ОБЛАСТЬ ТЕХНИКИ
[0001] Формы осуществления настоящего изобретения относятся к области техники управления транспортным средством и, в частности, к способу и устройству для управления движением транспортного средства.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[0002] По мере развития социальной экономики парк транспортных средств увеличивается из года в год, но из-за относительного отставания в строительстве дорожной инфраструктуры и улучшении стиля вождения людей увеличивается количество дорожно-транспортных происшествий.
[0003] В настоящее время в уровне техники для уменьшения количества дорожно-транспортных происшествий информация о разделительной линии дорожной разметки обычно распознается путем получения камерой изображения перед транспортным средством. В соответствии с информацией о разделительной линии определяют, отклоняется ли транспортное средство от текущей полосы движения. Когда определяют, что транспортное средство отклоняется от текущей полосы движения, соответствующая система управления на транспортном средстве поворачивает рулевое колесо, чтобы изменить направление движения, тем самым отодвигая транспортное средство обратно в текущую полосу движения и избегая столкновения транспортного средства с транспортным средством на соседней полосе.
[0004] Однако, автор настоящего изобретения обнаружил, что в традиционной технологии существуют по меньшей мере следующие проблемы. Когда транспортное средство на соседней полосе движения от собственного транспортного средства отклоняется от соседней полосы движения и движется в направлении области впереди собственного транспортного средства, собственное транспортное средство не будет автоматически поворачивать рулевое колесо, чтобы изменить направление движения транспортного средства, так как оно не отклоняется от текущей полосы движения. Если водитель в это время не изменит направление движения транспортного средства вовремя из-за паники, то очень вероятно столкновение. Следовательно, по-прежнему невозможно эффективно избежать возникновения дорожно-транспортных происшествий, определяя, поворачивать ли рулевое колесо транспортного средства, просто на основании определения, отклоняется ли транспортное средство от текущей полосы движения, и вероятность дорожно-транспортных происшествий остается высокой.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] В формах осуществления настоящего изобретения предлагаются способ и устройство для управления движением транспортного средства, позволяющие решить проблему уровня техники, заключающуюся в том, что частота дорожно-транспортных происшествий остается высокой.
[0006] В первом аспекте в форме осуществления настоящего изобретения предлагается способ управления движением транспортного средства. Способ включает:
получение параметров движения транспортного средства, информации о характеристиках объекта в передней боковой области транспортного средства и относительной информации между объектом и транспортным средством, при этом относительная информация содержит относительное поперечное расстояние между объектом и транспортным средством;
определение, следует ли формировать команду коррекции параметров в соответствии с параметрами движения, информацией о характеристиках объекта и относительной информацией при различных условиях движения, при этом команда коррекции параметров включает в себя команду коррекции расстояния и/или команду коррекции скорости, при этом условия движения включают первое условие, когда между транспортным средством и соседней полосой движения нет разделительной полосы, второе условие, когда объект на соседней полосе движения входит в область прямо перед транспортным средством, и/или третье условие, когда транспортному средству необходимо обогнать объект на соседней полосе движения; и
коррекцию относительного поперечного расстояния между транспортным средством и объектом согласно команде коррекции расстояния и/или коррекцию скорости движения транспортного средства согласно команде коррекции скорости в ответ на формирование команды коррекции параметров.
[0007] Во втором аспекте в форме осуществления настоящего изобретения предлагается устройство управления движением транспортного средства, содержащее:
модуль сбора информации, сконфигурированный для получения параметров движения транспортного средства, информации о характеристиках объекта в передней боковой области транспортного средства и относительной информации между объектом и транспортным средством, при этом относительная информация включает в себя относительное поперечное расстояние между объектом и транспортным средством;
модуль обработки информации, сконфигурированный для определения, следует ли формировать команду коррекции параметров в соответствии с параметрами движения, информацией о характеристиках объекта и относительной информацией при различных условиях движения, при этом команда коррекции параметров включает в себя команду коррекции расстояния и/или команду коррекции скорости, при этом условия движения включают первое условие, когда нет разделительной полосы между транспортным средством и соседней полосой движения, второе условие, когда объект на соседней полосе движения входит в область прямо перед транспортным средством, и/или третье условие, когда транспортному средству необходимо обогнать объект на соседней полосе движения; и
модуль управления движением, сконфигурированный для коррекции относительного поперечного расстояния между транспортным средством и объектом согласно команде коррекции расстояния и/или коррекции скорости движения транспортного средства согласно команде коррекции скорости, в ответ на формирование команды коррекции параметров.
[0008] В третьем аспекте в форме осуществления настоящего изобретения предлагается устройство управления движением транспортного средства, содержащее:
датчик, сконфигурированный для сбора параметров движения транспортного средства;
камеру, сконфигурированную для сбора информации о характеристиках объекта в передней боковой области транспортного средства;
радиолокационная система, сконфигурированная для сбора относительной информации между объектом и транспортным средством; и
контроллер, содержащий память и процессор, при этом память хранит компьютерную программу, и программа, когда выполняется процессором, реализует способ управления движением транспортного средства, как описано в приведенном выше первом аспекте и различных возможных исполнениях первого аспекта.
[0009] В четвертом аспекте в форме осуществления настоящего изобретения предлагается машиночитаемый носитель данных. Машиночитаемый носитель данных хранит исполняемые компьютером команды. Процессор при выполнении исполняемых компьютером команд реализует способ управления движением транспортного средства, как описано в приведенном выше первом аспекте и различных возможных исполнениях первого аспекта.
[0010] В способе и устройстве управления движением транспортного средства согласно формам осуществления настоящего изобретения определяют состояние движения транспортного средства и ситуации объекта в передней боковой области транспортного средства на основе параметров движения транспортного средства, информации о характеристиках объекта в передней боковой области транспортного средства и относительной информации между объектом и транспортным средством; и определяют, повлияет ли объект в передней боковой области на транспортное средство, то есть определяют, существует ли риск столкновения. Если транспортное средство подвергается риску столкновения с объектом, формируют соответствующую команду коррекции параметров, чтобы скорректировать относительное поперечное расстояние между транспортным средством и объектом и скорректировать скорость движения транспортного средства, удержать транспортное средство вдали от объектов, которые могут столкнуться с транспортным средством, так, чтобы эффективно избежать столкновения транспортного средства с объектами в передней боковой области, уменьшить возникновение дорожно-транспортных происшествий и снизить частоту возникновения несчастных случаев на транспорте.
Краткое описание чертежей
[0011] Чтобы более наглядно описать технические решения в формах осуществления настоящего изобретения или в уровне техники, ниже кратко описаны чертежи, которые будут использоваться в описании форм осуществления изобретения или уровня техники. Очевидно, что чертежи, описанные ниже, просто показывают некоторые формы осуществления настоящего изобретения, и специалисты средней квалификации в данной области техники могут получить другие чертежи в соответствии с предоставленными чертежами без каких-либо творческих усилий.
[0012] Фиг. 1 представляет собой первую блок-схему последовательности операций способа управления движением транспортного средства согласно форме осуществления настоящего изобретения.
[0013] Фиг. 2 представляет собой схематическое изображение транспортного средства, движущегося по полосе движения в соответствии с формой осуществления настоящего изобретения.
[0014] Фиг. 3 представляет собой вторую блок-схему последовательности операций способа управления движением транспортного средства согласно форме осуществления настоящего изобретения.
[0015] Фиг. 4 представляет собой третью блок-схему последовательности операций способа управления движением транспортного средства согласно форме осуществления настоящего изобретения.
[0016] Фиг. 5 представляет собой структурную схему устройства управления движением транспортного средства согласно форме осуществления настоящего изобретения.
[0017] Фиг. 6 представляет собой схему аппаратной структуры устройства управления движением транспортного средства согласно форме осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ФОРМ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0018] Для того, чтобы сделать цели, технические решения и преимущества настоящего изобретения более ясными, технические решения форм осуществления настоящего изобретения ясно и полностью описаны ниже в сочетании с чертежами форм осуществления настоящего изобретения. Очевидно, что формы осуществления, описанные ниже, являются только частью, а не всеми формами осуществления настоящего изобретения. Любые другие формы осуществления изобретения, полученные специалистами в данной области техники на основе форм осуществления настоящего изобретения без каких-либо творческих усилий, подпадают под объем правовой охраны настоящего изобретения.
[0019] Фиг. 1 представляет собой первую блок-схему последовательности операций способа управления движением транспортного средства согласно форме осуществления настоящего изобретения. Объектом исполнения в этой форме осуществления может быть контроллер, установленный на транспортном средстве. Как показано на фиг.1, способ включает следующие этапы с S101 по S103.
[0020] На этапе S101 получают параметры движения транспортного средства, информацию о характеристиках объекта в передней боковой области транспортного средства и относительную информацию между объектом и транспортным средством. Относительная информация включает в себя относительное поперечное расстояние между объектом и транспортным средством.
[0021] В процессе управления движением транспортного средства требуется получать фактические параметры движения транспортного средства, информацию о характеристиках объекта в передней боковой области транспортного средства и относительную информацию между транспортным средством и объектом, и параметры движения транспортного средства корректируют на основе этих данных так, чтобы уменьшить количество дорожно-транспортных происшествий.
[0022] В частности, параметры движения транспортного средства собираются различными датчиками, установленными на транспортном средстве. Информация о характеристиках объекта в передней боковой области транспортного средства распознается путем сбора изображений, получаемых с помощью камеры, установленной на транспортном средстве. Относительную информацию между объектом в передней боковой области транспортного средства и транспортным средством обнаруживают и измеряют радиолокационной системой, установленной на транспортном средстве.
[0023] Во время процесса движения вышеупомянутые датчик, камера и радиолокационная система соответственно передают получаемые данные в контроллер через шину, и контроллер, соответственно, принимает параметры движения, передаваемые датчиком на транспортном средстве, информацию о характеристиках объекта, передаваемую камерой на транспортном средстве, и относительную информацию, передаваемую радиолокационной системой на транспортном средстве.
[0024] Радиолокационная система содержит радиолокатор переднего обзора, радиолокатор первого переднего угла обзора и радиолокатор второго переднего угла обзора. Радиолокатор переднего обзора установлен на передней противоударной балке транспортного средства, а радиолокатор первого переднего угла обзора и радиолокатор второго переднего угла обзора соответственно установлены на левой и правой сторонах переднего бампера транспортного средства. Радиолокационная система может содержать также радиолокатор первого заднего угла обзора и радиолокатор второго заднего угла обзора. Радиолокатор первого заднего угла обзора и радиолокатор второго заднего угла обзора установлены соответственно на левой и правой сторонах заднего бампера транспортного средства.
[0025] Информация о характеристиках объекта включает расстояние между объектом и целевой разделительной линией. Целевая разделительная линия - это разделительная линия между объектом и транспортным средством, например, у расстояния L1 на фиг. 2. Относительная информация включает в себя относительную продольную скорость между транспортным средством и объектом. Параметры движения включают в себя направление движения транспортного средства.
[0026] Камера установлена во внутреннем зеркале заднего вида у переднего ветрового стекла транспортного средства.
[0027] Передняя боковая область транспортного средства относится к области сбоку перед транспортным средством, расположенной в левой и/или правой соседней полосе движения транспортного средства. Например, транспортное средство А на фиг. 2 имеет соседнюю полосу движения только справа, и тогда объектом в передней боковой области транспортного средства А будет транспортное средство В.
[0028] Объектом может быть транспортное средство, пешеход, препятствие и тому подобное.
[0029] Продольное направление в настоящем описании относится к направлению, параллельному разделительной линии, а поперечное направление относится к направлению, перпендикулярному разделительной линии.
[0030] В этой форме осуществления изобретения радиолокационная система и камера используются для сбора данных так, чтобы реализовать 360-градусный сбор данных без мертвой зоны и повысить точность сбора данных.
[0031] На этапе S102 определяют, необходимо ли формировать команды коррекции параметров в соответствии с параметрами движения, информацией о характеристиках объекта и относительной информацией. Команды коррекции параметров включают в себя команду коррекции расстояния и команду коррекции скорости.
[0032] В этой форме осуществления изобретения в различных условиях движения определяют, в соответствии с параметрами движения, информацией о характеристиках объекта и относительной информацией, оказывает ли объект в передней боковой области транспортного средства воздействие на транспортное средство, например, произойдет ли столкновение, чтобы таким образом определить, следует ли формировать команды коррекции параметров для коррекции параметров движения транспортного средства.
[0033] Условия движения включают в себя первое условие, когда нет разделительной полосы между транспортным средством и соседней полосой движения, и второе условие, когда транспортное средство на соседней полосе движения меняет полосу движения.
[0034] На этапе S103 относительное поперечное расстояние между транспортным средством и объектом корректируют согласно команде коррекции расстояния, и скорость движения транспортного средства корректируют согласно команде коррекции скорости в ответ на формирование команд коррекции параметров.
[0035] В этой форме осуществления изобретения, если определено, в соответствии с текущим состоянием движения самого транспортного средства и ситуацией объекта в передней боковой области, что объект в передней боковой области может повлиять на транспортное средство, формируют соответствующие команды коррекции параметров. Команды коррекции параметров включает в себя команду коррекции расстояния и команду коррекции скорости.
[0036] Когда формируют команду коррекции расстояния, она может быть отправлена в систему электрического усилителя руля (EPS, Electrical Power Steering) на транспортном средстве, и система EPS управляет транспортным средством для изменения направления движения, тем самым увеличивая поперечное расстояние между транспортным средством и целевым объектом, которого необходимо избежать, и предотвращая столкновение транспортного средства с целевым объектом.
[0037] Когда формируют команду коррекции скорости, она может быть отправлена в электронную систему курсовой стабилизации (ESP, Electronic Stability Program) и двигатель для того, чтобы скорректировать скорость транспортного средства, соответственно, и избегать столкновений между транспортным средством и целевым объектом.
[0038] Когда необходимо сформировать команду коррекции параметра, соответствующее сообщение с подсказкой формируют и отправляют на дисплей на комбинации приборов на транспортном средстве, чтобы напомнить водителю и избежать паники.
[0039] Из приведенного выше описания можно увидеть, что состояние движения транспортного средства и состояние объекта в передней боковой области определяют на основе параметров движения транспортного средства, информации о характеристиках объекта в передней боковой области транспортного средства и относительной информации между объектом и транспортным средством, и необходимо определить, повлияет ли объект в передней боковой области на транспортное средство, то есть определить, существует ли риск столкновения. Если транспортное средство подвергается риску столкновения с объектом, формируют соответствующие команды коррекции параметров, чтобы скорректировать относительное поперечное расстояние между транспортным средством и объектом и скорректировать скорость движения транспортного средства, и удержать транспортное средство вдали от объектов, которые могут с ним столкнуться, таким образом эффективно избежать столкновения транспортного средства с объектами в передней боковой области и уменьшить возникновение дорожно-транспортных происшествий.
[0040] Во время процесса движения параметры движения транспортного средства могут корректироваться в соответствии с текущими условиями движения транспортного средства, чтобы предоставить водителю гарантию более безопасного движения. Приведенные ниже примеры осуществления изобретения используются для подробного описания конкретного процесса коррекции параметров движения в различных условиях движения.
[0041] Фиг. 3 представляет собой вторую блок-схему последовательности операций способа управления движением транспортного средства согласно форме осуществления настоящего изобретения. На основе формы осуществления, показанной на фиг. 1, эта форма осуществления подробно описывает конкретный процесс ее реализации. Передняя боковая область включает в себя первую переднюю боковую область, и первая передняя боковая область может быть областью сбоку перед транспортным средством, расположенной на соседней полосе движения в первом направлении от транспортного средства. Первое направление может быть, например, направлением влево или вправо от транспортного средства и тому подобное. В качестве примера первая передняя боковая область в форме осуществления настоящего изобретения, в частности, является областью спереди сбоку транспортного средства, расположенной в соседней полосе движения слева от транспортного средства. Как показано на фиг. 3, способ включает следующие этапы с S301 по S305.
[0042] На этапе S301 получают параметры движения транспортного средства, информацию о характеристиках объекта в передней боковой области транспортного средства и относительную информацию между объектом и транспортным средством. Относительная информация включает в себя относительное расстояние между объектом и транспортным средством в поперечном направлении.
[0043] Вышеописанный этап S301 аналогичен этапу S101 в форме осуществления, показанной на фиг. 1, и не будет повторяться в описании этой форме осуществления.
[0044] На этапе S302 получают первое прогнозируемое время до столкновения, когда нет разделительной полосы между транспортным средством и первой передней боковой областью. Первое прогнозируемое время до столкновения относится ко времени, когда транспортное средство столкнется с первым объектом в первой передней боковой области.
[0045] Когда нет разделительной полосы между полосой движения, где находится транспортное средство, и соседней полосой движения, соответствующей первой передней боковой области, если приближающееся транспортное средство, движущееся в противоположном направлении, близко к разделительной линии и имеет относительно высокую скорость, то оно склонно к столкновению и серьезным дорожно-транспортным происшествиям. Поэтому, когда нет разделительной полосы между полосой движения и соседней полосой движения, необходимо определить, в соответствии с собранными параметрами транспортного средства, информацией о характеристиках первого объекта и относительной информацией между транспортным средством и первым объектом, следует ли корректировать относительное поперечное расстояние между транспортным средством и первым объектом, и следует ли управлять скоростью, чтобы избежать столкновений.
[0046] В процессе определения, следует ли корректировать относительное поперечное расстояние между транспортным средством и первым объектом и корректировать скорость транспортного средства, необходимо рассчитать время до столкновения (ТТС, Time То Collision) на основе собранных параметров движения транспортного средства, информации о характеристиках первого объекта и относительной информации между транспортным средством и первым объектом. Вычисленное время ТТС принимают за первое прогнозируемое время до столкновения.
[0047] Первое прогнозируемое время до столкновения может быть вторым прогнозируемым временем продольного сближения до столкновения, которое вычисляется в соответствии с относительным продольным расстоянием между транспортным средством и первым объектом.
[0048] Направление движения, определяемое полосой движения, соответствующей первой передней боковой области, противоположно направлению движения транспортного средства.
[0049] Существует много отработанных способов расчета времени до столкновения, и способ расчета времени до столкновения не ограничивается настоящим изобретением.
[0050] На этапе S303 определяют, удовлетворяется ли по меньшей мере одно из следующих первых условий оценки пороговых значений.
[0051] Первые пороговые условия оценки включают:
первая относительная продольная скорость между первым объектом в первой передней боковой области и транспортным средством превышает заранее заданное пороговое значение для первой скорости;
первое расстояние между первым объектом и первой целевой разделительной линией меньше заранее заданного порогового значения для первого расстояния; и
первое прогнозируемое время до столкновения меньше заранее заданного порогового значения для первого времени.
[0052] В этой форме осуществления изобретения определяют, превышает ли первая относительная продольная скорость между первым объектом и транспортным средством соответствующее пороговое значение первый скорости, меньше ли первое расстояние между первым объектом и первой разделительной линией соответствующего порогового значения первого расстояния, и меньше ли первое прогнозируемое время до столкновения первого порогового значения времени.
[0053] На этапе S304 определяют, что необходимо сформировать команду коррекции расстояния и команду коррекции скорости в ответ на удовлетворение по меньшей мере одного из первых пороговых условий оценки.
[0054] В этой форме осуществления изобретения, в том случае, когда удовлетворяется по меньшей мере одно из первых пороговых условий оценки, формируют команду коррекции расстояния и команду коррекции скорости. Например, удовлетворяется только то пороговое условие оценки, что первая относительная продольная скорость между первым объектом и транспортным средством превышает соответствующее пороговое значение первый скорости, и в этом случае определяют, что транспортное средство вероятно столкнется с первым объектом. Команда коррекции расстояния и команда коррекции скорости должны быть сформированы, чтобы заставить транспортное средство двигаться в поперечном направлении от первого объекта и замедляться в соответствии с заранее заданным значением замедления до тех пор, пока транспортное средство не замедлится до заранее заданной скорости, гарантируя, что транспортное средство движется на безопасном относительном поперечном расстоянии и с относительной продольной скоростью относительно первого объекта во избежание столкновений.
[0055] В форме осуществления изобретения, чтобы повысить точность определения, столкнется ли транспортное средство с первым объектом, команда коррекции расстояния и команда коррекции скорости могут формироваться, когда все пороговые условия оценки в вышеуказанных первых пороговых условиях оценки удовлетворяются одновременно. То есть, когда первая относительная продольная скорость между первым объектом и транспортным средством превышает заранее заданное пороговое значение для первой скорости, первое расстояние между первым объектом и первой целевой разделительной линией меньше заранее заданного порогового значения для первого расстояния, прогнозируемое первое время до столкновения меньше заранее заданного порогового значения для первого времени до столкновения, определяют, что транспортное средство скорее всего столкнется с первым объектом, и необходимо сформировать команду коррекции расстояния и команду коррекции скорости.
[0056] В форме осуществления изобретения получают второе прогнозируемое время поперечного сближения до столкновения. Пороговое условие оценки, заключающееся в том, что первое расстояние между первым объектом и первой целевой разделительной линией меньше заранее заданного порогового значения для первого расстояния среди вышеупомянутых первых условий оценки порогового значения, может быть заменено тем, что второе прогнозируемое время поперечного сближения до столкновения меньше заранее заданного порогового значения для второго времени поперечного сближения, и замененные первые пороговые условия оценки включают в себя то, что первая относительная продольная скорость между первым объектом в передней боковой области и транспортным средством превышает заранее заданное пороговое значение для первой скорости, второе прогнозируемое время поперечного сближения до столкновения меньше заранее заданного порогового значения для второго времени поперечного сближения до столкновения, и первое прогнозируемое время до столкновения меньше заранее заданного порогового значения для первого времени.
[0057] Следует понимать, что вышеприведенное определение первой передней боковой области как области сбоку перед транспортным средством, расположенной в соседней полосе движения слева от транспортного средства, сделано только для удобства понимания. На практике контролируют не только соседнюю полосу движения слева от транспортного средства, но также и соседнюю полосу движения справа от транспортного средства. Когда текущая полоса движения транспортного средства имеет только одну соседнюю полосу движения, первая передняя боковая область является областью сбоку перед транспортным средством на соседней полосе движения. Например, когда соседняя полоса движения есть только слева от транспортного средства, первая передняя боковая область является боковой областью перед транспортным средством в соседней полосе движения слева от транспортного средства. Когда соседняя полоса движения есть только справа от транспортного средства, первая передняя боковая область - это боковая область перед транспортным средством в соседней полосе движения справа от транспортного средства. Здесь не ограничивается, является ли полоса движения, соответствующая указанной выше первой передней боковой области, соседней полосой движения справа или слева от транспортного средства.
[0058] В возможной ситуации транспортное средство может также иметь две соседние полосы движения, включая левую соседнюю полосу движения и правую соседнюю полосу движения. Соответственно, передняя боковая область также включает в себя третью переднюю боковую область. Третья передняя боковая область представляет собой боковую область перед транспортным средством на соседней полосе движения во втором направлении от транспортного средства. Второе направление может быть правым направлением от транспортного средства. Первые пороговые условия оценки включают в себя также отсутствие риска столкновения в третьей передней боковой области.
[0059] Соответственно, определение, следует ли формировать команды коррекции параметров в соответствии с параметрами движения, информацией о характеристиках объекта и относительной информацией, включает в себя:
определение, удовлетворяется ли по меньшей мере одно из следующих первых пороговых условий оценки:
первая относительная продольная скорость между первым объектом в первой передней боковой области и транспортным средством превышает заранее заданное пороговое значение для первой скорости;
первое расстояние между первым объектом и первой целевой разделительной линией меньше заранее заданного порогового значения для первого расстояния;
первое прогнозируемое время до столкновения меньше заранее заданного порогового значения для первого времени; и
отсутствует риск столкновения в третьей передней боковой области;
определение необходимости формировать команду коррекции расстояния и команду коррекции скорости в ответ на удовлетворение по меньшей мере одного из первых пороговых условий оценки.
[0060] Когда есть соседние полосы движения, как в левом, так и в правом направлениях от транспортного средства, необходимо определить, превышает ли первая относительная продольная скорость между первым объектом и транспортным средством соответствующее пороговое значение первой скорости, определить, является ли первое расстояние между первым объектом и первой целевой разделительной линией меньше соответствующего порогового значения первого расстояния, определить, является ли первое прогнозируемое время до столкновения меньше первого порогового значения времени, и определить, есть ли риск столкновения в третьей передней боковой области. Когда по меньшей мере одно из первых условий пороговой оценки удовлетворяется, например, первая относительная продольная скорость между первым объектом и транспортным средством превышает соответствующее пороговое значение первой скорости, может быть определено, что транспортное средство, вероятно, столкнется с первым объектом. В таком случае должны быть сформированы команда коррекции расстояния и команда коррекции скорости, чтобы вызвать движение транспортного средства в поперечном направлении от первого объекта и замедлить в соответствии с заранее заданным значением замедления до тех пор, пока транспортное средство не затормозится до заранее заданной скорости, гарантируя, что транспортное средство движется на безопасном относительном поперечном расстоянии и с безопасной относительной продольной скоростью относительно первого объекта, таким образом, чтобы избежать столкновений.
[0061] В одной форме осуществления изобретения, для того, чтобы улучшить точность определения, столкнется ли транспортное средство с первым объектом, и избежать столкновений с объектом в третьей передней боковой области, необходимо объединить условия двух соседних полос, чтобы сделать комплексную оценку, следует ли формировать команду коррекции расстояния и команду коррекции скорости. То есть, когда все условия пороговой оценки в первых условиях пороговой оценки удовлетворяются, формируют команду коррекции расстояния и команду коррекции скорости. Когда транспортное средство движется в поперечном направлении от первого объекта, то есть при перемещении в поперечном направлении к соседней полосе движения вправо, существует риск столкновения с объектом в соседней полосе. Таким образом, на основании удовлетворения тех пороговых условий оценки, что первая относительная продольная скорость между первым объектом в первой передней боковой области и транспортным средством превышает заранее заданное пороговое значение для первой скорости, первое расстояние между первым объектом и первой целевой разделительной линией меньше заранее заданного порогового значения для первого расстояния, и первое прогнозируемое время до столкновения меньше заранее заданного порогового значения для первого времени, необходимо также определить, что удовлетворяется пороговое условие отсутствия риска столкновения в третьей передней боковой области.
[0062] Когда сформированы команда коррекции расстояния и команда коррекции скорости, транспортное средство управляется согласно команде коррекции расстояния и команде коррекции скорости, чтобы двигаться вбок в направлении от первого объекта. Расстояние перемещения - это третье заранее заданное расстояние перемещения, и скорость снижается до первой заранее заданной скорости.
[0063] В этой форме осуществления изобретения при определении, существует ли риск столкновения в третьей передней боковой области, определяют, есть ли в ней третий объект. Если в третьей передней боковой области есть третий объект, определяют направление движения третьего объекта и получают второе расстояние между третьим объектом и второй целевой разделительной линией. Если направление движения третьего объекта противоположно направлению движения транспортного средства, определяют, превышает ли второе расстояние его заранее заданное пороговое значение. Если второе расстояние превышает его пороговое значение, определяют, что нет риска столкновения в третьей передней боковой области.
[0064] Если направление движения третьего объекта является таким же, как направление движения транспортного средства, получают первое расстояние до столкновения. Первое расстояние до столкновения является расстоянием между третьим объектом и транспортным средством. Определяют, является ли первое расстояние до столкновения больше его соответствующего порогового значения, и является ли второе расстояние больше его соответствующего порогового значения, соответственно.
[0065] Если первое расстояние до столкновения больше его соответствующего порогового значения, а второе расстояние больше его соответствующего порогового значения, определяют, что нет риска столкновения в третьей передней боковой области.
[0066] Вторая целевая разделительная линия относится к разделительной линии между транспортным средством и третьей передней боковой областью, то есть является разделительной линией между полосой движения, на которой находится транспортное средство, и полосой движения, соответствующей третьей передней боковой области.
[0067] В этой форме осуществления изобретения, когда обнаруживают, что в третьей передней боковой области нет третьего объекта, определяют, что нет риска столкновения в третьей передней боковой области. Когда в третьей передней боковой области есть третий объект, необходимо определить, столкнется ли транспортное средство с третьим объектом. Когда направление движения третьего объекта противоположно направлению движения транспортного средства, определяют, больше ли второе расстояние его порогового значения. Когда второе расстояние больше его порогового значения, определяют, что нет риска столкновения в третьей передней боковой области. Когда направление движения третьего объекта совпадает с направлением движения транспортного средства, получают первое расстояние до столкновения (DTC, Distance То Collision), такое как L2 на фиг. 2. Определяют, превышает ли первое DTC его соответствующее пороговое значение, и превышает ли второе расстояние его соответствующее пороговое значение, соответственно. Когда первое DTC больше его соответствующего порогового значения, а второе расстояние больше его соответствующего порогового значения, определяют отсутствие риска столкновения в третьей передней боковой области.
[0068] Следует понимать, что указанное выше определение третьей передней боковой области как области сбоку перед транспортным средством в соседней полосе движения справа от транспортного средства предназначено только для того, чтобы отличать третью переднюю боковую область от первой передней боковой области. На практике, когда первая передняя боковая область представляет собой область сбоку перед транспортным средством в соседней полосе движения справа от транспортного средства, третья передняя боковая область представляет собой область сбоку перед транспортным средством в соседней полосе слева от транспортного средства.
[0069] В вышеописанном процессе определения, необходимо ли формировать команду коррекции расстояния и команду коррекции скорости, если включены противотуманные фары или ближний свет транспортного средства, переключатель стеклоочистителя находится на максимальной передаче или радиус кривизны дороги меньше заранее заданного радиуса, во избежание опасности, не требуется формировать команду коррекции расстояния и команду коррекции скорости.
[0070] На этапе S305, если сформированы команды коррекции параметров, относительное поперечное расстояние между транспортным средством и объектом корректируют согласно команде коррекции расстояния, и скорость движения транспортного средства корректируют согласно команде коррекции скорости.
[0071] Вышеописанный этап S305 аналогичен этапу S103 в форме осуществления изобретения, показанной на фиг. 1, и не будет повторяться в этой форме осуществления изобретения.
[0072] В этой форме осуществления изобретения, когда нет разделительной полосы между полосой движения, на которой расположено транспортное средство, и соседней полосой движения, соответствующей первой передней боковой области, определяют в соответствии с параметрами движения транспортного средства, информации о характеристиках первого объекта в первой передней боковой области и относительной информации между транспортным средством и первым объектом, существует ли риск столкновения транспортного средства с первым объектом. Если существует риск столкновения, транспортное средство управляют для перемещения вбок на определенное расстояние в направлении от первой передней боковой области и для снижения скорости движения транспортного средства, таким образом эффективно избегая столкновений.
[0073] Фиг. 4 представляет собой третью блок-схему последовательности операций способа управления движением транспортного средства согласно форме осуществления настоящего изобретения. На основе формы осуществления изобретения, показанной на фиг.1, эта форма осуществления изобретения подробно описывает конкретный процесс реализации этой формы осуществления изобретения. Передняя боковая область включает в себя вторую переднюю боковую область, а вторая передняя боковая область представляет собой область сбоку перед транспортным средством на соседней полосе движения в первом направлении от транспортного средства. Первое направление может быть, например, направлением влево или вправо от транспортного средства и тому подобное. В качестве примера вторая передняя боковая область в форме осуществления настоящего изобретения, в частности, является областью сбоку перед транспортным средством в соседней полосе движения слева от транспортного средства. Как показано на фиг. 4, способ включает следующие этапы с S401 по S405.
[0074] На этапе S401 получают параметры движения транспортного средства, информацию о характеристиках объекта в передней боковой области транспортного средства и относительную информацию между объектом и транспортным средством. Относительная информация включает в себя относительное поперечное расстояние между объектом и транспортным средством.
[0075] Вышеописанный этап S401 аналогичен этапу S101 в форме осуществления изобретения, показанной на фиг. 1, и не будет повторяться в этой форме осуществления изобретения.
[0076] На этапе S402 получают первое прогнозируемое время поперечного сближения до столкновения и первое прогнозируемое время продольного сближения до столкновения в ответ на обнаружение того, что второй объект во второй передней боковой области входит в область прямо перед транспортным средством.
[0077] Когда второй объект во второй передней боковой области внезапно переходит в полосу движения, где находится транспортное средство, или имеет тенденцию менять полосы движения, он склонен к столкновениям и серьезным дорожно-транспортным происшествиям. Следовательно, чтобы избежать дорожно-транспортного происшествия, когда транспортное средство обнаруживает, что второй объект во второй передней боковой области входит в область прямо перед транспортным средством, определяют, в соответствии с параметрами движения транспортного средства, информацией о характеристиках второго объекта и относительной информацией между транспортным средством и вторым объектом, необходимо ли переместиться вбок на определенное расстояние в направлении от второго объекта и замедлить транспортное средство таким образом, чтобы уменьшить панику водителя, избежать несчастных случаев при столкновении и повысить безопасность движения.
[0078] Направление движения, задаваемое полосой движения, соответствующей второй передней боковой области, совпадает с направлением движения транспортного средства.
[0079] На этапе S403 определяют, удовлетворяется ли по меньшей мере одно из следующих вторых пороговых условий оценки.
[0080] Вторые пороговые условия оценки включают:
вторая относительная продольная скорость между вторым объектом во второй передней боковой области и транспортным средством превышает заранее заданное пороговое значение для второй скорости;
первое прогнозируемое время поперечного сближения до столкновения меньше заранее заданного порогового значения для первого времени поперечного сближения до столкновения; и
первое прогнозируемое время продольного сближения до столкновения меньше заранее заданного порогового значения для первого времени продольного сближения до столкновения.
[0081] В этой форме осуществления изобретения определяют, превышает ли вторая относительная продольная скорость между вторым объектом и транспортным средством заранее заданное пороговое значение для второй скорости, определяют, меньше ли первое прогнозируемое время поперечного сближения до столкновения чем заранее заданное пороговое значение для первого времени поперечного сближения до столкновения, и определяют, меньше ли первое прогнозируемое время продольного сближения до столкновения чем заранее заданное пороговое значение для первого времени продольного сближения.
[0082] Первое прогнозируемое время поперечного сближения до столкновения вычисляют на основе относительного поперечного расстояния и относительной поперечной скорости между транспортным средством и вторым объектом, а первое прогнозируемое время продольного сближения до столкновения вычисляют на основе относительного продольного расстояния и относительной продольной скорости между транспортным средством и вторым объектом.
[0083] На этапе S404 определяют, что необходимо сформировать команду коррекции расстояния и команду коррекции скорости в ответ на удовлетворение по меньшей мере одного из вторых пороговых условий оценки.
[0084] В этой форме осуществления изобретения при определении, что удовлетворяется по меньшей мере одно из вторых пороговых условий оценки, формируют команду коррекции расстояния, чтобы заставить транспортное средство переместиться вбок в направлении от второго объекта, и формируют команду коррекции скорости, чтобы заставить транспортное средство замедлиться в соответствии с заранее заданным значением замедления до тех пор, пока транспортное средство не замедлится до заранее заданной скорости, гарантируя, что транспортное средство движется на безопасном относительном поперечном расстоянии и с безопасной относительной продольной скоростью относительно второго объекта, чтобы избежать столкновений.
[0085] В форме осуществления изобретения, чтобы повысить точность определения, столкнется ли транспортное средство со вторым объектом, команда коррекции расстояния и команда коррекции скорости могут быть сформированы, когда удовлетворяются все пороговые условия оценки в вышеуказанных вторых пороговых условиях оценки.
[0086] В форме осуществления изобретения получают третье расстояние между вторым объектом и третьей целевой разделительной линией. Пороговое условие оценки в вышеуказанных вторых пороговых условиях оценки, что первое прогнозируемое время поперечного сближения до столкновения меньше заранее заданного порогового значения для первого времени поперечного сближения до столкновения, может быть заменено тем, что третье расстояние между вторым объектом и третьей целевой разделительной линией меньше его заранее заданного порогового значения.
[0087] Следует понимать, что вышеописанное определение второй передней боковой области как передней боковой области транспортного средства в соседней полосе движения слева от транспортного средства сделано только для удобства понимания. На практике контролируют не только соседнюю полосу движения слева от транспортного средства, но также и соседнюю полосу движения справа от транспортного средства. Когда текущая полоса движения транспортного средства имеет только одну соседнюю полосу движения, вторая передняя боковая область является боковой областью перед транспортным средством на соседней полосе движения. Например, когда имеется только соседняя полоса движения слева от транспортного средства, вторая передняя боковая область представляет собой боковую область перед транспортным средством в соседней полосе движения слева от него. Когда имеется только соседняя полоса движения справа от транспортного средства, вторая передняя боковая область представляет собой боковую область перед транспортным средством в соседней полосе движения справа от него. Здесь не ограничивается, является ли полоса движения, соответствующая указанной выше второй передней боковой области, соседней полосой движения справа или слева от транспортного средства.
[0088] В возможном окружении транспортное средство может иметь также две соседние полосы движения, включая левую и правую соседние полосы движения. Соответственно, передняя боковая область включает в себя также четвертую переднюю боковую область. Четвертая передняя боковая область представляет собой боковую область перед транспортным средством в соседней полосе движения во втором направлении от транспортного средства. Второе направление может быть направлением вправо от транспортного средства. Вторые пороговые условия оценки включают в себя также отсутствие риска столкновения в четвертой передней боковой области.
[0089] Соответственно, определение, следует ли формировать команды коррекции параметров в соответствии с параметрами движения, информацией о характеристиках объекта и относительной информацией, включает в себя:
определение, удовлетворяется ли по меньшей мере одно из следующих вторых пороговых условий оценки:
вторая относительная продольная скорость между вторым объектом во второй передней боковой области и транспортным средством превышает заранее заданное пороговое значение для второй скорости;
первое прогнозируемое время поперечного сближения до столкновения меньше заранее заданного порогового значения для первого времени поперечного сближения; и
первое прогнозируемое время продольного сближения до столкновения меньше заранее заданного порогового значения для первого времени продольного сближения до столкновения; и
отсутствует риск столкновения в четвертой передней боковой области;и
определение необходимости формирования команды коррекции расстояния и команды коррекции скорости в ответ на удовлетворение по меньшей мере одного из вторых пороговых условий оценки.
[0090] В форме осуществления изобретения, когда есть соседние полосы движения, как в левом, так и в правом направлениях от транспортного средства, необходимо определить, превышает ли вторая относительная продольная скорость между вторым объектом и транспортным средством заранее заданное пороговое значение для второй скорости, меньше ли первое прогнозируемое время поперечного сближения до столкновения чем заранее заданное пороговое значение для первого времени поперечного сближения, меньше ли первое прогнозируемое время продольного сближения до столкновения чем заранее заданное пороговое значение для первого времени продольного сближения до столкновения, и нет ли риска столкновения в четвертой передней боковой области. Когда по меньшей мере одно из вторых пороговых условий оценки удовлетворяется, например, вторая относительная боковая скорость между вторым объектом и транспортным средством превышает соответствующее порогового значения второй скорости, может быть определено, что транспортное средство вероятно столкнется со вторым объектом. После этого необходимо сформировать команду коррекции расстояния и команду коррекции скорости, чтобы заставить транспортное средство двигаться в поперечном направлении в направлении от второго объекта и замедляться в соответствии с заранее заданным значением замедления до тех пор, пока транспортное средство не замедлится до заранее заданной скорости, гарантируя, что транспортное средство движется на безопасном относительным поперечным расстоянием и с относительной продольной скоростью относительно второго объекта так, чтобы избежать столкновений.
[0091] В форме осуществления изобретения, чтобы повысить точность определения, столкнется ли транспортное средство со вторым объектом, и избежать столкновения с объектом в четвертой передней боковой области, необходимо объединить условия двух соседних полос движения, чтобы выполнить исчерпывающую оценку того, следует ли формировать команду коррекции расстояния и команду коррекции скорости. То есть, когда все пороговые условия оценки во вторых пороговых условиях оценки удовлетворяются, формируют команду коррекции расстояния и команду коррекции скорости. Когда транспортное средство движется вбок в направлении от второго объекта, то есть при движении вбок в сторону соседней полосы движения в направлении вправо, существует риск столкновения с объектом на соседней полосе движения. Следовательно, на основании удовлетворения пороговых условий оценки о том, что вторая относительная продольная скорость между вторым объектом и транспортным средством превышает заранее заданное пороговое значение для второй скорости, первое прогнозируемое время поперечного сближения до столкновения меньше заранее заданного порогового значения для первого времени поперечного сближения, и первое прогнозируемое время продольного сближения до столкновения меньше заранее заданного порогового значения для первого времени продольного сближения до столкновения, необходимо также определить пороговое условие оценки, что не существует риска столкновения в четвертой передней боковой области.
[0092] В этой форме осуществления изобретения при определении, существует ли риск столкновения в четвертой передней боковой области, определяют, есть ли четвертый объект в четвертой передней боковой области. Если в четвертой передней боковой области есть четвертый объект, получают направление движения четвертого объекта и получают четвертое расстояние между четвертым объектом и четвертой целевой разделительной линией. Если направление движения четвертого объекта противоположно направлению движения транспортного средства, определяют, превышает ли четвертое расстояние его заранее заданное пороговое значение. Если четвертое расстояние превышает его пороговое значение, определяют, что нет риска столкновения в четвертой передней боковой области.
[0093] Если направление движения четвертого объекта совпадает с направлением движения транспортного средства, определяют второе расстояние до столкновения. Второе расстояние до столкновения - это расстояние между четвертым объектом и транспортным средством. Определяют, больше ли второе расстояние до столкновения его соответствующего порогового значения, и больше ли четвертое расстояние его соответствующего порогового значения, соответственно.
[0094] Если второе расстояние до столкновения больше его соответствующего порогового значения, а четвертое расстояние больше его соответствующего порогового значения, определяют, что нет риска столкновения в четвертой передней боковой области.
[0095] Следует понимать, что вышеописанное определение четвертой передней боковой области как области сбоку перед транспортным средством в соседней полосе движения справа от транспортного средства предназначено только для различения четвертой передней боковой области от второй передней боковой области. На практике, когда вторая передняя боковая область является областью сбоку перед транспортным средством в соседней полосе движения справа от транспортного средства, четвертая передняя боковая область является областью сбоку перед транспортным средством в соседней полосе слева от транспортного средства.
[0096] В вышеописанном процессе определения, необходимо ли формировать команду коррекции расстояния и команду коррекции скорости, если включены противотуманные фары или ближний свет транспортного средства, переключатель стеклоочистителя находится на максимальной передаче или радиус кривизны дороги меньше заранее заданного радиуса, во избежание опасности формировать команду коррекции расстояния и команду коррекции скорости не требуется.
[0097] На этапе S405, если сформированы команды коррекции параметров, относительное поперечное расстояние между транспортным средством и объектом корректируют согласно команде коррекции расстояния, и скорость движения транспортного средства корректируют согласно команде коррекции скорости.
[0098] Вышеописанный этап S405 аналогичен этапу S103 в форме осуществления изобретения, показанной на фиг. 1, и не будет повторяться в этой форме осуществления изобретения.
[0099] В этой форме осуществления изобретения, когда нет разделительной полосы между полосой движения, где находится транспортное средство, и соседней полосой движения, соответствующей второй передней боковой области, в соответствии с параметрами движения транспортного средства, информации о характеристиках второго объекта во второй передней боковой области и относительной информации между транспортным средством и вторым объектом определяют, существует ли риск столкновения транспортного средства со вторым объектом. Если существует риск столкновения, транспортным средством управляют для перемещения вбок на определенное расстояние по направлению от второй передней боковой области и снижают скорость движения транспортного средства, таким образом эффективно избегая столкновений.
[0100] В форме осуществления изобретения условия движения включают в себя третье условие, когда транспортному средству необходимо обогнать объект в передней боковой области.
[0101] В форме осуществления изобретения передняя боковая область включает пятую переднюю боковую область. Пятая передняя боковая область может быть областью сбоку перед транспортным средством на соседней полосе движения в первом направлении от транспортного средства. Первое направление может быть, например, левым или правым направлением от транспортного средства и тому подобное. В качестве примера пятая передняя боковая область в форме осуществления настоящего изобретения, в частности, представляет собой область, расположенную сбоку перед транспортным средством на соседней полосе движения слева от транспортного средства.
[0102] В условиях движения, когда транспортное средство должно обогнать объект в передней боковой области, процесс коррекции параметров движения транспортного средства включает следующие этапы:
[0103] 1) Когда транспортному средству необходимо обогнать пятый объект в пятой передней боковой области, получают второе прогнозируемое время до столкновения. Второе прогнозируемое время до столкновения - это время, когда транспортное средство столкнется с пятым объектом.
[0104] 2) Определяют, удовлетворяется ли по меньшей мере одно из следующих третьих пороговых условий оценки. Третьи пороговые условия оценки включают:
третья относительная продольная скорость между пятым объектом и транспортным средством превышает заранее заданное пороговое значение для третьей скорости;
пятое расстояние между пятым объектом и пятой целевой разделительной линией меньше заранее заданного порогового значения для пятого расстояния; и
второе прогнозируемое время до столкновения меньше заранее заданного порогового значения для второго времени.
[0105] В этой форме осуществления изобретения определяют, превышает ли третья относительная продольная скорость между пятым объектом и транспортным средством соответствующее пороговое значение третьей скорости, определяют, является ли пятое расстояние между пятым объектом и пятой целевой разделительной линией меньше соответствующего порогового значения пятого расстояния, и определяют, меньше ли второе прогнозируемое время до столкновения заранее заданного порогового значения для второго времени.
[0106] 3) Если удовлетворяется по меньшей мере одно из третьих пороговых условий оценки, определяют, что необходимо сформировать команду коррекции расстояния.
[0107] 4) Если сформирована команда коррекции расстояния, относительное поперечное расстояние между транспортным средством и объектом корректируют в соответствии с командой коррекции расстояния.
[0108] В этой форме осуществления изобретения, если пятый объект является движущимся транспортным средством, и если относительная скорость транспортного средства, когда транспортное средство обгоняет пятый объект, слишком высока, давление воздуха между транспортным средством и пятым объектом уменьшается, что приводит к уменьшению относительного поперечного расстояния между автомобилем и пятым объектом, которое может не только вызвать психологическую панику у водителя, но и стать причиной дорожно-транспортных происшествий, таких как царапины или столкновения. Если пятым объектом является пешеход, препятствие или неподвижное транспортное средство, возникнет опасность столкновения, когда пятый объект окажется близко к разделительной линии. Таким образом, когда транспортному средству необходимо обогнать пятый объект в пятой передней боковой области, необходимо определить, следует ли корректировать относительное поперечное расстояние между транспортным средством и пятым объектом на основе собранных параметров движения транспортного средства, информации о характеристиках пятого объекта и относительной информации между транспортным средством и пятым объектом, чтобы держать транспортное средство подальше от пятого объекта и избегать столкновений.
[0109] Направление движения, определяемое соседней полосой движения, соответствующей пятой передней боковой области, может быть таким же, как направление движения транспортного средства.
[0110] В процессе определения, следует ли корректировать относительное поперечное расстояние между транспортным средством и пятым объектом, необходимо сначала вычислить время до столкновения (ТТС) на основании собранных параметров движения транспортного средства, информации о характеристиках пятого объекта и относительной информации между транспортным средством и пятым объектом, и вычисленное время до столкновения служит вторым прогнозируемым временем до столкновения.
[0111] Существует много отработанных способов расчета времени до столкновения, и способ расчета времени до столкновения не ограничивается настоящим изобретением.
[0112] В этой форме осуществления изобретения, если удовлетворяется по меньшей мере одно из третьих пороговых условий оценки, формируют команду коррекции расстояния. Например, если удовлетворяется только то пороговое условие оценки, согласно которому третья относительная продольная скорость между пятым объектом и транспортным средством превышает соответствующее пороговое значение третьей скорости, может быть определено, что транспортное средство вероятно столкнется с пятым объектом, и это означает, что необходимо скорректировать поперечное расстояние между автомобилем и пятым объектом. Таким образом, формируют команду коррекции расстояния, чтобы заставить транспортное средство сдвинуться вбок на первое заранее заданное расстояние перемещения в направлении от пятого объекта, чтобы уклониться от пятого объекта.
[0113] В форме осуществления изобретения, чтобы повысить точность определения, столкнется ли транспортное средство с пятым объектом, команда коррекции расстояния может быть сформирована, когда удовлетворяются все пороговые условия оценки в третьих пороговых условиях оценки. То есть в случае, если третья относительная продольная скорость между пятым объектом и транспортным средством превышает пороговое значение третьей скорости, пятое расстояние между пятым объектом и пятой целевой разделительной линией меньше порогового значения пятого расстояния, и второе прогнозируемое время до столкновения меньше заранее заданного порогового значения для второго времени, определяют, что транспортное средство с большей вероятностью столкнется с пятым объектом, и необходимо сформировать команду коррекции расстояния.
[0114] После обгона пятого объекта на определенное расстояние (например, 10 метров) можно управлять транспортным средством так, чтобы отвести его обратно в центральную зону полосы движения, чтобы продолжить движение. Если транспортному средству необходимо последовательно обогнать несколько объектов, транспортное средство отводится обратно в центральную зону полосы движения, чтобы продолжить движение, после последовательного обгона нескольких объектов на определенное расстояние.
[0115] Следует понимать, что вышеописанное определение пятой передней боковой области как области сбоку перед транспортным средством в соседней полосе движения слева от транспортного средства сделано только для удобства понимания. На практике контролируют не только соседнюю полосу движения слева от транспортного средства, но также и соседнюю полосу движения справа от транспортного средства. Когда текущая полоса движения транспортного средства имеет только одну соседнюю полосу движения, пятая передняя боковая область является областью сбоку перед транспортным средством на соседней полосе движения. Например, когда есть только соседняя полоса движения слева от транспортного средства, пятая передняя боковая область представляет собой боковую область перед транспортным средством в соседней полосе движения слева от транспортного средства. Когда есть только соседняя полоса движения справа от транспортного средства, пятая передняя боковая область представляет собой боковую область перед транспортным средством в соседней полосе движения справа от транспортного средства. Здесь не ограничивается, является ли полоса движения, соответствующая вышеупомянутой пятой передней боковой области, соседней полосой движения справа или слева от транспортного средства.
[0116] В возможном окружении транспортное средство может также иметь две соседние полосы движения, включая левую и правую соседние полосы движения. Соответственно, передняя боковая область включает также шестую переднюю боковую область. Шестая передняя боковая область представляет собой боковую область перед транспортным средством на соседней полосе движения во втором направлении от транспортного средства. Первое направление от транспортного средства отличается от второго направления от транспортного средства. Третьи пороговые условия оценки включают в себя также отсутствие риска столкновения в шестой передней боковой области.
[0117] Соответственно, определение того, следует ли формировать команды коррекции параметров в соответствии с параметрами движения, информацией о характеристиках объекта и относительной информацией, включает в себя:
определение, удовлетворяется ли по меньшей мере одно из следующих третьих пороговых условий оценки:
третья относительная продольная скорость между пятым объектом и транспортным средством превышает заранее заданное пороговое значение для третьей скорости;
пятое расстояние между пятым объектом и пятой целевой разделительной линией меньше заранее заданного порогового значения для пятого расстояния;
второе прогнозируемое время до столкновения меньше заранее заданного порогового значения для второго времени; и
отсутствует риск столкновения в шестой передней боковой области;
определение необходимости формировать команду коррекции расстояния в ответ на удовлетворение по меньшей мере одного из третьих пороговых условий оценки.
[0118] Если первое направление - левое, то второе направление - правое. Когда есть соседние полосы движения, как в левом, так и в правом направлениях от транспортного средства, необходимо определить, превышает ли третья относительная продольная скорость между пятым объектом и транспортным средством соответствующее пороговое значение третьей скорости, определить, является ли пятое расстояние между пятым объектом и пятой целевой разделительной линией меньше соответствующего порогового значения пятого расстояния, определить, меньше ли второе прогнозируемое время до столкновения порогового значения второго времени, и определить, существует ли риск столкновения в шестой передней боковой области. Когда по меньшей мере одно из третьих пороговых условий оценки удовлетворяется, например, третья относительная продольная скорость между пятым объектом и транспортным средством превышает соответствующее пороговое значение третьей скорости, может быть определено, что транспортное средство вероятно столкнется с пятым объектом, это означает, что необходимо скорректировать поперечное расстояние между транспортным средством и пятым объектом. Таким образом, формируют команду коррекции расстояния, чтобы заставить транспортное средство сдвинуться вбок на первое предварительно заранее заданное расстояние перемещения в направлении от пятого объекта, чтобы уклониться от пятого объекта.
[0119] В форме осуществления изобретения, чтобы повысить точность определения, столкнется ли транспортное средство с пятым объектом, и избежать столкновения с объектом в шестой передней боковой области, необходимо объединить условия двух соседних полос движения, чтобы выполнить исчерпывающую оценку, следует ли формировать команду коррекции расстояния. То есть, когда все пороговые условия оценки в третьих условиях пороговой оценки удовлетворяются, формируют команду коррекции расстояния. Когда транспортное средство движется поперечно в направлении от пятого объекта в пятой передней боковой области, то есть при движении поперечно на соседнюю полосу движения в направлении вправо, существует риск столкновения с объектом на соседней полосе движения. Следовательно, на основе удовлетворения пороговых условий оценки о том, что третья относительная продольная скорость между пятым объектом и транспортным средством превышает пороговое значение третьей скорости, пятое расстояние между пятым объектом и пятой целевой разделительной линией меньше порогового значения пятого расстояния, и второе прогнозируемое время до столкновения меньше заранее заданного порогового значения для второго времени, необходимо также определить, что нет риска столкновения в шестой передней боковой области.
[0120] В этой форме осуществления изобретения при определении наличия риска столкновения в шестой передней боковой области определяют, есть ли шестой объект в шестой передней боковой области. Если есть шестой объект в шестой передней боковой области, определяют направление движения шестого объекта и получают шестое расстояние между шестым объектом и шестой целевой разделительной линией. Если направление движения шестого объекта противоположно направлению движения транспортного средства, определяют, превышает ли шестое расстояние заранее заданное пороговое значение для шестого расстояния. Если шестое расстояние больше порогового значения шестого расстояния, определяют, что нет риска столкновения в шестой передней боковой области.
[0121] Если направление движения шестого объекта совпадает с направлением движения транспортного средства, получают третье расстояние до столкновения. Третье расстояние до столкновения - это расстояние между шестым объектом и транспортным средством. Определяют, больше ли третье расстояние до столкновения соответствующего порогового значения третьего расстояния до столкновения, и больше ли шестое расстояние соответствующего порогового значения шестого расстояния, соответственно.
[0122] Если третье расстояние до столкновения больше соответствующего порогового значения третьего расстояния до порога столкновения, а шестое расстояние больше соответствующего порогового значения шестого расстояния, определяют, что нет риска столкновения в шестой передней боковой области.
[0123] В этой форме осуществления изобретения, когда обнаруживают, что в шестой передней боковой области нет шестого объекта, определяют, что нет риска столкновения в шестой передней боковой области. Когда в шестой передней боковой области находится шестой объект, необходимо определить, столкнется ли транспортное средство с шестым объектом. Конкретный процесс определения описывается следующим образом. Получают направление движения шестого объекта и получают шестое расстояние между шестым объектом и шестой целевой разделительной линией. Когда направление движения шестого объекта противоположно направлению движения транспортного средства, определяют, превышает ли шестое расстояние пороговое значение шестого расстояния. Когда шестое расстояние больше порогового значения шестого расстояния, определяют, что нет риска столкновения в шестой передней боковой области. Когда направление движения шестого объекта совпадает с направлением движения транспортного средства, получают третье расстояние до столкновения. Третье расстояние до столкновения - это расстояние между шестым объектом и транспортным средством. Определяют, больше ли третье расстояние до столкновения соответствующего порогового значения третьего расстояние до столкновения, и больше ли шестое расстояние соответствующего порогового значения шестого расстояния, соответственно. Когда третье расстояние до столкновения больше соответствующего порогового значения третьего расстояния столкновения, а шестое расстояние больше соответствующего порогового значения шестого расстояния, определяют, что нет риска столкновения в шестой передней боковой области.
[0124] Шестая целевая разделительная линия относится к разделительной линии между транспортным средством и шестой передней боковой областью, то есть разделительной линии между полосой движения, на которой располагается транспортное средство, и полосой движения, соответствующей шестой передней боковой области.
[0125] Следует понимать, что вышеприведенное определение шестой передней боковой области как области сбоку перед транспортным средством в соседней полосе движения справа от транспортного средства предназначено только для различения шестой передней боковой области от пятой передней боковой области. На практике, когда пятая передняя боковая область является областью сбоку перед транспортным средством на соседней полосе справа от транспортного средства, шестая передняя боковая область является областью сбоку перед транспортным средством в соседней полосе слева от транспортного средства.
[0126] В описанном выше процессе определения, необходимо ли формировать команду коррекции расстояния, если включены противотуманные фары или ближний свет транспортного средства, переключатель стеклоочистителя находится на максимальной передаче или радиус кривизны дороги меньше заранее заданного радиуса, во избежание опасности формировать команду коррекции расстояния не требуется.
[0127] В этой форме осуществления изобретения, когда транспортному средству необходимо обогнать пятый объект в пятой передней боковой области, определяют в соответствии с параметрами движения транспортного средства, информацией о характеристиках пятого объекта и относительной информацией между транспортным средством и пятым объектом, существует ли опасность столкновения транспортного средства с пятым объектом. Если существует риск столкновения, транспортное средство управляют таким образом, что оно перемещается вбок на определенное расстояние в направлении от пятой передней боковой области, таким образом эффективно избегая столкновений.
[0128] Фиг. 5 представляет собой структурную схему устройства управления движением транспортного средства согласно форме осуществления настоящего изобретения. Как показано на фиг. 5, устройство 50 управления движением транспортного средства содержит: модуль 501 сбора информации, модуль 502 обработки информации и модуль 503 управления движением.
[0129] Модуль 501 сбора информации сконфигурирован для получения параметров движения транспортного средства, информации о характеристиках объекта в передней боковой области транспортного средства и относительной информации между объектом и транспортным средством. Относительная информация включает в себя относительное поперечное расстояние между объектом и транспортным средством.
[0130] Модуль 502 обработки информации сконфигурирован для определения, следует ли формировать команды коррекции параметров в соответствии с параметрами движения, информацией о характеристиках объекта и относительной информацией при различных условиях движения. Команды коррекции параметров включают в себя команду коррекции расстояния и/или команду коррекции скорости. Условия движения включают в себя первое условие, когда между транспортным средством и соседней полосой движения нет разделительной полосы, второе условие, когда объект на соседней полосе движения входит в область прямо перед транспортным средством, и/или третье условие, когда транспортному средству требуется обогнать объект на соседней полосе движения.
[0131] Модуль 503 управления движением сконфигурирован для коррекции относительного поперечного расстояния между транспортным средством и объектом согласно команде коррекции расстояния и/или для коррекции скорости движения транспортного средства согласно команде коррекции скорости в ответ на формирование команд коррекции параметров.
[0132] В возможном окружении информация об объекте включает расстояние между объектом и целевой разделительной линией. Целевая разделительная линия - это разделительная линия дорожной разметки между объектом и транспортным средством. Относительная информация включает в себя относительную продольную скорость между транспортным средством и объектом. Параметры движения включают в себя направление движения транспортного средства.
[0133] В возможном окружении передняя боковая область включает в себя первую переднюю боковую область. Первая передняя боковая область представляет собой боковую область перед транспортным средством на соседней полосе движения в первом направлении от транспортного средства.
[0134] Модуль обработки информации специально сконфигурирован для получения первого прогнозируемого времени до столкновения, когда нет разделительной полосы между транспортным средством и первой передней боковой областью. Первое прогнозируемое время до столкновения относится ко времени, когда транспортное средство столкнется с первым объектом в первой передней боковой области.
[0135] Модуль обработки информации дополнительно сконфигурирован для определения, удовлетворяется ли по меньшей мере одно из следующих первых пороговых условий оценки:
первая относительная продольная скорость между первым объектом в первой передней боковой области и транспортным средством превышает заранее заданное пороговое значение для первой скорости;
первое расстояние между первым объектом и первой целевой разделительной линией меньше заранее заданного порогового значения для первого расстояния; и
первое прогнозируемое время до столкновения меньше заранее заданного порогового значения для первого времени.
[0136] Модуль обработки информации дополнительно сконфигурирован так, чтобы определять необходимость формирования команды коррекции расстояния и команды коррекции скорости в ответ на удовлетворение по меньшей мере одного из первых пороговых условий оценки.
[0137] В возможном окружении передняя боковая область включает в себя вторую переднюю боковую область. Вторая передняя боковая область представляет собой боковую область перед транспортным средством на соседней полосе движения в первом направлении от транспортного средства.
[0138] Модуль обработки информации специально сконфигурирован для получения первого прогнозируемого времени поперечного сближения до столкновения и первого прогнозируемого времени продольного сближения до столкновения в ответ на обнаружение того, что второй объект во второй передней боковой области входит в область прямо перед транспортным средством.
[0139] Модуль обработки информации дополнительно сконфигурирован так, чтобы определять, удовлетворяется ли по меньшей мере одно из следующих вторых пороговых условий оценки:
вторая относительная продольная скорость между вторым объектом во второй передней боковой области и транспортным средством превышает заранее заданное пороговое значение для второй скорости;
первое прогнозируемое время поперечного сближения до столкновения меньше заранее заданного порогового значения для первого времени поперечного сближения до столкновения; и
первое прогнозируемое время продольного сближения до столкновения меньше заранее заданного порогового значения для первого времени продольного сближения.
[0140] Модуль обработки информации дополнительно сконфигурирован для формирования команды коррекции расстояния и команды коррекции скорости в ответ на удовлетворение по меньшей мере одного из вторых пороговых условий оценки.
[0141] В возможном окружении передняя боковая область включает в себя также третью переднюю боковую область. Третья передняя боковая область представляет собой боковую область перед транспортным средством на соседней полосе движения во втором направлении от транспортного средства. Первое направление от транспортного средства отличается от второго направления от транспортного средства.
[0142] Модуль обработки информации дополнительно сконфигурирован для определения, удовлетворяется ли по меньшей мере одно из следующих первых условий пороговой оценки:
первая относительная продольная скорость между первым объектом в первой передней боковой области и транспортным средством превышает заранее заданное пороговое значение для первой скорости;
первое расстояние между первым объектом и первой целевой разделительной линией меньше заранее заданного порогового значения для первого расстояния;
первое прогнозируемое время до столкновения меньше заранее заданного порогового значения для первого времени; и
риск столкновения в третьей передней боковой области отсутствует.
[0143] Модуль обработки информации дополнительно сконфигурирован для определения необходимости формирования команды коррекции расстояния и команды коррекции скорости в ответ на удовлетворение по меньшей мере одного из первых пороговых условий оценки.
[0144] В возможном исполнении модуль обработки информации дополнительно сконфигурирован для обнаружения, имеется ли третий объект в третьей передней боковой области.
[0145] Модуль обработки информации дополнительно сконфигурирован для получения направления движения третьего объекта и получения второго расстояния между третьим объектом и второй целевой разделительной линией, если третий объект имеется в третьей передней боковой области.
[0146] Модуль обработки информации дополнительно сконфигурирован для определения, превышает ли второе расстояние заранее заданное пороговое значение для второго расстояния, если направление движения третьего объекта противоположно направлению движения транспортного средства; и для определения отсутствия риска столкновения в третьей передней боковой области, если второе расстояние больше порогового значения второго расстояния.
[0147] В возможном исполнении модуль обработки информации дополнительно сконфигурирован для: после получения направления движения третьего объекта и получения второго расстояния между третьим объектом и второй целевой разделительной линией, получения первого расстояния до столкновения, если направление движения третьего объекта совпадает с направлением движения транспортного средства. Первое расстояние до столкновения - это расстояние между третьим объектом и транспортным средством. Модуль обработки информации дополнительно сконфигурирован для определения, превышает ли первое расстояние до столкновения пороговое значение первого расстояния до столкновения и превышает ли второе расстояние пороговое значение второго расстояния.
[0148] Модуль обработки информации дополнительно сконфигурирован для определения отсутствия риска столкновения в третьей передней боковой области, если первое расстояние до столкновения больше порогового значения первого расстояния до столкновения, а второе расстояние больше порогового значения второго расстояния.
[0149] В возможном исполнении модуль сбора информации специально сконфигурирован для приема параметров движения, передаваемого датчиком на транспортном средстве, информации о характеристиках объекта, передаваемой камерой на транспортном средстве, и относительной информации, передаваемой радиолокационной системой на транспортном средстве, соответственно.
[0150] Устройство согласно этой форме осуществления изобретения может использоваться для реализации технических решений вышеописанных форм осуществления способа, и его принципы реализации и технические эффекты аналогичны и не будут повторяться здесь в этой форме осуществления изобретения.
[0151] Фиг. 6 представляет собой схему аппаратной структуры устройства управления движением транспортного средства согласно форме осуществления настоящего изобретения. Как показано на фиг. 6, устройство 60 управления движением транспортного средства согласно форме осуществления изобретения содержит датчик 61, камеру 62, радиолокационную систему 63 и контроллер 64.
[0152] Датчик 61 сконфигурирован для сбора параметров движения транспортного средства.
[0153] Камера 62 сконфигурирована для сбора информации о характеристиках объекта в передней боковой области транспортного средства.
[0154] Радиолокационная система 63 сконфигурирована для сбора относительной информации между объектом и транспортным средством.
[0155] Контроллер 64 содержит память и процессор. В памяти хранится компьютерная программа, и эта программа, когда она выполняется процессором, реализует этапы, выполняемые принимающим устройством в вышеописанных формах осуществления изобретения. Для получения подробной информации можно сделать ссылку на соответствующее описание в вышеописанных формах осуществления способа.
[0156] Радиолокационная система содержит радиолокатор переднего обзора, радиолокатор первого переднего угла обзора и радиолокатор второго переднего угла обзора.
[0157] Радиолокатор переднего обзора установлен на передней противоударной балке транспортного средства, а радиолокатор первого переднего угла обзора и радиолокатор второго переднего угла обзора соответственно установлены на левой и правой сторонах переднего бампера транспортного средства.
[0158] Радиолокационная система содержит также радиолокатор первого заднего угла обзора и радиолокатор второго заднего угла обзора.
[0159] Радиолокатор первого заднего угла обзора и радиолокатор второго заднего угла обзора установлены соответственно на левой и правой сторонах заднего бампера транспортного средства.
[0160] Машиночитаемый носитель данных также предлагается в форме осуществления настоящего изобретения. Машиночитаемый носитель данных хранит исполняемые компьютером команды. Процессор при выполнении исполняемых компьютером команд реализует способ управления движением транспортного средства, описанный выше.
[0161] Следует понимать, что в нескольких формах осуществления, предлагаемых настоящим изобретением, раскрываемые устройство и способ могут быть реализованы другими путями. Например, описанные выше формы осуществления устройства являются только иллюстративными. Модули делятся просто на основе логической функции, и в фактической реализации могут быть другие подразделения. Несколько модулей могут быть объединены или могут быть интегрированы в другую систему, или некоторые функции могут быть опущены или могут не выполняться. Кроме того, отображаемая или обсуждаемая взаимная связь, или прямая связь, или коммуникационное соединение может осуществляться через некоторые интерфейсы, а косвенная связь или коммуникационное соединение между устройствами или модулями может быть в электрической, механической или других формах.
[0162] Модули, описанные как отдельные компоненты, могут быть или не быть физически разделены, а компоненты, отображаемые как модули, могут быть или не быть физическими единицами, то есть они могут быть расположены в одном месте или могут быть распределены по нескольким сетевым модулям. Некоторые или все модули могут быть выбраны в соответствии с фактическими потребностями для достижения целей решений форм осуществления изобретения.
[0163] Кроме того, функциональные модули в различных формах осуществления настоящего изобретения могут быть интегрированы в один блок обработки, или каждый модуль может существовать отдельно физически, или два или более модулей могут быть объединены в один блок. Блоки, образованные вышеупомянутыми модулями, могут быть реализованы в виде аппаратных средств или в виде функциональных блоков из аппаратных средств и программного обеспечения.
[0164] Вышеупомянутый интегрированный модуль, реализованный в форме программного функционального модуля, может храниться на машиночитаемом носителе данных. Вышеупомянутый программный функциональный модуль хранится на носителе данных, включающем несколько команд, чтобы компьютерное устройство или процессор выполняли часть этапов способа согласно различным формам осуществления настоящего изобретения. Компьютерное устройство может быть персональным компьютером, сервером, сетевым устройством и тому подобным.
[0165] Следует понимать, что вышеупомянутый процессор может быть центральным процессором (CPU, Central Processing Unit) или другим процессором общего назначения, процессором цифровых сигналов (DSP, Digital Signal Processor), специализированной интегральной схемой (ASIC Application Specific Integrated Circuit) и т.п. Универсальный процессор может быть микропроцессором, или процессор также может быть любым обычным процессором. Этапы способа, раскрываемого в настоящем изобретении, могут быть непосредственно реализованы как выполняемые аппаратным процессором или выполняемые комбинацией аппаратных и программных модулей в процессоре.
[0166] Память может включать в себя высокоскоростную оперативную память (RAM, Random Access Memory,) или может также включать в себя энергонезависимую память (NVM, Non-Volatile Storage) (например, по меньшей мере одно запоминающее устройство на дисках), а также может быть U-диском, внешним жестким диском, постоянным запоминающим устройством, магнитным диском или оптическим диском.
[0167] Шина может быть шиной промышленной стандартной архитектуры (ISA, Industry Standard Architecture), шиной для подключения периферийных компонентов (PCI, Peripheral Component Interconnection), шиной расширенной промышленной стандартной архитектуры (EISA, Extended Industry standard Architecture) и т.п. Шину можно разделить на адресную шину, шину данных, шину управления и так далее. Для простоты представления шина на чертежах настоящего изобретения не ограничивается только одной шиной или шиной только одного типа.
[0168] Вышеупомянутый носитель данных может быть реализован в виде энергозависимого или энергонезависимого запоминающего устройства любого типа или их комбинации, такой как статическая память с произвольным доступом (SRAM, Static Random Access Memory), электрически стираемая программируемая постоянная память (EEPROM, Electrically Erasable Programmable Read-Only Memory), стираемая программируемая постоянная память (EPROM, Erasable Programmable Read-Only Memory), программируемое постоянное запоминающее устройство (PROM, Programmable Read-Only Memory), постоянное запоминающее устройство (ROM, Readonly Memory), магнитная память, флэш-память, магнитный диск или оптический диск. Носитель данных может быть любым доступным носителем, к которому может получить доступ универсальный или специализированный компьютер.
[0169] Приводимый в качестве примера носитель данных подключен к процессору, так что процессор может считывать информацию с носителя данных, и может записывать информацию на носитель данных. Носитель данных также может быть частью процессора. Процессор и носитель данных могут быть расположены в специализированной интегральной схеме (ASIC, Application Specific Integrated Circuit). Процессор и носитель данных могут существовать также как дискретные компоненты в электронном устройстве или главном управляющем устройстве.
[0170] Специалисты средней квалификации в данной области техники могут понять, что все или часть этапов в вышеупомянутых формах осуществления способа могут быть реализованы программой, выдающей команды соответствующим аппаратным средствам. Программа может храниться на машиночитаемом носителе данных. Программа при исполнении выполняет этапы описанных выше форм осуществления способа. Носитель данных включает в себя: ROM, RAM, магнитный диск или оптический диск и другой носитель, на котором могут храниться программные коды.
[0171] Наконец, следует отметить, что вышеописанные формы осуществления изобретения используются только для иллюстрации технических решений настоящего изобретения и не используются для его ограничения. Хотя настоящее изобретение было подробно описано со ссылкой на вышеописанные формы осуществления, специалисты средней квалификации в данной области техники должны понимать, что технические решения, раскрытые в вышеописанных формах осуществления изобретения, могут быть модифицированы, или некоторые или все технические характеристики могут быть эквивалентно заменены; и эти модификации или замены не отклоняют сущность соответствующих технических решений от объема технических решений форм осуществления настоящего изобретения.
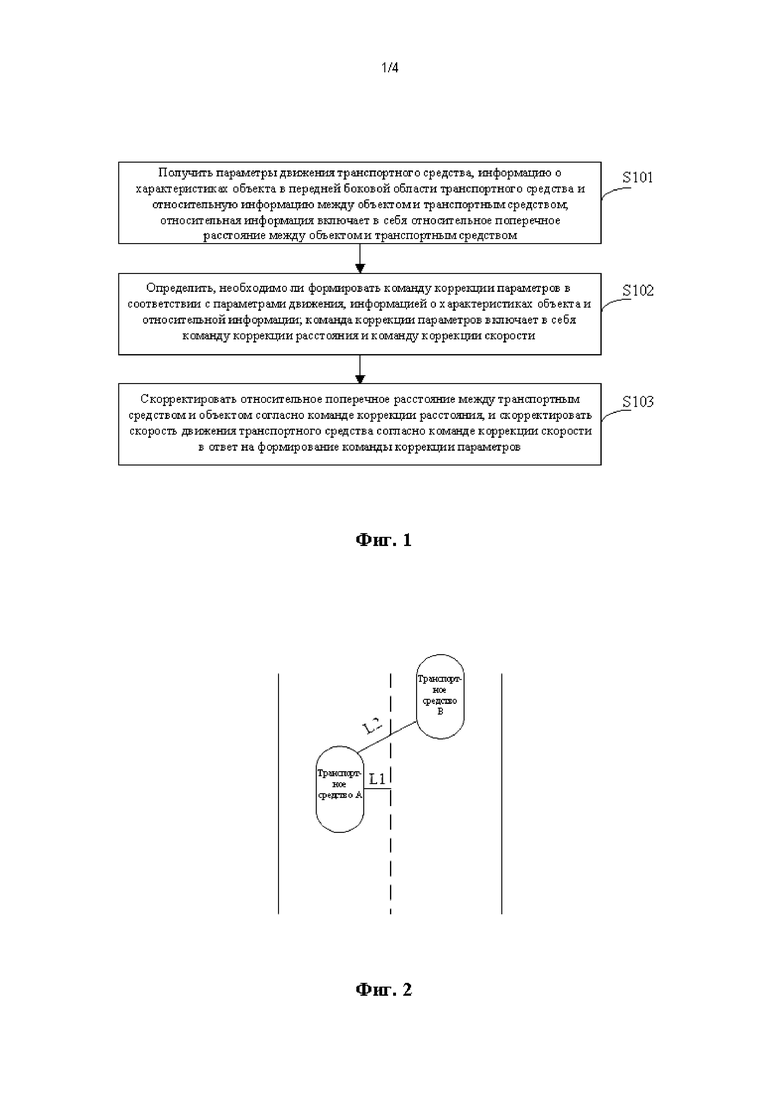
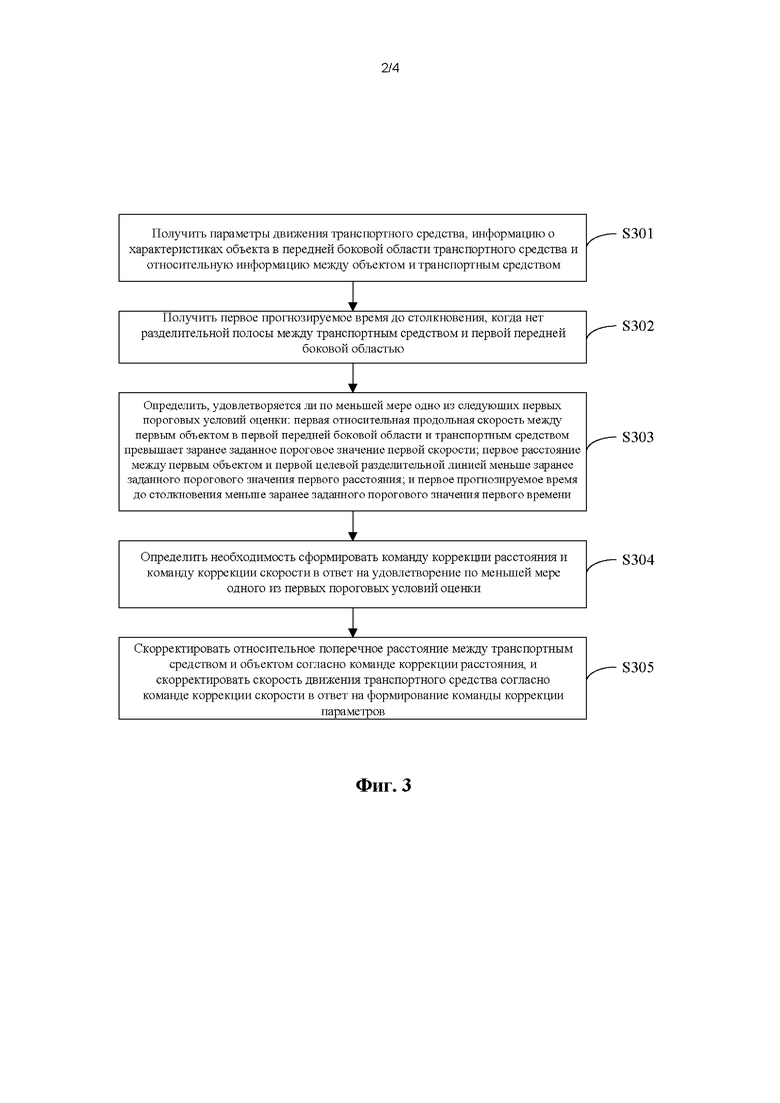
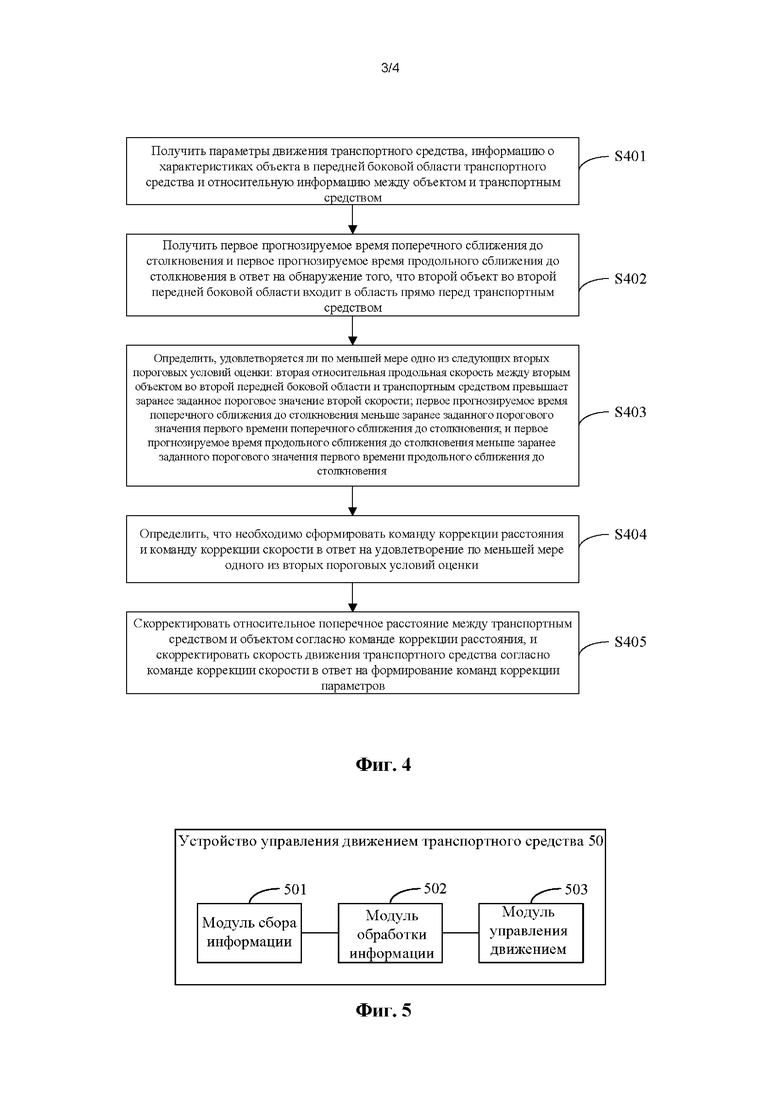
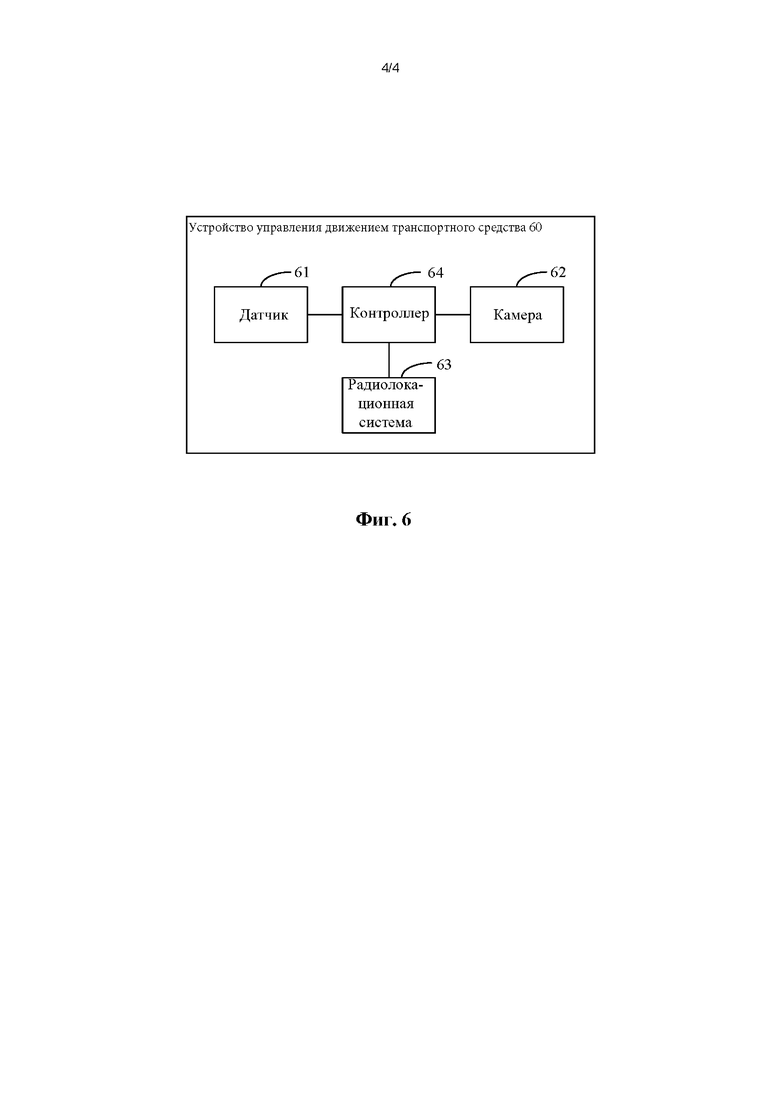
Изобретение относится к области техники управления транспортным средством. Способ управления движением транспортного средства содержит этап получения параметров движения транспортного средства, информации о характеристиках объекта в передней боковой области транспортного средства и относительной информации между объектом и транспортным средством, определения, следует ли формировать команду коррекции параметров в соответствии с параметрами движения, информацией о характеристиках объекта и относительной информацией при различных условиях движения. Команда коррекции параметров содержит команду коррекции расстояния и/или команду коррекции скорости, при этом условия движения содержат первое условие, когда нет разделительной полосы между транспортным средством и соседней полосой движения, второе условие, когда объект на соседней полосе движения входит в область прямо перед транспортным средством, и/или третье условие, когда транспортному средству необходимо обогнать объект на соседней полосе движения. Также способ содержит этап коррекции относительного поперечного расстояния между транспортным средством и объектом согласно команде коррекции расстояния и/или коррекции скорости движения транспортного средства согласно команде коррекции скорости в ответ на формирование команды коррекции параметров. Достигается повышение безопасности. 4 н. и 14 з.п. ф-лы, 6 ил.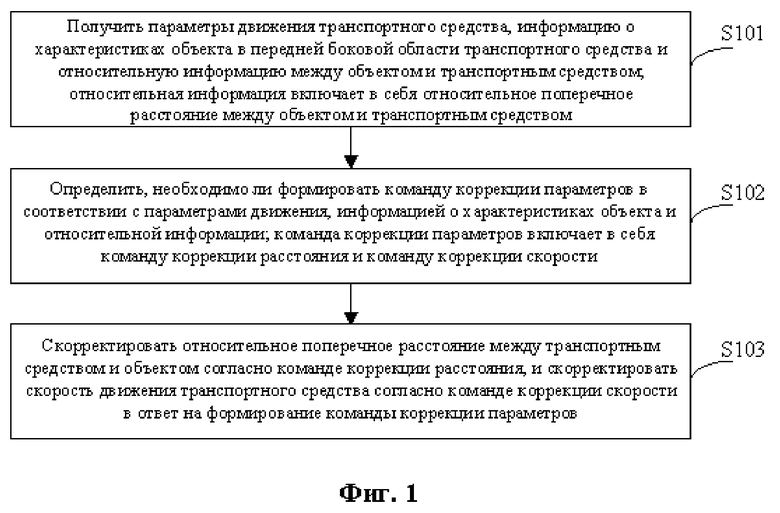
1. Способ управления движением транспортного средства, отличающийся тем, что способ содержит:
получение параметров движения транспортного средства, информации о характеристиках объекта в передней боковой области транспортного средства и относительной информации между объектом и транспортным средством, при этом относительная информация содержит относительное боковое расстояние между объектом и транспортным средством;
определение, следует ли формировать команду коррекции параметров в соответствии с параметрами движения, информацией о характеристиках объекта и относительной информацией при различных условиях движения, при этом команда коррекции параметров содержит команду коррекции расстояния и/или команду коррекции скорости, при этом условия движения содержат первое условие, когда нет разделительной полосы между транспортным средством и соседней полосой движения, второе условие, когда объект на соседней полосе движения входит в область прямо перед транспортным средством, и/или третье условие, когда транспортному средству необходимо обогнать объект на соседней полосе движения; и
коррекцию относительного поперечного расстояния между транспортным средством и объектом согласно команде коррекции расстояния и/или коррекцию скорости движения транспортного средства согласно команде коррекции скорости в ответ на формирование команды коррекции параметров.
2. Способ по п. 1, в котором информация о характеристиках объекта содержит расстояние между объектом и целевой разделительной линией дорожной разметки, при этом целевая разделительная линия является разделительной линией между объектом и транспортным средством, относительная информация содержит относительную продольную скорость между транспортным средством и объектом, и параметр движения содержит направление движения транспортного средства.
3. Способ по п. 2, в котором передняя боковая область содержит первую переднюю боковую область, при этом первая передняя боковая область представляет собой область сбоку перед транспортным средством и расположена на соседней полосе движения в первом направлении от транспортного средства, определение, следует ли формировать команду коррекции параметров в соответствии с параметрами движения, информацией о характеристиках объекта и относительной информацией, содержит:
получение первого прогнозируемого времени до столкновения, когда нет разделительной полосы между транспортным средством и первой передней боковой областью, при этом первое прогнозируемое время до столкновения относится ко времени, когда транспортное средство столкнется с первым объектом в первой передней боковой области;
определение, удовлетворяется ли по меньшей мере одно из следующих первых пороговых условий оценки:
первая относительная продольная скорость между первым объектом в первой передней боковой области и транспортным средством превышает заранее заданное пороговое значение для первой скорости;
первое расстояние между первым объектом и первой целевой разделительной линией меньше заранее заданного порогового значения для первого расстояния и
первое прогнозируемое время до столкновения меньше заранее заданного порогового значения для первого времени;
и
определение необходимости формировать команду коррекции расстояния и команду коррекции скорости в ответ на удовлетворение по меньшей мере одного из первых пороговых условий оценки.
4. Способ по п. 3, в котором передняя боковая область дополнительно содержит третью переднюю боковую область, при этом третья передняя боковая область является областью сбоку перед транспортным средством и расположена на соседней полосе движения во втором направлении от транспортного средства, первое направление от транспортного средства отличается от второго направления от транспортного средства;
первые пороговые условия оценки дополнительно содержат отсутствие риска столкновения в третьей передней боковой области;
определение, следует ли формировать команду коррекции параметров в соответствии с параметрами движения, информацией о характеристиках объекта и относительной информацией, содержит:
определение, удовлетворяется ли по меньшей мере одно из следующих первых пороговых условий оценки:
первая относительная продольная скорость между первым объектом в первой передней боковой области и транспортным средством превышает заранее заданное пороговое значение для первой скорости;
первое расстояние между первым объектом и первой разделительной линией меньше заранее заданного порогового значения для первого расстояния;
первое прогнозируемое время до столкновения меньше заранее заданного порогового значения для первого времени; и
отсутствует риск столкновения в третьей боковой передней области;
и
определение необходимости формировать команду коррекции расстояния и команду коррекции скорости в ответ на удовлетворение по меньшей мере одного из первых пороговых условий оценки.
5. Способ по п. 4, в котором определение наличия риска столкновения в третьей передней боковой области содержит:
обнаружение, имеется ли третий объект в третьей передней боковой области;
получение направления движения третьего объекта и получение второго расстояния между третьим объектом и второй целевой разделительной линией, если третий объект находится в третьей передней боковой области;
определение, больше ли второе расстояние, чем заранее заданное пороговое значение для второго расстояния, если направление движения третьего объекта противоположно направлению движения транспортного средства; и
определение, что риск столкновения в третьей передней боковой области отсутствует, если второе расстояние больше порогового значения для второго расстояния.
6. Способ по п. 5, в котором после получения направления движения третьего объекта и получения второго расстояния между третьим объектом и второй целевой разделительной линией способ дополнительно содержит:
получение первого расстояния до столкновения, если направление движения третьего объекта совпадает с направлением движения транспортного средства, при этом первое расстояние до столкновения - это расстояние между третьим объектом и транспортным средством;
определение, превышает ли первое расстояние до столкновения пороговое значение для первого расстояния до столкновения и превышает ли второе расстояние пороговое значение для второго расстояния;
определение, что риск столкновения в третьей передней боковой области отсутствует, если первое расстояние до столкновения больше порогового значения для первого расстояния до столкновения, а второе расстояние больше порогового значения для второго расстояния.
7. Способ по п. 2, в котором передняя боковая область содержит вторую переднюю боковую область, при этом вторая передняя боковая область является областью сбоку перед транспортным средством и расположена на соседней полосе движения в первом направлении от транспортного средства,
определение, следует ли формировать команду коррекции параметров в соответствии с параметрами движения, информацией о характеристиках объекта и относительной информацией, содержит:
получение первого прогнозируемого времени поперечного сближения до столкновения и первого прогнозируемого времени продольного сближения до столкновения в ответ на обнаружение того, что второй объект во второй передней боковой области входит в область прямо перед транспортным средством;
определение, удовлетворяется ли по меньшей мере одно из следующих вторых пороговых условий оценки:
вторая относительная продольная скорость между вторым объектом во второй передней боковой области и транспортным средством превышает заранее заданное пороговое значение для второй скорости;
первое прогнозируемое время поперечного сближения до столкновения меньше заранее заданного порогового значения для первого времени поперечного сближения и
первое прогнозируемое время продольного сближения до столкновения меньше заранее заданного порогового значения для первого времени продольного сближения до столкновения;
и
определение необходимости формировать команду коррекции расстояния и команду коррекции скорости в ответ на удовлетворение по меньшей мере одного из вторых пороговых условий оценки.
8. Способ по п. 7, в котором передняя боковая область дополнительно содержит четвертую переднюю боковую область, при этом четвертая передняя боковая область является областью сбоку перед транспортным средством и расположена в соседней полосе движения во втором направлении от транспортного средства, при этом первое направление от транспортного средства отличается от второго направления от транспортного средства;
вторые пороговые условия оценки дополнительно содержат отсутствие риска столкновения в четвертой передней боковой области;
определение, следует ли формировать команду коррекции параметров в соответствии с параметрами движения, информацией о характеристиках объекта и относительной информацией, содержит:
определение, удовлетворяется ли по меньшей мере одно из следующих вторых пороговых условий оценки:
вторая относительная продольная скорость между вторым объектом во второй передней боковой области и транспортным средством превышает заранее заданное пороговое значение для второй скорости;
первое прогнозируемое время до столкновения меньше заранее заданного порогового значения для первого времени;
первое прогнозируемое время продольного сближения до столкновения меньше заранее заданного порогового значения для первого времени продольного сближения до столкновения; и
отсутствует риск столкновения в четвертой передней боковой области;
и
определение необходимости формировать команду коррекции расстояния и команду коррекции скорости в ответ на удовлетворение по меньшей мере одного из вторых пороговых условий оценки.
9. Способ по п. 8, в котором определение наличия риска столкновения в четвертой передней боковой области содержит:
обнаружение, имеется ли четвертый объект в четвертой передней боковой области;
получение направления движения четвертого объекта и получение четвертого расстояния между четвертым объектом и четвертой целевой разделительной линией, если четвертый объект находится в четвертой передней боковой области;
определение, превышает ли четвертое расстояние заранее заданное пороговое значение для четвертого расстояния, если направление движения четвертого объекта противоположно направлению движения транспортного средства; и
определение, что риск столкновения в четвертой передней боковой области отсутствует, если четвертое расстояние больше порогового значения для четвертого расстояния.
10. Способ по п. 9, в котором после получения направления движения четвертого объекта и определения четвертого расстояния между четвертым объектом и четвертой целевой разделительной линией способ дополнительно содержит:
получение второго расстояния до столкновения, если направление движения четвертого объекта совпадает с направлением движения транспортного средства, при этом второе расстояние до столкновения - это расстояние между четвертым объектом и транспортным средством;
определение, больше ли второе расстояние до столкновения, чем пороговое значение для второго расстояния до столкновения, и больше ли четвертое расстояние, чем пороговое значение для четвертого расстояния;
определение, что риск столкновения в третьей передней боковой области отсутствует, если второе расстояние до столкновения больше порогового значения для второго расстояния до столкновения и четвертое расстояние больше порогового значения для четвертого расстояния.
11. Способ по п. 2, в котором передняя боковая область содержит первую переднюю боковую область и пятую переднюю боковую область, и пятая передняя боковая область представляет собой область сбоку перед транспортным средством и расположена в соседней полосе движения в первом направлении от транспортного средства,
определение, следует ли формировать команду коррекции параметров в соответствии с параметрами движения, информацией о характеристиках объекта и относительной информацией, содержит:
получение второго прогнозируемого времени до столкновения, когда транспортному средству необходимо обогнать пятый объект в пятой боковой области перед транспортным средством, при этом второе прогнозируемое время до столкновения - это время, когда транспортное средство столкнется с пятым объектом;
определение, удовлетворяется ли по меньшей мере одно из следующих третьих пороговых условий оценки:
третья относительная продольная скорость между пятым объектом и транспортным средством превышает заранее заданное пороговое значение для третьей скорости;
пятое расстояние между пятым объектом и пятой целевой разделительной линией меньше заранее заданного порогового значения для пятого расстояния и
второе прогнозируемое время до столкновения меньше заранее заданного порогового значения для второго времени;
и
определение необходимости формирования команды коррекции расстояния в ответ на удовлетворение по меньшей мере одного из третьих пороговых условий оценки.
12. Способ по п. 11, в котором передняя боковая область дополнительно содержит шестую переднюю боковую область, при этом шестая передняя боковая область является областью сбоку перед транспортным средством и расположена на соседней полосе движения во втором направлении от транспортного средства, и первое направление от транспортного средства отличается от второго направления от транспортного средства,
третьи пороговые условия оценки дополнительно содержат отсутствие риска столкновения в шестой передней боковой области;
определение, следует ли формировать команду коррекции параметров в соответствии с параметрами движения, информацией о характеристиках пятого объекта и относительной информацией, содержит:
определение, удовлетворяется ли по меньшей мере одно из следующих третьих пороговых условий оценки:
третья относительная продольная скорость между пятым объектом и транспортным средством превышает заранее заданное пороговое значение для третьей скорости;
пятое расстояние между пятым объектом и пятой целевой разделительной линией меньше заранее заданного порогового значения для пятого расстояния;
второе прогнозируемое время до столкновения меньше заранее заданного порогового значения для второго времени; и
отсутствует риск столкновения во второй передней боковой области;
и
определение необходимости формировать команду коррекции расстояния в ответ на удовлетворение по меньшей мере одного из третьих пороговых условий оценки.
13. Способ по п. 12, в котором определение наличия риска столкновения в шестой передней боковой области содержит:
обнаружение, имеется ли шестой объект в шестой передней боковой области;
получение направления движения шестого объекта и получение шестого расстояния между шестым объектом и шестой целевой разделительной линией, если шестой объект находится в шестой передней боковой области;
определение, превышает ли шестое расстояние заранее заданное пороговое значение для шестого расстояния, если направление движения шестого объекта противоположно направлению движения транспортного средства; и
определение, что риск столкновения в шестой передней боковой области отсутствует, если шестое расстояние больше порогового значения для шестого расстояния.
14. Способ по п. 13, в котором после получения направления движения шестого объекта и получения шестого расстояния между шестым объектом и шестой целевой разделительной линией способ дополнительно содержит:
получение третьего расстояния до столкновения, если направление движения шестого объекта совпадает с направлением движения транспортного средства, при этом третье расстояние до столкновения - это расстояние между шестым объектом и транспортным средством;
определение, превышает ли третье расстояние до столкновения пороговое значение для третьего расстояния до столкновения и превышает ли шестое расстояние пороговое значение для шестого расстояния; и
определение, что риск столкновения в шестой передней боковой области отсутствует, если третье расстояние до столкновения больше порогового значения для третьего расстояния до столкновения и шестое расстояние больше порогового значения для шестого расстояния.
15. Устройство для управления движением транспортного средства, отличающееся тем, что устройство содержит:
модуль получения информации, сконфигурированный для получения параметров движения транспортного средства, информации о характеристиках объекта в передней боковой области транспортного средства и относительной информации между объектом и транспортным средством, при этом относительная информация содержит относительное поперечное расстояние между объектом и транспортным средством;
модуль обработки информации, сконфигурированный для определения, следует ли формировать команду коррекции параметров в соответствии с параметрами движения, информацией о характеристиках объекта и относительной информацией при различных условиях движения, при этом команда коррекции параметров содержит команду коррекции расстояния и/или команду коррекции скорости, при этом условия движения включают первое условие, когда нет разделительной полосы между транспортным средством и соседней полосой движения, второе условие, когда объект на соседней полосе движения входит в область прямо перед транспортным средством, и/или третье условие, когда транспортному средству необходимо обогнать объект на соседней полосе движения; и
модуль управления движением, сконфигурированный для коррекции относительного поперечного расстояния между транспортным средством и объектом согласно команде коррекции расстояния и/или для коррекции скорости движения транспортного средства согласно команде коррекции скорости, в ответ на формирование команды коррекции параметров.
16. Устройство для управления движением транспортного средства, отличающееся тем, что устройство содержит:
датчик, сконфигурированный для сбора параметров движения транспортного средства;
камеру, сконфигурированную для сбора информации о характеристиках объекта в передней боковой области транспортного средства;
радиолокационную систему, сконфигурированную для сбора относительной информации между объектом и транспортным средством; и
контроллер, содержащий память и процессор, при этом память хранит компьютерную программу, которая при исполнении процессором обеспечивает выполнение способа управления движением транспортного средства по любому из пп. 1-14.
17. Устройство по п. 16, в котором радиолокационная система содержит радиолокатор переднего обзора, радиолокатор первого переднего угла обзора и радиолокатор второго переднего угла обзора;
радиолокатор переднего обзора установлен на передней противоударной балке транспортного средства, а радиолокатор первого переднего угла обзора и радиолокатор второго переднего угла обзора соответственно установлены на левой и правой сторонах переднего бампера транспортного средства.
18. Машиночитаемый носитель данных, на котором хранятся исполняемые компьютером команды, при этом процессор при выполнении исполняемых компьютером команд реализует способ управления движением транспортного средства по любому из пп. 1-14.
| WO 2018110607 A1, 21.06.2018 | |||
| US 10035506 B2, 31.07.2018 | |||
| CN 103895644 B, 04.01.2019 | |||
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ | 2015 |
|
RU2688553C1 |

