участок окружен гибкой защитной оболочкой (например, защитный шланг).
[28] Зарегистрированные с помощью волоконной оптики сенсора 23 удлинения, сжатия и прогибы оси 14 трамбовки в дальнейшем оцениваются. Например, определяются математически в вычислительном устройстве 25 на этом основании усилия, ускорения и изменения температуры. Также могут определяться с помощью сенсорной электроники 28 на основании измерительных сигналов другие измеряемые величины. Базисом для этого является выполненный предварительно процесс калибровки.
[29] Калибровка сенсора 23 выполняется, например, производителем перед поставкой. При этом калибровочные данные накапливаются в сенсоре 23 или в собственном накопительном элементе. Выгодным образом в трамбовке 11 наклеивается накопительный чип 29, подключение которого выполняется снаружи через кабель. В случае альтернативного беспроводного сенсора 23 происходит считывание данных с накопительного чипа с помощью считывающего прибора, который может быть выполнен конструктивно стационарным или мобильным. Данные направляются в систему управления 7 машиной через радиоинтерфейс.
[30] Альтернативно или дополнительно к инициированной калибровке выполняется перед каждым применением машины программа автоматической калибровки. При этом для каждой трамбовки определяются калибровочные величины. Накопление актуальных величин осуществляется в накопительном чипе 29.
[31] Трамбовка 11 включает в себя как целесообразный другой конструктивный электронный элемент 30, который позволяет выполнить электронную маркировку трамбовки 11. Например, устанавливается, так называемый, Truster Platform Modul, который надежно идентифицирует фальшивую трамбовку 11. Выгодным образом интегрируются в сенсорную электронику 28 накопительный чип 29 и электронный конструктивный элемент 30.
[32] Система управления 7 машиной выполнена при этом таким образом, что после включения в работу машины 1 и перед выполнением первого процесса подбивки начинается процесс считывания. Если отсутствует соответствующий электронный конструктивный элемент 30 или не представляется возможной идентификация соответствующей трамбовки 11, то процесс подбивки блокируется. Тем самым, предотвращается то, чтобы процесс подбивки мог выполняться фальшивыми трамбовками. Процесс считывания оказывается полезным также для протоколирования замены трамбовки.
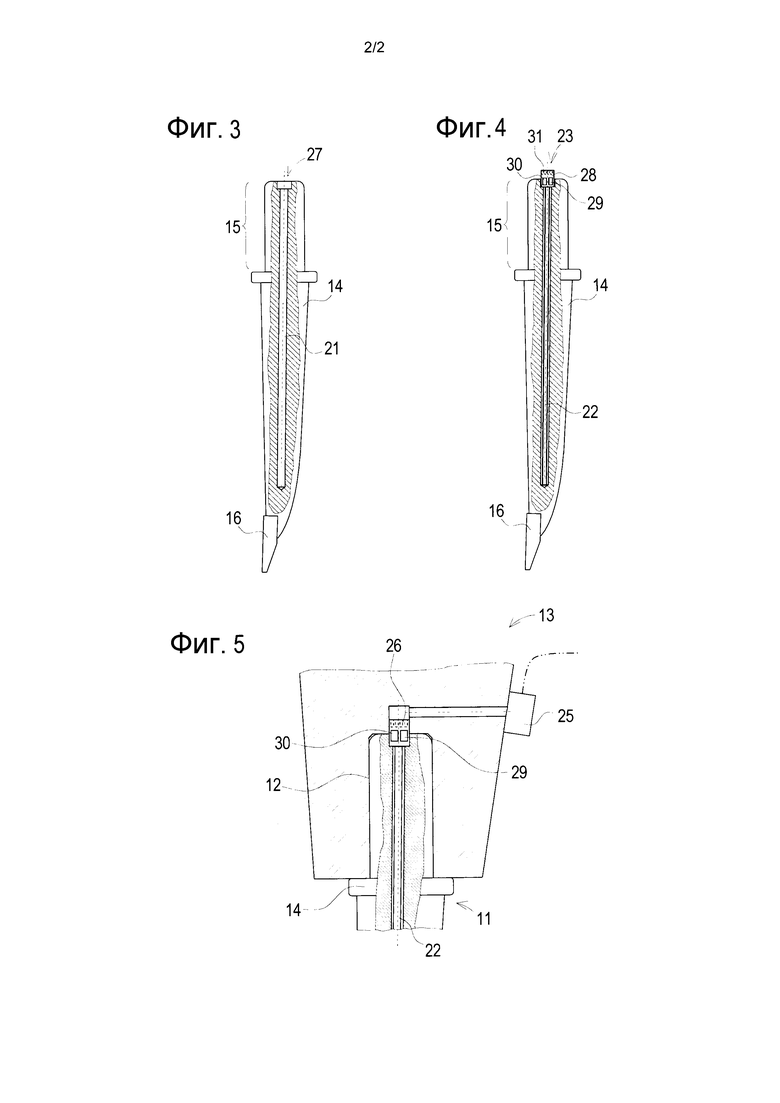
[33] На Фиг. 3 изображено в качестве выемки 21 продольное отверстие в сердечнике оси 14 трамбовки. Этой выемкой ось 14 трамбовки не ослабляется, потому что момент инерции сечения поперечного сечения оси нагружается только незначительно. Продольное отверстие простирается приблизительно до пластины 16 трамбовки. Тем самым, действующие на пластину 16 трамбовки противодействующие усилия щебеночной постели 10 могут непосредственно регистрироваться с помощью волоконной решетки Брага на конце наклеенного световода. В более простом варианте выполнения изобретения выполняется выемка 21 как паз вдоль оси 14 трамбовки, при этом паз запечатывается после установления чувствительного элемента 22.
[34] В области отверстия выемки 27 предусматривается углубление для сенсорной электроники 28. При этом в наклеенном корпусе для электроники располагается также накопительный чип 29 и электронный конструктивный элемент 30, а также штекерные контакты 31 (Фиг. 4). В этом конструктивном варианте трамбовка 11 включает в себя общий сенсор 23.
[35] В смонтированном состоянии шпалоподбивочной трамбовки 11 соединяются штекерные контакты 31 с контактами держателя 12 трамбовки (Фиг. 5). Это штекерное соединение расположено защищенным в приемнике 12 трамбовки и соединяет сенсор 23 с вычислительным устройством 25, закрепленном на шпалоподбивочном инструменте 13. Соединение с системой управления 7 машиной осуществляется по кабелю или через радиоинтерфейс.
[36] Непосредственная регистрация механических усилий вибраций и, в данном случае, температуры в трамбовке 11 позволяет выполнить текущий контроль состояния. Это касается, прежде всего, состояния обработанной щебеночной постели 10. На основании этого могут получаться согласованные параметры управления, чтобы согласовывать процесс подбивки с соответствующим состоянием щебеночной постели. Это происходит автоматически в системе управления 7 машиной на основе сенсорных данных и приводит к оптимальному включению приводов агрегатов.
[37] Наряду с регистрацией состояния щебеночной постели 10 обеспечивают сенсоры 23 протоколирование отдельных этапов подбивки. При этом оказывается целесообразным, если для отдельных измеряемых величин будут задаваться их пределы, чтобы своевременно определять их нежелательные отклонения. Таким образом, могут определяться условия, при которых появляются погрешности, и проявляющиеся явления износа. Оценка данных протокола позволяет выполнять предсказанное обслуживание мест износа, в частности трамбовок 11 (предсказанное обслуживание).
Группа изобретений относится к области обслуживания железнодорожного пути, в частности, к подбойкам шпалоподбивочных машин, шпалоподбивочным машинам, укомплектованным подобными подбойками, а также к способам эксплуатации подобных машин. Подбойка содержит ось с участком для крепления подбойки в машине и пластину для подбивки пути. В оси подбойки выполнена выемка. В выемке располагают чувствительный элемент сенсора. Соединительный элемент для передачи сигналов выполнен в теле подбойки. При установке подбойки в шпалоподбивочной машине вычислительное устройство машины соединяют с сенсором подбойки. Во время подбивки показания сенсора от подбойки регистрируют с помощью вычислительного устройства машины. Повышается эффективность подбивки балласта. 3 н. и 12 з.п. ф-лы, 5 ил.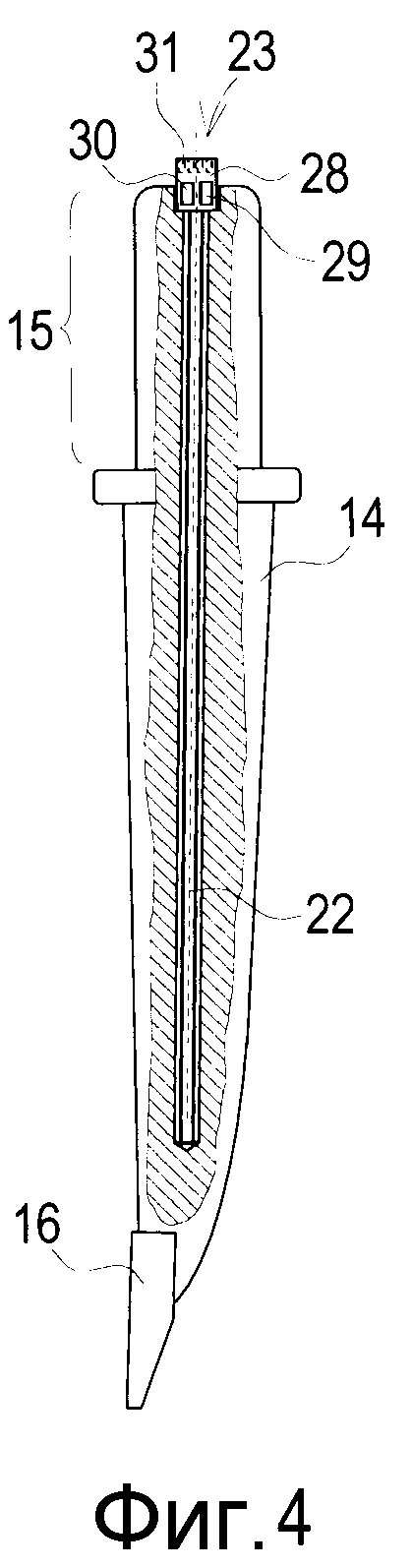
1. Трамбовка (11) для шпалоподбивочной машины (1) для подбивки рельсового пути (3), имеющая ось (14) трамбовки, которая на своем верхнем конце имеет удерживающий участок (15) для крепления трамбовки в приемнике (12) трамбовки и которая на своем нижнем конце переходит в пластину (6) трамбовки,
отличающаяся тем, что
в выемке (21) в оси (14) трамбовки располагают чувствительный элемент (22) сенсора (23) и что трамбовка (11) включает в себя соединительный элемент (24) для передачи сигналов сенсора.
2. Трамбовка (11) по п. 1,
отличающаяся тем, что
трамбовка (11) включает в себя электронику (28) сенсора (23).
3. Трамбовка (11) по п. 1 или 2,
отличающаяся тем, что
чувствительный элемент (22) выполнен конструктивно для регистрации нескольких измеряемых величин, возникающих в трамбовке (11).
4. Трамбовка (11) по одному из пп. 1 - 3,
отличающаяся тем, что
соединительный элемент (24) представляет собой элемент разъемного штекерного соединения (26).
5. Трамбовка по одному из пп. 1 - 4,
отличающаяся тем, что
трамбовка (11) включает в себя электронный конструктивный элемент (30), в частности Trustet Platform Modul, для маркировки трамбовки (11).
6. Трамбовка (11) по одному из пп. 1 - 5,
отличающаяся тем, что
чувствительный элемент (22) представляет собой удлиняющийся элемент, наклеенный в выемке (21).
7. Трамбовка (11) по одному из пп. 1 - 6,
отличающаяся тем, что
чувствительный элемент (22) представляет собой световод с волоконной решеткой Брага.
8. Трамбовка (11) по п. 7,
отличающаяся тем, что
световод выступает из выемки (21) в оси (14) трамбовки и что выступающий участок световода закрыт гибкой защитной оболочкой.
9. Трамбовка (11) по одному из пп. 1 - 8,
отличающаяся тем, что
выемка (21) выполнена конструктивно как продольное отверстие в пазе оси (14) трамбовки.
10. Шпалоподбивочная машина (1) для подбивки рельсового пути (3), при этом расположенные напротив друг друга шпалоподбивочные инструменты (13) подвергаются воздействию вибрации и расположены на перемещающемся по высоте держателе (17) инструментов с возможностью выполнения вспомогательного движения навстречу друг другу,
отличающаяся тем, что
соответствующий шпалоподбивочный инструмент (13) включает в себя приемник (12) трамбовки, в котором крепится трамбовка (11) по одному из пп. 1 - 9, и что вычислительное устройство (25) соединено с сенсором (23) соответствующей трамбовки (11).
11. Шпалоподбивочная машина (1) по п. 10,
отличающаяся тем, что
вычислительное устройство (25) соединено с помощью штекерного соединения (26) с соответствующим сенсором (23) и что соответствующее штекерное соединение (26) расположено, в частности, на держателе (17) инструментов.
12. Способ эксплуатации шпалоподбивочной машины (1) по п. 10 или 11 с трамбовкой (11) по одному из пп. 1 - 9,
отличающийся тем, что во время процесса подбивки определяют измеряемую величину, возникающую в соответствующей трамбовке (11), с помощью соответствующего сенсора (23) и регистрируют с помощью вычислительного устройства (25).
13. Способ по п. 12,
отличающийся тем, что
перед процессом подбивки выполняют процесс калибровки для каждого сенсора (23), чтобы определить калибровочные величины.
14. Способ по п. 12 или 13,
отличающийся тем, что
перед процессом подбивки начинают процесс считывания для каждой трамбовки (11) и что при отсутствии или фальшивом электронном конструктивном элементе (30) для идентификации соответствующей трамбовки (11) процесс подбивки блокируют.
15. Способ по одному из пп. 12 - 14,
отличающийся тем, что
регистрируют замену трамбовки (11) с помощью вычислительного устройства (25).
| JP S51149605 A, 22.12.1976 | |||
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| 0 |
|
SU161330A1 | |

