ОБЛАСТЬ ТЕХНИКИ
Заявленное изобретение относится к автоматизированным системам швейного производства, а именно к швейному робототехническому комплексу.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Из уровня техники известна, в частности, полностью автоматическая четырехсторонняя швейная машина (см. CN211036335U, опубл. 17.07.2020). Полезная модель относится к области техники обработки тканей и, в частности, раскрывает полностью автоматическую четырехстороннюю швейную машину, которая содержит станину машины, верстак, модуль для шитья ткани, модуль роликовой подачи и модуль укладки материала, расположенные на одном сторону рамы машины. При этом стойка крепится к инфраструктуре; верстак установлен на стойке. Модуль сшивания ткани содержит механизм вертикального сшивания ткани, механизм поперечного сшивания ткани, вертикальную швейную рамку и поперечную швейную рамку; Два набора модулей роликовой подачи расположены соответственно с двух сторон вертикального швейного механизма ткани и используются для проталкивания ткани и укладки, укладки и хранения сшитой ткани через модуль укладки, а модуль укладки содержит основание, подъемный механизм. рама, подъемное приводное устройство, устройство зажима ткани и устройство транспортировки ткани.
Устройство, предложенное в (1) имеет ряд недостатков, такие как, работа только с несложными элементами для сшивания, в основном с плоскими краями.
Наиболее близким аналогом заявленного устройства, по мнению заявителя, является вспомогательное швейное оборудование промышленного робота (см. CN218372735U, опубл. 24.01.2023) (2). В полезной модели раскрыто вспомогательное швейное оборудование промышленного робота, которое включает верстак, на котором расположены промышленный робот и оверлок, а на промышленном роботе установлен зажимной механизм, используемый для размещения деталей одежды, подлежащих обработке, в оверлоке. через промышленного робота для швейной обработки. Зажимной механизм содержит монтажную раму и пластину прижима ткани, монтажная рама закреплена на промышленном роботе, пластина прижима ткани расположена под монтажной рамой, в пластине прижима ткани образовано множество всасывающих отверстий, монтажная рама снабжен множеством узлов всасывания ткани, соответствующих всасывающим отверстиям, и узлы всасывания ткани расположены на монтажной раме. Пластина для прижима ткани используется для адсорбции детали одежды в нижней части пластины для прижима ткани на пластине для прижима ткани.
Предложенный аналог (2) наиболее близко подходит к решению проблем, решаемых заявленным изобретением, однако, по мнению заявителя проблема решается не самым эффективным способом, поскольку устройство не является полностью автономным и требует присутствие оператора.
КРАТКОЕ ИЗЛОЖЕНИЕ ИЗОБРЕТЕНИЯ
Данное изобретение направлено на решение технической проблемы, связанной созданием автономного робототехнического комплекса «Робот-швея».
Техническим результатом изобретения является создание автономного робототехнического комплекса «Робот-швея».
Технический результат достигается посредством создания робототехнического комплекса "Робот-швея", содержащего стол, на котором размещены механизм забора из стопки, коллаборативный робот, оверлок.
Заявленный робототехнический комплекс «Робот-швея» характеризуется тем, что снабжен системой технического зрения, размещенной на стойке, которая крепится к столу, светильником подсветки для освещения нижней поверхности детали, сменным прижимом, присоединяемым к коллаборативному роботу и системой управления.
В предпочтительном варианте выполнения управление роботом осуществляется через приложение на планшетах с Andriod/ iOS, и на ПК с Windows или вручную.
В предпочтительном варианте выполнения система управления снабжена сетевой картой.
В предпочтительном варианте выполнения светильник подсветки стоит из корпуса, внутри которого проложены управляемые светодиодные ленты.
В предпочтительном варианте выполнения предусмотрена регулировка яркости света.
В предпочтительном варианте выполнения светильник устанавливается в верхней части стола и мажет выдвигаться для обслуживания.
В предпочтительном варианте выполнения робототехнический комплекс снабжен блоком подготовки воздуха.
В предпочтительном варианте выполнения крепление прижима к фланцу, установленному на оси робота осуществляется через быстросъёмное соединение.
КРАТКОЕ ОПИСАНИЕ РИСУНКОВ
Сущность изобретения поясняется чертежами, на которых:
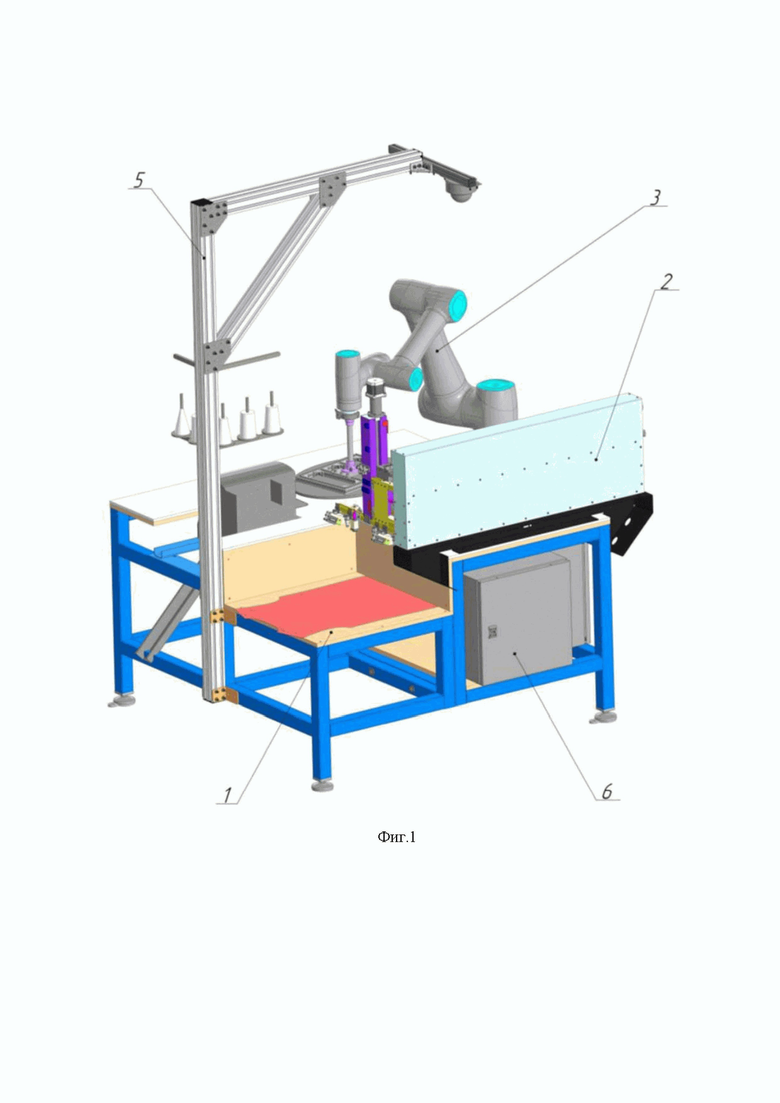
Фиг.1 – вид сзади робототехнического комплекса "Робот-швея";
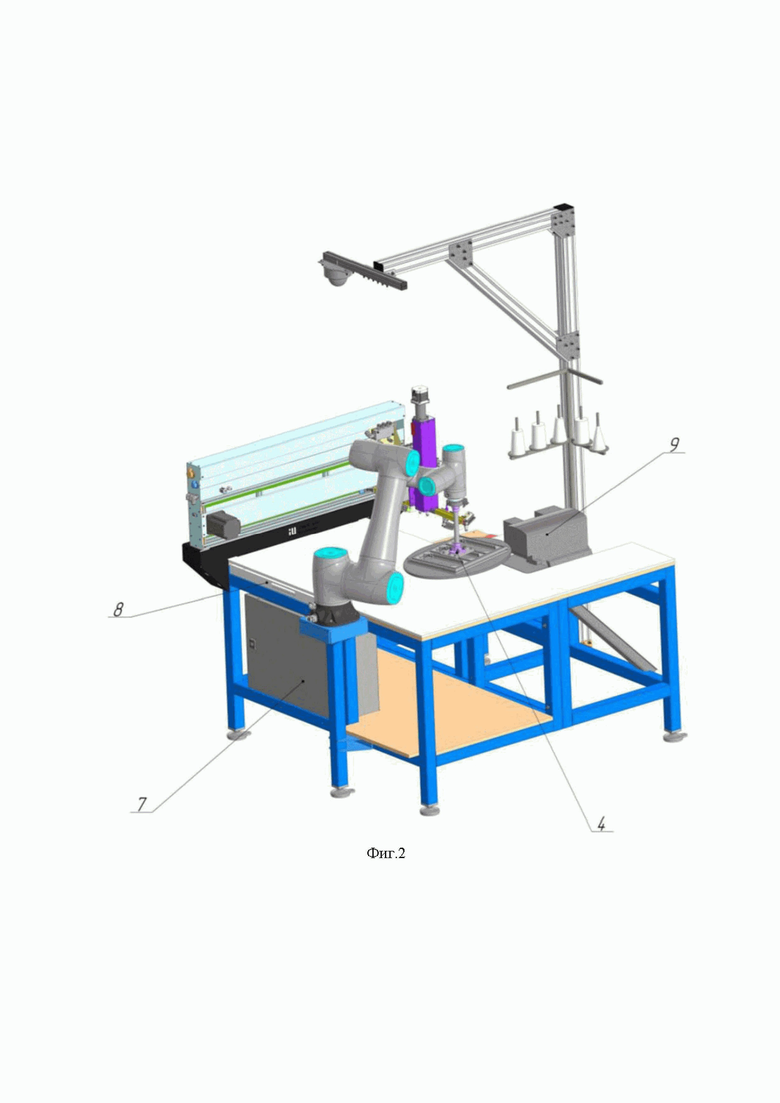
Фиг.2 – вид спереди робототехнического комплекса "Робот-швея";
Позиции на фиг.1, 2 обозначают следующее:
1- Стол;
2- Механизм забора из стопки;
3- Коллаборативный робот DODOT CR16;
4- Комплект сменных прижимов;
5- Стойка с системой технического зрения;
6- Шкаф силового энергоснабжения;
7- Шкаф управления;
8- Светильник подсветки контура;
9- Оверлок Jack C6-4-M03/333;
Кнопочный пост управления (на рисунке не показано);
Информационный дисплей (на рисунке не показано);
Кнопка аварийного останова (на рисунке не показано);
Воздушный компрессор (на рисунке не показано).
Эти чертежи не охватывают и, кроме того, не ограничивают весь объем вариантов реализации данного технического решения, а представляют собой только иллюстративный материал частного случая его реализации.
ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Заявленный робототехнический комплекс «Робот-швея» (далее - РТК) предназначен для автоматизации обработки (обмётывания) срезов текстильных материалов при изготовлении швейных изделий.
РТК содержит стол (1), на котором размещены механизм забора из стопки (2), коллаборативный робот (3), оверлок (9). РТК снабжен системой технического зрения, размещенной на стойке (5), которая крепится к столу (1), светильником подсветки (8) для освещения нижней поверхности детали, сменным прижимом (4), присоединяемым к коллаборативному роботу и системой управления, шкафом силового энергоснабжения (6) и шкафом управления (7).
РТК производит забор детали из стопки, определение контура системой технического зрения (СТЗ), подачу детали роботом к рабочему органу оверлока, обработку края и перемещение изделия на следующие операции. Цикл обметывания состоит и следующей последовательности операций:
1) Оператор укладывает стопку деталей приемную зону;
2) Оператор с помощью кнопочного поста запускает РТК в атоматическом режиме. Деталь с помощью механизма забора из стопки перемещается в зону сканирования СТЗ;
3) В зоне сканирования детали. Производится сканирование и распознавание контура системой технического зрения (СТЗ);
4) Робот осуществляет прижим детали с учетом ее ориентации;
5) Далее робот производит перемещение детали в рабочую зону оверлока;
6) Оверлок обметывает деталь по необходимому контуру, срезая излишки ткани;
7) Готовая деталь перемещается роботом с помощью прижима на следующий стол на дальнейшие операции.
Данный алгоритм описан для работы РТК в автоматическом режиме.
Основным манипулятором РТК является коллаборативный робот DOВOT CR16 (3) Робот создан специально для работы с человеком и позволяет увеличить эффективность производства в любых сценариях взаимодействия. Функция обнаружения препятствия SafeSkin обеспечивает безопасность при работе с роботом. Система датчиков с дальностью действия 15 см, мгновенный отклик и защита от помех снижают вероятность столкновения при работе с человеком на 90%.
Управление роботом осуществляется через приложение на планшетах. Управление возможно так же вручную, ведя робота по определённым точкам, которые он в последствии будет повторять. Производительная сетевая карта со скоростью передачи данных сокращает время задержки.
Оверлок Jack C6-4-M03/333 (9) - двухигольная стачивающе-обметочная машина цепного стежка (4-х ниточный оверлок) с электронным управлением и автоматическими функциями. Машина применяется для стачивания с одновременным обметыванием при пошиве широкого ассортимента изделий из легких, средних по толщине и умеренно тяжелых материалов. Автоматические функции: обрезка ниток, подъем лапки, индикатор начала строчки, остановка при выходе материала из зоны шитья. Имеется голосовое сопровождение. Энергосберегающий серводвигатель с прямым приводом обеспечивает низкий уровень шума и вибрации. Реализовано автоматическое распознавание толщины материалов, автоматическое снижение скорости с увеличением толщины, адаптация при прохождении утолщенных участков.
Шкаф управления (7) служит управляющим и связующим центром всех структурных составляющих РТК. Шкаф силового энергоснабжения (6) служит для подключения и распределения силовых цепей.
Шкафы устанавливаются внутри каркаса стола и обеспечиваю управление и энергопитание составных элементов РТК. Назначение кнопок, порядок работы и управления приведено в инструкции оператора.
Механизм забора (2), предназначен для перемещения деталей от места раскладки к зоне сканирования и включает в себя два приводных узла. Узел подъема служит для забора детали из стопки и ее вертикального перемещения. Схват детали осуществляется вакуумными присосками, а удержание - игольчатыми захватами. Наличие детали контролируется датчиком. Приводом служит шаговый электродвигатель, а линейное движение преобразуется шарико-винтовой парой. Узел передвижения обеспечивает горизонтальное перемещение деталей, для чего внутри корпуса расположены линейные направляющие и ременная передача. Привод обеспечивает шаговый электродвигатель.
Стол (1) предназначен для крепления и расположения основных элементов РТК. Стол состоит из каркаса с расположенными на кронштейнах крепления оверлока. Опорой стола служат регулируемые ножки. Столешница служит основной рабочей поверхностью, по которой перемещаются детали. Столешница изготовлена из специального пластика для обеспечения скольжения деталей. В зоне сканирования столешница имеет прозрачную вставку для прохождения световых лучей от светильника подсветки контура. Столешница зоны забора.
Система технического зрения обеспечивает обнаружение, автоматический контроль и анализ расположения объектов (деталей) в зоне сканирования.
Система выполнена на комбинированной основе и представляет из себя Г-образную стойку (5), состоящую из вертикальной и консольной балок, соединенных подкосом, в верхней части установлена поперечина с держателем RGB-камеры. Кронштейны крепления камеры предусматривают возможность регулировки положения и направления.
Светильник подсветки контура (8) служит для освещения нижней поверхности детали и обеспечения контраста контура для работы системы технического зрения. Светильник стоит из корпуса, внутри которого проложены управляемые светодиодные ленты. Предусмотрена регулировка яркости света. Светильник устанавливается в верхней части стола и мажет выдвигаться для обслуживания.
Прижимы (4) являются основными исполнительными механизмами робот. Прижим обеспечивает удержание и перемещение детали.
Применяются три вида прижимов, специализированных под условия работы, но унифицированных по комплектующим.
Основной прижим состоит из каркаса и прижимной панели. Контур прижимной панели условно подобен контуру детали. Крепление прижима к фланцу, установленному на оси J6 робота осуществляется через быстросъёмное соединение.
Блок подготовки воздуха предназначен для очистки воздуха, поступающего из магистрали в пневмосистему от механических частиц, паров воды и масла. Блок размещается на проставке в нижней части стола.
Блок состоит из следующих компонентов: фильтра, регулятора давления с манометром, выходного фитинга, кронштейнов-соединителей и соединителей.
ПРОМЫШЛЕННОЕ ПРИМЕНЕНИЕ
Предложенный робототехнический комплекс "Робот-швея" предназначен для применения в швейном производстве.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система технического зрения робототехнического комплекса "Робот-швея" | 2024 |
|
RU2832590C1 |
| Механизм забора из стопки робототехнического комплекса "Робот-швея" | 2024 |
|
RU2832763C1 |
| СПОСОБ ОБРАБОТКИ ЛИСТОВОГО МАТЕРИАЛА, В ЧАСТНОСТИ БАНКНОТ, И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОБРАБОТКИ ЛИСТОВОГО МАТЕРИАЛА, В ЧАСТНОСТИ, БАНКНОТ | 2020 |
|
RU2737603C1 |
| Робототехнический комплекс | 1987 |
|
SU1468717A1 |
| КОЛЛАБОРАТИВНОЕ СВАРОЧНОЕ УСТРОЙСТВО | 2024 |
|
RU2833865C1 |
| Многофункциональный робототехнический комплекс для мониторинга технического состояния, окружающего пространства и проведения технического обслуживания крупногабаритного объекта в сооружении | 2021 |
|
RU2776474C1 |
| Способ роботизированной сборки | 1988 |
|
SU1648718A1 |
| ТРАНСФОРМИРУЕМЫЙ СТОЛ-ТУМБА ДЛЯ ШВЕЙНОЙ МАШИНЫ | 2006 |
|
RU2337191C2 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ СВАРКИ ЛИСТОШТАМПОВОЧНЫХ ЭЛЕМЕНТОВ КУЗОВА АВТОМОБИЛЯ | 1999 |
|
RU2164201C2 |
| СПОСОБ ПАРАЛЛЕЛЬНОЙ РАСПРЕДЕЛЁННОЙ РАБОТЫ ГРУППЫ РОБОТОТЕХНИЧЕСКИХ КОМПЛЕКСОВ ПРИ РЕШЕНИИ ЗАДАЧИ РАСПОЗНАВАНИЯ МНОЖЕСТВА ОБЪЕКТОВ НА ЦИФРОВЫХ ИЗОБРАЖЕНИЯХ | 2024 |
|
RU2828320C1 |
Изобретение относится к автоматизированным системам швейного производства, а именно к швейному робототехническому комплексу "Робот-швея", содержащему стол, на котором размещены механизм забора из стопки, коллаборативный робот, оверлок, при этом комплекс снабжен системой технического зрения, размещенной на стойке, которая крепится к столу, светильником подсветки для освещения нижней поверхности детали, состоящим из корпуса, внутри которого проложены управляемые светодиодные ленты, установленным в верхней части стола с возможностью выдвижения для обслуживания, сменным прижимом, присоединяемым к коллаборативному роботу, и системой управления. 4 з.п. ф-лы, 2 ил.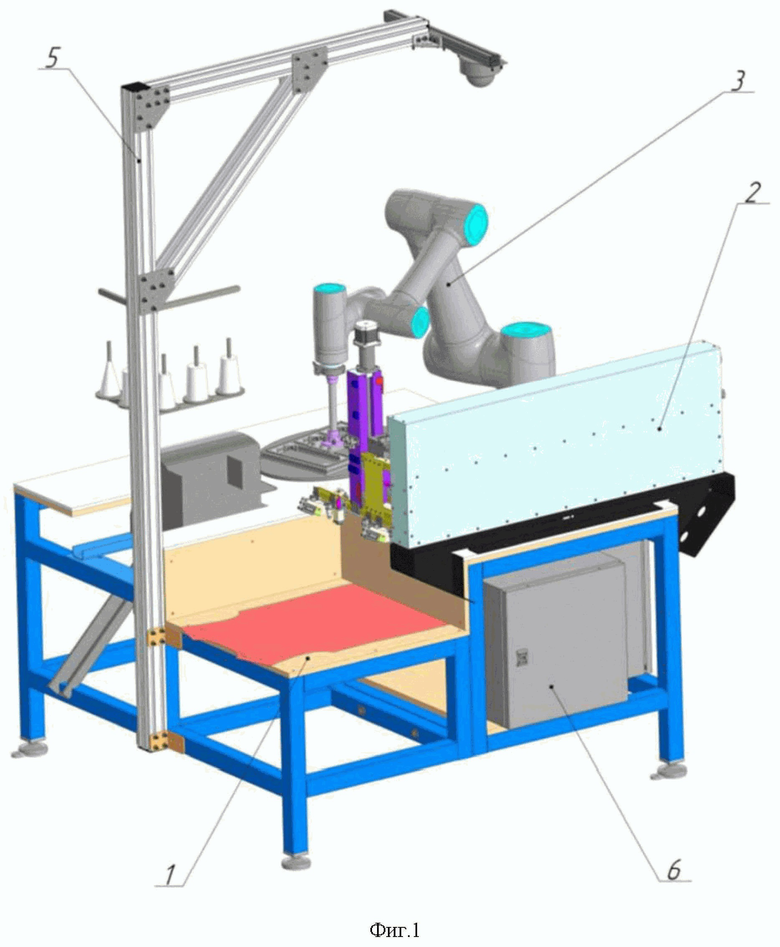
1. Робототехнический комплекс "Робот-швея", содержащий стол, на котором размещены механизм забора из стопки, коллаборативный робот, оверлок, отличающийся тем, что снабжен системой технического зрения, размещенной на стойке, которая крепится к столу, светильником подсветки для освещения нижней поверхности детали, состоящим из корпуса, внутри которого проложены управляемые светодиодные ленты, установленным в верхней части стола с возможностью выдвижения для обслуживания, сменным прижимом, присоединяемым к коллаборативному роботу, и системой управления.
2. Робототехнический комплекс по п.1, отличающийся тем, что система управления снабжена сетевой картой.
3. Робототехнический комплекс по п.1, отличающийся тем, что предусмотрена регулировка яркости света.
4. Робототехнический комплекс по п.1, отличающийся тем, что снабжен блоком подготовки воздуха.
5. Робототехнический комплекс по п.1, отличающийся тем, что крепление прижима к фланцу, установленному на оси робота, осуществляется через быстросъемное соединение.
| CN 217517139 U, 30.09.2022 | |||
| US 5790687 A, 04.08.1998 | |||
| CN 105926183 A, 07.09.2016 | |||
| CN 217801700 U, 15.11,2022 | |||
| US 11421363 B2, 23.08.2022 | |||
| CN 208055723 U, 11.06.2018 | |||
| ШВЕЙНЫЙ РОБОТИЗИРОВАННЫЙ ТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС | 1999 |
|
RU2154701C1 |
| KR 102582443 B1, 25.09.2023 | |||
| WO 2018044176 A1, 08.03.2018 | |||
| CN 211079565 U, 24.07.2020 | |||
| CN 218372735 U, 24.01.2024 | |||
| KR 102567743 B1, 17.08.2023. | |||

