Изобретение относится к роботизированным средствам контроля подводной инфраструктуры, в частности средствам контроля подводных добычных комплексов (ПДК).
Подводные добычные комплексы для нефтегазодобычи на морском шельфе требуют повышенного внимания к их текущему состоянию из-за высоких рисков серьезных экологических катастроф, возникающих при авариях на ПДК, и связанных с загрязнениями окружающей среды продуктами добычи.
Мониторинг технического состояния ПДК, который со всеми его объектами может занимать большую площадь на морском дне, в целом включает контроль его объектов, контроль подводной среды и контроль состояния площадки, на которой размещен ПДК. На морских месторождениях мониторинг обеспечивается комплексом сложных технологических операций, которые по характеру воздействия на объекты контроля разделяются на контактные и бесконтактные. При контактных операциях, которые обычно выполняются телеуправляемыми подводными аппаратами, необходимо обеспечивать прецизионное перемещение аппарата как носителя рабочего инструмента по объекту и механические воздействия на блоки и узлы устройств на объектах (к таким например относятся чистка от обрастаний, перемещение запорных арматур, ультразвуковой контроль толщин, взятие проб продуктов и среды, измерение параметров и замена элементов электрохимической защиты от коррозии). Важнейшим условием эффективности контактных работ является наличие супервизорного управления ходом работ из пунктов управления. Бесконтактные операции (осмотр и обследование площадки ПДК, измерения физико-химических полей, контроль положения объектов) включают работы по всей площади ПДК, на объектах и в их окрестностях, с использованием буксируемых или автономных подводных аппаратов, оборудованных системами технического зрения и необходимыми измерителями /1- Матвиенко Ю.В., Ремезков А.В. Концепция создания роботизированного комплекса обследования и мониторинга технического состояния объектов подводной добычи // Газовая промышленность. Автоматизация. - 2020. № 2(802). С. 30-37/.
Известные системы мониторинга технического состояния объектов ПДК предполагают установку на них комплекта встроенных датчиков, которые обеспечивают измерения отдельных параметров в точках установки. Датчики соединены линиями связи с пунктами управления, в которых выполняется обработка данных и принятие решение о состоянии ПДК./2- (патент RU 2464485, МПК F17D 5/02, F17D/ 5/06 (2006.01))./. Однако такие системы контролируют круг параметров, ограниченный характеристиками датчиков, не обеспечивают измерений по всей площадке ПДК и, кроме того, фактически только фиксируют факт аварийной ситуации без возможности профилактического влияния на ее развитие.
Более полную картину текущего технического состояния ПДК и его объектов с расширением количества и качества измеряемых характеристик за счет выполнения бесконтактных операций по контролю геологических изменений структуры донного грунта площадки ПДК, контролю планово-высотного положения объектов, как протяженных (типа трубопроводов), так и компактных (типа манифольдов, фонтанных арматур), измерению состояния физических и химических полей в районе ПДК, а также выполнению контактных операций по чистке объектов от обрастаний, перемещению запорных арматур, ультразвуковому контролю толщин, взятию проб продуктов и среды, измерению параметров и замене элементов электрохимической защиты от коррозии получают системой мониторинга, в которой необходимые работы выполняются буксируемыми и телеуправляемыми подводными аппаратами, действующими с борта специализированного судна /3- Manley J. E. et al. Aquanaut: A New Tool for Subsea Inspection and Intervention //OCEANS 2018 MTS/IEEE Charleston. - IEEE, 2018. - С. 1-4/. При этом буксируемые аппараты оборудованы средствами технического зрения и применяются при работе на площадке ПДК, а телеуправляемые - средствами технического зрения и средствами для выполнения контактных операций - на компактных объектах с использованием супервизорного управления с борта судна.
Однако такая система мониторинга оказывается экономически неэффективной из-за необходимости привлечения дорогостоящего обеспечивающего судна, больших разрывов по времени по контролю состояния объектов ПДК, и полностью исключает возможность мониторинга в районах со сложными природно-климатическими условиями например при наличии ледового покрытия.
От названных недостатков свободна известная система, в которую для мониторинга ПДК введен автономный необитаемый подводный аппарат (АНПА) с подводным базированием /4- патент RU 2 653 614C1 МПК F17D 5/02(2006.01) F17D 5/06(2006.01) G01M 3/38(2006.01) G01D 5/353(2006.01)/. Эта система мониторинга подводного добычного комплекса, состоит из автономного необитаемого подводного аппарата, донного причального устройства (ДПУ), комплекта модулей автономных датчиков (МАД), подводного кабеля, связывающего оборудование с береговой аппаратурой обработки и дистанционного питания. При этом модули автономных датчиков содержат датчики вибрации, датчики определения вертикали к поверхности земли, датчики температуры, датчик катодного потенциала, ультразвуковой толщиномер, датчик утечки продукта, датчик утечки моноэтиленгликоля и размещены на инспектируемых объектах ПДК и оснащены средствами передачи накапливаемых данных по подводной радиосвязи. АНПА, размещаемый на борту стационарного ДПУ, осуществляет на площадке ПДК периодические запрограммированные миссии по сбору информации, на основании которой принимаются решения о состоянии ПДК. Сбор информации включает обход установленных датчиков и считывание накопленных на них данных по каналу подводной радиосвязи и выполнение бесконтактных операций по формированию акустических изображений объектов с использованием системы технического зрения, скомплектованной бортовыми приборами в составе акустического профилографа, электромагнитного искателя, цифровой фотосистемы высокого разрешения, видеосистемы, многолучевого эхолота и гидролокатора бокового обзора. АНПА стартует от ДПУ, выполняет заданную программу миссии, затем осуществляет подход и стыковку с ДПУ. ДПУ используется для длительного подводного базирования АНПА, для чего оснащен средствами для бесконтактного заряда аккумуляторных батарей, передачи собранных данных на береговой пункт управления и получения заданий для новых миссий из берегового пункта. Для обеспечения этих работ на борту ДПУ АНПА оборудован соответствующими системами для бесконтактного заряда аккумуляторных батарей и информационного обмена.
Эта система наиболее близка к заявляемой и принята за прототип.
Недостатком в известной системы является отсутствие технических средств обеспечивающих в целом решение задач мониторинга, необходимых для формирования объективной картины технического состояния ПДК. Применение АНПА на объектах ограничено сбором данных от МАД, выполнением бесконтактных операций по формированию акустических изображений компактных объектов с использованием предложенной системы технического зрения. В известной системе мониторинга нет возможностей и средств для выполнения бесконтактных операций по протяженным объектам и по площадке ПДК, нет точной навигационной привязки при обследовании объектов на большой площади и протяженных объектов. Кроме того, в системе нет средств, обеспечивающих прецизионную навигацию АНПА при его выходе к датчикам для считывания данных накапливаемых МАД по каналу подводной радиосвязи (уверенно работающей только при удержании точек приема и передачи (АНПА и МАД) на дистанциях до одного метра). Также важнейшим недостатком системы является невозможность выполнения широкого круга контактных операций на объектах из-за отсутствия необходимого оборудования и средств высокоскоростной связи с береговым пунктом управления на борту АНПА для обеспечения супервизорного управления.
В основу заявляемого изобретения поставлена задача исключить указанные недостатки, расширить объем данных для контроля технического состояния ПДК и тем самым повысить достоверность информации необходимой для получения объективной картины технического состояния ПДК и своевременного принятия необходимых профилактик на объектах ПДК, предупреждения возможных утечек продуктов добычи и предотвращения экологического загрязнения среды.
Поставленная задача решается тем, что система мониторинга подводного добычного комплекса,
содержащая береговой пункт управления с аппаратурой обработки, регистрации и дистанционного питания, автономный необитаемый подводный аппарат (АНПА), донное причальное устройство (ДПУ), установленное на одном из объектов подводного добычного комплекса, подводный кабель, связывающий ДПУ с береговым пунктом управления, и комплект модулей автономных датчиков (МАД),
в которой АНПА, оборудован комплектом бортовых приборов технического зрения в составе акустического профилографа, электромагнитного искателя, цифровой фотосистемы высокого разрешения, видеосистемы, многолучевого эхолота, гидролокатора бокового обзора, а также средствами приема данных и управления МАД, приемной аппаратурой для бесконтактного заряда аккумуляторных батарей и бесконтактными средствами информационного обмена. АНПА осуществляет на площадке размещения ПДК периодические запрограммированные миссии по текущему контролю его объектов с использованием системы технического зрения и установленных датчиков, стартует для выполнения миссии, выполняет подход и стыковку с ДПУ, используемому для длительного подводного базирования и оснащенного средствами для бфесконтактного заряда аккумуляторных батарей, передачи собранных данных на береговой пункт управления и получения заданий для новых миссий из берегового пункта.
В этой системе АНПА дополнительно оснащен бортовыми приборами в составе манипулятора, щетки для чистки поверхностей, пробоотборника, ультразвукового толщиномера и измерителя катодного потенциала,
а сама система дополнена маяками навигационно-информационной поддержки, установленными на каждом инспектируемом объекте ПДК, соединенными линиями связи с береговым постом управления, и состоящими из средств высокочастотной гидроакустической и оптической связи, а также тремя автономными низкочастотными гидроакустическими излучателями, размещенными на площадке ПДК в точках с известными координатами и излучающими синхронные навигационные сигналы, при этом АНПА оборудован аналогичными средствами высокочастотной гидроакустической и оптической связи для двухстороннего информационного обмена с этими маяками и средствами приема и обработки низкочастотных навигационных сигналов.
Сопоставительный анализ существенных признаков заявленной системы и ее прототипа показывает, что первая в отличие от прототипа имеет следующие отличительные признаки:
1. АНПА дооборудован бортовыми приборами в составе манипулятора, щетки для чистки поверхностей, пробоотборника, ультразвукового толщиномера и измерителя катодного потенциала для выполнения контактных операций на инспектируемых объектах ПДК.
2. Система мониторинга дополнена маяками навигационно-информационной поддержки, установленными на каждом инспектируемом объекте ПДК, соединенными линиями связи с береговым постом управления, и состоящими из средств высокочастотной гидроакустической и оптической связи.
3. Система мониторинга дополнена тремя автономными низкочастотными гидроакустическими излучателями, размещенными на площадке ПДК в точках с известными координатами и излучающими синхронные навигационные сигналы.
4. АНПА оборудован средствами высокочастотной гидроакустической и оптической связи для двухстороннего информационного обмена с маяками навигационно-информационной поддержки и средствами приема и обработки навигационных сигналов от автономных низкочастотных гидроакустических излучателей.
Указанные существенные признаки, отличающие заявленное устройство от прототипа, в совокупности с признаками, общими для него и прототипа, обеспечивают достижение заявленного технического результата во всех случаях, на которые распространяется объем правовой охраны.
Признак: «АНПА дооборудован бортовыми приборами в составе манипулятора, щетки для чистки поверхностей, пробоотборника, ультразвукового толщиномера и измерителя катодного потенциала» - обеспечивает резкое расширение функциональных возможностей АНПА, который при наличии перечисленных инструментов, с учетом сформированных средств связи с береговым постом управления, становится телеуправляемым .
Признак: «система...дополнена маяками навигационно-информационной поддержки, установленными на каждом инспектируемом объекте ПДК, соединенными линиями связи с береговым постом управления, и состоящими из средств высокочастотной гидроакустической и оптической связи» - обеспечивает точную навигацию и супервизорное управление при выполнении контактных операций автономным необитаемым подводным аппаратом на объектах ПДК.
Признак: «Система мониторинга дополнена тремя автономными низкочастотными гидроакустическими излучателями, размещенными на площадке ПДК в точках с известными координатами и излучающими синхронные навигационные сигналы» - обеспечивает точную навигацию АНПА по всей площадке ПДК, повышая достоверность и точность работ по контролю его протяженных объектов, контролю подводной среды и контролю состояния площадки, на которой размещен ПДК.
Признак: «АНПА оборудован средствами высокочастотной гидроакустической и оптической связи для двухстороннего информационного обмена с маяками навигационно-информационной поддержки и средствами приема и обработки навигационных сигналов от автономных низкочастотных гидроакустических излучателей.» - обеспечивает применение АНПА, в навигационном пространстве, сформированном маяками навигационно-информационной поддержки и тремя автономными низкочастотными гидроакустическими излучателями.
Таким образом, существенные признаки заявленной системы мониторинга подводного добычного комплекса обеспечивают достижение технического результата, т.е. находятся с техническим результатом в причинно-следственной связи и решают поставленную задачу.
Сущность изобретения поясняется чертежом, где представлена структурная схема системы мониторинга подводного добычного комплекса.
Система работает следующим образом. Площадка, на которой размещены объекты ПДК, содержит ряд компактных объектов типа манифольдов 1, 2, 3 и протяженных линейных объектов типа трубопроводов или шлангокабельных линий 4, 5. На площадке установлен ДПУ 6, а объекты соединены кабелем связи 7 через информационные сети ПДК с береговым пунктом, в котором размещена аппаратура управления и электропитания 8. Также в фиксированных точках протяженных или компактных объектов установлены модули автономных датчиков 9 и маяки навигационно-информационной поддержки 10 на каждом инспектируемом объекте. Работы по мониторингу выполняет АНПА 11, оборудованный расширенным составом измерительного оборудования и средствами для приема сигналов гидроакустической навигационной системы, сформированной тремя автономными низкочастотными гидроакустическими излучателями 12 для точной навигации при по всему району ПДК и средствами для приема и излучения сигналов связи по гидроакустическому и оптическому каналам. АНПА базируется на ДПУ, где выполняется заряд его аккумуляторных батарей бесконтактными средствами, диагностика его состояния, получение заданий на новую миссию, передача накопленных данных в береговой пункт управления с использованием средств бесконтактного информационного обмена.
Задачи мониторинга решаются следующим образом. АНПА, получив программу-задание, переходит в автоматическом режиме управления к компактному объекту инспекции, заданному его географическими координатами, или движется по трассе размещения протяженного объекта между его точками, заданными географическими координатами, или обследует заданный район площадки ПДК, определяя свое местоположение решением триангуляционной задачи по дальномерным данным формируемым при приеме навигационных сигналов от трех автономных низкочастотных гидроакустическими излучателей. Возможности реализации точной гидроакустической навигации объекта, при приеме им сложных низкочастотных сигналов известны / 5-[Патент РФ 2469346 МПК G01S 3/80 от10.12.2012, опубл. 10.12.2012г.]. При перемещении АНПА выполняет заданные бесконтактные операции по площадке, протяженным или компактным объектам ПДК или выполняет обход объектов, где установлены МАД с точной координатной привязкой получаемой информации. Выход АНПА к инспектируемым объектам, на которых необходимо выполнить контактные операции или считать накопленные данные МАД, обеспечивается в два этапа . На первом, в дальней зоне размер которой может совпадать с размерами площадки ПДК, навигация поддерживается тремя автономными низкочастотными гидроакустическими излучателями, второй этап в ближней зоне (фактически на самом объекте и окрестности радиусом несколько десятков метров) обеспечивается маяками навигационно-информационной поддержки. Эти маяки, установленные на каждом инспектируемом объекте ПДК, соединены линиями связи с береговым постом управления через информационные сети ПДК, и состоят из средств гидроакустической и оптической связи. С установлением информационного обмена между АНПА и этими маяками формируется канал супервизорного управления автономным аппаратом из берегового пункта, что фактически делает его телеуправляемым. Для этого используется средства высокочастотной гидроакустической связи с дальностью действия несколько десятков метров и оптические средства связи с дальностью действия несколько метров /6-Bluecomm 100 - Wireless underwater optical communication.-URL: https://www.sonardyne.com/product/bluecomm-underwater-optical-communication-system/#requestInformation (дата обращения: 15.09.2020)/.
При супервизорном управлении можно выполнить прецизионное маневрирование при выходе АНПА к точкам объекта для контактных операций, к МАД для считывания данных. Наличие маяков обеспечивает участие оператора в управлении движением и оборудованием АНПА при контактных операциях по чистке объектов от обрастаний, перемещению запорных арматур, ультразвуковому контролю толщин, взятию проб продуктов и среды, измерению параметров и замене элементов электрохимической защиты от коррозии.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ навигационно-информационной поддержки автономного необитаемого подводного аппарата, выполняющего мониторинг подводного добычного комплекса | 2021 |
|
RU2756668C1 |
| Система мониторинга подводного добычного комплекса | 2017 |
|
RU2653614C1 |
| СИСТЕМА ПРИВЕДЕНИЯ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА К ДОННОМУ ПРИЧАЛЬНОМУ УСТРОЙСТВУ | 2020 |
|
RU2750550C1 |
| Способ навигационно-информационной поддержки глубоководного автономного необитаемого подводного аппарата | 2018 |
|
RU2689281C1 |
| Способ навигационно-информационной поддержки автономного необитаемого подводного аппарата большой автономности, совершающего протяженный подводный переход | 2018 |
|
RU2687844C1 |
| СИСТЕМА БЕЗОПАСНОСТИ ОБЪЕКТА В ОТКРЫТОЙ АКВАТОРИИ | 2017 |
|
RU2650798C1 |
| Способ позиционирования самоходного необитаемого подводного аппарата, выполняющего мониторинг подводной акватории | 2022 |
|
RU2794555C1 |
| КОНТРОЛИРУЕМЫЙ МОБИЛЬНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК | 2021 |
|
RU2766365C1 |
| Способ навигационной поддержки группы специализированных подводных аппаратов, выполняющих общую миссию в мелководной акватории | 2023 |
|
RU2819199C1 |
| СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА И КОНТРОЛЯ В НЕМ АКУСТИЧЕСКИХ ОБЪЕКТОВ | 2023 |
|
RU2806775C1 |
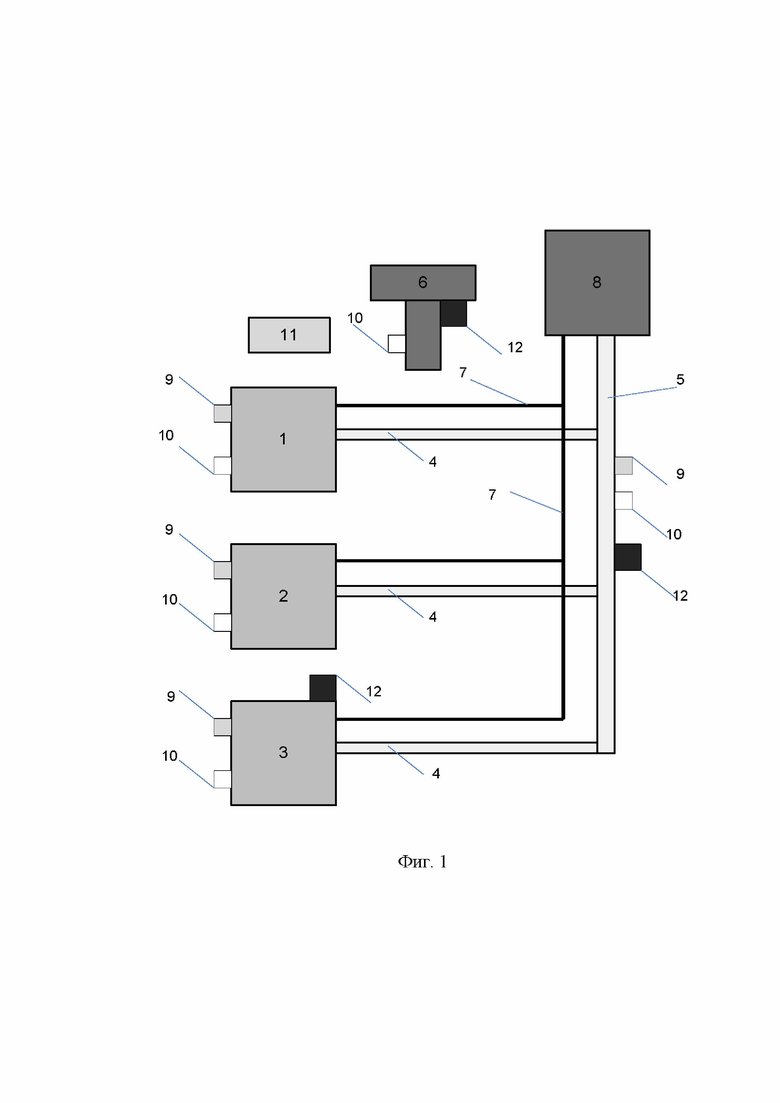
Изобретение относится к роботизированным средствам контроля подводной инфраструктуры, в частности средствам контроля подводных добычных комплексов (ПДК). Сущность: система содержит береговой пункт (8) управления с аппаратурой обработки, регистрации и дистанционного питания; автономный необитаемый подводный аппарат (11) (АНПА); донное причальное устройство (6), установленное на одном из объектов ПДК и связанное с береговым пунктом (8) управления посредством подводного кабеля; комплект модулей (9) автономных датчиков; контактные маяки (10) навигационно-информационной поддержки, состоящие из средств высокочастотной гидроакустической и оптической связи, установленные на каждом инспектируемом объекте ПДК и соединенные линиями связи с береговым пунктом (8) управления; автономные гидроакустические излучатели (12) синхронных навигационных сигналов в составе трех единиц, размещенные на площадке ПДК в точках с известными координатами. АНПА (11) оборудован комплектом бортовых приборов технического зрения в составе акустического профилографа, электромагнитного искателя, цифровой фотосистемы высокого разрешения, видеосистемы, многолучевого эхолота, гидролокатора бокового обзора; средствами приема данных и управления модулями (9) автономных датчиков, приемной аппаратурой для бесконтактного заряда аккумуляторных батарей, бесконтактными средствами информационного обмена, бортовыми приборами для выполнения контактных операций в составе манипулятора, щетки для чистки поверхностей, пробоотборника, ультразвукового толщиномера, измерителя катодного потенциала, а также средствами высокочастотной гидроакустической и оптической связи для двухстороннего информационного обмена с маяками (10) и средствами для приема низкочастотных навигационных сигналов. Технический результат: повышение достоверности результатов мониторинга за счет расширения объема контролируемых параметров. 1 ил.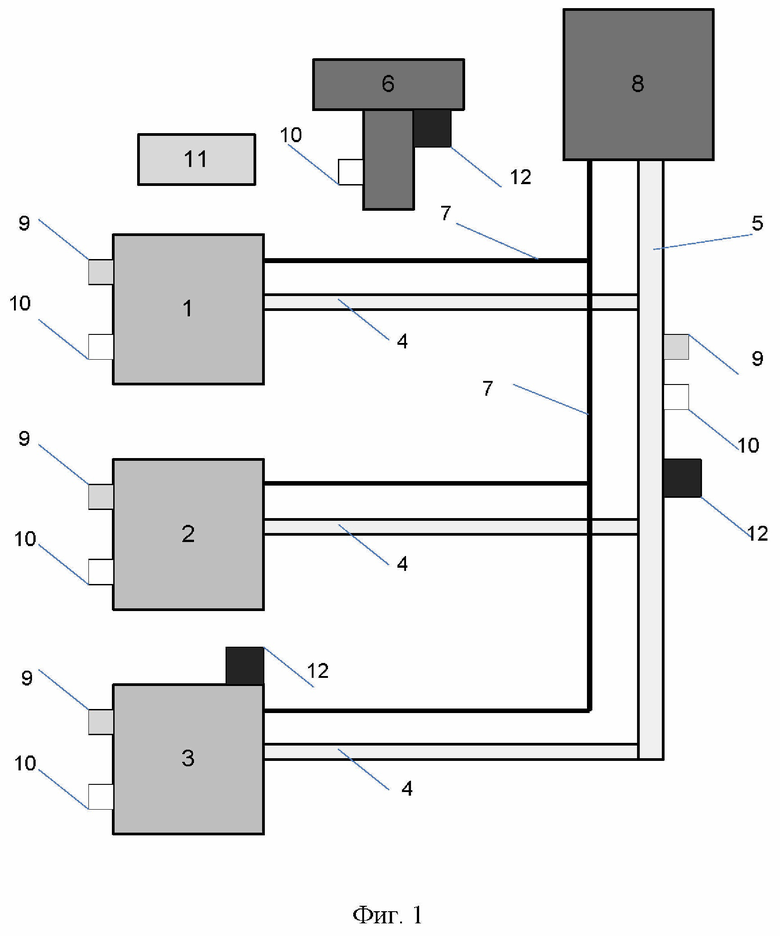
Система мониторинга подводного добычного комплекса (ПДК), содержащая береговой пункт управления с аппаратурой обработки, регистрации и дистанционного питания, автономный необитаемый подводный аппарат (АНПА), донное причальное устройство (ДПУ), установленное на одном из объектов подводного добычного комплекса, подводный кабель, связывающий ДПУ с береговым пунктом управления, и комплект модулей автономных датчиков (МАД), в которой АНПА, оборудованный комплектом бортовых приборов технического зрения в составе акустического профилографа, электромагнитного искателя, цифровой фотосистемы высокого разрешения, видеосистемы, многолучевого эхолота, гидролокатора бокового обзора, а также средствами приема данных и управления МАД, приемной аппаратурой для бесконтактного заряда аккумуляторных батарей и бесконтактными средствами информационного обмена, осуществляет на площадке размещения ПДК периодические запрограммированные миссии по текущему контролю его объектов с использованием системы технического зрения и установленных датчиков, стартует от ДПУ для выполнения миссии, выполняет подход и стыковку с ДПУ, используемым для длительного подводного базирования и оснащенным средствами для бесконтактного заряда аккумуляторных батарей, передачи собранных данных на береговой пункт управления и получения заданий для новых миссий из берегового пункта, отличающаяся тем, что дополнительно АНПА оснащен бортовыми приборами в составе манипулятора, щетки для чистки поверхностей, пробоотборника, ультразвукового толщиномера и измерителя катодного потенциала, а система дополнена маяками навигационно-информационной поддержки, установленными на каждом инспектируемом объекте ПДК, соединенными линиями связи с береговым постом управления и состоящими из средств высокочастотной гидроакустической и оптической связи, а также тремя автономными низкочастотными гидроакустическими излучателями, размещенными на площадке ПДК в точках с известными координатами и излучающими синхронные навигационные сигналы, при этом АНПА оборудован аналогичными средствами высокочастотной гидроакустической и оптической связи для двухстороннего информационного обмена с этими маяками и средствами приема и обработки низкочастотных навигационных сигналов.
| Ю.В.Матвиенко и др | |||
| Развитие технологического потенциала автономных необитаемых подводных аппаратов / Подводные исследования и робототехника, 2020, N4(34), стр.4-14 | |||
| Система мониторинга подводного добычного комплекса | 2017 |
|
RU2653614C1 |
| Ю.В.Матвиенко и др | |||
| Концепция создания роботизированного комплекса обследования и мониторинга технического состояния объектов подводной добычи / | |||

