Предлагаемый способ относится к области космической геодезии и может быть использован при создании космической геодезической сети (КГС) и для определения параметров орбит подвижных космических объектов (КО).
Известны способы создания космической геодезической сети и определения параметров орбит подвижных космических объектов (патенты РФ №№2.040.860, 2.059.423, 2.081.436, 2.107.928, 2.107.929, 2.124.217, 2.153.700, 2.174.092, 2.247.945; патенты США №№3.336.585, 3.803.610, 3.883.812, 3.984.071, 4.688.092, 4.837.699; патент Великобритании №2.180.426; патент ЕР №0.763.714); Скубка Р.А. и др. Спутник у штурвала. - Л.: Судостроение, 1989 г., с.168; Бойков В.В.., Галазин В.Ф., Каплан Б.Л. и др. Опыт создания геоцентрической системы координат П3-90. - Ж:. Геодезия и картография, 1993 г., №11, с.17-21; Половников В.И. и др. Практическое применение звездных каталогов "FK-5" и "Hipparcos" при моделировании подсистем астрономического обеспечения, сообщ. ИПА РАН №97, СПб, 1996 г., 28 с.; Дж.Марш, Б.Дуглас, С.Клоско Координаты станций слежения, определенные по наблюдениям вспышек «Геос-1 и 2» в книге Использование искусственных спутников для геодезии. / Под ред. С.Хенриксена, А.Манчини, Б.Човица. - М.: Мир, 1975 г., и другие.
Из известных способов наиболее близким к предлагаемому является "Способ создания космической геодезической сети" (патент РФ №2.124.217, G 01 S 5/00, 1997), который и выбран в качестве прототипа.
Известный способ обеспечивает повышение точности отнесения начала координат к центру масс Земли и определения взаимного положения пунктов космической геодезической сети за счет компенсации неравномерного распределения пунктов по поверхности Земли и неравномерного распределения измерений на длинных орбитальных дугах, но не позволяет определять параметры орбит подвижных космических объектов, т.е. не полностью реализует свои потенциальные возможности.
Технической задачей изобретения является расширение функциональных возможностей способа путем точного и оперативного определения параметров орбит подвижных космических объектов методом космической триангуляции.
Поставленная задача решается тем, что согласно способу создания космической геодезической сети, включающего дальномерные, доплеровские и фотографические измерения с пунктов космической геодезической сети на геодезический спутник и уравнивание этих измерений динамическим методом космической геодезии с разбиением совокупности всех измерений на группу измерений, равномерно распределенных на длинных орбитальных дугах для отнесения начала координат космической геодезической сети к центру масс Земли, и на группу измерений, отнесенных на короткие орбитальные дуги для уточнения взаимного положения пунктов космической геодезической сети, с включением в короткие дуги в качестве неизвестных элементов взаимного трансформирования решений по длинным и коротким дугам, при этом выполняют дополнительные дальномерные измерения между геодезическим спутником и спутником космической навигационной системы для заполнения разрывов в совокупности измерений на длинных орбитальных дугах и дальномерные измерения с части пунктов космической геодезической сети до спутников космической навигационной системы, используют второй геодезический космический аппарат, разнесенный по орбите от первого геодезического космического аппарата на некоторое линейное расстояние, и методом космической триангуляции определяют координаты подвижного космического объекта, для чего указанными выше дальномерными, доплеровскими и фотографическими измерениями уточняют базис между геодезическими космическими аппаратами, осуществляют привязку подвижного космического объекта к каталожным звездам, координаты которых точно определены в абсолютной системе координат, а углы между базисом и направлениями "геодезический космический аппарат - космический объект" измеряют бортовой оптико-электронной аппаратурой, установленной на борту каждого геодезического космического аппарата, по измеренным значениям базиса и двух углов определяют стороны измерительного треугольника, в вершинах которого в момент измерений находятся два геодезических космических аппарата и космический объект соответственно, и тем самым измеряют дальности между геодезическими космическими аппаратами и космическим объектом, по которым определяют радиус-вектор космического объекта в инерциальной системе координат в момент проведения измерений, дифференцируют по времени координаты космического объекта, полученные в серии измерений с заданным шагом, определяя тем самым вектор скорости космического объекта на заданный момент времени, по измеренным значениям радиус-вектора и вектора скорости космического объекта на заданный момент времени определяют параметры орбиты космического объекта.
Предлагаемый способ практически реализуют следующим образом.
Так как космические навигационные системы ГЛОНАСС (Россия) и НАВСТАР (США) в настоящее время существуют и функционируют, то для реализации предлагаемого способа достаточно установить на геодезических космических аппаратах приемники радиосигналов, излучаемых с навигационных высокоорбитальных космических аппаратов (ВКА), организовать периодический сброс накопленной измерительной информации с борта геодезических среднеорбитальных космических аппаратов (СКА) - (космических аппаратов - измерителей КАИ) на наземные пункты (НП) приема этой информации и разместить на части пунктов КГС дальномеры, используемые в настоящее время для наблюдений ВКА с контрольных измерительных пунктов космической навигационной системы.
Так как высота орбиты Н навигационных спутников равна примерно 20000 км, а геодезических спутников 1000-1500 км, то обеспечивается видимость с каждого геодезического спутника 4-5 навигационных спутников.
Таким образом, навигационные ВКА в данном диапазоне выполняют функции дополнительных подвижных пунктов КГС, компенсирующих неравномерность расположения наземных пунктов и заполняющих разрывы в совокупности измерений, покрывающих орбиту СКА. Дополнительные дальномерные измерения с части пунктов КГС до ВКА способствуют лучшему согласованию координат пунктов КГС и параметров орбит всех спутников при уравнивании динамическим методом космической геодезии.
Измерения между СКА и ВКА будут выполняться с более высокой точностью вследствие отсутствия влияния атмосферы и ослабления влияния ионосферы. Как показали результаты эксперимента по проекту TOPEX/POSEIDON (Nerem R.S., Lerch F.J., Marshall J.A. et al. Gravity model development for TOPEX/POSEIDON: Joint gravity models 1 and 2. Jorn Geophys. Res. v.99, №12, 1994, pp.421-447) и другие исследования, такое двухъярусное построение космического геодезического комплекса позволяет на порядок повысить точность отнесения начала координат к центру масс Земли и определения взаимного положения пунктов КГС.
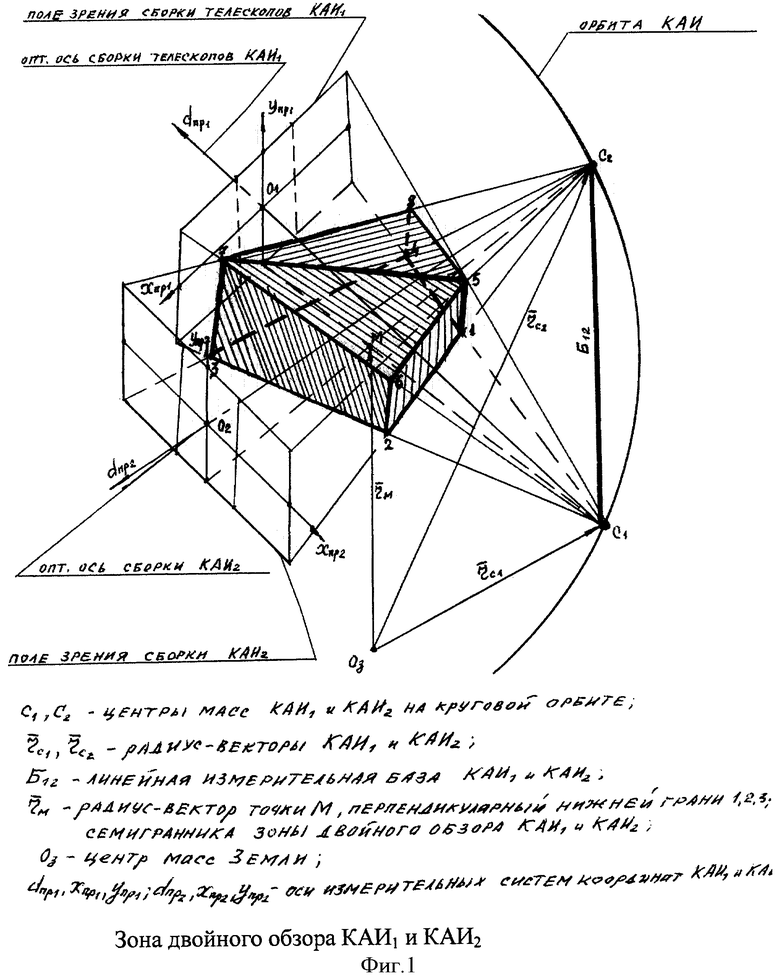
Оптико-электронные приборы (сборки телескопов) устанавливаются на борту каждого СКА таким образом, чтобы их поля зрения образовали зону двойного обзора (фигура 1), в которую при движении СКА по орбите попадают заданные области высот околоземного космического пространства, где по своим орбитам движутся КО, фиксируемые на фотоприемниках (ПЗС-матрицах) СКА в случае их попадания в зону двойного обзора в виде точек на фоне звезд, являющихся неподвижными точечными излучателями света. Затворы оптико-электронных приборов с заданной частотой открываются одновременно на обоих СКА на время экспозиции ΔtЭ<1 секунды, чтобы избежать значительного смаза изображения точечных излучателей на ПЗС-матрицах за счет углового перемещения СКА и КО по своим орбитам. Чувствительность ПЗС-матриц оптико-электронных приборов определяется максимальным значением звездной величины  для звезд, записанных в звездном каталоге, при условии получения изображения звезды с
для звезд, записанных в звездном каталоге, при условии получения изображения звезды с  на ПЗС-матрицах с заданной надежностью за время экспозиции ΔtЭ на фоне шумов прибора и звездного неба. Каждый кадр, считанный с ПЗС-матрицы, представляет собой n пятен от точечных источников света (освещенных Солнцем КО и звезд),которые зафиксированы совместно с шумами ПЗС-матрицы и фоном звездного неба в приборной системе координат ПЗС-матрицы dПР, xПР, yПР.
на ПЗС-матрицах с заданной надежностью за время экспозиции ΔtЭ на фоне шумов прибора и звездного неба. Каждый кадр, считанный с ПЗС-матрицы, представляет собой n пятен от точечных источников света (освещенных Солнцем КО и звезд),которые зафиксированы совместно с шумами ПЗС-матрицы и фоном звездного неба в приборной системе координат ПЗС-матрицы dПР, xПР, yПР.
Первичная обработка измерительной информации заключается в том, чтобы определить на фоне шумов центры световых пятен, получаемых от точечных излучателей света на ПЗС-матрице, т.е. определить координаты (xSI, ySI) каждого S-го источника излучения в момент измерения ti в системе координат ПЗС-матрицы.
Полученные в каждом кадре координаты (xSI, ySI) не представляют никакой ценности, если они не будут привязаны к той системе координат, в которой определяется движение КО, а также в том случае, если исследователь не может отличить звезду от подвижного КО.
Селекция звезд среди всех точечных излучателей света производится в серии последовательных кадров, снятых с ПЗС-матрицы, на основании того признака, что все звезды, в отличие от подвижных КО, будут перемещаться в кадрах серии с одинаковыми угловыми скоростями, равными угловой скорости перемещения ПЗС-матрицы, неподвижно установленной на СКА, который перемещается с одинаковой угловой скоростью по круговой орбите. При этом относительные расстояния между звездами на ПЗС-матрице будут оставаться одинаковыми во всех кадрах серии. Естественно, что за счет поворота ПЗС-матрицы совместно с СКА в серии кадров какие-то новые звезды будут входить в очередной кадр, а какие-то ранее зафиксированные в предыдущих кадрах звезды будут выходить из очередного кадра. Из всех звезд, выделенных в конкретном кадре из серии, необходимо определить каталожные звезды, координаты которых известны с большой точностью во второй экваториальной системе координат. Выделение каталожных звезд в каждом кадре возможно лишь в том случае, если в момент времени ti, соответствующий измерению кадра, известно с достаточной степенью точности направление оптической оси телескопа (сборки телескопов) во второй экваториальной системе координат и относительные угловые расстояния между каталожными звездами, зафиксированными на ПЗС-матрице в этот же момент времени.
Поскольку координаты каталожных звезд (αS - прямое восхождение, δS - склонение звезды) определены во второй экваториальной системе координат, то и направление оптической оси телескопа должно определяться аналогичными углами (α0, δ0) в этой же системе координат. Это обстоятельство требует определения координат подвижных КО по времени (αКО, δКО) также во второй экваториальной системе координат, т.е. получения в момент времени ti координат подвижных КО [αКО(ti), δКО(ti)] относительно расположения каталожных звезд в кадре ПЗС-матрицы в момент проведения измерения ti.
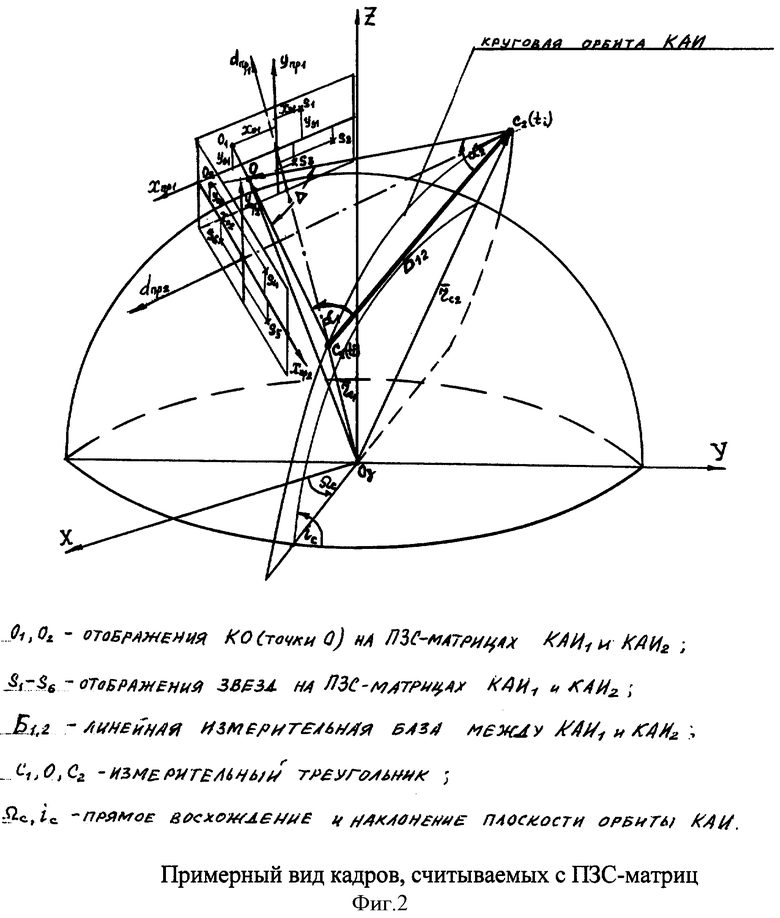
За период обращения СКА по круговой орбите оси приборной системы координат dПР, xПР, yПР, жестко связанные с ПЗС-матрицей и корпусом СКА, совершают полный оборот в абсолютном пространстве. В связи с этим при проведении привязки подвижных КО к каталожным звездам необходимо определить в момент ti угол разворота ϕP вертикальной плоскости ПЗС-матрицы (dПР, yПР) относительно плоскости круга склонения оптической оси телескопа dПР (фигура 2).
Следовательно, для текущей привязки подвижных КО определения координат [(αКО(ti), δКО(ti)] к каталожным звездам с координатами (αSj, δSj) необходимо:
1. Определить координаты центров пятен всех точечных источников излучения [xS(ti), yS(ti)] в приборной системе координат dПР; хПР, уПР.
2. В серии последовательных кадров произвести селекцию звезд среди всех точечных излучателей света, зафиксированных на ПЗС-матрице.
3. Определить с достаточной точностью направление оптической оси телескопа (сборки телескопов) в момент проведения измерения ti во второй экваториальной системе координат [αО(ti), δО(ti)].
4. Определить угол разворота ϕP вертикальной плоскости приборной системы координат относительно плоскости круга склонения оптической оси телескопа в момент ti.
5. Определить каталожные звезды и их координаты αS(ti), δS(ti) среди всех звезд, попавших в кадр ПЗС-матрицы в момент ti.
6. Привязать координаты подвижных источников излучения к каталожным звездам, т.е. получить координаты КО αКО(ti), δКО(ti), попавших в кадр ПЗС-матрицы в момент ti.
На этом заканчивается обработка конкретных кадров ПЗС-матрицы, выходом которой являются координаты αКО(ti), δКО(ti) подвижных источников излучений во второй экваториальной системе координат. Остальная информация, зафиксированная в кадрах ПЗС-матрицы в момент ti (координаты всех звезд), не имеет значения для проведения дальнейшей обработки измерительной информации, поэтому она может быть уничтожена.
Все перечисленные задачи должны решаться на борту СКА, причем определение центров световых пятен точечных источников излучения производится с помощью встроенных в оптико-электронные приборы микропроцессоров, а определение координат подвижных КО, попавших в кадры ПЗС-матрицы, необходимо проводить на мощном бортовом компьютере, хранящем в своей памяти сведения о технологических данных бортового оборудования СКА, звездном каталоге, текущих координатах СКА в абсолютной геоцентрической экваториальной системе координат и др.
CKA1(КАИ1) и СКА2(КАИ2), создающие зону двойного обзора (фигура 1), должны иметь между собой постоянно действующий канал связи для передачи на ведущий СКА1 пар координат КО αКО(ti), δКО(ti), полученных на ведомом СКА2 в момент ti.
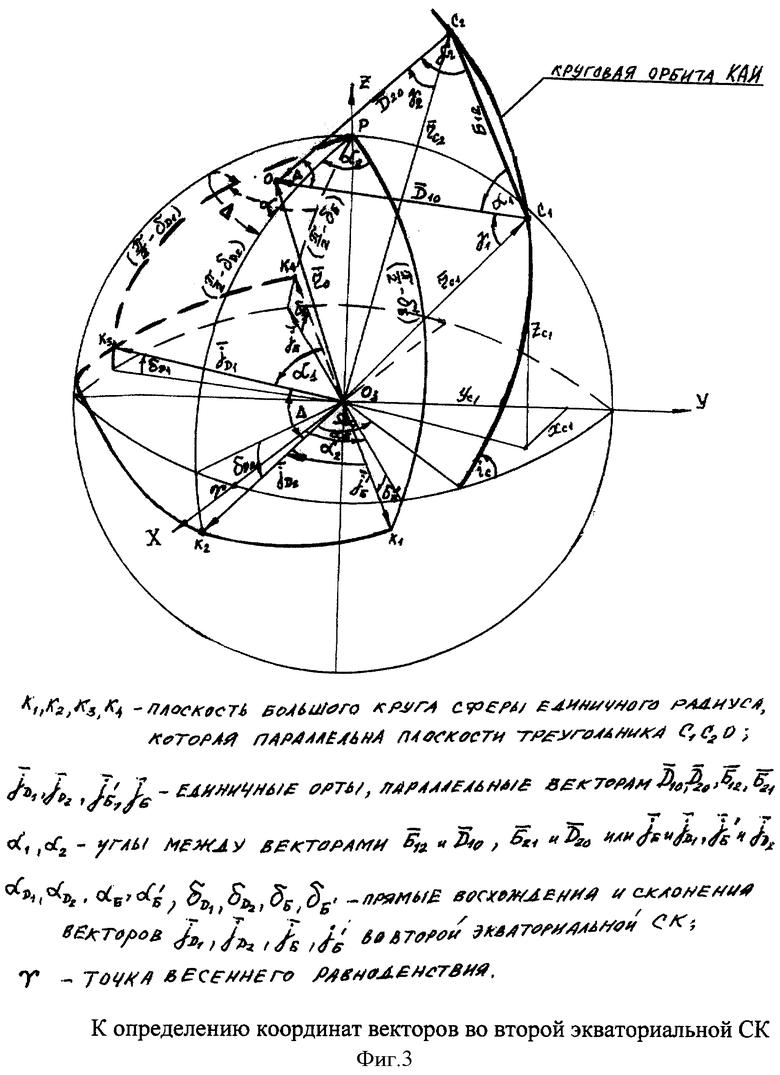
Поскольку координаты подвижного КО αКО(ti), δКО(ti) измеряются бортовой аппаратурой CKA1 и СКА2 на фоне различных участков звездного неба (относительно каталожных звезд), то на ведущем CKA1 должна решаться задача о том, что КО, зафиксированный в один и тот же момент времени ti на ПЗС-матрицах CKA1 и СКА2, принадлежит зоне двойного обзора и позволяет построить измерительный треугольник C1OC2 (фигура 3), в котором сумма углов
α1+α2+Δ=π,
где α1 - угол между линейной измерительной базой  и вектором дальности
и вектором дальности  между КАИ1 и космическим объектом;
между КАИ1 и космическим объектом;
α2 - угол между базой  и вектором дальности
и вектором дальности  между КАИ2 и космическим объектом;
между КАИ2 и космическим объектом;
Δ - угол между векторами  и
и  при вершине измерительного треугольника, где находится измеряемый космический объект.
при вершине измерительного треугольника, где находится измеряемый космический объект.
Таким образом, предлагаемый способ по сравнению с прототипом позволяет не только повысить точность отнесения начала координат к центру масс Земли и определения взаимного положения пунктов космической геодезической сети за счет компенсации неравномерного распределения пунктов по поверхности Земли и неравномерного распределения измерений на длинных орбитальных дугах, но и обеспечивает точное и оперативное определение параметров орбит подвижных космических объектов методом космической триангуляции на коротких мерных интервалах (порядка 10-20 секунд), чего не позволяет сделать метод проведения угломерных измерений подвижных космических объектов с одного геодезического космического аппарата, тем самым функциональные возможности известного способа расширены.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ КОСМИЧЕСКОГО ОБЪЕКТА | 2006 |
|
RU2319172C1 |
| СПОСОБ СОЗДАНИЯ КОСМИЧЕСКОЙ ГЕОДЕЗИЧЕСКОЙ СЕТИ | 1997 |
|
RU2124217C1 |
| Способ спутникового геодезического нивелирования определения параметров глобальной модели внешнего гравитационного поля Земли (ВГПЗ) | 2021 |
|
RU2783645C1 |
| СПОСОБ ТРИАНГУЛЯЦИИ ЦЕЛЕЙ | 2010 |
|
RU2423720C1 |
| Способ спутниковой гравитационной градиентометрии | 2020 |
|
RU2745364C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА С УПРАВЛЯЕМОЙ ОРИЕНТАЦИЕЙ | 2017 |
|
RU2669481C1 |
| СПОСОБ И СИСТЕМА КОСМИЧЕСКОЙ НАВИГАЦИИ | 2014 |
|
RU2568937C2 |
| СПОСОБ ОБЗОРА НЕБЕСНОЙ СФЕРЫ С КОСМИЧЕСКОГО АППАРАТА ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И КОСМИЧЕСКАЯ СИСТЕМА ОБЗОРА НЕБЕСНОЙ СФЕРЫ ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И ОБНАРУЖЕНИЯ ТЕЛ СОЛНЕЧНОЙ СИСТЕМЫ, РЕАЛИЗУЮЩАЯ УКАЗАННЫЙ СПОСОБ | 2012 |
|
RU2517800C1 |
| СПОСОБ КООРДИНАТНО-ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ПОДВОДНЫХ МОБИЛЬНЫХ ОБЪЕКТОВ | 2007 |
|
RU2390098C2 |
| Способ определения навигационных параметров орбит космических аппаратов спутниковой навигационной системы ГЛОНАСС с применением результатов наблюдений квазаров в системе: астрономо-геодезическая обсерватория (радиотелескоп) - космический аппарат (радиотелескоп) ГЛОНАСС | 2024 |
|
RU2835569C1 |
Предлагаемый способ относится к области космической геодезии и может быть использован при создании космической геодезической сети (КГС) и для определения параметров орбит подвижных космических объектов (КО). Технической задачей изобретения является расширение функциональных возможностей способа путем точного и оперативного определения параметров подвижных объектов методом космической триангуляции. Система, реализующая предлагаемый способ, содержит два сотрудничающих между собой геодезических среднеорбитальных космических аппаратов (СКА), наземные наблюдательные пункты (НП) космической геодезической сети, высокоорбитальные космические аппараты (ВКА) глобальных навигационных систем ГЛОНАСС (Россия) и НАВСТАР (США), подвижные космические объекты (КО) и оптико-электронные приборы (сборки телескопов),устанавливаемые на борту каждого СКА и используемые в качестве фотоприемников ПЗС-матрицы. 3 ил.
Способ создания космической геодезической сети, включающий дальномерные, доплеровские и фотографические измерения с пунктов космической геодезической сети на геодезический спутник и уравнивание этих измерений динамическим методом космической геодезии с разбиением совокупности всех измерений на группу измерений, равномерно распределенных на длинных орбитальных дугах для отнесения начала координат космической геодезической сети к центру масс Земли, и на группу измерений, отнесенных на короткие орбитальные дуги для уточнения взаимного положения пунктов космической геодезической сети, с включением в короткие дуги в качестве неизвестных элементов взаимного трансформирования решений по длинным и коротким дугам, при этом выполняют дополнительные дальномерные измерения между геодезическим спутником и спутниками космической навигационной системы для заполнения разрывов в совокупности измерений на длинных орбитальных дугах и дальномерные измерения с части пунктов космической геодезической сети до спутников космической навигационной системы, отличающийся тем, что используют второй геодезический космический аппарат, разнесенный по орбите от первого геодезического космического аппарата на некоторое линейное расстояние, и методом космической триангуляции определяют координаты подвижного космического объекта, для чего указанными выше дальномерными, доплеровскими и фотографическими измерениями уточняют базис между геодезическими космическими аппаратами, осуществляют привязку подвижного космического объекта к каталожным звездам, координаты которых точно определены в абсолютной системе координат, а углы между базисом и направлениями "геодезический космический аппарат - космический объект" измеряют бортовой оптико-электронной аппаратурой, установленной на борту каждого геодезического космического аппарата, по измеренным значениям базиса и двух углов определяют стороны измерительного треугольника, в вершинах которого в момент измерений находятся два геодезических космических аппарата и космический объект соответственно, и тем самым измеряют дальности между геодезическими космическими аппаратами и космическим объектом, по которым определяют радиус-вектор космического объекта в инерциальной системе координат в момент проведения измерений, дифференцируют по времени координаты космического объекта, полученные в серии измерений с заданным шагом, определяя тем самым вектор скорости космического объекта на заданный момент времени, по измеренным значениям радиус-вектора и вектора скорости космического объекта на заданный момент времени определяют параметры орбиты космического объекта.
| СПОСОБ СОЗДАНИЯ КОСМИЧЕСКОЙ ГЕОДЕЗИЧЕСКОЙ СЕТИ | 1997 |
|
RU2124217C1 |
| Бойков В.В., Галазин В.Ф., Каплан Б.Л | |||
| и др | |||
| Пожарный двухцилиндровый насос | 0 |
|
SU90A1 |
| - Геодезия и картография, 1993, №11, с.17-21 | |||
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 1999 |
|
RU2174092C2 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 2003 |
|
RU2247945C1 |
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТА НА ФОНЕ ЗВЕЗД | 1986 |
|
RU2107928C1 |
| US 4837699 A, 06.06.1989 | |||
| US 3803610 A, 09.04.1974 | |||
| US 4688092 A, 18.08.1987 | |||
| US 3984071 A, 05.10.1976 | |||
| МНОГОСЛОЙНАЯ БРОНЕПРЕГРАДА | 2001 |
|
RU2180426C1 |

