Изобретение относится к подводной технике и в частности к технологиям создания средств навигации и информационного обмена для автономного необитаемого подводного аппарата (АНПА) с большой автономностью и дальностью действия, например при выполнении миссий подо льдом, в условиях отсутствия сопровождающего судна-носителя (ОС) и необходимости минимизации дополнительного внешнего навигационного оборудования.
Известен способ навигации и информационной поддержки для определения координат АНПА на его борту и параллельно в пункте управления, размещаемом на борту ОС, основанный на обработке гидроакустических дальномерных данных АНПА и судовой гидроакустической навигационной антенны относительно сети маяков-ответчиков, донных (Матвиенко Ю.В., Рылов Р.Н., Сидоренко А.В. Гидроакустические средства навигации и телеуправления для автономных необитаемых подводных аппаратов // Подводные технологии, 2005, №1, с. 20-27.) или поверхностных (S. Desset, R. Damus, J. Morash, С. Bechaz. Use of GIBs in AUVs for Underwater Archaeology. - Sea Technology, 2003, December, p. 22-27.). Способ реализуется в системах, называемых гидроакустическими навигационными системами с длинной базой.
Недостаток этих систем - ограничение района работ сетью маяков с небольшой дальностью действия.
Известен способ подводной навигации и информационного обмена, основанный на комплексной обработке данных от различных устройств, который позволяет реализовать информационный обмен, увеличить дальность действия и точность навигации за счет комплексирования данных бортовой навигационной системы и внешних гидроакустических навигационных систем (Агеев М.Д., Киселев Л.В., Матвиенко Ю.В. и др. Автономные подводные роботы. - М., Наука, 2005, 398 с.; М. Uliana, F. Andreucci, B. Papalia. The Navigation System of an Autonomous Vehicle for Antarctic Exploration. - Proceeding of MTSIEEE OCEANS-97).
Известный способ включает: счисление координат на борту аппарата, установку ряда автономных опорных маяков, координаты которых известны на борту аппарата, обмен по гидроакустическому каналу связи между маяками и АНПА для формирования гидроакустических дальномерных данных, комплексирование бортовых и гидроакустических навигационных данных, применение средств двухсторонней гидроакустической связи между АНПА и ОС для информационного обмена. В соответствии с этим способом навигационно-информационной поддержки, для решения навигационной задачи определяют локальные координаты АНПА на его борту, счисленные по данным бортовых датчиков курса, скорости и глубины, затем корректируют накапливающиеся ошибки счисления по дальномерным гидроакустическим данным, принимаемым на борту аппарата. Ошибка счисления корректируется путем периодического определения положения объекта по измеряемым дальностям от комплекта маяков, предварительно установленным в районе работ. Причем координаты маяков могут быть известны перед началом работ на борту подводного аппарата или передаваться от маяков на АНПА по гидроакустической линии связи. Сами маяки могут быть как стационарными так и не стационарными. Нестационарные маяки обладают дополнительными средствами для определения своих текущих координат и информационного обмена с удаленным пунктом управления, например, имея средства спутниковой навигации и связи, с размещением элементов маяков на поверхности моря (Patent №5,579,285, Nov. 26, 1996. Method and device for the monitoring and remote control of unmanned mobile underwater vehicle; Yuya Nishida and … Development of an autonomous buoy system for AUV).
Работа систем возможна также при наличии только одного опорного маяка (A. Scherbatjuk. The AUV Positining using Ranges from one Transponder LBL - OCEANS 95, vol. 3, p. 1620-1623) с измерением дальности до маяка из ряда точек специальной траектории аппарата, которую он выполняет для решения навигационной задачи путем накопления траекторных дальномерных данных. Информационная поддержка обеспечивается средствами дополнительной системы связи.
Недостатками способа являются:
- ограниченный район работы АНПА из-за его привязки к зоне действия опорных маяков, дальность которых определяется выбранным частотным диапазоном гидроакустического канала связи;
- резкий рост габаритов гидроакустического оборудования, размещаемого на АНПА, для информационного обмена с маяками и судном, при увеличения дальности действия систем навигации (Larsen Mikael. Methods and Systems for Navigating under Water. / Patent WO 01/65274. 2001, March).
Известен способ навигационного обеспечения автономного подводного робота контролируемого с борта обеспечивающего судна. (Патент РФ №2344435, приоритет от 08.05.2007 г.), при котором на борту АНПА устанавливаются координаты стартовой точки, счисляется траектория движения по данным датчиков скорости курса и глубины, принимаются навигационные сигналы, излучаемые опорным гидроакустическим маяком, определяются собственные координаты относительно опорного гидроакустического маяка с известными координатами, получают оценку координат при комплексной обработке данных и передают ее по гидроакустическому каналу на борт сопровождающего судна, при котором опорный гидроакустический маяк связан кабельной линией с бортом ОС и выполнен в виде буксируемого устройства, координаты которого определяются средствами судовой навигации и передаются по гидроакустическому каналу на борт АНПА в составе навигационных сигналов излучаемых маяком. Гидроакустический маяк дополнен приемником навигационного сигнала. На борту АНПА размещен передатчик навигационного сигнала, который содержит координаты АНПА, а ОС движется, сопровождая движущийся АНПА.
Недостатком известного способа является необходимость привлечения обеспечивающего судна для поддержки миссии автономного АНПА.
Известен также способ навигации подводного робота (АНПА), совершающего протяженную миссию с контролем на борту обеспечивающего судна (Satoshi Tsukioka, Taro Aoki, Takashi Murashima. Experimental Results of an Autonomous Underwater Vehicle "Urashima" - Oceans-2003, p. 940-945), основанный на работе системы счисления на борту робота, использовании сети внешних опорных стационарных маяков, излучающих навигационные сигналы, наличии бортовой системы измерения дальности маяков, специальной системы гидроакустической связи между обеспечивающим судном и подводным роботом. В известном способе для коррекции системы счисления применяют только один стационарный опорный гидроакустический маяк с известными координатами, а для увеличения оперативности на борту робота дополнительно установлен пеленгатор углового положения опорного маяка. В системах навигации робота большой автономности и совершающего протяженную миссию (например, в режиме обследования подводного трубопровода или кабеля) вдоль трассы устанавливается сеть маяков. Каждый из этих маяков по очереди является опорным в своем районе трассы работ. Положение подводного робота определяется путем измерения дальности и углового положения маяка, координаты которого предварительно установлены на аппарате. Рассчитанные на борту аппарата комплексированные навигационные данные по гидроакустической системе связи передаются в пункт управления на борт обеспечивающего судна, позволяя контролировать ход работ в реальном времени.
Этот способ навигации АНПА по своему функциональному назначению, по своей технической сущности и достигаемому техническому результату наиболее близок к заявляемому техническому решению и принят за прототип.
Недостатками известного способа навигации в навигационных системах для АНПА с большой дальностью действия, являются:
- необходимость привлечения обеспечивающего судна,
- необходимость установки большого числа опорных маяков по трассе движения АНПА, что увеличивает время проведения работ и их стоимость,
- низкая пропускная способность гидроакустического канала информационного обмена,
- увеличение габаритов и энергопотребления гидроакустического навигационного оборудования АНПА из-за необходимости понижения диапазона рабочих частот для информационного обмена с опорными маяками с большой дальностью действия.
Задачей настоящего изобретения является обеспечение навигационно-информационной поддержки АНПА большой автономности, совершающего протяженный подводный переход, и уменьшение массогабаритных характеристик и энергопотребления навигационного гидроакустического оборудования, размещаемого на борту АНПА и предназначенного для решения задач навигации и информационного обмена с пунктом управления.
Задача решается тем, что в способе навигационно-информационной поддержки автономного необитаемого подводного аппарата большой автономности, совершающего протяженный подводный переход, при котором устанавливают координаты точки старта АНПА, расставляют по трассе движения сеть опорных маяков большой дальности действия с известными координатами, определяют текущее положение АНПА бортовой системой счисления, корректируют в соответствии с установленным периодом обсервации ошибки счисления на основании расчета координат АНПА по дальномерным данным от ближайшего опорного маяка с известными координатами, выполняют на АНПА прием команд телеуправления и передачу данных телеметрии с использованием опорного маяка, снабженного средствами гидроакустической связи с АНПА, а также средствами спутниковой навигации и связи с удаленным пунктом управления, дополнительно оснащают опорные маяки высокочастотным (ВЧ) малой дальности действия и низкочастотным (НЧ) большой дальности действия гидроакустическими приемо-передающими средствами информационного обмена с АНПА. АНПА также оснащают ВЧ гидроакустическими средствами приема-передачи и НЧ гидроакустическими средствами приема для информационного обмена с опорным маяком, кроме того, АНПА оснащают программными средствами для его бортовой системы управления, реализующими выход АНПА к опорному маяку на основании приема и обработки данных, принятых от опорного маяка в низкочастотном диапазоне. После чего размещают опорные маяки по трассе следования в точках предполагаемых обсерваций, а период обсерваций устанавливается временем, в течение которого формируемая ошибка счисления координат будет сравнима с дальностью действия низкочастотного канала связи. Затем выполняют коррекцию счисленных координат путем их сравнения с расчетными координатами по дальномерным данным опорного маяка с известными координатами на основании приема и обработки данных, принятых от опорного маяка в высокочастотном диапазоне. Выполняют прием команд управления на борту АНПА путем приема и обработки данных, переданных от опорного маяка в высокочастотном диапазоне, и выполняют передачу данных телеметрии с борта АНПА путем приема и обработки данных, принятых опорным маяком в высокочастотном диапазоне.
Кроме того, значения рабочих частот гидроакустических средств информационного обмена в НЧ диапазоне выбирают из условия достижения требуемой дальности действия этих средств, которая должна быть как минимум вдвое большей максимальной ошибки счисления координат по данным бортовой навигационной системы АНПА за период обсервации, а значения рабочих частот гидроакустических средств информационного обмена в ВЧ диапазоне выбирают из условия обеспечения пропускной способности канала для передачи задаваемого объема телеметрических данных.
Сопоставительный анализ заявляемого технического решения и прототипа показывает, что первое в отличие от прототипа имеет следующие существенные признаки:
- оснащают опорные маяки высокочастотным (ВЧ) малой дальности действия и низкочастотным (НЧ) большой дальности действия гидроакустическими приемо-передающими средствами информационного обмена с АНПА;
- оснащают АНПА ВЧ гидроакустическими средствами приема-передачи и НЧ гидроакустическими средствами приема для информационного обмена с опорным маяком, кроме того, АНПА оснащают программными средствами для его бортовой системы управления, реализующими выход АНПА к опорному маяку на основании приема и обработки данных, принятых от опорного маяка в низкочастотном диапазоне;
- размещают опорные маяки по трассе следования в точках предполагаемых обсерваций, а период обсерваций устанавливается временем, в течение которого формируемая ошибка счисления координат будет сравнима с дальностью действия низкочастотного канала связи;
- выполняют коррекцию счисленных координат путем их сравнения с расчетными координатами по дальномерным данным ближайшего опорного маяка с известными координатами на основании приема и обработки данных, принятых от опорного маяка в высокочастотном диапазоне;
- выполняют прием команд управления на борту АНПА путем приема и обработки данных, переданных от опорного маяка в высокочастотном диапазоне;
- выполняют передачу данных телеметрии с борта АНПА путем приема и обработки данных, принятых опорным маяком в высокочастотном диапазоне.
В заявленном способе навигационно-информационной поддержки АНПА большой автономности, совершающего протяженный подводный переход с использованием его бортовой навигационной системы и гидроакустических средств навигации и связи, а также внешних опорных маяков, и обеспечивающий определение координат и контроль положения движущегося АНПА, а также передачу на него команд управления и прием от него данных телеметрии на удаленный ПУ, имеются следующие преимущества:
- АНПА выполняет автономную миссию без сопровождающего судна,
- работу АНПА поддерживает редкая сеть опорных маяков с большой дальностью действия по трассе движения АНПА,
- габариты и энергопотребление гидроакустического навигационного оборудования АНПА минимальны за счет отсутствия на его борту аппаратуры передачи НЧ диапазона гидроакустической связи. Так например, оптимальная частота НЧ системы связи с дальностью 80 км составляет около 1 кГц (В.И. Бородин, Г.Е. Смирнов. Н.А. Толстякова. Г.В. Яковлев. Гидроакустические навигационные средства. - Ленинград. Судостроение, 1983. с. 33). На такой частоте диаметр эффективно работающих ненаправленных передающих антенн составит десятки сантиметров при массе до сотен кг и энергопотреблении единицы кВт. Размещение оборудования с такими массогабаритными и энергетическими характеристиками на АНПА ведет к уменьшению его автономности и является неприемлемым. На основании этого, на борту АНПА размещают только малогабаритную и мало потребляющую электроэнергию (единицы Вт) приемную аппаратуру этой системы связи.
Навигация и информационный обмен между удаленным пунктом управления и АНПА осуществляется путем применения редкой сети установленных по трассе движения радиогидроакустических опорных маяков (ОМ) большой дальности действия, снабженных средствами спутниковой навигации и связи, каждый из которых обеспечивает информационный обмен с АНПА по гидроакустическому каналу связи, для чего содержит габаритную приемо-передающую аппаратуру низкочастотного (НЧ) канала гидроакустической связи с большой дальностью действия и малогабаритную приемо-передающую аппаратуру высокочастотного (ВЧ) канала гидроакустической связи с малой дальностью. При этом на АНПА, наряду с бортовой системой счисления, размещают малогабаритную приемо-передающую аппаратуру ВЧ канала гидроакустической связи с опорным маяком, а также малогабаритную приемную аппаратуру НЧ канала гидроакустической связи с опорным маяком. Формирование редкой сети опорных маяков, выставляемых по трассе движения АНПА, достигается за счет их размещения в точках предполагаемых обсерваций, а период обсерваций устанавливается временем, в течение которого формируемая ошибка счисления координат АНПА не превысит дальности действия НЧ канала гидроакустической связи.
Технический результат - обеспечение навигационно-информационной поддержки АНПА большой автономности, совершающего протяженный подводный переход, и уменьшение массогабаритных характеристик и энергопотребления навигационного гидроакустического оборудования, размещаемого на борту АНПА, достигается за счет применения редкой сети опорных маяков с большой дальностью действия и отсутствия на борту АНПА габаритной и энергопотребляющей аппаратуры передачи НЧ канала гидроакустической связи.
Совокупность существенных признаков заявленного изобретения имеет причинно-следственную связь с достигаемым техническим результатом. На основании изложенного можно заключить, что заявленное техническое решение является новым и обладает изобретательским уровнем, т.к. явным образом не следует из уровня техники и пригодно для промышленного применения.
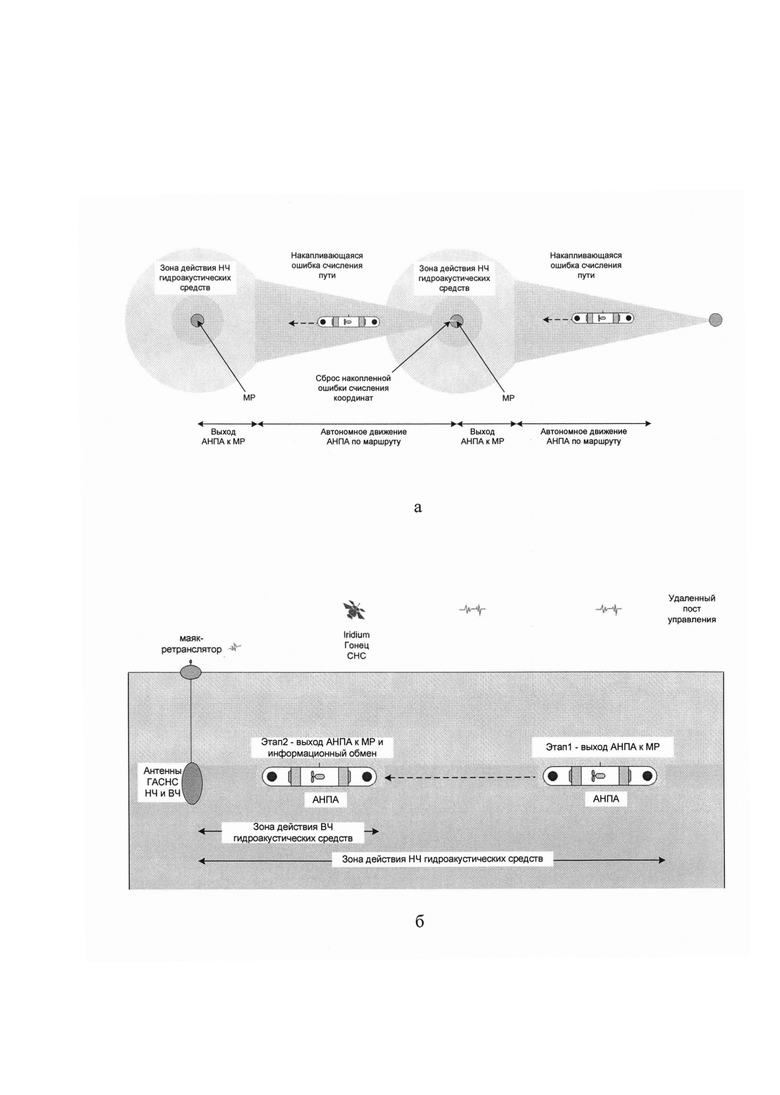
Сущность изобретения поясняется чертежом, где изображена структурная схема реализации предложенного способа навигационно-информационной поддержки с распределением оборудования на борту подводного аппарата и опорного маяка, где а - схема траектории движения подводного аппарата по протяженному маршруту, б - схема движения подводного аппарата в зоне действия НЧ канала гидроакустической связи и переход в зону действия ВЧ канала гидроакустической связи.
Способ реализуется следующим образом.
АНПА дополнительно оснащают ВЧ гидроакустическими средствами приема-передачи и НЧ гидроакустическими средствами приема для информационного обмена с опорным маяком. Кроме того, АНПА оснащают программными средствами для его бортовой системы управления, реализующими выход АНПА к опорному маяку на основании приема и обработки данных, принятых от опорного маяка в низкочастотном диапазоне. Устанавливают координаты точки старта АНПА и аппарат начинает совершать многосуточный автономный (например, подо льдом) переход. По трассе движения АНПА размещают ряд опорных маяков навигационно-информационной поддержки. Опорные маяки оснащены высокочастотным (ВЧ) малой дальности действия и низкочастотным (НЧ) большой дальности действия гидроакустическими приемо-передающими средствами информационного обмена с АНПА, а также (при возможности) средствами спутниковой навигации и связи. При скорости движения например 5 м/с, АНПА за сутки пройдет более 400 км, при этом накопленная ошибка системы счисления за счет технических характеристик измерителя абсолютной скорости и курса составляет 0.5% от пройденного пути или более 20 км. В этом случае опорный маяк должен быть размещен по трассе движения на дистанции 400 км от точки старта, а дальность действия его НЧ низкоскоростной системы связи должна быть вдвое больше ошибки счисления, т.е. около 40 км. При выходе АНПА в зону работы передатчика НЧ гидроакустической связи опорного маяка на АНПА принимается навигационный сигнал и обеспечивается измерение текущей дальности до опорного маяка. Далее бортовой системой управления АНПА выполняется операция «Выход на маяк» по дальномерным данным от него (например, A.M. Павин Автоматическое приведение автономного подводного робота к гидроакустическому маяку - / Подводные исследования и робототехника, 2008, №1(5), с. 32-38). При достижении дистанции десятки метров между АНПА и маяком, дальнейшая операция точного выхода на маяк выполняется по дальномерным данным ВЧ канала связи, например с рабочей частотой 100 кГц и скоростью, например, 32 кбит/с. При попадании АНПА в окрестность нескольких метров от опорного маяка производится:
- сброс накопленной ошибки счисления координат и формирование координат стартовой точки для перехода к опорному маяку в следующей точке обсервации,
- коррекция счисленных координат путем их сравнения с расчетными координатами по дальномерным данным опорного маяка с известными координатами на основании приема и обработки данных, принятых от маяка в высокочастотном диапазоне,
- прием команд управления на борту АНПА от маяка путем приема и обработки данных, переданных от маяка в высокочастотном диапазоне,
- передача данных телеметрии с борта АНПА на маяк путем приема и обработки данных, принятых маяком в высокочастотном диапазоне.
При этом команды управления и данные телеметрии от удаленного пункта управления передаются (принимаются) маяком по каналу спутниковой связи (по возможности) или сохраняются (считываются) во внутренней памяти маяка.
Еще больший эффект может быть получен при применении маяков с существенно меньшей рабочей частотой НЧ диапазона. Например, при частоте 1 кГц дальность действия может составить до 100 км, а период расстановки маяков при упомянутой ошибке счисления и скорости АНПА будет уже более 1000 км.
Значения рабочих частот гидроакустических средств информационного обмена в низкочастотном диапазоне выбирают из условия достижения требуемой дальности действия этих средств, которая должна быть как минимум вдвое большей максимальной ошибки счисления координат по данным бортовой навигационной системы АНПА за период обсервации, а значения рабочих частот гидроакустических средств информационного обмена в высокочастотном диапазоне выбирают из условия объема и скорости передачи телеметрических данных.
Способ разработан в Институте проблем морских технологий ДВО РАН и используется для навигации автономных необитаемых подводных аппаратов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ навигационно-информационной поддержки автономного необитаемого подводного аппарата, выполняющего мониторинг подводного добычного комплекса | 2021 |
|
RU2756668C1 |
| Способ навигационно-информационной поддержки глубоководного автономного необитаемого подводного аппарата | 2018 |
|
RU2689281C1 |
| Способ навигационной поддержки глубоководного автономного необитаемого подводного аппарата | 2023 |
|
RU2815198C1 |
| Способ навигационной поддержки группы специализированных подводных аппаратов, выполняющих общую миссию в мелководной акватории | 2023 |
|
RU2819199C1 |
| Система мониторинга технического состояния подводного добычного комплекса | 2021 |
|
RU2774662C1 |
| Способ позиционирования автономного подводного аппарата в глубоком море | 2022 |
|
RU2792922C1 |
| СПОСОБ ПРОВЕРКИ ТОЧНОСТИ НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2022 |
|
RU2789714C1 |
| СПОСОБ НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ АВТОНОМНОГО ПОДВОДНОГО РОБОТА, КОНТРОЛИРУЕМОГО С БОРТА ОБЕСПЕЧИВАЮЩЕГО СУДНА | 2007 |
|
RU2344435C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| Способ позиционирования самоходного необитаемого подводного аппарата, выполняющего мониторинг подводной акватории | 2022 |
|
RU2794555C1 |
Изобретение относится к подводной технике и, в частности, к технологиям создания средств навигации и информационного обмена для автономного необитаемого подводного аппарата (АНПА) с большой автономностью и дальностью действия, например, при выполнении миссий подо льдом, в условиях отсутствия сопровождающего судна-носителя (ОС) и необходимости минимизации дополнительного внешнего навигационного оборудования. Технический результат: обеспечение навигационно-информационной поддержки АНПА большой автономности, совершающего протяженный подводный переход, и уменьшение массогабаритных характеристик и энергопотребления навигационного гидроакустического оборудования, размещаемого на борту АНПА, достигается за счет применения редкой сети опорных маяков с большой дальностью действия и отсутствия на борту АНПА габаритной и энергопотребляющей аппаратуры передачи НЧ канала гидроакустической связи. Способ навигационно-информационной поддержки автономного необитаемого подводного аппарата большой автономности, совершающего протяженный подводный переход, при котором устанавливают координаты точки старта АНПА. Опорные маяки оснащают высокочастотным (ВЧ) малой дальности действия и низкочастотным (НЧ) большой дальности действия гидроакустическими приемо-передающими средствами информационного обмена с АНПА. Также оснащают АНПА ВЧ гидроакустическими средствами приема-передачи и НЧ гидроакустическими средствами приема для информационного обмена с опорным маяком. Кроме того, АНПА оснащают программными средствами для его бортовой системы управления, реализующими выход АНПА к опорному маяку на основании приема и обработки данных, принятых от опорного маяка в низкочастотном диапазоне. После чего размещают опорные маяки большой дальности действия по трассе следования в точках предполагаемых обсерваций, а период обсерваций устанавливается временем, в течение которого формируемая ошибка счисления координат будет сравнима с дальностью действия низкочастотного канала связи. Выполняют коррекцию счисленных координат путем их сравнения с расчетными координатами по дальномерным данным ближайшего опорного маяка с известными координатами на основании приема и обработки данных, принятых от опорного маяка в высокочастотном диапазоне. Выполняют прием команд управления от удаленного ПУ на борту АНПА путем приема и обработки данных, переданных от опорного маяка в высокочастотном диапазоне. Выполняют передачу данных телеметрии на удаленный ПУ с борта АНПА путем приема и обработки данных, принятых опорным маяком в высокочастотном диапазоне, а также средствами спутниковой навигации и связи с удаленным пунктом управления. 1 з.п. ф-лы, 2 ил. 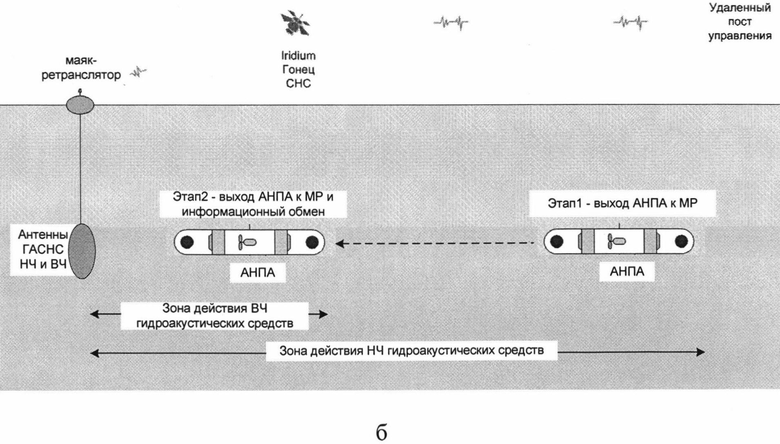
1. Способ навигационно-информационной поддержки автономного необитаемого подводного аппарата большой автономности, совершающего протяженный подводный переход, при котором устанавливают координаты точки старта АНПА, расставляют по трассе движения сеть опорных маяков большой дальности действия с известными координатами, определяют текущее положение АНПА бортовой системой счисления, корректируют в соответствии с установленным периодом обсервации ошибки счисления на основании расчета координат АНПА по дальномерным данным от ближайшего опорного маяка с известными координатами, выполняют на АНПА прием команд телеуправления и передачу данных телеметрии с использованием опорного маяка, снабженного средствами гидроакустической связи с АНПА, а также средствами спутниковой навигации и связи с удаленным пунктом управления (ПУ), отличающийся тем, что опорные маяки оснащают высокочастотным (ВЧ) малой дальности действия и низкочастотным (НЧ) большой дальности действия гидроакустическими приемо-передающими средствами информационного обмена с АНПА, а АНПА также оснащают ВЧ гидроакустическими средствами приема-передачи и НЧ гидроакустическими средствами приема для информационного обмена с опорным маяком, кроме того, АНПА оснащают программными средствами для его бортовой системы управления, реализующими выход АНПА к опорному маяку на основании приема и обработки данных, принятых от опорного маяка в низкочастотном диапазоне, после чего размещают опорные маяки по трассе следования в точках предполагаемых обсерваций, а период обсерваций устанавливается временем, в течение которого формируемая ошибка счисления координат будет сравнима с дальностью действия низкочастотного канала связи, затем выполняют коррекцию счисленных координат путем их сравнения с расчетными координатами по дальномерным данным опорного маяка с известными координатами на основании приема и обработки данных, принятых от опорного маяка в высокочастотном диапазоне, выполняют прием команд управления от удаленного ПУ на борту АНПА путем приема и обработки данных, переданных от опорного маяка в высокочастотном диапазоне, выполняют передачу данных телеметрии на удаленный ПУ с борта АНПА путем приема и обработки данных, принятых опорным маяком в высокочастотном диапазоне.
2. Способ по п. 1, отличающийся тем, что значения рабочих частот гидроакустических средств информационного обмена в низкочастотном диапазоне выбирают из условия достижения требуемой дальности действия этих средств, которая должна быть как минимум вдвое большей максимальной ошибки счисления координат по данным бортовой навигационной системы АНПА за период обсервации, а значения рабочих частот гидроакустических средств информационного обмена в высокочастотном диапазоне выбирают из условия объема и скорости передачи телеметрических данных.
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАЧАЛЬНЫХ КООРДИНАТ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2016 |
|
RU2629916C1 |
| АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ ДЛЯ ИЗМЕРЕНИЯ ДИФФЕРЕНЦИАЛЬНЫХ ХАРАКТЕРИСТИК ВЕКТОРНОГО ЗВУКОВОГО ПОЛЯ | 2017 |
|
RU2664971C1 |
| СПОСОБ НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ АВТОНОМНОГО ПОДВОДНОГО РОБОТА, КОНТРОЛИРУЕМОГО С БОРТА ОБЕСПЕЧИВАЮЩЕГО СУДНА | 2007 |
|
RU2344435C1 |
| US 9067648 B2, 30.06.2015 | |||
| ВИГОВСКИЙ К.В | |||
| ОБОСНОВАНИЕ СОСТАВА И ХАРАКТЕРИСТИК ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА | |||
| Диссертация, Санкт-Петербург, 2018, стр | |||
| Способ очистки нефти и нефтяных продуктов и уничтожения их флюоресценции | 1921 |
|
SU31A1 |
| Ю.В | |||
| Ваулин и др | |||
| Навигационный комплекс автономного подводного робота и особенности его применения в условиях Арктики | |||
| Подводные исследования и робототехника, 2008, номер 1(5), стр | |||
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |

