Изобретение относится к сельскому хозяйству, в частности, автоматизации контроля процессов кормления в животноводстве, системе и способу определения качества и количества корма, при автоматизированном кормлении.
Известное из заявки на изобретение US 20140036054 A1, МПК G06T7/0012, от 28.03.2013, техническое решение характеризует портативные системы визуализации, реализованные на цифровом процессоре в виде системы для идентификации или классификации интересующего объекта на теле человека или на растениях. Системы содержат портативное устройство формирования изображения, такое как интеллектуальное устройство, и библиотеку алгоритмов или модулей, которые могут быть реализованы на нем для обработки отображаемого объекта, извлечения из него репрезентативных признаков и классификации объекта на основе характерных признаков. Также предусмотрены методы для идентификации или классификации интересующего объекта на теле, которые используют алгоритмы и автоматизированную портативную систему, сконфигурированную для их реализации.
Недостатком известного решения является, то, что устройство способно осуществлять только идентификацию инородных предметов в однородной среде. В устройстве отсутствует беспроводной блок связи с персональным компьютером, система не может быть использована для решения задач в сфере кормления крупного рогатого скота и приготовления кормов.
Известная из патента US 10401147 B2, МПК G01B 11/04, от 10.05.2005, система определения размеров определяет показатели объема объекта с помощью трехмерной камеры, которая измеряет расстояние до каждой отражающей точки в своем поле зрения с помощью одного светового импульса. Расстояние вычисляется по времени прохождения импульса до каждого пикселя камеры. Точность измерения увеличивается за счет захвата формы лазерного импульса в каждом пикселе камеры. Камеру можно использовать на сборочной линии для разработки данных контроля качества для производимых объектов или на движущейся или стационарной системе, которая взвешивает, а также определяет размеры объектов. Устройство также может определить минимальный размер коробки, необходимой для помещения объекта.
Недостатком известного решения является ограниченное количество функций (определение объёма объекта). Перечень используемых технических средств является сложным и требует больших вычислительных мощностей для обработки входящих данных. Также на конечный результат могут влиять факторы внешней среды.
Из патента US 8755570 B2, МПК G06K 9/00, от 27.04.2011, известна система взвешивания животных (например, крупных сельскохозяйственных животных или животных с ранчо), которая автоматически оценивает с помощью простого устройства для получения изображений. Например, программируемой цифровой фотокамерой или цифровой видеокамерой вместе с методами анализа изображений. Система, подходящая либо для автономной обработки, либо для интеграции в компьютеризированную систему управления фермой или ранчо, включает модуль, который может быть либо встроен в такое устройство получения изображений, либо в обычный компьютер, который сам может быть хостом в локальной сети. В одном примере анализ изображения включает в себя: определение местоположения животного на изображении; определение контура его тела с помощью ориентиров и извлечения связанных признаков; получение нескольких величин, которые вместе взятые, тесно коррелируют с массой животных, и установление статистической взаимосвязи между этими величинами и массой.
Недостатком известного решения является то, что система проводит анализ только самого животного, не рассматривая внешние факторы такие как качество и количество кормов.
Наиболее близкой по технической сущности к заявляемой системе является система, известная из патента US 10420328 B2, МПК A01K 29/005, от 24.09.2019. Изобретение относится к системе мониторинга животных для определения потребления корма одним или несколькими животными, кормящимися в зоне кормления, содержит блок формирования изображения для получения изображения области кормления, средство идентификации, сконфигурированное для уникальной идентификации каждого кормящего животного, и средство обработки, сконфигурированное для оценки количества корма, потребляемого каждым идентифицированным животным путем определения уменьшения количества корма на последующих изображениях зоны кормления перед каждым идентифицированным животным.
Недостатком известной системы является недостаточное качество оценки корма для животных из-за невозможности определения компонентного состава кормовой смеси системами технического зрения, в том числе, с применением нейросетевых алгоритмов. Также к недостаткам системы относится возможность ее использования только в стационарных условиях.
Техническим результатом предложенного изобретения является повышение качества оценки корма для животных посредствам использования системы технического зрения при роботизированном кормлении.
Технический результат достигается тем, что система для оценки качества корма животных, содержащая оптическую камеру, 3-D камеру и интерфейсный блок управления, включающий блок обработки информации, согласно изобретению, система снабжена сервером с облачным хранилищем, содержащим базу данных со спектральной информацией об эталонных образцах компонентов корма отсканированных объектов, корпусом в котором размещены 3-D камера, оптическая камера и интерфейсным блоком управления, с модулем захвата изображений, цифровыми и аналоговыми выводами и модулем беспроводной связи, а объектив оптической камеры снабжен светофильтрами и диодной подсветкой.
В частных случаях реализации корпус с камерами и интерфейсным блоком управления, выполнен с возможностью монтажа на роботе-кормораздатчике.
Изобретение поясняется чертежами.
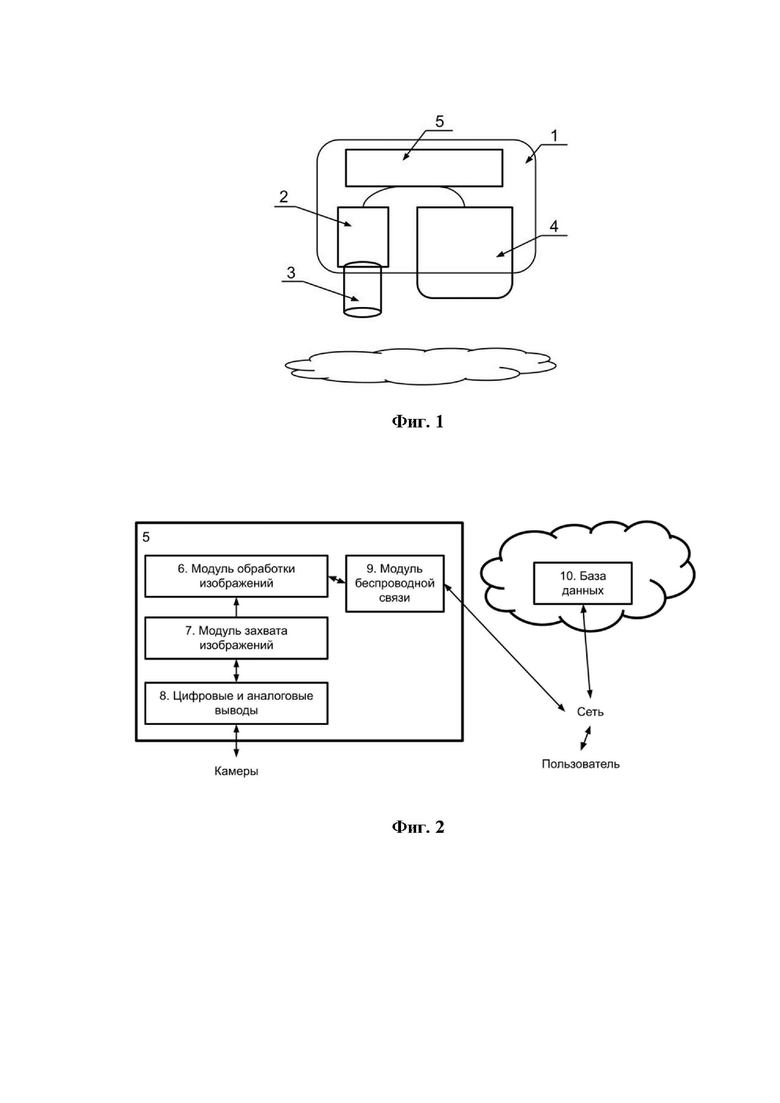
На фиг. 1 представлена принципиальная схема устройства для оценки качества корма животных; на фиг. 2 – блок-схема системы для оценки качества корма животных.
Система для оценки качества корма животных включает корпус 1, в одной части которого размещена оптическая камера 2, совмещенная с объективом 3, имеющим светофильтры и диодную подсветку. В другой части корпуса 1, размещена 3-D камера 4. В верхней части корпуса 1 размещен интерфейсный блок управления 5, который соединен по линиям проводной и беспроводной связи с оптической камерой 2 и 3-D камерой 4.
Интерфейсный блок управления 5 содержит модуль обработки изображений 6, модуль захвата изображений 7, цифровые и аналоговые выводы 8 и модуль беспроводной связи 9.
Система снабжена сервером с облачным хранилищем, содержащим базу данных 10 со спектральной информацией об эталонных образцах компонентов корма отсканированных объектов.
Система для оценки качества корма животных работает следующим образом.
Подзаряжают аккумулятор системы питания, размещенный в интерфейсном блоке управления 5, посредствам проводного или беспроводного зарядного устройства, после достижения достаточного уровня заряда в аккумуляторе на дисплее интерфейсного блока управления 5 отображается информация о готовности к работе сопровождаемая звуковым сигналом.
На интерфейсный блок управления 5 подается команда пуск, активируется модуль захвата изображений 7, где формируются команды камерам. С помощью цифровых и аналоговых выводов 8 команды о начале работы камер («включение», «снимок») передаются на 2 и 3-D камеры 4. Устройство для оценки качества корма животных готово к работе.
Корпус 1 размещают таким образом, чтобы фокусировки объектива 3 и 3-D камеры 4 полностью покрывала объект сканирования или необходимый участок, которым может являться смешанная многокомпонентная кормовая смесь для животных, состоящая из различных комбикормов, кукурузного силоса, сенажа многолетних и однолетних трав. На объектив 3 устанавливают необходимый светофильтр и включают диодную подсветку, обеспечивая возбуждение флуоресценции корма, который содержит хлорофиллы. 3-D камера 4 осуществляет построение облака точек, характеризующих геометрические показатели объекта сканирования. Оптическая камера 2 делает снимок объекта сканирования, тем самым получая цветовые характеристики объекта сканирования. Модуль захвата изображений 7 получает изображения с обеих камер и передаёт в модуль обработки изображений 6, который рассчитывает объём корма на участке кормового стола, процентное содержание объёмистых и концентрированных компонентов в составе смеси, а также определяет пригодность корма к потреблению животными.
Полученная информация об объекте сканирования с помощью модуля беспроводной связи 9 передается пользователю и сохраняется в базе данных 10 сервера с облачным хранилищем.
Корпус 1 содержит быстросъёмный крепёж (адаптер), позволяющий жёстко крепить корпус 1 на робот-кормораздатчик или на настольный штатив, крепящийся к кормовому столу.
Модуль обработки изображений 6 позволяет оценивать качество смешивания компонентов, входящих в объект сканирования, и выявляет грибковые образования и гнилостные процессы на основе цветовых характеристик.
База данных цветовых характеристик формируется в сервере с облачным хранилищем и содержит спектральную информацию об эталонных образцах компонентов корма, таких как кукурузный силос, сенаж многолетних и однолетних трав, комбикорм и др.
В процессе использования устройства при сканировании корма полученная спектральная информация отправляется автоматически в базу данных и обучает нейросеть, которая осуществляет определение качественных показателей корма, это позволяет производить наиболее эффективное выявление испорченного корма находящегося на кормовом столе животноводческого комплекса и своевременно получать сигналы о выполнение необходимых действий.
Для эффективности обработки получаемых характеристик, интерфейсный блок управления 5 содержит модуль беспроводной связи, цифровые и аналоговые выводы, обеспечивающие связь с базой данных, которая хранит и коррелирует показатели ранее сканируемых объектов.
Посредствам использования 3-D камеры, объектива со светофильтрами и диодной подсветки на оптической камере, устройство осуществляет оптический анализ качества корма животных, на основе цветовых и геометрических показателей. Устройство многофункционально и может монтироваться на различные смесители кормов, в том числе роботизированные для оценки качества приготовления кормовых смесей, использоваться статично в лаборатории, а также монтироваться на надхолмочный брус кормового стола на животноводческих комплексах для оценки динамики потребления кормов животными в том числе КРС.
Пример.
Корпус 1 размещают таким образом, чтобы фокусировки объектива 3 и 3-D камеры 4 полностью покрывала ширину кормового стола. Система для оценки качества корма животных выполнена с возможностью монтажа с помощью специального адаптера, позволяющего жёстко крепить корпус 1 на робот-кормораздатчик (например, Lely Vector).
Кормовая смесь для крупного рогатого скота состоит из объёмистых растений (кукурузный силос, сено, сенаж многолетних и однолетних трав), содержащих хлорофиллы, и концентрированных (подсолнечный, соевый и рапсовый широты, зерновой размол), в которых хлорофиллы отсутствуют.
На объектив 3 устанавливается необходимый светофильтр и включается диодная подсветка, обеспечивающая возбуждение флуоресценции корма, который содержит хлорофиллы, что, в свою очередь, позволяет наиболее чётко выделять из общей массы объёмистые и концентрированные компоненты кормовой смеси и наиболее эффективно анализировать качественные показатели.
3-D камера 4 осуществляет построение облака точек, характеризующих геометрические показатели объекта сканирования. Оптическая камера 2 производит снимок объекта сканирования, тем самым получая цветовые характеристики объекта сканирования. При использовании диодной подсветки и светофильтра концентрированные компоненты приобретают наиболее выраженные оттенки цвета, а объёмистые компоненты остаются неизменными. В случае снижения качественных показателей световая интенсивность испорченных компонентов (подвергшихся гниению или грибковой плесени) уменьшается.
Полученная информация о качестве компонентов корма служит рекомендацией по установлению режимов работы дозаторов корма, если испорченность корма достигает критической точки, то работа робота кормораздатчика приостанавливается и подается сигнал о необходимости извлечения испорченного корма.
Использование системы позволит повысить качество оценки корма для животных за счет бесконтактной технологии и автоматизации процесса оценки, которая не требует специальной пробоподготовки. Преимуществом предлагаемой системы является унификация и возможность её использования в условиях лаборатории, а также на различных устройствах дозирования корма и роботах кормораздатчиках.
| название | год | авторы | номер документа |
|---|---|---|---|
| Оптическая система управления процессом приготовления и раздачи кормовой смеси | 2023 |
|
RU2817884C1 |
| Компактный спектральный измеритель качественных показателей кормов | 2021 |
|
RU2781751C1 |
| Роботизированный кормораздатчик | 2024 |
|
RU2821552C1 |
| Роботизированное устройство для обслуживания кормового стола на животноводческих комплексах | 2020 |
|
RU2747167C1 |
| Способ раздачи зерновой смеси крупному рогатому скоту на откорме | 2022 |
|
RU2791733C1 |
| СПОСОБ ДИАГНОСТИКИ ВОЗБУДИТЕЛЕЙ ИНФЕКЦИОННЫХ И ПАРАЗИТАРНЫХ БОЛЕЗНЕЙ И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2123682C1 |
| УНИВЕРСАЛЬНО-РАСПРЕДЕЛЕННАЯ ГИБРИДНАЯ СИСТЕМА УПРАВЛЕНИЯ КОЛЛАБОРАТИВНЫМ МНОГОЦЕЛЕВЫМ РОБОТОМ С МАШИННЫМ ЗРЕНИЕМ | 2018 |
|
RU2710709C1 |
| Способ и устройство для бесконтактного сканирования биологических объектов | 2021 |
|
RU2769671C1 |
| АВТОНОМНОЕ МОБИЛЬНОЕ УНИВЕРСАЛЬНОЕ УСТРОЙСТВО, ОБЕСПЕЧИВАЮЩЕЕ ОДНОВРЕМЕННО СЧИТЫВАНИЕ ШТРИХОВЫХ КОДОВ И RFID-МЕТОК И ОДНОВРЕМЕННУЮ ФИКСАЦИЮ РЕАЛЬНОГО ВРЕМЕНИ И ГЕОГРАФИЧЕСКИХ КООРДИНАТ МЕСТА СКАНИРОВАНИЯ | 2014 |
|
RU2580989C1 |
| СИСТЕМЫ И СПОСОБЫ НАБЛЮДЕНИЯ В НОЧНОЕ ВРЕМЯ | 2006 |
|
RU2452033C2 |
Изобретение относится к приборам для анализа материалов при помощи оптических средств. Технический результат заключается в повышении качества оценки корма для животных. Технический результат достигается за счет того, что система для оценки качества корма животных снабжена сервером с облачным хранилищем, содержащим базу данных со спектральной информацией об эталонных образцах компонентов корма отсканированных объектов, корпусом, в котором размещены 3-D камера, оптическая камера, и интерфейсным блоком управления с модулем захвата изображений, цифровыми и аналоговыми выводами и модулем беспроводной связи, а объектив оптической камеры снабжен светофильтрами и диодной подсветкой. 1 з.п. ф-лы, 2 ил.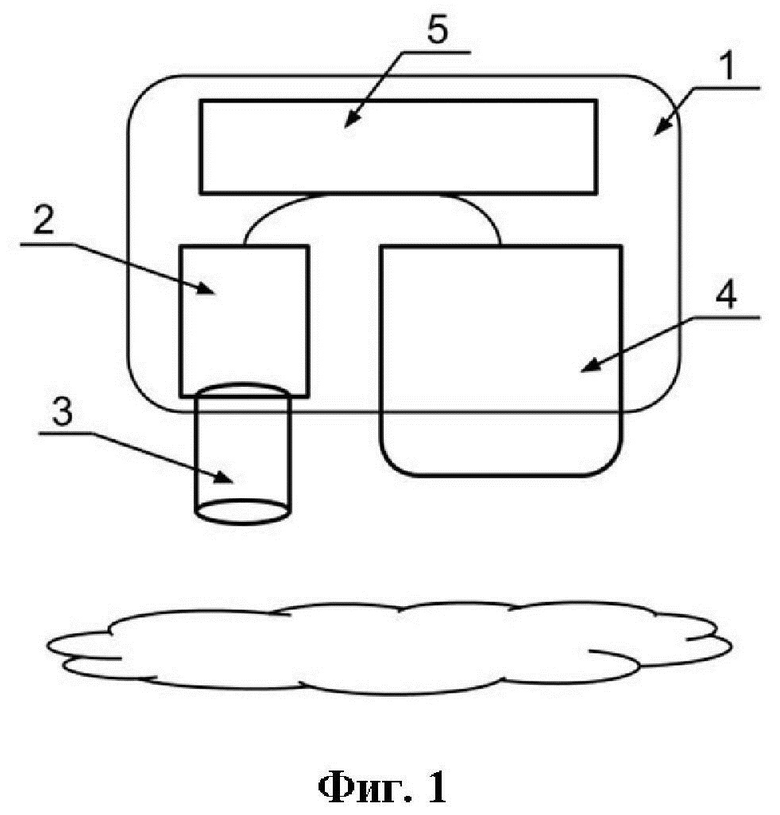
1. Система для оценки качества корма животных, включающая оптическую камеру, 3-D камеру и интерфейсный блок управления, содержащий модуль обработки изображений, отличающаяся тем, что она снабжена сервером с облачным хранилищем, содержащим базу данных со спектральной информацией об эталонных образцах компонентов корма отсканированных объектов, корпусом, в котором размещены 3-D камера, оптическая камера, и интерфейсным блоком управления, с модулем захвата изображений, цифровыми и аналоговыми выводами и модулем беспроводной связи, а объектив оптической камеры снабжен светофильтрами и диодной подсветкой.
2. Система для оценки качества корма животных по п. 1, отличающаяся тем, что корпус с камерами и интерфейсным блоком управления выполнен с возможностью монтажа на роботе-кормораздатчике.
| Фрикционная паровая турбина | 1932 |
|
SU28910A1 |
| СИСТЕМА УПРАВЛЕНИЯ РОБОТИЗИРОВАННЫМ МИКСЕРОМ-КОРМОРАЗДАТЧИКОМ | 2014 |
|
RU2585043C2 |
| EP 2978305 A2, 03.02.2016 | |||
| CN 109006538 A, 18.12.2018 | |||
| US 8307785 B2, 13.11.2013. | |||

