Предложенное изобретение относится к области управления угловым движением космических аппаратов (КА). В основе такого управления лежит процесс определения угловой ориентации КА относительно какого-либо базиса.
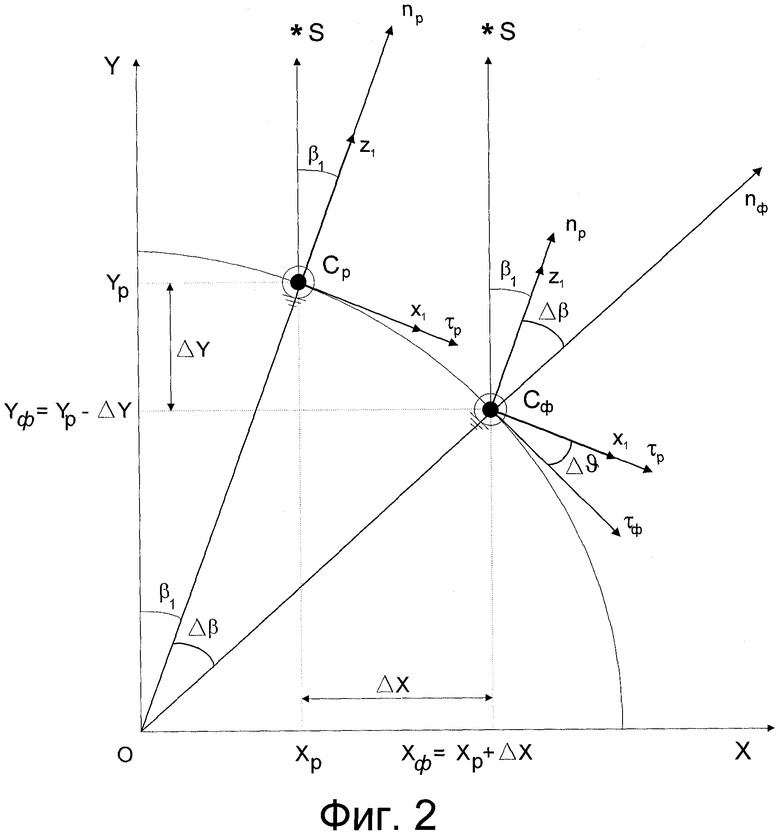
Для решения большинства целевых задач в космосе чаще всего на практике используется ориентация КА в подвижной орбитальной системе координат (ПОСК), начало которой (точка А) совмещается с центром масс КА, одна из осей (τ) лежит в плоскости орбиты и направлена перпендикулярно текущему радиусу-вектору в сторону движения, другая ось (b) коллинеарна вектору кинетического момента орбитального движения КА, третья ось (n) направлена по радиусу-вектору г. Угловое положение КА относительно его центра масс однозначно определяется углами положения связанной с корпусом КА системы координат Ax1y1z1 относительно ПОСК, т.е. углами тангажа ϑ, рыскания ψ и крена γ (фиг.1).
Точность определения углов ориентации при таком подходе зависит не только от погрешностей угловых измерений, но и от погрешностей определения положения центра масс КА в пространстве, т.е. от погрешностей навигационного канала.
Известны способы управления угловым движением [1-4], основанные на определении ориентации КА с помощью гиростабилизированной платформы (ГСП) или с помощью бесплатформенных инерциальных систем с применением астрономической коррекции. Однако неизбежные погрешности бортовых измерений и другие источники помех приводят к существенным ошибкам решения как задач навигации КА, так и, следовательно, задач ориентации КА.
Наиболее близким к предложенному по составу измерений является способ определения параметров движения центра масс КА [5], заключающийся в измерении зенитных расстояний двух звезд и высоты полета над поверхностью планеты. Под зенитным расстоянием понимается угол между направлением на центр Земли и направлением на звезду. Измерение высоты полета КА и определение направления на центр планеты осуществляется с помощью построителя местной вертикали - радиовертикали-высотомера (РВВ). Направления на звезды определяются двумя астровизирующими устройствами (АВУ). Недостатком данного способа является низкая точность определения параметров поступательного и углового движения КА, где предельные ошибки соответствуют следующим величинам:
- по каналу навигации [5]:
- по высоте полета 150 м;
- по дальности (вдоль орбиты) 6000 м;
- по боковой координате (по нормали к плоскости орбиты) 1500 м;
- по каналу ориентации [2]:
- по тангажу 25 угловых минут;
- по рысканию 10 угловых минут;
- по крену 15 угловых минут.
Целью изобретения является повышение точности ориентации КА.
Поставленная цель достигается использованием аппаратуры высокоточной глобальной спутниковой навигационной системы (СНС) типа “ГЛОНАСС” для определения координат центра масс КА в геоцентрической экваториальной системе координат (ГЭСК).
Сущность изобретения заключается в следующем. Углы отклонения связанной системы координат относительно ПОСК определяются путем:
- измерения углов положения оптических осей двух АВУ, следящих за звездами, относительно корпуса КА;
- вычисления направляющих косинусов визируемых звезд в ГЭСК;
- определения текущих координат центра масс КА с использованием аппаратуры потребителя глобальной СНС типа “ГЛОНАСС”;
- математической обработки полученной информации по алгоритмам, приведенным, например, в [8].
Поскольку погрешность определения координат центра масс КА с использованием СНС типа “ГЛОНАСС” составляет 10 м [6, 7], составляющая погрешности ориентации КА вследствие этого не превысит долей угловой секунды. Рассмотрим это подробнее.
Для упрощения доказательства будем считать, что задача системы ориентации состоит в совмещении осей связанной системы координат X1, Y1, Z1 с осями ПОСК τ, b, n соответственно, т.е. в поддержании нулевых значений углов ориентации  .
.
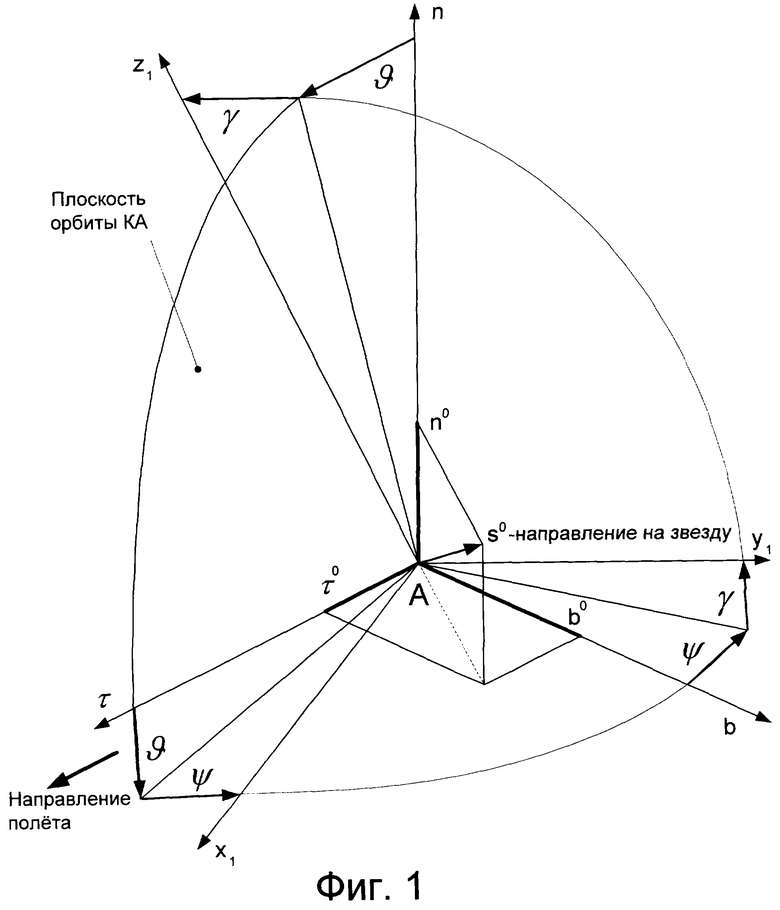
Рассмотрим “плоскую” задачу, когда движение происходит в плоскости XY (фиг.2).
Пусть Ср - расчетная точка местоположения КА с координатами Хр, Yp; Сф - фактическая точка местоположения с координатами Хф, Уф. Положение подвижных осей τ, n в расчетной точке Ср устанавливается по измерениям зенитного угла βр звезды S (известной). В точке Сф фактического местоположения КА появляется погрешность Δϑ≠0 угла тангажа, величина которой определяется ошибками координат центра масс:
ΔХ=Хф-Хр;
ΔY=Yp-Уф.
Расчетное значение зенитного угла β1 определяется формулой [3]:
где  - модуль радиуса-вектора, а0, b0, c0 - известные направляющие косинусы орта визируемой звезды.
- модуль радиуса-вектора, а0, b0, c0 - известные направляющие косинусы орта визируемой звезды.
Совместим для упрощения расчетов ось Y с направлением на звезду S. Тогда
a0=c0=0, b0=1.
При этом получим:



В предположении достаточной малости отклонений ΔX, ΔY, Δβ, Δϑ получаем:

Для высоты полета Н≈200 км:
r=R3+Н=6570 км, где R3 радиус Земли;
При β1=0, Х=0, Y=r получаем
 или т.к. Δβ=Δ
или т.к. Δβ=Δ имеем окончательно
имеем окончательно 
Если аппаратура потребителя СНС “ГЛОНАСС” определяет местоположение с ошибкой ΔX=10 м, то Δ =1,5·10-6 рад = 0,3 угловой сек.
=1,5·10-6 рад = 0,3 угловой сек.
Тогда как ошибка ориентации у прототипа по углу тангажа составляет 25 угловых мин [2].
Таким образом, предлагаемый способ позволит существенно повысить точность ориентации КА за счет использования при решении навигационной задачи более точных измерений координат центра масс КА с использованием СНС “ГЛОНАСС”.
Источники информации
1. А.П.Разыграев. Основы управления полетом космических аппаратов. - М.: Машиностроение, 1990.
2. В.В.Смирнов, А.А.Казько, Ю.П.Маковецкий. Основы автономной навигации космических аппаратов. М.: МО СССР, 1982.
3. Л.Ф.Порфирьев, В.В.Смирнов, В.И.Кузнецов. Аналитические оценки точности автономных методов определения орбит. М.: Машиностроение, 1987.
4. В.И.Кочетков. Системы астрономической ориентации космических аппаратов. - М.: Машиностроение, 1980.
5. Математическое и программное обеспечение системы автономной навигации КА “Янтарь”. М.: МО СССР, 1986.
6. Ю.М.Устинов, B.C.Кан. Среднеорбитальные спутниковые радионавигационные системы “ГЛОНАСС” и “GPS”. М.: Петропавловск-Камчатский, 2002.
7. Е.А.Ткачев, В.Ф.Фатеев. Спутниковые навигационные системы. М.: МО СССР, 1990.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УТОЧНЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕНТРА МАСС КА | 2000 |
|
RU2171969C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА | 2015 |
|
RU2580827C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592715C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2607197C2 |
| СПОСОБ АВТОНОМНОЙ НАВИГАЦИИ И ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ НА ОСНОВЕ ВИРТУАЛЬНЫХ ИЗМЕРЕНИЙ ЗЕНИТНЫХ РАССТОЯНИЙ ЗВЕЗД | 2010 |
|
RU2454631C1 |
| СПОСОБ АВТОНОМНОЙ НАВИГАЦИИ И ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ | 2006 |
|
RU2318188C1 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| Способ астрономической коррекции навигационных параметров летательного аппарата | 2021 |
|
RU2767449C1 |
| Способ определения навигационных параметров орбит космических аппаратов спутниковой навигационной системы ГЛОНАСС с применением результатов наблюдений квазаров в системе: астрономо-геодезическая обсерватория (радиотелескоп) - космический аппарат (радиотелескоп) ГЛОНАСС | 2024 |
|
RU2835569C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА С УПРАВЛЯЕМОЙ ОРИЕНТАЦИЕЙ | 2017 |
|
RU2669481C1 |
Изобретение относится к технике программного позиционирования и ориентации подвижных объектов, в частности к технике угловой ориентации или позиционирования космических аппаратов. Технический результат - повышение точности ориентации подвижных объектов. Для достижения данного результата осуществляют измерение углов положения оптических осей астровизирующих устройств, следящих за звёздами, относительно связанной системы координат. При этом для определения ориентации подвижного объекта используют координаты его центра масс в геоцентрической экваториальной системе координат, которые определяют с помощью высокоточной глобальной спутниковой навигационной системы. 2 ил.
Способ ориентации космического аппарата, заключающийся в вычислении зенитных расстояний двух звезд на основе измерений углов положения оптических осей астровизирующих устройств, следящих за звездами, относительно связанной системы координат, отличающийся тем, что для вычислений используют координаты центра масс космического аппарата в геоцентрической экваториальной системе координат, которые определяют с помощью высокоточной глобальной спутниковой навигационной системы.
| Математическое и программное обеспечение системы автономной навигации КА “Янтарь” | |||
| М | |||
| МО СССР, 1986 | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Разыграев А.П | |||
| Основы управления полетом космических аппаратов | |||
| М | |||
| “Машиностроение”, 1990, с.125 | |||
| US 3883812 A, 13.05.1975 | |||
| DE 19510910 A1, 28.09.1995 | |||
| Устройство для испытания изделий на случайные вибрации | 1978 |
|
SU763714A1 |
| Ботуз С.П | |||
| Позиционные системы программного управления подвижными объектами | |||
| М | |||
| ИПРЖ "Радиотехника", 1998, с.28. | |||

