Изобретение относится к способам навигационного оборудования морских районов, применяемым для обеспечения безопасности кораблевождения и судовождения, а также для контроля действий в районе акустических объектов - подводных и надводных плавсредств.
Известно, что навигационное оборудование морских районов обеспечивает в них безопасность кораблевождения (судовождения) и служит для определения координат кораблей и судов в море, а также для их правильной ориентировки при плавании в прибрежных и мелководных районах. Оно представляет собой систему специальных береговых и плавучих сооружений, конструкций и устройств, включающих береговые и плавучие маяки, светящиеся и несветящиеся знаки, навигационные огни, плавучие предостерегающие знаки (буи и вехи), радио-, радиолокационные и гидроакустические маяки, наземные станции радионавигационных систем и другие средства [1 - Навигационное оборудование. Военно-морской словарь / Гл. ред. В.Н. Чернавин. М.: Воениздат, 1989. - 511 с. С.265].
Большая часть средств навигационного оборудования устанавливается на берегу или на поверхности воды и служит для обеспечения навигационной информацией надводных плавсредств. Обеспечение же подводных плавсредств (подводных лодок и подводных аппаратов) навигационными данными является наиболее сложной задачей. Для них нашли широкое применение гидроакустические маяки (ГАМ) и гидроакустические буи-маяки (ГАБМ).
Известны донные ГАМ и всплывающие донные ГАМ, применяемые практически во всех районах Мирового океана. Дальность их действия достигает 20-25 км, а глубина постановки 6000 м [2 - И.С. Калинский. Навигационное оборудование морских театров. Л.: ВВМКУ им. М.В. Фрунзе, 1980. - 428 с, с. 292]. Донные ГАМ являются одноразовыми, а всплывающие ГАМ - многоразовыми, так как имеют всплывающую часть с антенной и контейнером с электронной аппаратурой, якорь и узел крепления всплывающей части с резаком и пиропатроном.
Продолжительность работы донных ГАМ ограничивается временем действия источников тока и составляет 10-30 суток [3 - И.С. Калинский. Навигационное оборудование морских театров. Л.: ВВМКУ им. М.В. Фрунзе, 1980. - 428 с, с. 305-306].
Известна мобильная подводная система навигации и связи «Позиционер», включающая пункт управления и связанные с ним автономный необитаемый подводный аппарат (АНПА) и гидроакустический буй-маяк (ГАБМ) с аппаратурой спутниковой связи и навигации. Навигационная информация передается на надводные и подводные плавсредства от маневрирующего в заданном морском районе АНПА, который периодически обновляет ее у ГАБМ по звукоподводной связи. ГАБМ имеет аппаратную часть, систему электропитания, радио- и гидроакустическую аппаратуру, включающую радиостанцию УКВ, приемник ГЛОНАСС, комплект системы спутниковой связи и аппаратуру подводной связи. ГАБМ выполняются в трех вариантах: донном, плавающем и вмораживаемым в лед. [4 - Д. Литовкин, А. Рамм. В России создан подводный ГЛОНАСС. М.: Известия IZ, 08.12.2016, https//iz.ru/news/650211].
Известен мобильный гидроакустический буй-маяк, представляющий собой АНПА с отсеком для ГАБМ. ГАБМ имеет источник тока, аппаратуру управления, приемник спутниковой системы навигации ГЛОНАСС, поплавок с антенной и аппаратурой гидроакустической связи. [5 - Мобильный гидроакустический буй-маяк и способ навигационного оборудования морского района / А.В. Иванов, А.В. Новиков. Патент на изобретение RU 2709058. М.: ФИПС, 2019. Бюл.№35].
В качестве прототипа изобретения рассматривается способ навигационного оборудования морского района с применением мобильного ГАБМ, при котором:
- вводят маршрутное задание в бортовую систему управления АНПА - носителя ГАБМ и выпускают его на маршрут,
- по прибытии в назначенную точку погружают АНПА с ГАБМ на заданную глубину,
- отделяют поплавок ГАБМ с антенной, разматывают с катушки соединяющий кабель и поднимают его на поверхность,
- принимают от спутника координаты и передают их по кабелю в аппаратуру управления ГАБМ,
- принимают балласт и укладывают АНПА с ГАБМ на грунт, с помощью вытравленного кабеля регулируют высоту поплавка с антенной и аппаратурой гидроакустической связи,
- по длине вытравленного кабеля и данным от датчиков давления в вычислительном устройстве ГАБМ рассчитывают его истинные географические координаты, при этом гидростатический датчик используют для расчета глубины места, а гидродинамический - для определения величины сноса течением,
- переводят ГАБМ в дежурный режим,
- с получением аппаратурой гидроакустической связи ГАБМ запроса подводного или надводного объекта о выдаче навигационной информации, устанавливают его принадлежность с помощью устройства опознавания «свой-чужой» и в зашифрованной форме передают требуемые данные на «свой» объект,
- при необходимости перебазируют мобильный ГАБМ, для чего направляют в район его нахождения плавсредство, с которого по гидроакустической связи передают соответствующую команду, выбирают кабель с поплавком ГАБМ на борт АНПА, запускают движитель, отрывают АНПА от грунта и переводят его в новый район или возвращают в пункт базирования [5 - Мобильный гидроакустический буй-маяк и способ навигационного оборудования морского района / А.В. Иванов, А.В. Новиков. Патент на изобретение RU 2709058. М.: ФИПС, 2019. Бюл.№35].
Рассмотренный способ навигационного оборудования морского района с применением мобильного ГАБМ позволяет оперативно и скрытно оснащать заданный район средствами навигации и обеспечивать безопасность плавания своих надводных и подводных плавсредств, меняя при необходимости их дислокацию. Однако он имеет следующие недостатки:
- способ не может быть реализован в случае присасывания мобильного ГАБМ к грунту, имеющему повышенную вязкость, а также при заиливании корпуса, что создает препятствия для перебазирования ГАБМ;
- способ не обеспечивает оперативную связь пункта управления с ГАБМ, а также контроль пунктом управления работоспособности ГАБМ.
Известен способ контроля подводной среды в морском районе с применением радиогидроакустических буев (РГБ), при котором РГБ сбрасывают в море корабли или летательные аппараты с целью получения данных о подводной обстановке акустическими методами с последующей передачей их по радиоканалу на приемное устройство, расположенное на летательном аппарате, корабле или береговом посту [6 - Радиогидроакустический буй. Военно-морской словарь/Гл. ред. В.Н. Чернавин. М.: Воениздат, 1989. - 511 с. С.352]. Недостатком способа является небольшая продолжительность функционирования РГБ, ограниченная временем работы его источника тока, отсутствие в передаваемой РГБ информации данных о его координатах и, как следствие, применение РГБ ограничено пределами видимого горизонта.
Целью изобретения является разработка способа навигационного оборудования морского района, позволяющего оперативно и скрытно оснащать его средствами навигации, поддерживать с ними связь, осуществлять контроль их работоспособности, перебазировать в другой район или возвращать на базу, а также контролировать действия в районе акустических объектов - подводных и надводных плавсредств.
Для реализации способа предлагается использовать контролируемый мобильный гидроакустический буй-маяк (КМ ГАБМ), который дополнительно оснащается акустическим профилографом, служащим для поиска подходящей площадки с твердым грунтом, отдельным поплавком с антенной для связи с пунктом управления и спутниками, аппаратурой контроля работоспособности бортового оборудования, а также гидрофоном и запоминающим устройством для мониторинга водной среды [7 - Контролируемый мобильный гидроакустический буй-маяк. Патент на изобретение RU 2766365 /А.В. Новиков, Д.А. Егоров, В.В. Чикин. М.: ФИПС, 2022. Бюл. №8, 14 с.].
Для достижения цели изобретения предлагается способ навигационного оборудования морского района и контроля действий в районе акустических объектов, включающий:
применение мобильного гидроакустического буя-маяка,
ввод в его бортовую систему управления маршрутного задания и выпуск его в море,
погружение мобильного гидроакустического буя-маяка на заданную глубину по прибытии в назначенную точку,
отделение от корпуса буя-маяка поплавка с антенной и подъем его на поверхность путем разматывания с катушки кабеля, соединяющего поплавок с корпусом буя-маяка,
установление сеанса связи буя-маяка с навигационным спутником, прием от него навигационной информации (широты и долготы) и передача ее по кабелю в аппаратуру управления маяка,
прием в балластный отсек буя-маяка воды и покладка его на грунт,
расчет в вычислительном устройстве буя-маяка своих истинных географических координат по расчетным данным скорости горизонтального перемещения и глубины погружения, измеряемых датчиками гидродинамического и гидростатического давления,
перевод гидроакустического буя-маяка в режим наблюдения, заключающийся в прослушивании окружающего пространства гидрофонами буя,
включение аппаратуры буя-маяка в режим передачи навигационной информации после получения шифрованного акустического сигнала-запроса от плавсредства, являющегося «своим», и передача ему акустического сигнала-ответа с данными о своей широте, долготе и глубине,
перебазирование мобильного гидроакустического буя-маяка по команде с пункта управления, включающее продувку балластного отсека, отрыв от грунта, запуск движителя и переход в новый район или в пункт базирования, отличающийся тем, что
применяют контролируемый мобильный гидроакустический буй-маяк,
перед укладкой его на грунт дополнительно с помощью профилографа выбирают площадку с подходящим по качеству грунтом,
обеспечивают требуемый режим связи с пунктом управления через авиационный или космический ретранслятор с помощью поплавка с антенной, который поднимают на поверхность или заглубляют с помощью кабеля, намотанного на катушку, и ее привода,
осуществляют контроль подводного пространства в режиме наблюдения с записью шумов в запоминающем устройстве, данные контроля передают на пункт управления при очередном сеансе связи,
для перебазирования контролируемого мобильного гидроакустического буя-маяка убирают буй с гидрофонами, а также кабель с поплавком и антенной внутрь корпуса.
Связь КМ ГАБМ с пунктом управления осуществляют по радиоканалу с использованием поплавка с антенной связи, который с помощью управляющего устройства, привода и катушки с кабелем поднимают на поверхность воды, где и устанавливают радиосвязь с пунктом управления или ретранслятором, в качестве которого используют береговые и надводные средства, а также космические и летательные аппараты.
Наличие канала связи с пунктом управления позволяет поддерживать требуемый режим связи с ним, оперативно передавать данные контроля водного пространства в районе постановки КМ ГАБМ, информацию о его техническом состоянии и команды для передислокации или изменения режима работы, например, выборке на борт поплавка с антенной связи и временного отключения в случае опасности.
Сущность изобретения поясняется чертежами (фиг. 1-4), на которых представлены:
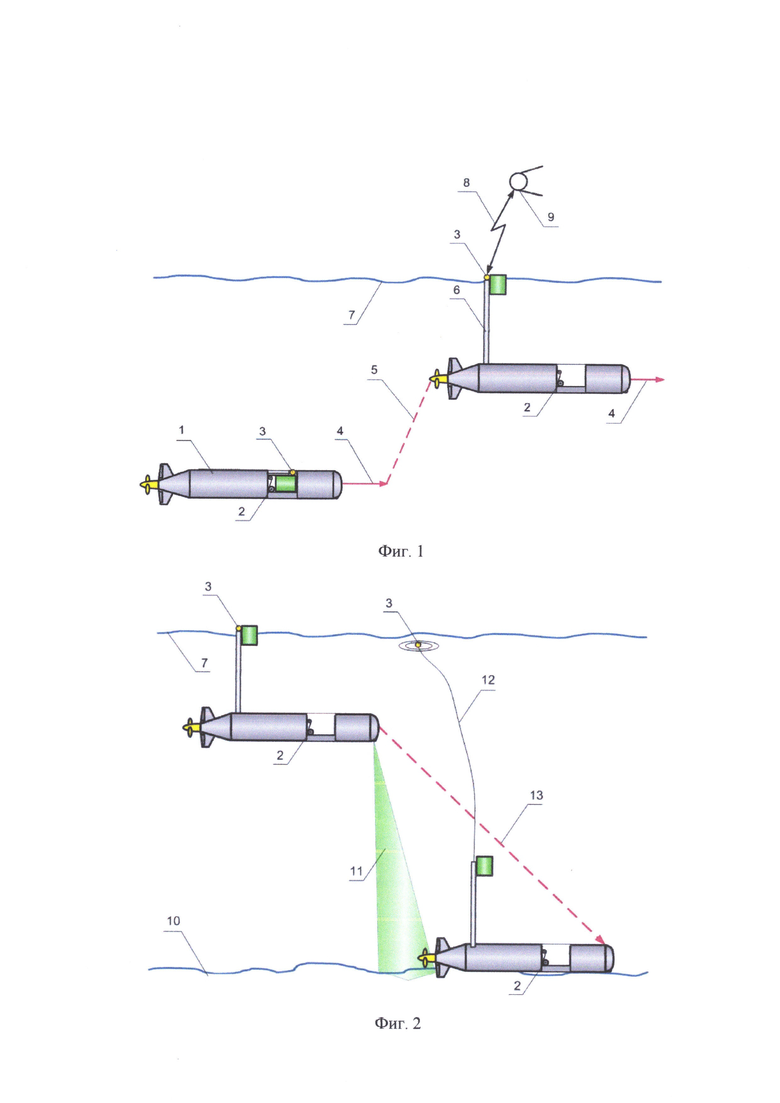
фиг. 1 - всплытие КМ ГАБМ на поверхность для связи с навигационным спутником и получения своих координат;
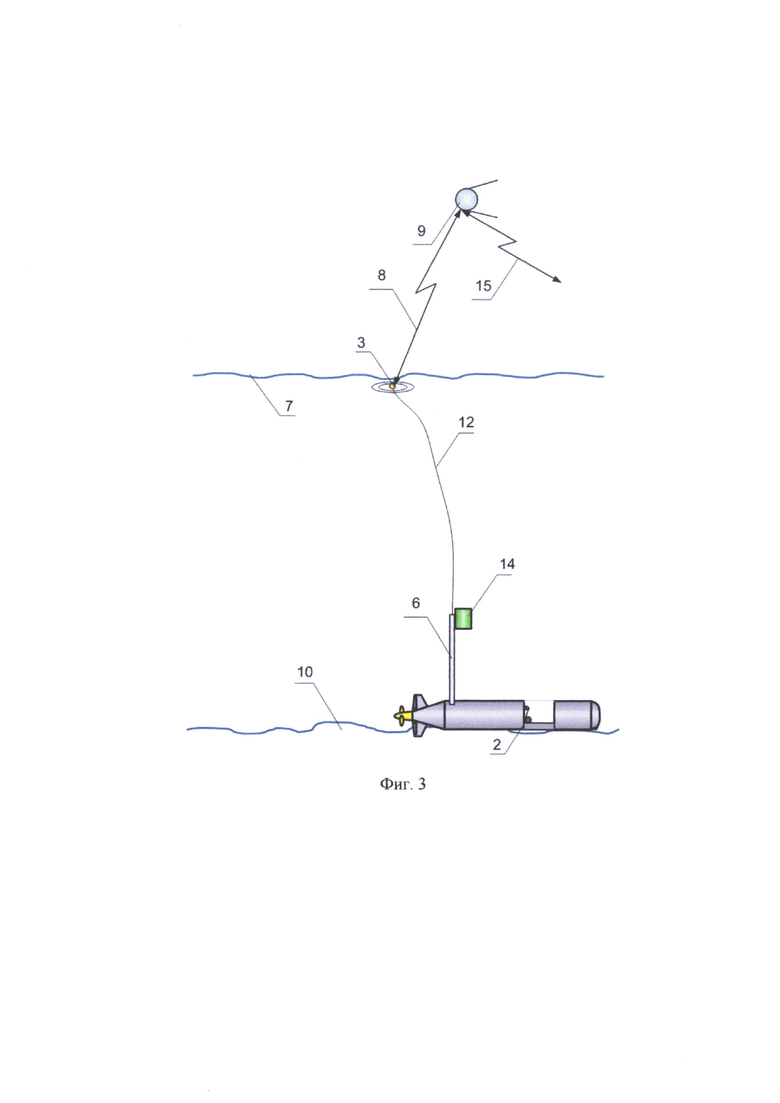
фиг. 2 - получение от спутника координат КМ ГАБМ, поиск подходящей площадки для покладки на грунт и покладка на грунт;
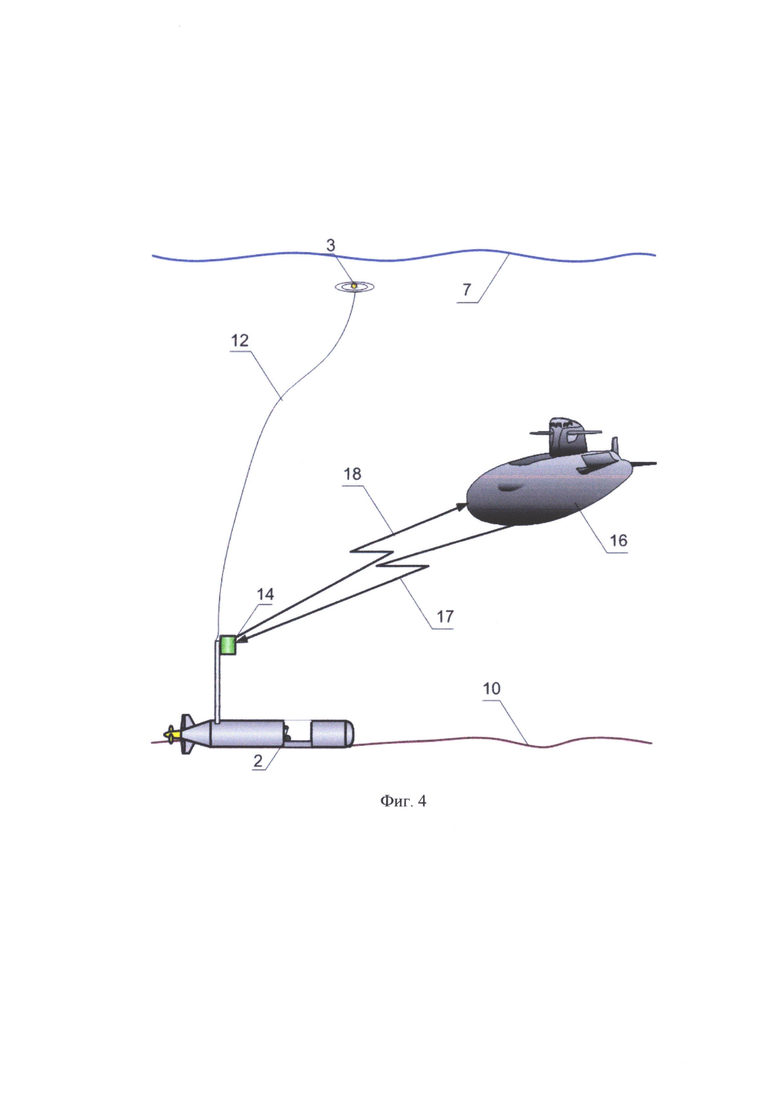
фиг. 3 - подъем на поверхность поплавка с антенной связи и перевод КМ ГАБМ в режим наблюдения;
фиг. 4 - взаимодействие КМ ГАБМ с подводным плавсредством и передача по его запросу своих координат и глубины погружения.
Цифрами обозначены:
1 - КМ ГАБМ, 2 - катушка с кабелем и приводом, 3 - поплавок с антенной связи спутниковой системы навигации, 4 - вектор горизонтального движения КМ ГАБМ, 5 - всплытие КМ ГАБМ для уточнения своих координат, 6 - труба (кабель-канал), 7 - поверхность моря, 8 - линия радиосвязи между поплавком с антенной КМ ГАБМ, пунктом управления и космическим аппаратом, получение координат от навигационного спутника, 9 - навигационный космический аппарат (ретранслятор), 10 - морское дно, 11 - обследование поверхности дна акустическим профилографом, 12 - кабель, 13 - погружение КМ ГАБМ, 14 - буй с гидрофонами и аппаратурой приема и передачи гидроакустических сигналов, 15 - линия радиосвязи между космическим аппаратом-ретранслятором и пунктом управления, 16 - подводное плавсредство, 17 - запрос подводного плавсредства, 18 - передача навигационной информации на плавсредство.
Техническим результатом изобретения является способ навигационного оборудования морского района, позволяющий оперативно и скрытно оборудовать его навигационными средствами для обеспечения в районе действий своих надводных и подводных плавсредств, контролировать их работоспособность, осуществлять в районе дистанционный контроль подводного пространства, при необходимости отключать навигационные средства, а также перебазировать их в другой район или возвращать на базу.
Источники информации
1. Навигационное оборудование. Военно-морской словарь / Гл. ред. В.Н. Чернавин. М.: Воениздат, 1989. - 511 с. С.265.
2. И.С. Калинский. Навигационное оборудование морских театров. Л.: ВВМКУ им. М.В. Фрунзе, 1980. - 428 с, с. 292.
3. И.С. Калинский. Навигационное оборудование морских театров. Л.: ВВМКУ им. М.В. Фрунзе, 1980. - 428 с., с. 305-306.
4. Д. Литовкин, А. Рамм. В России создан подводный ГЛОНАСС. М.: Известия IZ, 08.12.2016, https//iz.ru/news/650211.
5. Мобильный гидроакустический буй-маяк и способ навигационного оборудования морского района / А.В. Иванов, А.В. Новиков. Патент на изобретение RU 2709058. М.: ФИПС, 2019. Бюл.№35.
6. Радиогидроакустический буй. Военно-морской словарь /Гл. ред. В.Н. Чернавин. М.: Воениздат, 1989. - 511 с. С.352.
7. Контролируемый мобильный гидроакустический буй-маяк. Патент на изобретение RU 2766365 /А.В. Новиков, Д.А. Егоров, В.В. Чикин. М.: ФИПС, 2022. Бюл. №8. 14 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНТРОЛИРУЕМЫЙ МОБИЛЬНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК | 2021 |
|
RU2766365C1 |
| МОБИЛЬНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК И СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА | 2018 |
|
RU2709058C2 |
| САМОХОДНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК И СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА | 2018 |
|
RU2710831C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| СИСТЕМА ОХРАНЫ ВОДНОГО РАЙОНА | 2016 |
|
RU2659314C2 |
| АКУСТИЧЕСКИЙ РЕФЛЕКТОР МОБИЛЬНЫЙ | 2020 |
|
RU2755751C1 |
| ПОИСКОВЫЙ ПОДВОДНЫЙ АППАРАТ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2017 |
|
RU2650298C1 |
| СПОСОБ ОХРАНЫ ВОДНОГО РАЙОНА | 2016 |
|
RU2668494C2 |
| СИСТЕМА ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2016 |
|
RU2648546C1 |
| СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА И САМОХОДНЫЙ ПОДВОДНЫЙ АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2710791C1 |
Изобретение относится к способам навигационного оборудования морских районов, применяемым для обеспечения безопасности кораблевождения и судовождения, а также для контроля действий в районе акустических объектов - подводных и надводных плавсредств. Для навигационного оборудования морского района и контроля действий в районе акустических объектов применяют мобильный гидроакустический буй-маяк, ввод в его бортовую систему управления маршрутного задания и выпуск его в море, погружение мобильного гидроакустического буя-маяка на заданную глубину по прибытии в назначенную точку, отделение от корпуса буя-маяка поплавка с антенной и подъем его на поверхность путем разматывания с катушки кабеля, соединяющего поплавок с корпусом буя-маяка. Устанавливают сеанс связи буя-маяка с навигационным спутником, прием от него навигационной информации и передачу ее по кабелю в аппаратуру управления маяка. Расчет в вычислительном устройстве буя-маяка своих истинных географических координат по расчетным данным скорости горизонтального перемещения и глубины погружения, измеряемых датчиками гидродинамического и гидростатического давления, перевод гидроакустического буя-маяка в режим наблюдения, заключающийся в прослушивании окружающего пространства гидрофонами буя. Применяют контролируемый мобильный гидроакустический буй-маяк, перед укладкой его на грунт дополнительно с помощью профилографа выбирают площадку с подходящим по качеству грунтом. Обеспечивают требуемый режим связи с пунктом управления через авиационный или космический ретранслятор с помощью поплавка с антенной, который поднимают на поверхность или заглубляют с помощью кабеля, намотанного на катушку, и ее привода, осуществляют контроль подводного пространства в режиме наблюдения с записью шумов в запоминающем устройстве, данные контроля передают на пункт управления при очередном сеансе связи, для перебазирования контролируемого мобильного гидроакустического буя-маяка убирают буй с гидрофонами, а также кабель с поплавком и антенной внутрь корпуса. Достигается контроль работоспособности оборудования и дистанционный контроль подводного пространства. 4 ил.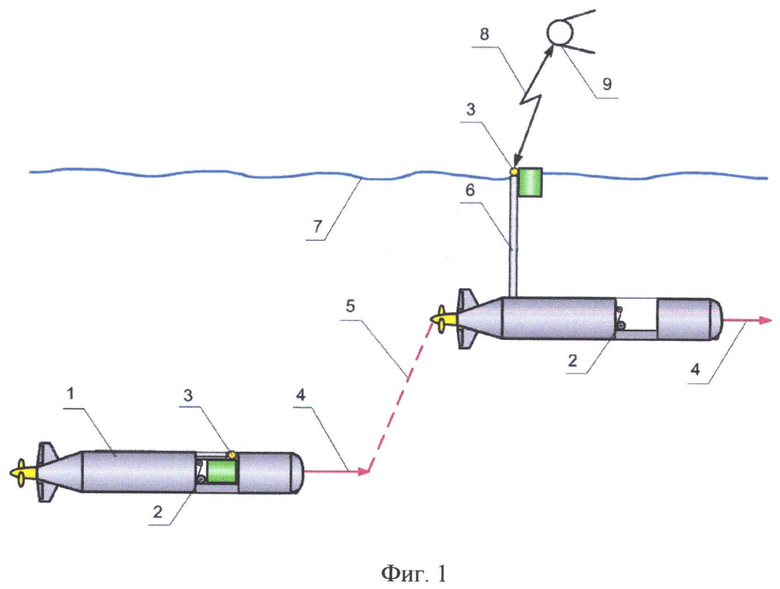
Способ навигационного оборудования морского района и контроля действий в районе акустических объектов, включающий применение мобильного гидроакустического буя-маяка, ввод в его бортовую систему управления маршрутного задания и выпуск его в море, погружение мобильного гидроакустического буя-маяка на заданную глубину по прибытии в назначенную точку, отделение от корпуса буя-маяка поплавка с антенной и подъем его на поверхность путем разматывания с катушки кабеля, соединяющего поплавок с корпусом буя-маяка, установление сеанса связи буя-маяка с навигационным спутником, прием от него навигационной информации - широты и долготы и передача ее по кабелю в аппаратуру управления маяка, прием в балластный отсек буя-маяка воды и покладка его на грунт, расчет в вычислительном устройстве буя-маяка своих истинных географических координат по расчетным данным скорости горизонтального перемещения и глубины погружения, измеряемых датчиками гидродинамического и гидростатического давления, перевод гидроакустического буя-маяка в режим наблюдения, заключающийся в прослушивании окружающего пространства гидрофонами буя, включение аппаратуры буя-маяка в режим передачи навигационной информации после получения шифрованного акустического сигнала-запроса от плавсредства, являющегося «своим», и передача ему акустического сигнала-ответа с данными о своей широте, долготе и глубине, перебазирование мобильного гидроакустического буя-маяка по команде с пункта управления, включающее отрыв от грунта, запуск движителя и переход в новый район или в пункт базирования, отличающийся тем, что применяют контролируемый мобильный гидроакустический буй-маяк, перед укладкой его на грунт дополнительно с помощью профилографа выбирают площадку с подходящим по качеству грунтом, обеспечивают требуемый режим связи с пунктом управления через авиационный или космический ретранслятор с помощью поплавка с антенной, который поднимают на поверхность или заглубляют с помощью кабеля, намотанного на катушку, и ее привода, осуществляют контроль подводного пространства в режиме наблюдения с записью шумов в запоминающем устройстве, данные контроля передают на пункт управления при очередном сеансе связи, для перебазирования контролируемого мобильного гидроакустического буя-маяка убирают буй с гидрофонами, а также кабель с поплавком и антенной внутрь корпуса.
| КОНТРОЛИРУЕМЫЙ МОБИЛЬНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК | 2021 |
|
RU2766365C1 |
| US 5331602 A1, 19.07.1994 | |||
| СПОСОБ НАВИГАЦИИ ПОДВОДНЫХ ОБЪЕКТОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2599902C1 |
| Способ навигационного оборудования морского района и самоходный подводный аппарат для его осуществления и арктическая подводная навигационная система для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания | 2021 |
|
RU2773538C1 |
| JP 2003127982 A, 08.05.2003. | |||
