Геостационарная орбита (ГСО) имеет особенное значение для размещения космических аппаратов различного назначения. Космические аппараты (КА) на этой орбите постоянно находятся над заданными районами на земной поверхности. Эта особенность ГСО чрезвычайно важна для систем связи, наблюдения и управления. Однако на ГСО невозможно разместить такое количество космических аппаратов, которое удовлетворяет международные потребности, поэтому стали широко использоваться геосинхронные орбиты, имеющие тот же период обращения, но отличающиеся от ГСО эксцентриситетом и наклонением. Космическое пространство вблизи ГСО, в котором расположены эти орбиты, образует рассматриваемую далее геостационарную область (ГО).
Перегруженность ГСО космическими аппаратами и отработавшими ступенями их вывода, превратившимися в космический мусор, поставила задачу оценки их рабочего состояния для возможной организации удаления с ГСО неисправных и отработавших свое назначение изделий.
Поскольку с поверхности Земли в большинстве случаев такую оценку сделать невозможно, возникает необходимость создать специализированный КА для обзора геостационарной области, окружающей ГСО. Для организации работы такого КА необходимо определить размеры и конфигурацию осматриваемой области, выбрать параметры орбиты КА и установить задачи его наблюдений.
Целью настоящего изобретения является определение области космического пространства, подлежащей наблюдению, и разработка способа обнаружения и наблюдения с космического аппарата объектов космического мусора (КМ), находящихся в выделенном районе геостационарной области, определения их координат и параметров движения, а также получения их детальных изображений.
Известны космические системы, реализующие способы обзора геостационарной области для обнаружения и наблюдения находящихся в этой области объектов.
Космический аппарат системы SBSS (Space-Based Space Surveillance Satellite) [1] был запущен 26.09.2010 на низкую круговую солнечно-синхронную орбиту с наклонением 97,97°, высотой перигея 625,0 км, высотой апогея 640,0 км и периодом обращения 97,42 мин. Основной полезной нагрузкой является датчик видимого диапазона с телескопом диаметром 30 см. Телескоп установлен на двухосном карданном подвесе с приводом повышенного быстродействия, что дает ему широкое поле обзора - три четверти всего неба. Космический аппарат системы SBSS функционирует 24 часа в сутки и может отслеживать каждый объект в области геосинхронных орбит, по крайней мере, один раз в сутки.
Недостатком способа обзора КА системы SBSS является невозможность получения детальных изображений наблюдаемых объектов в геостационарной области из-за больших расстояний до этих объектов.
АО «НПО имени Лавочкина» предложен способ обзора геостационарной орбиты [2], реализуемый космическими аппаратами, которые размещают на полусуточных высокоэллиптических орбитах (ВЭО) с наклонением около 63,4° и аргументом широты в районе 0° или 180°. Обзорное наблюдение и измерение координат наблюдаемых объектов производят с двух КА со специализированной оптической аппаратурой на шестичасовом рабочем участке орбиты, который каждый КА проходит со сдвигом в 6 часов. За два витка, то есть в течение суток, может быть обеспечен полный обзор ГСО при дальности наблюдения в пределах от 17000 до 18000 км.
Получение детальных изображений наблюдаемых объектов предложено производить с двух других КА с другой оптической аппаратурой при наблюдении объектов на дальности от 100 км до 400 км с ВЭО, имеющей апогей в близкой окрестности ГСО.
Недостатком этого способа обзора ГСО является необходимость применения двух пар КА разных типов с разной оптической аппаратурой наблюдения, размещаемых на ВЭО с разными параметрами.
В патенте РФ №2659379 [3] приведено описание способа обзора геостационарной области с космического аппарата, движущегося по ВЭО с апогеем в интервале высот от 200 км выше до 500 км ниже ГСО и высотой перигея до 5000 км, с наклонением от 0° до 5°. Дальность наблюдения определяется характеристиками бортовой аппаратуры наблюдения. Предложен метод рационального выбора параметров ВЭО, обеспечивающий получение детальных изображений объектов на ГСО за минимальное количество суток. Получение детальных изображений производится на контролируемых участках ГСО с рабочего участка ВЭО, симметричного относительно ее апогея.
К недостатку этого способа следует отнести невозможность заранее с КА обнаружить объект и получить его детальные изображения.
В качестве прототипа принят способ обнаружения и контроля космического мусора вблизи геостационарной орбиты, изложенный в патенте РФ №2684253 [4]. Космический аппарат описанной системы размещают ниже ГСО на расстояния от 5280 км до 21894 км. Он обеспечивает обзор всей ГСО за время от 4,5 до 0,5 суток соответственно. Оптическую систему КА размещают на поворотной платформе и направляют вверх в сторону ГСО. Полосу обзора ГСО формируют разворотом поля зрения оптической системы вокруг вектора орбитальной скорости КА в несколько дискретных положений.
К недостатку прототипа следует отнести невозможность предварительно на дальних расстояниях выделить нужный объект, определить его координаты и параметры движения, приблизиться к нему и получить его детальные изображения.
Технический результат предлагаемого изобретения заключается в определении конфигурации и размеров области космического пространства, подлежащей наблюдению для обнаружения объектов. Эта область расположена вокруг геостационарной орбиты. Она ограничена как по высоте, расстояниями выше и ниже ГСО, так и расстояниями к северу и югу в перпендикулярном к плоскости экватора направлении. Размеры этой геостационарной области определяются исходя из анализа орбит большинства используемых геостационарных и геосинхронных КА.
Технический результат предлагаемого изобретения заключается в выборе орбиты КА, параметры которой назначают в зависимости от характеристик оптико-электронной аппаратуры получения детальных изображений объектов, размещенной на КА. Эти характеристики определяют максимальную дальность, допустимую для получения изображений наблюдаемого объекта с заданным разрешением при движении КА по выбранной орбите выше или ниже ГСО, или по орбите, задаваемой командами с наземного пункта управления.
Технический результат заключается также в способе обнаружения объектов в геостационарной области, определении координат и параметров движения обнаруженных объектов и получении детальных изображений наблюдаемого объекта.
Указанные технические результаты достигаются тем, что космический аппарат размещают около геостационарной орбиты, снабжают системой угловой стабилизации и ориентации, системой электропитания, системой терморегулирования, аппаратурой передачи и приема данных, выполненной с возможностью осуществления связи с наземным пунктом управления полетом космического аппарата. При этом размеры области наблюдения геостационарной области выбирают по результатам анализа каталогизированных техногенных космических объектов (ТКО), находящихся в ГО. Кроме того, форму области наблюдения ГО задают в виде кольца прямоугольного поперечного сечения геостационарной области (ПСГО), располагаемого вдоль геостационарной орбиты (ГСО), в котором находятся полностью от апогея до перигея большинство орбит каталогизированных ТКО. Вместе с тем, устанавливают границу ПСГО выше ГСО не более 200 км, определяемую высотой орбит захоронения отработавших свой жизненный цикл космических аппаратов, границу ниже ГСО высотой перигеев большинства каталогизированных ТКО, а к югу и к северу от ГСО углом наклонения i большинства каталогизированных ТКО, находящихся на геосинхронных орбитах. Причем КА снабжают аппаратурой обнаружения объектов ТКО, определения их угловых координат и параметров движения, аппаратурой получения детальных изображений объектов ТКО, вычислительным комплексом с блоком памяти. При этом КА размещают на круговой орбите в плоскости экватора или выше ГСО для движения на запад, или ниже ГСО для движения на восток. Сверх того, используют последовательно аппаратуру обнаружения объектов ТКО, определения их угловых координат и параметров движения, а также аппаратуру получения детальных изображений объектов ТКО для сбора информации об объектах космического мусора и других объектах. Кроме того, высоту орбиты КА устанавливают от ГСО на расстоянии h км, определяемом из условий возможности получения аппаратурой детальных изображений наибольшего по имеющимся каталогизированным данным количества ТКО, находящихся в сфере пространства вокруг КА, радиусом предельной дальности Rпд получения детальных изображений и обеспечения при этом максимально возможной скорости дрейфа КА (ωдр) относительно ГСО. Устанавливают поле зрения аппаратуры обнаружения объектов ТКО, определения их координат и параметров движения по направлению движения КА, дрейфующего вдоль геостационарной орбиты на район, в котором располагается движущееся параллельно с КА ПСГО. Причем расстояние (D) от КА до ПСГО, при которой поле зрения аппаратуры обнаружения, определения координат и параметров движения объектов ТКО полностью накрывает ПГСО, определяют как величину, рассчитываемую по формуле D=d/tg (ωпз 12), где d - половина диагонали прямоугольного ПСГО, ωпз - поле зрения аппаратуры обнаружения КА. Далее вычисляют угол наклона θ поля зрения аппаратуры обнаружения КА вниз от вектора скорости КА по формуле θ=arc sin D / 2Rгсо, где радиус ГСО Rгсо равен 42164 км, и наводят аппаратуру обнаружения на выбранное ПСГО.
Производят обзор ПСГО, обнаруживают, селектируют от звезд искомые объекты ТКО. Определяют параметры их движения, сравнивают с имеющимися данными в блоке памяти вычислительного комплекса КА, выбирают из обнаруженных объекты ТКО для получения их детальных изображений. Рассчитывают время сближения с ними, в расчетное время наводят аппаратуру получения детальных изображений объектов на выбранный объект ТКО. Получают его детальные изображения, полученные данные заносят в блок памяти вычислительного комплекса КА. Затем возобновляют обзор поперечного сечения геостационарной области, а при сеансах связи по радиолинии передают полученную информацию на пункт управления полетом КА.
Существует вариант, в котором район наблюдения ГО задают в виде части кольца ГО.
Существует вариант, в котором по завершении наблюдения части кольца ПСГО при расположении КА на орбите выше или ниже ГСО осуществляют перевод КА на орбиту ниже или выше ГСО соответственно, наводят аппаратуру обнаружения на выбранное ПСГО, производят обзор ПСГО, обнаруживают, селектируют от звезд искомые объекты ТКО, определяют параметры их движения, сравнивают с имеющимися данными в блоке памяти вычислительного комплекса КА, выбирают из обнаруженных объекты ТКО для получения их детальных изображений, рассчитывают время сближения с ними, в расчетное время наводят аппаратуру получения детальных изображений объектов на выбранный объект ТКО, получают его детальные изображения, полученные данные заносят в блок памяти вычислительного комплекса КА, затем возобновляют обзор поперечного сечения геостационарной области, а при сеансах связи по радиолинии передают полученную информацию на пункт управления полетом КА, причем маневр КА вверх вниз повторяют до поступления новой команды с пункта управления полетом КА.
Существует вариант, в котором в режиме управления с КА с пункта управления полетом КА аппаратуру обнаружения наводят по небесным координатам, передаваемым на КА с пункта управления полетом КА, производят обзор в заданных координатах, обнаруживают объект ТКО, определяют его координаты и параметры движения и полученные данные по радиолинии передают на пункт управления полетом КА.
Существует вариант, в котором по командам, передаваемым с пункта управления полетом КА, меняют орбиту полета КА, переходят на режим сближения с заданным объектом, по достижению необходимого расстояния наводят аппаратуру получения детальных изображений на заданный объект и полученные изображения по радиолинии передают на пункт управления полетом КА.
В большинстве своем объекты космического мусора, к которым относятся вышедшие из строя космические аппараты, не переведенные еще на орбиты захоронения, части ракет и др., распределяются по высотам таким же образом, как и указанные выше КА, и будут также наблюдаться в определенной выше геостационарной области. Поэтому в дальнейшем наблюдаемая совокупность действующих КА и указанных крупных элементов космического мусора будет обозначаться термином «техногенные космические объекты» (ТКО).
Предлагаемый способ обзора геостационарной области поясняется чертежами на фиг. 1 - фиг. 12.
Фиг. 1 - показан процент количества космических аппаратов в зависимости от расстояния ±h [км] от ГСО.
Фиг. 2 - представлена часть геостационарной области, в которой находится полностью орбиты 79% КА и остальных крупных объектов, апогеи и перигеи которых располагаются в диапазоне высот 200 км выше ГСО и 200 км ниже ГСО и ±200 км к северу и югу от плоскости экватора на высоте ГСО, а их наклонения не превышает 0,27°.
Фиг. 3 - представлена часть геостационарной области, в которой находится полностью орбиты 80% КА и остальных крупных объектов, апогеи и перигеи которых располагаются в диапазоне высот 200 км выше ГСО и 300 км ниже ГСО и ±300 км к северу и югу от плоскости экватора на высоте ГСО, а их наклонения не превышает 0,4°.
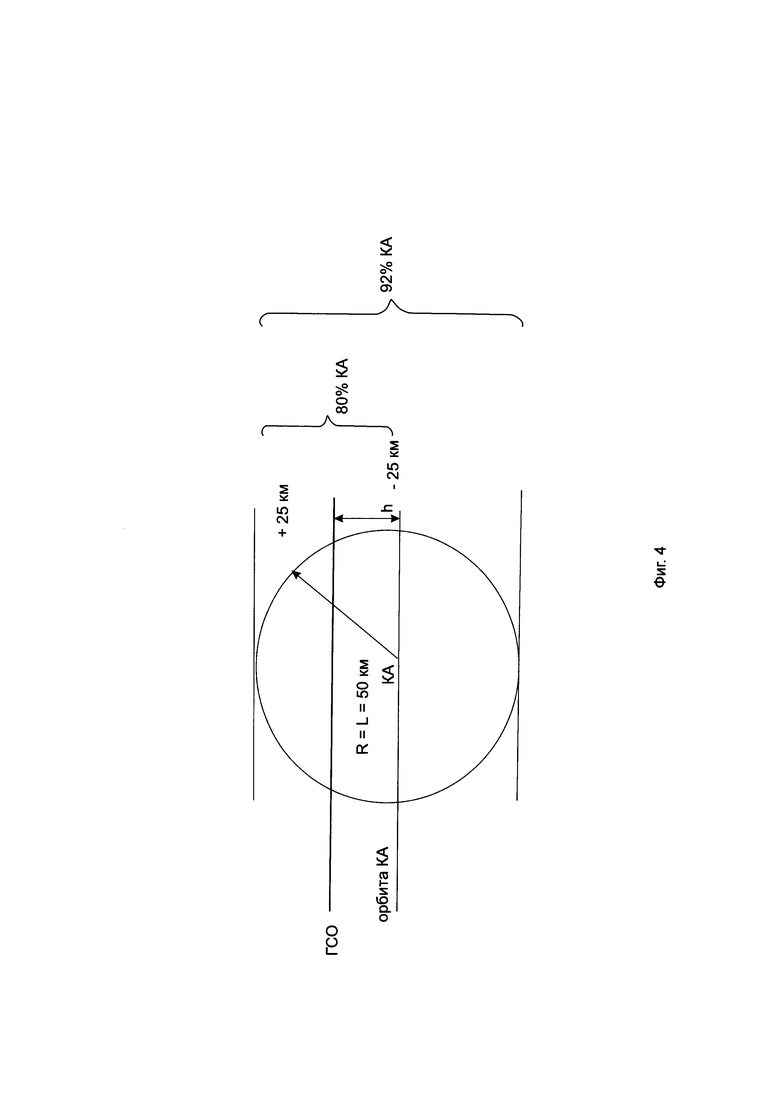
Фиг. 4, фиг. 5 - показаны схемы наблюдения для получения детальных изображений КО с космического аппарата, движущегося по орбите, лежащей в плоскости экватора ниже ГСО.
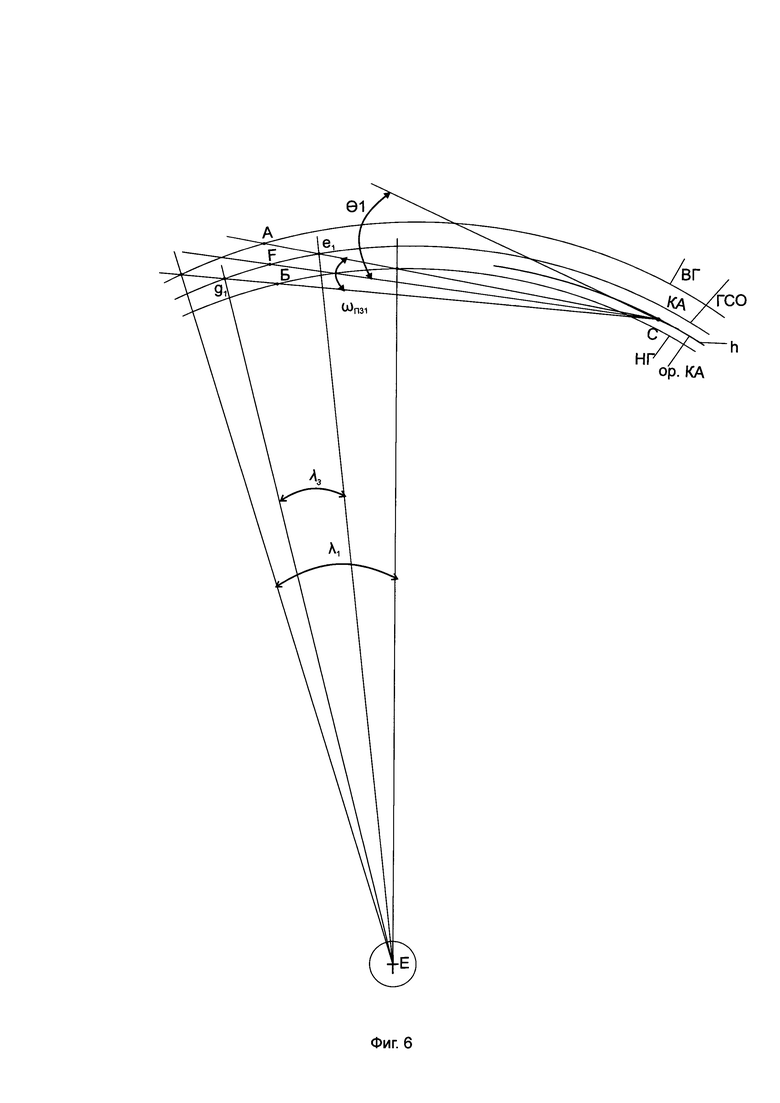
Фиг. 6 - приведена схема наблюдения ГО, когда КА движется ниже ГСО на восток.
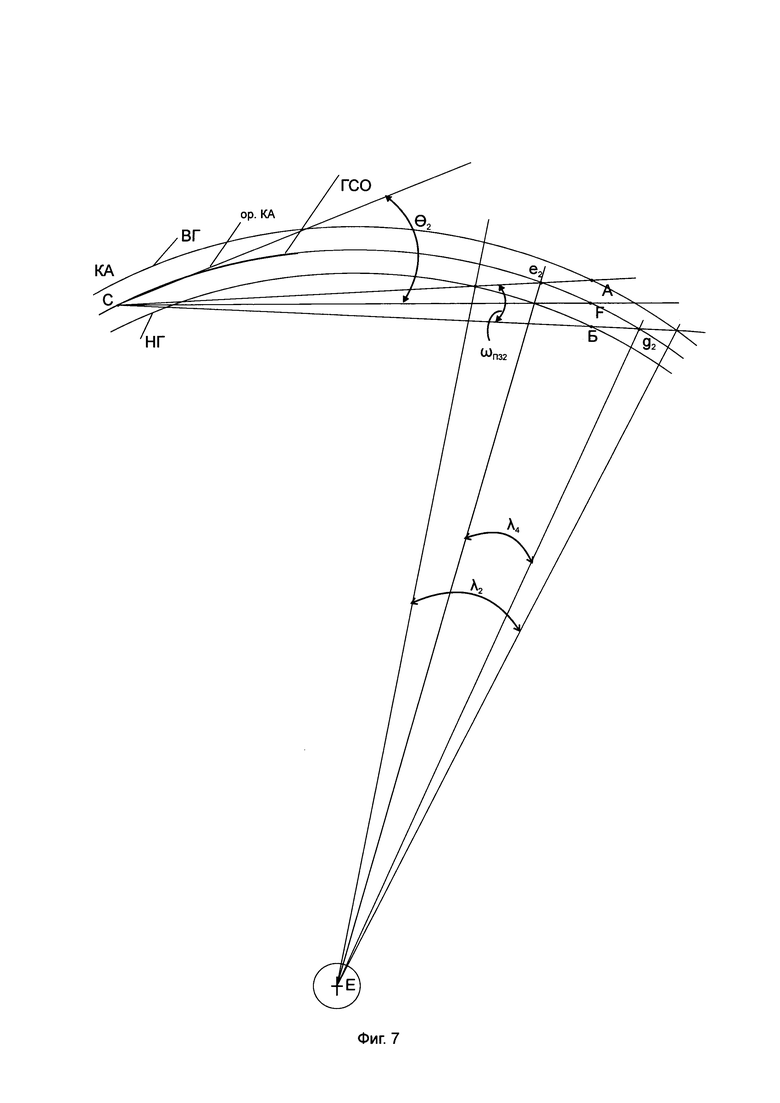
Фиг. 7 - приведена схема наблюдения ГО, когда КА выше ГСО движется на запад.
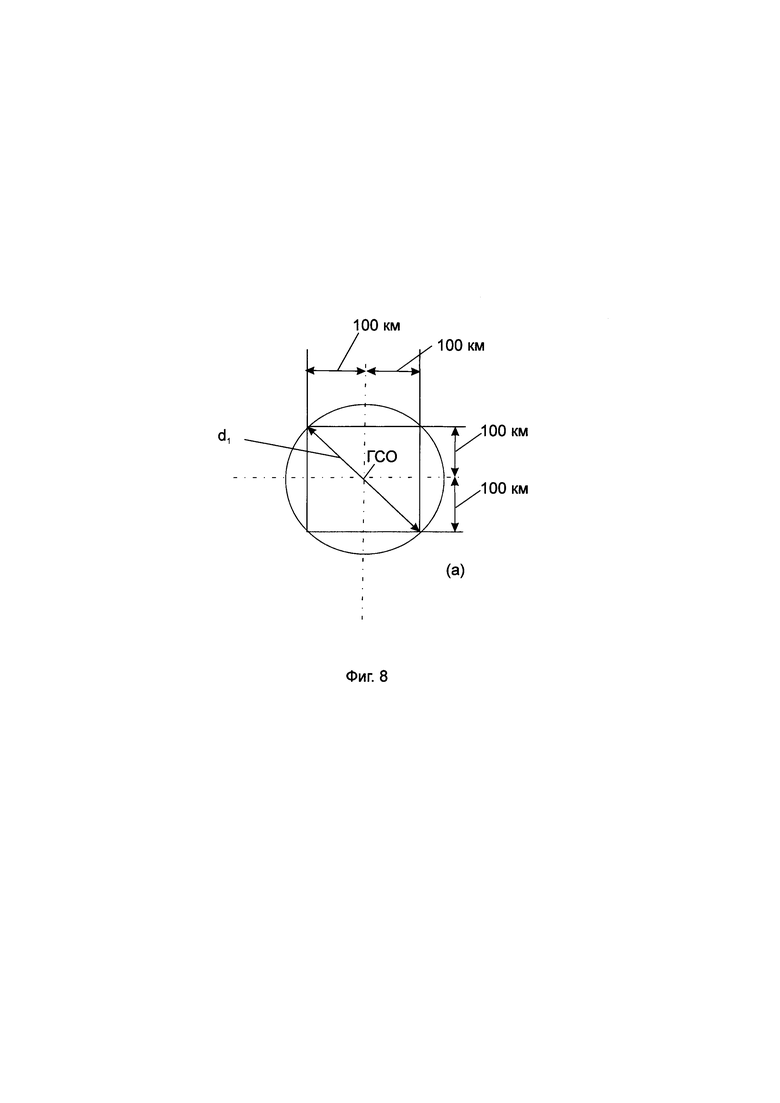
Фиг. 8, 9, 10 - в качестве примеров показаны три варианта размеров поперечного сечения ГО.
Фиг. 11 - показан диаметр круга d, в который полностью входит ПСГО,
где ωпз - угол поля зрения бортовой аппаратуры обнаружения;
D - расстояние от КА до наблюдаемого ПС ГО.
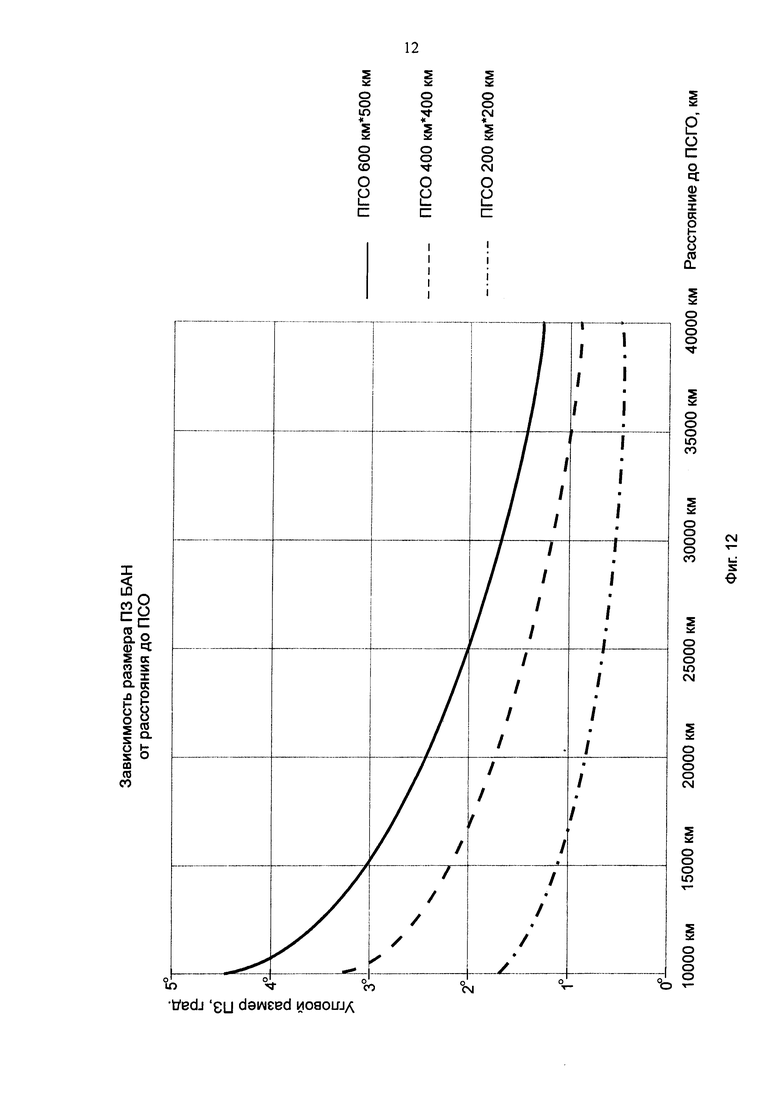
Фиг. 12 - представлена зависимость размера углов поля зрения аппаратуры обнаружения от расстояний от КА до наблюдаемых поперечных сечений.
Предложенный способ реализуется следующим образом. Космический аппарат размещают около геостационарной орбиты, снабжают системой угловой стабилизации и ориентации, системой электропитания, системой терморегулирования, аппаратурой передачи и приема данных, выполненной с возможностью осуществления связи с наземным пунктом управления полетом КА. Космический аппарат, задачей которого является обзор геостационарной области, снабженный аппаратурой обнаружения космических объектов, аппаратурой получения их детальных изображений, вычислительным комплексом с блоком памяти и приемо-передающей аппаратурой линии связи с командным пунктом управления полетом, должен работать в двух режимах:
- автономный режим, при котором КА работает по программам, заложенным в его бортовой вычислительный комплекс;
- режим наблюдения космического пространства и космических объектов по командам, передаваемым с командного пункта.
При этом размеры области наблюдения геостационарной области выбирают по результатам анализа каталогизированных техногенных космических объектов находящихся в ГО. Кроме того, форму области наблюдения ГО задают в виде кольца прямоугольного поперечного сечения геостационарной области, располагаемого вдоль геостационарной орбиты, в котором находятся полностью от апогея до перигея большинство орбит каталогизированных ТКО. Вместе с тем, устанавливают границу ПСГО выше ГСО не более 200 км, определяемую высотой орбит захоронения отработавших свой жизненный цикл космических аппаратов, границу ниже ГСО высотой перигеев большинства каталогизированных ТКО, а к югу и к северу от ГСО углом наклонения i большинства каталогизированных ТКО, находящихся на геосинхронных орбитах. Причем КА снабжают аппаратурой обнаружения объектов ТКО, определения их угловых координат и параметров движения, аппаратурой получения детальных изображений объектов ТКО, вычислительным комплексом с блоком памяти.
Предлагаемый способ обзора геостационарной области включает определение конфигурации и размеров геостационарной области, в которой будет производиться поиск, обнаружение и получение детальных изображений ТКО.
Анализ данных, приведенных в каталогах НАС A (UCS Satellite Database) [5] и отчете ESOS [6] Classification of geosynchronous objects за 2018 год, с января 2016 года по январь 2021 года показал, что число действующих К А в области геосинхронных орбит постоянно увеличивается: 2016 год - 493 КА, 2018 год - 519 КА, 2019 год - 551 КА, 2021 год - 562 КА.
В отчете ESOS приведено, что всего крупных объектов в области ГСО в 2018 году было 1526. Распределение КА по высотам за эти годы практически не изменилось. Можно предположить, что такая тенденция сохранится и в последующие годы.
По данным каталога НАС А за март 2019 года 80% геостационарных и геосинхронных КА имеют орбиты, апогеи которых расположены в диапазоне высот от 0 до 25 км выше ГСО (35786 км - высота ГСО над поверхностью Земли на экваторе), а их перигеи - в диапазоне высот от 0 до 25 км ниже ГСО. При рассмотрении диапазона высот от 0 до 50 км количество КА, у которых апогеи и перигеи орбит расположены в этом диапазоне соответственно выше и ниже ГСО, увеличивается до 86%. При дальнейшем расширении диапазона высот от 0 до 100 км выше и ниже ГСО количество КА соответственно увеличивается до 93%, а в диапазоне высот от 0 до 200 км выше и ниже ГСО количество КА увеличивается до 96%. Процент количества космических аппаратов в зависимости от расстояния ±h [км] от ГСО, показан на фиг. 1.
Наклонения орбит К А распределяются следующим образом. Около 77% КА имеют наклонение от 0° до 0,14°, что соответствует на высоте ГСО отклонению ~100 км от плоскости экватора. В диапазоне наклонений от 0° до 0,27° (отклонение до ~200 км от плоскости экватора) находятся около 79% КА и около 80% КА, из всех перечисленных в каталоге, имеют наклонение от 0° до 0,4° (отклонение до ~300 км от плоскости экватора). Остальные К А имеют наклонение больше 0,4°.
Следовательно, если ограничить наблюдаемую область космического пространства вблизи ГСО кольцом с поперечным сечением кольца геостационарной области размерами 100 км выше ГСО, 100 км ниже ГСО и ±100 км к северу и югу от плоскости экватора на высоте ГСО, то в этой области будут находиться полностью орбиты 77% КА и остальных крупных объектов, апогеи и перигеи которых располагаются в этом диапазоне высот, а их наклонения не превышает 0,14°.
Если ограничить наблюдаемую область космического пространства кольцом с ПСГО размерами 200 км выше ГСО (выше 200 км находится область захоронения вышедших из строя геостационарных КА), 200 км ниже ГСО и±200 км к северу и югу от плоскости экватора на высоте ГСО, то в этой области будут находиться полностью орбиты 79% КА и остальных крупных объектов, апогеи и перигеи которых располагаются в этом диапазоне высот, а их наклонения не превышает 0,27°. Часть этой геостационарной области схематически показана на фиг. 2.
Если ограничить наблюдаемую область космического пространства кольцом с ПСГО размерами 200 км выше ГСО, 300 км ниже ГСО и ±300 км к северу и югу от плоскости экватора на высоте ГСО, то общее число КА и остальных крупных объектов, апогеи и перигеи которых располагаются в этом диапазоне высот, а их наклонения не превышает 0,4°, увеличится до 80%. Часть этой геостационарной области схематически показана на фиг. 3.
Указанные размеры наблюдаемой ГО могут быть изменены в зависимости от поставленных задач по наблюдению объектов и возможностей оптико-электронной бортовой аппаратуры наблюдения.
Объекты, у которых апогей, перигей и наклонение орбиты превышают выбранные величины ПСГО, будут пересекать кольцевую область космического пространства с указанными поперечными сечениями два раза в сутки и, следовательно, будут в этой области доступны для обнаружения и наблюдения на части их орбит.
Для реализации предлагаемого способа КА размещают на круговой орбите в плоскости экватора или выше ГСО для движения на запад, или ниже ГСО для движения на восток. Сверх того, используют последовательно аппаратуру обнаружения объектов ТКО, определения их угловых координат и параметров движения, а также аппаратуру получения детальных изображений объектов ТКО для сбора информации об объектах космического мусора и других объектах. Кроме того, высоту орбиты КА устанавливают от ГСО на расстоянии h км, определяемом из условий возможности получения аппаратурой детальных изображений наибольшего по имеющимся каталогизированным данным количества ТКО, находящихся в сфере пространства вокруг КА радиусом предельной дальности Rпд получения детальных изображений и обеспечения при этом максимально возможной скорости дрейфа КА (ωдр) относительно ГСО.
Предлагаемый способ обзора ГСО при работе КА в автономном режиме включает выбор орбиты КА для обзора описанной выше геостационарной области.
Обнаружение, определение координат и параметров движения ТКО, а также получение их детальных изображений в геостационарной области с космического аппарата требует выполнения нескольких противоречивых требований:
- обнаружение, определение координат и параметров движения наибольшего количества объектов за минимальное время;
- получение детальных изображений с заданным разрешением выбранных (заданных) объектов для оценки их состояния в данный момент времени;
- обеспечение минимального расхода характеристической скорости при выполнении этих задач для продления времени работоспособности космического аппарата.
Требование минимального расхода характеристической скорости выполняется при установке КА на круговую орбиту в плоскости экватора (или под небольшим углом к ней) выше или ниже высоты ГСО на таком постоянном расстоянии h от ГСО, которое дает возможность получить детальные изображения наибольшего количества объектов, находящихся в описанной выше геостационарной области.
Космический аппарат может получать детальные изображения объектов в пределах сферы космического пространства, описанной вокруг него радиусом, равным предельной дальности получения детальных изображений бортовой аппаратуры наблюдения. Установленный на круговую орбиту в плоскости экватора или с небольшим ее наклонением с радиусом немного меньше или больше радиуса ГСО, КА будет способен в процессе дрейфа относительно ГСО получать детальные изображения всех объектов, пересекающих эту сферу.
Для примера на фиг. 4, фиг. 5 показаны схемы наблюдения для получения детальных изображений ТКО с космического аппарата, движущегося по орбите, лежащей в плоскости экватора ниже ГСО. Так как размер предельной дальности получения детальных изображений мал по сравнению с радиусами орбит близкими к ГСО, на фиг. 4, фиг. 5 изображены участки этих орбит, подлежащие наблюдению, как прямые параллельные линии. Окружность, проведенная радиусом L с К А, находящегося на орбите, отстоящей от ГСО на расстоянии h [км], показывает пространство, где возможно получение детальных изображений наблюдаемых объектов. L - предельная дальность получения детальных изображений, наблюдаемых с КА объектов.
При выборе орбиты КА следует учитывать, что при установке КА для получения детальных изображений объектов на близком расстоянии от ГСО скорость дрейфа КА будет небольшой, и, кроме того, из-за большого количества объектов в этой области есть большая вероятность столкновения КА с ними.
Расчеты показали, что в диапазоне расстояний от ГСО ±(0 - 300) км скорость дрейфа космического аппарата ωдр зависит от расстояния h практически линейно. Поэтому можно приблизительно принять:
ωдр=0,013 h [градус/сутки] при дрейфе КА ниже и выше ГСО.
На расстояниях от ГСО h=10 км скорость дрейфа КА равна 0,13 градус/сутки. Увеличение скорости дрейфа, то есть уменьшение времени обзора всей ГСО или ее заданной части при сохранении возможности получения детальных изображений, требует установки КА на большем расстоянии от ГСО и применения аппаратуры наблюдения с соответствующей дальностью получения детальных изображений.
Чтобы получить изображения 80% объектов на любом участке их орбит, надо иметь аппаратуру получения детальных изображений с дальностью L не менее 50 км и установить К А на расстояние 25 км выше или ниже ГСО. При этом дрейф КА относительно ГСО будет 0,32 градус/сутки, а общее количество наблюдаемых объектов для получения их детальных изображений достигнет 92% (фиг. 4).
Для скорости дрейфа в 1°/сутки КА должен быть поставлен на круговую орбиту на расстоянии h=77,5 км выше или ниже ГСО. При этом аппаратура, способная получать детальные изображения объектов на расстоянии L=100 км, даст возможность получать изображения 96% объектов (фиг. 5).
Таким образом, в зависимости от характеристик аппаратуры наблюдения, определяющих дальность L получения детальных изображений объектов, выбирают такое расстояние h КА от ГСО, (то есть определяют радиус его круговой орбиты, лежащей в плоскости экватора), которое удовлетворяет требованиям наблюдения геостационарной области как по скорости дрейфа КА относительно ГСО (времени обзора всей ГСО или заданной ее части), так и по количеству наблюдаемых объектов.
Все рассуждения относительно выбора орбиты КА относились к случаю, когда орбиты наблюдаемых объектов находятся в плоскости геостационарной орбиты, то есть в плоскости экватора, или имели небольшое наклонение. В случае необходимости наблюдения объектов, расположенных на орбитах, имеющих значительное наклонение, необходимо учитывать, что получение детальных изображений таких объектов возможно только в окрестностях восходящего и нисходящего узлов их орбит, когда кратчайшее расстояние от текущего положения объекта до ГСО не превосходит предельной дальности для получения изображений с требуемым качеством. Продолжительность нахождения объектов на таких участках орбиты ограничена и зависит от наклонения орбиты: чем больше наклонение орбиты, тем меньше продолжительность нахождения объекта в области благоприятных условий для его наблюдения.
Установив орбиту КА, определим условия для обнаружения и определения параметров движения объектов, находящихся в ГО.
Для получения детальных изображений объекта необходимо обнаружение объекта произвести впереди движущегося относительно ГСО КА, определить параметры движения объекта, расстояние от КА до объекта и, зная скорость дрейфа КА, рассчитать время и условия сближения с объектом.
Наблюдение ПСГО, как впереди, так и позади КА, размещенного на орбите около ГСО, дает возможность наблюдать все объекты, орбиты которых находятся в ракурсе наблюдаемых сечений, в любой точке их орбит от перигея до апогея в течение длительного времени (до нескольких суток) и выбирать время наблюдения при наилучших углах освещения объектов Солнцем. Объекты с орбитами, размеры которых и наклонения превышают выбранные величины ПСГО, будут пересекать эту область и в течение этого времени будут наблюдаться два раза в сутки на средних участках их орбит.
Для реализации предлагаемого способа устанавливают поле зрения аппаратуры обнаружения объектов ТКО, определения их координат и параметров движения по направлению движения КА, дрейфующего вдоль геостационарной орбиты, на район, в котором располагается движущееся параллельно с КА ПСГО. Причем расстояние (D) от КА до ПСГО, при которой поле зрения аппаратуры обнаружения, определения координат и параметров движения объектов ТКО полностью накрывает ПГСО определяют как величину, рассчитываемую по формуле D=d/tg (ωпз/2), где d - половина диагонали прямоугольного ПСГО, ωпз - поле зрения аппаратуры обнаружения КА. Далее вычисляют угол наклона θ поля зрения аппаратуры обнаружения КА вниз от вектора скорости КА по формуле θ=arc sin D / 2Rгсо, где радиус ГСО Rгсо равен 42164 км, и наводят аппаратуру обнаружения на выбранное ПСГО.
Обнаружение объектов ГО с выбранным ПСГО производится наведением поля зрения аппаратуры обнаружения объектов на ПСГО впереди движущегося относительного ГСО КА.
Для того, чтобы многочисленные объекты, находящиеся в геостационарной области от КА до района, где находятся обнаруживаемые объекты, не попадали в поле зрения аппаратуры наблюдения, необходимо, чтобы верх поля зрения до наблюдаемого района был ниже области пространства, в котором находится большинство объектов. Граница этой области, как показал анализ каталогов, размещается выше 25 км и 25 км ниже ГСО.
На фиг. 6 показана схема наблюдения ГО, когда КА движется ниже ГСО на восток, а на фиг. 7 - схема наблюдения движения КА выше ГСО на запад.
На схемах приведены следующие обозначения:
ВГ - верхняя граница кольцевой ГО;
НГ - нижняя граница кольцевой ГО;
АБ - поперечное сечение ГО;
ор. КА - орбита КА;
ωпз1, ωпз2 - углы поля зрения аппаратуры обнаружения объектов;
θ1, θ2 - углы наклона поля зрения аппаратуры наблюдения от вектора скорости КА;
CF - расстояния от КА до наблюдаемого поперечного сечения ГО;
e1 g1 и е2 g2 - участки долгот на ГСО, наблюдаемые с КА;
λ1, λ2 - геоцентрические углы, покрывающие участки долгот в ГО, наблюдаемые с КА;
λ3, λ4 - геоцентрические углы, покрывающие участки долгот на ГСО, наблюдаемые с КА.
На фиг. 8, 9, 10 в качестве примеров показаны три варианта размеров поперечного сечения ГО.
Фиг. 8: (+100) км выше и (-100) км ниже ГСО в плоскости экватора;
±100 км к северу и югу от плоскости экватора.
В этом поперечном сечении ГО находится 92% космических аппаратов, у которых большая полуось орбит размещается в этих пределах, и 77% КА с наклонениями не более 0,14°.
Фиг. 9: (+200) км выше и (-200) км ниже ГСО в плоскости экватора;
±200 км к северу и югу от плоскости экватора.
В этом поперечном сечении ГО находится 95% космических аппаратов, у которых большая полуось орбит размещается в этих пределах, и 79% КА с наклонениями не более 0,27°.
Фиг. 10: (+200) км выше и (-300) км ниже ГСО в плоскости экватора;
±300 км к северу и югу от плоскости экватора.
В этом поперечном сечении ГО находится 97% космических аппаратов, у которых апогеи и перигеи размещаются в этих пределах, и 80% КА с наклонениями не более 0,4°.
Расстояние от КА до ПСГО определяют в зависимости от размеров поля зрения аппаратуры обнаружения КА (ПЗАО), в которые вписывается полностью все поперечное сечение ГО. Предположим, что приемная квадратная матрица полностью вписана в поле зрения телескопа.
На фиг. 11:
d - диаметр круга, в который полностью входит ПСГО;
ωпз - угол поля зрения бортовой аппаратуры обнаружения;
D - расстояние от КА до наблюдаемого ПС ГО.
Из рисунка следует: D=d/2tg(ωпз/2).
Для вариантов (а), (б), (в) рассчитанные расстояния D при ωпз=1°; 2°; 3°; 4°; 5°; 6° приведены в таблице:
Величины расстояний от К А до наблюдаемых поперечных сечений в зависимости от их размеров и углов поля зрения аппаратуры обнаружения показаны на графиках фиг. 12.
Определив расстояние D до наблюдаемого ПСГО, рассчитывают угол наклона поля зрения аппаратуры обнаружения от вектора скорости КА для наведения поля зрения аппаратуры обнаружения на ПСГО.
Из геометрии известно, что величина угла, образованного касательной и хордой, проходящей через точку касания, равна половине величины дуги, закрепленной между его сторонами. В данном случае хордой является рассчитанное расстояние D. Таким образом определяют угол наклона θ поля зрения аппаратуры обнаружения вниз от вектора скорости КА по формуле θ=arc sin D / 2Rгсо, где радиус ГСО Rгсо=42164 км.
Имея данные о размере поля зрения аппаратуры обнаружения ωпз и угле наклона поля зрения θ от вектора скорости КА, наводят аппаратуру обнаружения на ПСГО, находящееся на рассчитанном расстоянии D от КА.
КА, установленный на круговую орбиту ниже или выше ГСО, отличающуюся от ГСО на h км, дрейфует вдоль ГСО со скоростью ωдр=0.013⋅h [градус/сутки] и производит регулярный обзор движущегося вместе с ним на расстоянии D поперечного сечения ГО. Обнаруженные объекты по критериям, заложенным в вычислительный комплекс, селектируют от помех, выбирают объекты для получения их детальных изображений, рассчитывают время до сближения с ними, в рассчитанное время наводят поочередно на них аппаратуру получения детальных изображений. После получения детальных изображений заносят полученную информацию в блок памяти и возобновляют обзор поперечного сечения ГО.
В автономном режиме работы КА при сеансах связи с пунктом управления передает всю полученную информацию и принимает новые данные для пополнения каталога объектов в бортовом компьютере.
В режиме управления КА командами с пункта управления, оптико-электронная аппаратура обнаружения наводится в заданную точку космического пространства, обнаруживает объект и выполняет все операции по определению его координат и параметров движения, которые передают на пункт управления. Кроме того, пункт управления при необходимости передает команды для совершения маневра КА для сближения с заданным объектом и получения его детальных изображений. Источники информации.
1. Черный И. Запущен спутник контроля космической обстановки. Новости космонавтики. №11. 2010. С.34-36.
2. Клименко Н.Н., Назаров А.Е. Перспективная космическая система для наблюдения геостационарной орбиты. «Вестник «НПО им. С.А. Лавочкина». №4. 2015. С.16-22.
3. Патент РФ №2659379 «Способ обзора геостационарной области для наблюдения элементов космического мусора и других объектов с космического аппарата на полусуточной высокоэллиптической орбите».
4. Патент РФ №2684253 «Способ обнаружения и контроля космического мусора вблизи геостационарной орбиты».
5. http://www.ucsusa.org/nuclear-weapons/space-weapons/satellite-database
6. Classification of geosynchronous objects ESOS 08.2018.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обзора геостационарной области для наблюдения элементов космического мусора и других объектов с космического аппарата на полусуточной высокоэллиптической орбите | 2017 |
|
RU2659379C1 |
| Способ обнаружения и контроля космического мусора вблизи геостационарной орбиты | 2018 |
|
RU2684253C1 |
| Космическая система обзора небесной сферы для наблюдения небесных объектов и обнаружения опасных для Земли небесных тел - астероидов и комет | 2015 |
|
RU2610066C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕКТОРА СОСТОЯНИЯ ПАССИВНОГО КОСМИЧЕСКОГО ОБЪЕКТА | 2013 |
|
RU2542836C2 |
| СПОСОБ УДАЛЕНИЯ С ГЕОСТАЦИОНАРНОЙ ОРБИТЫ НЕФУНКЦИОНИРУЮЩЕГО КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2559392C1 |
| МНОГОМОДУЛЬНЫЙ КОСМИЧЕСКИЙ АППАРАТ ДЛЯ ОЧИСТКИ ГЕОСТАЦИОНАРНОЙ ОРБИТЫ И СПОСОБ ОЧИСТКИ ГЕОСТАЦИОНАРНОЙ ОРБИТЫ | 2014 |
|
RU2573015C2 |
| Космическая система обзора небесной сферы для обнаружения небесных тел | 2015 |
|
RU2621464C1 |
| СПОСОБ ОБЗОРА НЕБЕСНОЙ СФЕРЫ С КОСМИЧЕСКОГО АППАРАТА ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И КОСМИЧЕСКАЯ СИСТЕМА ОБЗОРА НЕБЕСНОЙ СФЕРЫ ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И ОБНАРУЖЕНИЯ ТЕЛ СОЛНЕЧНОЙ СИСТЕМЫ, РЕАЛИЗУЮЩАЯ УКАЗАННЫЙ СПОСОБ | 2012 |
|
RU2517800C1 |
| СПОСОБ УВОДА КОСМИЧЕСКОГО АППАРАТА, ЗАВЕРШИВШЕГО АКТИВНОЕ ФУНКЦИОНИРОВАНИЕ С ГЕОСТАЦИОНАРНОЙ ОРБИТЫ | 2023 |
|
RU2824862C1 |
| СПОСОБ РАЗМЕЩЕНИЯ КОСМИЧЕСКОГО АППАРАТА НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2480384C2 |




Изобретение относится к космической технике и может быть использовано при создании космических средств и систем обзора геостационарной области для получения детальных изображений объектов космического мусора (КМ), находящихся на геостационарной орбите (ГСО) или периодически сближающихся с ней. Обзор производится с КА, работающего в автономном или управляемом режиме с пункта управления полетом. В автономном режиме КА движется вдоль ГСО ниже или выше ГСО по орбите, параметры которой рассчитывают в зависимости от характеристик аппаратуры, определяющих максимальную дальность получения детальных изображений объекта. В автономном режиме аппаратуру обнаружения объектов наводят на область пространства, расположенную впереди КА вокруг геостационарной орбиты. Эта область ограничена как по высоте, выше и ниже ГСО, так и к северу и югу в перпендикулярном к плоскости экватора направлении. Размеры этой области определяются исходя из анализа имеющихся каталогизированных техногенных космических объектов на геостационарных и геосинхронных орбитах. Обнаружив объекты и определив их текущие координаты и параметры движения, наводят аппаратуру получения детальных изображений на выбранный объект, получают его детальные изображения и заносят полученные данные в блок памяти КА. Повторяют цикл наблюдений. Информацию передают по радиолинии при сеансах связи на пункт управления полетом КА. В режиме управления КА командами с пункта управления полетом аппаратуру обнаружения объектов наводят в заданные небесные координаты, обнаруживают объект и выполняют все операции по определению его координат и параметров движения, которые передают на пункт управления. Пункт управления полетом при необходимости передает команды для совершения маневра КА для сближения с заданным техногенным объектом и получения его детальных изображений. Определяются размеры области космического пространства, подлежащей наблюдению. Определяются координаты и параметры движения обнаруженных объектов, получают их детальные изображения. 3 з.п. ф-лы, 12 ил.
1. Способ обзора геостационарной области для обнаружения и наблюдения космического мусора с космического аппарата, при котором космический аппарат размещают около геостационарной орбиты, снабжают системой угловой стабилизации и ориентации, системой электропитания, системой терморегулирования, аппаратурой передачи и приема данных, выполненной с возможностью осуществления связи с наземным пунктом управления полетом космического аппарата (КА), отличающийся тем, что размеры области наблюдения геостационарной области (ГО) выбирают по результатам анализа каталогизированных техногенных космических объектов (ТКО), находящихся в ГО, при этом форму области наблюдения ГО задают в виде кольца или части кольца прямоугольного поперечного сечения геостационарной области (ПСГО), располагаемого вдоль геостационарной орбиты (ГСО), в котором находятся полностью от апогея до перигея большинство орбит каталогизированных ТКО, кроме того, устанавливают границу ПСГО выше ГСО не более 200 км, определяемую высотой орбит захоронения отработавших свой жизненный цикл космических аппаратов, границу ниже ГСО высотой перигеев большинства каталогизированных ТКО, а к югу и к северу от ГСО углом наклонения i большинства каталогизированных ТКО, находящихся на геосинхронных орбитах, при этом КА снабжают аппаратурой обнаружения объектов ТКО, определения их угловых координат и параметров движения, аппаратурой получения детальных изображений объектов ТКО, вычислительным комплексом с блоком памяти, причем КА размещают на круговой орбите в плоскости экватора или выше ГСО для движения на запад, или ниже ГСО для движения на восток, причем используют последовательно аппаратуру обнаружения объектов ТКО, определения их угловых координат и параметров движения, а также аппаратуру получения детальных изображений объектов ТКО для сбора информации об объектах космического мусора, кроме того, высоту орбиты КА устанавливают от ГСО на расстоянии h км, определяемом из условий возможности получения аппаратурой детальных изображений наибольшего, по имеющимся каталогизированным данным, количества ТКО, находящихся в сфере пространства вокруг КА радиусом предельной дальности Rпд получения детальных изображений, и обеспечения при этом максимально возможной скорости дрейфа КА (ωдр) относительно ГСО, устанавливают поле зрения аппаратуры обнаружения объектов ТКО, определения их координат и параметров движения по направлению движения КА, дрейфующего вдоль геостационарной орбиты на район, в котором располагается движущееся параллельно с КА ПСГО, причем расстояние (D) от КА до ПСГО, при которой поле зрения аппаратуры обнаружения, определения координат и параметров движения объектов ТКО полностью накрывает ПГСО, определяют как величину, рассчитываемую по формуле D=d/tg (ωпз/2), где d - половина диагонали прямоугольного ПСГО, ωпз - поле зрения аппаратуры обнаружения КА, вычисляют угол наклона θ поля зрения аппаратуры обнаружения КА вниз от вектора скорости КА по формуле θ=arc sin D/2Rгсо, где радиус ГСО Rгсо равен 42164 км, и наводят аппаратуру обнаружения на выбранное ПСГО, производят обзор ПСГО, обнаруживают, селектируют от звезд искомые объекты ТКО, определяют параметры их движения, сравнивают с имеющимися данными в блоке памяти вычислительного комплекса КА, выбирают из обнаруженных объекты ТКО для получения их детальных изображений, рассчитывают время сближения с ними, в расчетное время наводят аппаратуру получения детальных изображений объектов на выбранный объект ТКО, получают его детальные изображения, полученные данные заносят в блок памяти вычислительного комплекса КА, затем возобновляют обзор поперечного сечения геостационарной области, а при сеансах связи по радиолинии передают полученную информацию на пункт управления полетом КА.
2. Способ обзора геостационарной области по п. 1, отличающийся тем, что по завершении наблюдения части кольца ПСГО при расположении КА на орбите выше или ниже ГСО осуществляют перевод КА на орбиту ниже или выше ГСО соответственно, наводят аппаратуру обнаружения на выбранное ПСГО, производят обзор ПСГО, обнаруживают, селектируют от звезд искомые объекты ТКО, определяют параметры их движения, сравнивают с имеющимися данными в блоке памяти вычислительного комплекса КА, выбирают из обнаруженных объекты ТКО для получения их детальных изображений, рассчитывают время сближения с ними, в расчетное время наводят аппаратуру получения детальных изображений объектов на выбранный объект ТКО, получают его детальные изображения, полученные данные заносят в блок памяти вычислительного комплекса КА, затем возобновляют обзор поперечного сечения геостационарной области, а при сеансах связи по радиолинии передают полученную информацию на пункт управления полетом КА, причем маневр КА вверх-вниз повторяют до поступления новой команды с пункта управления полетом КА.
3. Способ обзора геостационарной области по п. 1, отличающийся тем, что в режиме управления с КА с пункта управления полетом КА аппаратуру обнаружения наводят по небесным координатам, передаваемым на КА с пункта управления полетом КА, производят обзор в заданных координатах, обнаруживают объект ТКО, определяют его координаты и параметры движения и полученные данные по радиолинии передают на пункт управления полетом КА.
4. Способ обзора геостационарной области по п. 1, отличающийся тем, что по командам, передаваемым с пункта управления полетом КА, меняют орбиту полета КА, переходят на режим сближения с заданным объектом, по достижении необходимого расстояния наводят аппаратуру получения детальных изображений на заданный объект и полученные изображения по радиолинии передают на пункт управления полетом КА.
| Способ обнаружения и контроля космического мусора вблизи геостационарной орбиты | 2018 |
|
RU2684253C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ ПРОЦЕССА УДАЛЕНИЯ КОСМИЧЕСКОГО МУСОРА | 2018 |
|
RU2689088C1 |
| СПОСОБ ФОРМИРОВАНИЯ ГРУППИРОВКИ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ ДЛЯ МОНИТОРИНГА ПОТЕНЦИАЛЬНО ОПАСНЫХ УГРОЗ В ОКОЛОЗЕМНОМ КОСМИЧЕСКОМ ПРОСТРАНСТВЕ В РЕЖИМЕ, БЛИЗКОМ К РЕАЛЬНОМУ ВРЕМЕНИ | 2018 |
|
RU2711554C1 |
| WO 2017088062 A1, 01.06.2017 | |||
| WO 2012134929 A2, 04.10.2012. | |||

