Область техники, к которой относится изобретение
Изобретение относится к способу вычисления бокового положения автотранспортного средства, в частности, автономного транспортного средства. Изобретение относится также к автотранспортному средству, в частности, автономному транспортному средству, содержащему средства для осуществления такого способа вычисления бокового положения.
Уровень техники
Автономные транспортные средства оснащены средствами отслеживания окружающей среды транспортного средства и сервоуправляемым рулевым устройством. В частности, средства отслеживания выполнены с возможностью идентифицировать полосу движения, на которой находится транспортное средство. Вычислительное устройство, соединенное одновременно со средствами отслеживания и с рулевым устройством, может управлять рулевым устройством таким образом, чтобы транспортное средство держалось в центре полосы движения. В этой связи известны системы обеспечения центровки на полосе, называемые также английским выражением “Lane Centering Assist” или LCA. Такие системы регламентируются предписаниями, представленными в регламенте №R79 Европейской экономической комиссии ООН.
Однако известные системы обеспечения центровки на полосе не позиционируют автономное транспортное средство естественным образом. Боковое положение транспортного средства на полосе движения не соответствует положению, которое выбрал бы водитель, если бы он мог сам контролировать рулевое устройство. Таким образом, автономное транспортное средство не сливается с потоком движения, и могут увеличиться риски столкновения с другими транспортными средствами или объектами. В частности, известные системы обеспечения центровки на полосе не позволяют оптимизировать безопасные боковые расстояния с другими транспортными средствами или препятствиями. В ситуации дорожной пробки известные системы не позволяют также сместить транспортное средство в боковом направлении, чтобы оставить достаточно места для мотоцикла или спецтранспорта, которые проезжают вдоль ряда транспортных средств.
Описание изобретения
Изобретение призвано предложить способ вычисления бокового положения автотранспортного средства, позволяющий преодолеть вышеупомянутые недостатки и усовершенствующий известные способы.
В частности, первым объектом изобретения является способ, позволяющий вычислять боковое положение транспортного средства, которое является надежным и безопасным.
Вторым объектом изобретения является решение, представляющее собой способ, позволяющий вычислять боковое положение транспортного средства, которое облегчает движение других пользователей дороги.
Раскрытие сущности изобретения
Изобретение относится к способу вычисления бокового положения данного автотранспортного средства на полосе движения, при этом способ содержит:
- первый этап вычисления первого теоретического бокового положения данного транспортного средства на указанной полосе движения в зависимости от бокового положения на указанной полосе движения транспортных средств, находящихся спереди данного транспортного средства, и/или транспортных средств, следующих сзади данного транспортного средства, и/или
- второй этап вычисления второго теоретического бокового положения данного транспортного средства на указанной полосе движения в зависимости от положения транспортных средств на полосах движения, смежных с указанной полосой движения,
- третий этап вычисления третьего теоретического бокового положения данного транспортного средства на указанной полосе движения в зависимости от статичных препятствий, обнаруживаемых на боковых сторонах указанной полосы движения,
- четвертый этап вычисления бокового положения данного транспортного средства при помощи средневзвешенного первого бокового положения, второго бокового положения и третьего бокового положения.
Первый этап вычисления может содержать подэтап вычисления средневзвешенного боковых положений предшествующих транспортных средств и/или транспортных средств, следующих сзади на указанной полосе движения, при этом весовые коэффициенты каждого бокового положения являются функцией продольного расстояния, отделяющего данное транспортное средство от рассматриваемого транспортного средства спереди и/или от рассматриваемого транспортного средства сзади, и функцией скорости рассматриваемого предшествующего транспортного средства и/или рассматриваемого следующего сзади транспортного средства.
Второй этап вычисления может содержать:
- подэтап вычисления теоретического безопасного коридора с двух сторон от разделительной линии, при этом разделительная линия расположена между полосой движения данного транспортного средства и полосой движения, смежной с полосой движения данного транспортного средства,
- подэтап обнаружения присутствия транспортного средства в безопасном коридоре,
- подэтап вычисления второго теоретического бокового положения в зависимости от расстояния, отделяющего данное транспортное средство от транспортного средства, обнаруженного в указанном безопасном коридоре, и в зависимости от скорости транспортного средства, обнаруженного в указанном безопасном коридоре.
Способ вычисления может содержать первое условие исполнения способа вычисления, при этом первое условие исполнения соблюдается:
- если разделительные линии полосы движения данного транспортного средства обнаружены данным транспортным средством, и
- если кривизна полосы движения данного транспортного средства меньше или равна заранее определенному порогу.
Способ вычисления может содержать второе условие исполнения первого этапа вычисления, при этом второе условие исполнения соблюдается:
- если обнаружено по меньшей мере первое транспортное средство спереди данного транспортного средства,
- если обнаружено по меньшей мере второе транспортное средство спереди или сзади данного транспортного средства, и
- не активирован ни один мигающий сигнал данного транспортного средства.
Четвертый этап вычисления может содержать:
- подэтап обнаружения условий движения данного транспортного средства, и
- подэтап вычисления весового коэффициента первого теоретического бокового положения, весового коэффициента второго теоретического бокового положения и весового коэффициента третьего теоретического бокового положения в зависимости от обнаруженных условий движения данного транспортного средства.
Четвертый этап вычисления может содержать:
- подэтап ограничения отклонения между теоретическим боковым положением данного транспортного средства и теоретической центральной линией полосы движения данного транспортного средства, и/или
- подэтап ограничения изменения во времени теоретического бокового положения данного транспортного средства.
Способ вычисления может содержать:
- пятый этап автономного управления рулевым устройством данного транспортного средства, чтобы заставить данное транспортное средство занять теоретическое боковое положение, вычисленное в ходе четвертого этапа,
- шестой этап выведения на экран данного транспортного средства визуальной индикации относительного положения данного транспортного средства относительно теоретической центральной линии полосы движения данного транспортного средства.
Объектом изобретения является также компьютерный программный продукт, содержащий командные коды программы, записанные на носителе, считываемом компьютером, для осуществления этапов вышеупомянутого способа, когда указанная программа работает на компьютере. Объектом изобретения является также компьютерный программный продукт, загружаемый дистанционно из сети связи и/или записанный на носителе данных, считываемом компьютером, и/или исполняемый компьютером, при этом программный продукт содержит команды, которые при исполнении программы компьютером позволяют ему осуществлять вышеупомянутый способ.
Объектом изобретения является также носитель записи данных, считываемый компьютером, на котором записана компьютерная программа, содержащая командные коды программы осуществления вышеупомянутого способа, или носитель записи, считываемый компьютером и содержащий команды, которые при исполнении программы компьютером позволяют ему осуществлять вышеупомянутый способ.
Объектом изобретения является также сигнал носителя данных, содержащий вышеупомянутый компьютерный программный продукт.
Объектом изобретения является также рулевая система, содержащая вычислительное устройство, рулевое устройство, управляемое вычислительным устройством, и средства отслеживания окружающей среды, при этом средства отслеживания соединены с вычислительным устройством, при этом вычислительное устройство выполнено с возможностью осуществления вышеупомянутого способа вычисления.
Объектом изобретения является также автотранспортное средство, в частности, автономное транспортное средство, содержащее вычислительное устройство, рулевое устройство, управляемое вычислительным устройством, и средства отслеживания окружающей среды транспортного средства, при этом средства отслеживания соединены с вычислительным устройством, при этом вычислительное устройство выполнено с возможностью осуществления вышеупомянутого способа вычисления.
Описание чертежей
Эти объекты, отличительные признаки и преимущества настоящего изобретения будут подробно описаны в нижеследующем описании частного варианта выполнения, представленного в качестве не ограничительного примеры со ссылками на прилагаемые фигуры, на которых:
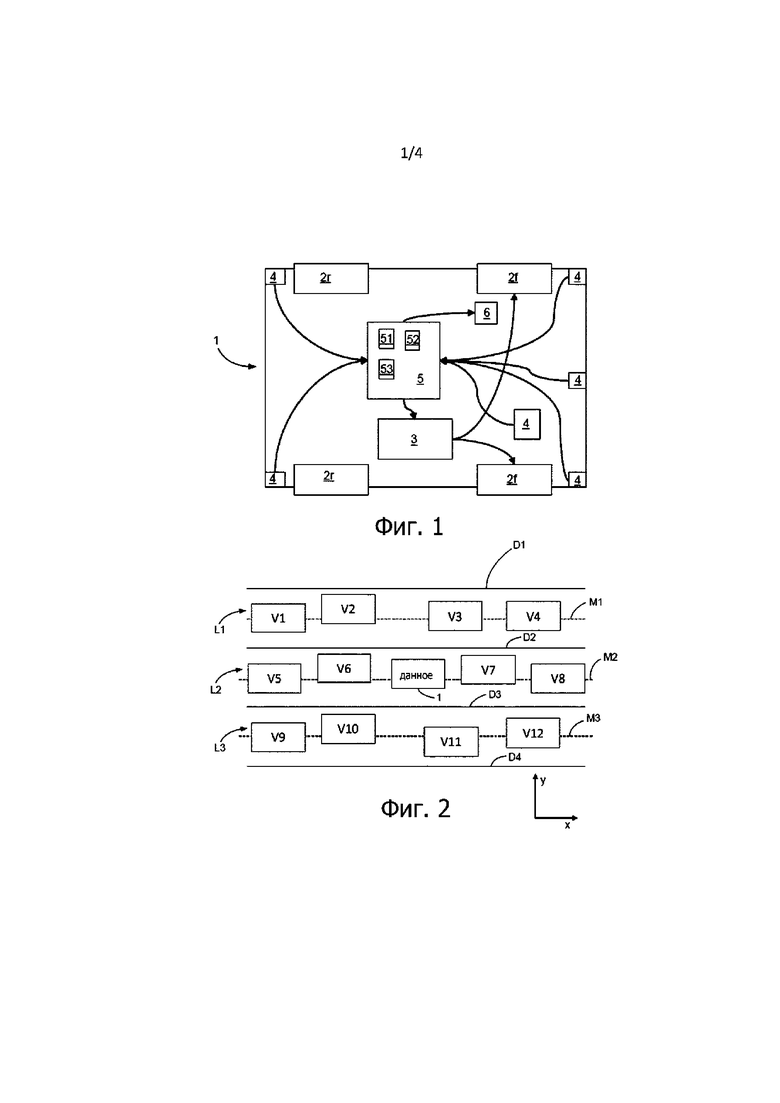
Фиг. 1 - схематичный вид автотранспортного средства согласно варианту выполнения изобретения.
Фиг. 2 - схематичный вид сверху дороги, содержащей три полосы движения, по который движутся заявленное транспортное средство и окружающие его транспортные средства.
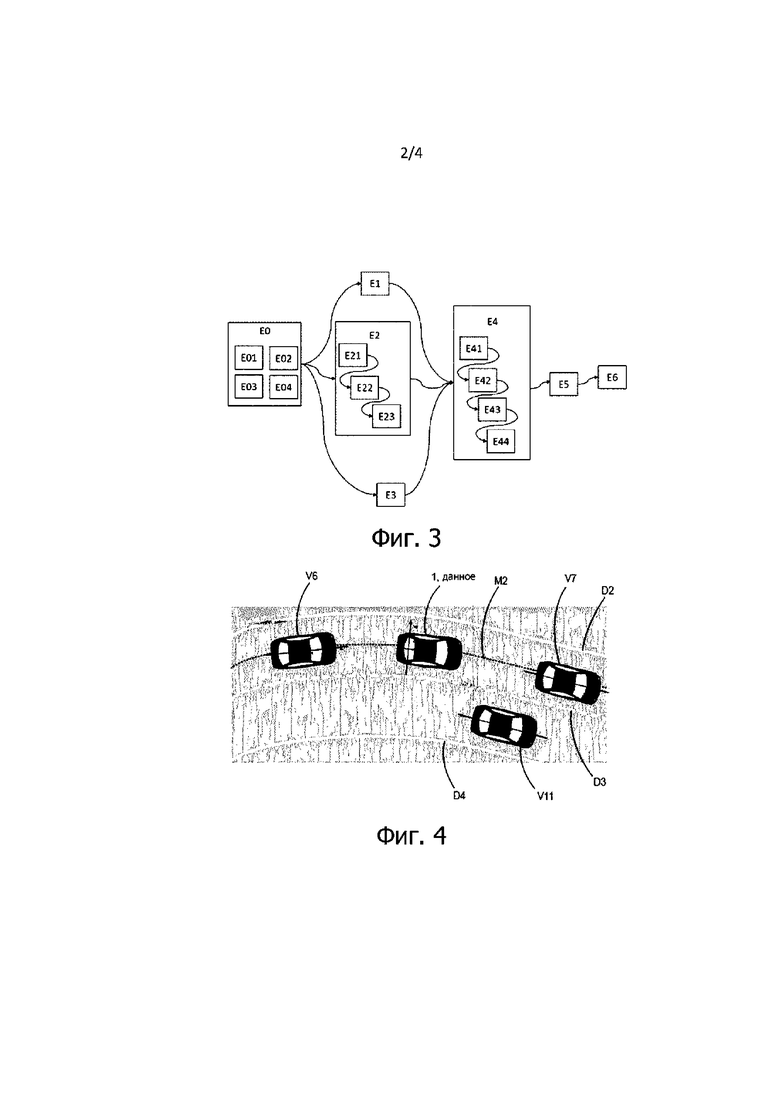
Фиг. 3 - блок-схема способа вычисления бокового положения согласно варианту выполнения изобретения.
Фиг. 4 - схематичный вид сверху первого примера ситуации вождения.
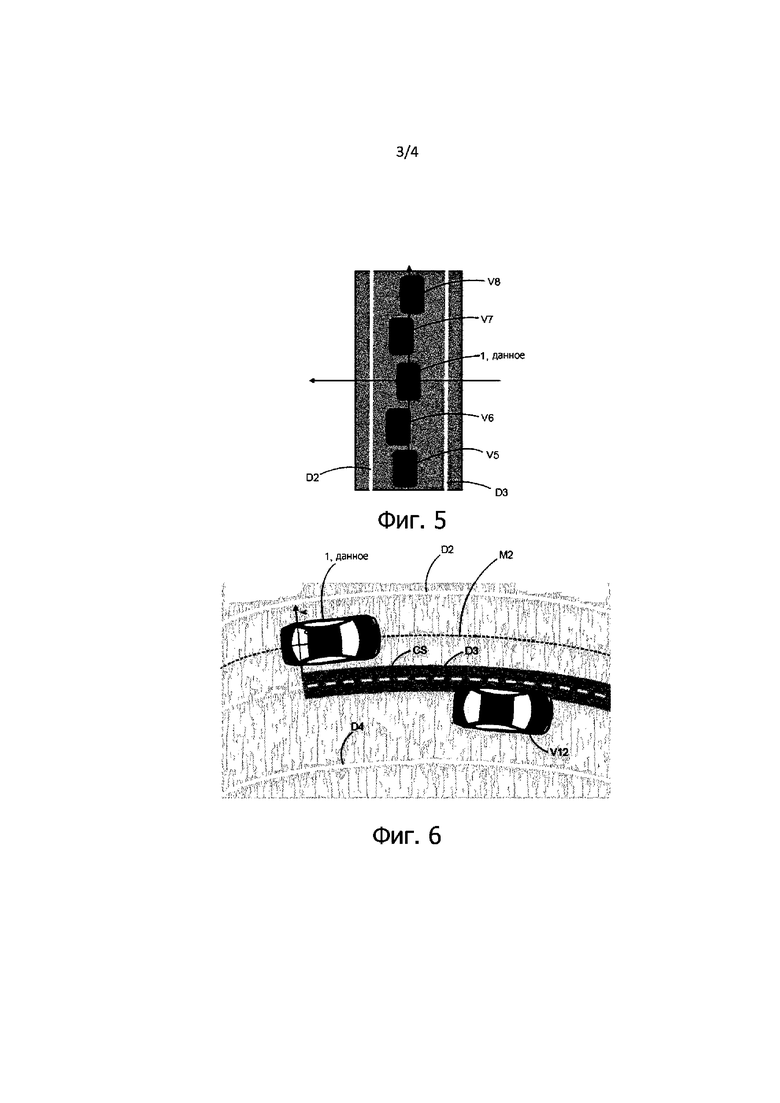
Фиг. 5 - схематичный вид сверху второго примера ситуации вождения.
Фиг. 6 - схематичный вид сверху третьего примера ситуации вождения.
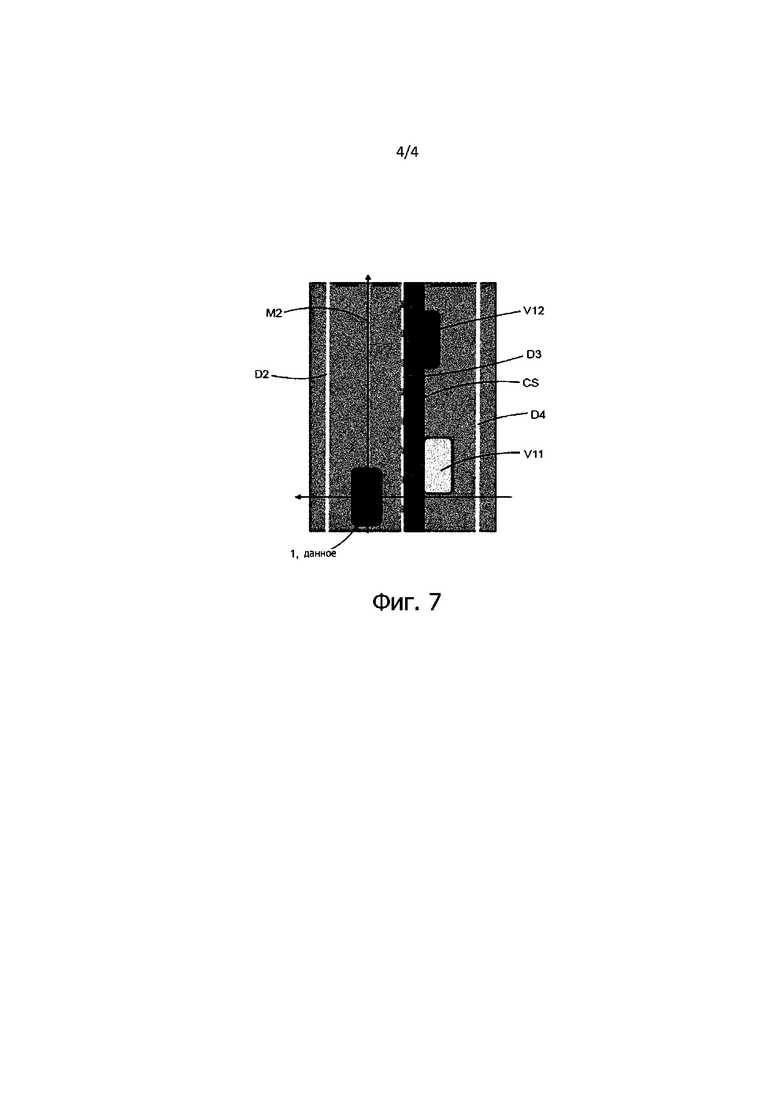
Фиг. 7 - схематичный вид сверху четвертого примера ситуации вождения.
Осуществление изобретения
На фиг. 1 схематично показано автотранспортное средство 1 согласно варианту выполнения изобретения. Транспортное средство 1 может быть любым. В частности, оно может быть легковым автомобилем, коммерческим транспортным средством, грузовиком или автобусом. Транспортное средство 1 содержит два передних колеса 2f, два задних колеса 2r, рулевое устройство 3, соединенное с двумя передними колесами 2f. Два передних колеса 2f являются управляемыми колесами. Их ориентацией управляет рулевая система. Рулевая система содержит, в частности, рулевое устройство 3 и средства отслеживания окружающей среды транспортного средства. Эти средства отслеживания представляют собой датчики 4 типа ADAS. Эти датчики могут быть, например, ультразвуковыми датчиками, камерами или радарами. Она выполнены с возможностью обнаруживать объекты или другие транспортные средства, расположенные вокруг транспортного средства 1. Согласно представленному варианту выполнения, транспортное средство содержит шесть датчиков 4, из которых пять радарных датчиков расположены в четырех углах транспортного средства и один спереди по существу посередине транспортного средства, а также камеру, выполненную с возможностью наблюдения дороги, в частности, спереди транспортного средства 1. В варианте датчики 4 могут быть выполнены в другом количестве и могут быть расположены в других местах на транспортном средстве 1.
Рулевая система содержит также вычислительное устройство 5 или электронный блок управления. В частности, вычислительное устройство 5 содержит память 51, микропроцессор 52 и интерфейс 53 ввода/вывода. При помощи своего интерфейса 53 вычислительное устройство соединено с датчиками 4, чтобы получать на входе сигналы от этих датчиков. При помощи своего интерфейса 53 вычислительное устройство 5 соединено также с рулевым устройством 4, чтобы передавать в рулевое устройство 3 команды ориентации управляемых колес 2f. Наконец, транспортное средство 1 содержит также приборную панель, оснащенную экраном 6. Экран 6 соединен с вычислительным устройством 5 и может отображать информацию, передаваемую вычислительным устройством для пользователя транспортного средства 1. Память 51 является носителем записи данных, на котором записана компьютерная программа, содержащая командные коды программы для осуществления способы вычисления бокового положения транспортного средства 1 согласно варианту выполнения изобретения. Микропроцессор 52 выполнен с возможностью исполнять командные коды, записанные в памяти 51.
Транспортное средство 1 является автономным транспортным средством. В частности, рулевое устройство 3, взаимодействующее с вычислительным устройством 5 и датчиками 4, может автономно контролировать ориентацию управляемых колес 21 транспортного средства. Таким образом, транспортное средство может перемещаться без пассажиров на борту или с пассажирами, не контролирующими напрямую траекторию транспортного средства.
Транспортное средство 1 может двигаться по дороге, занимаемой другими транспортными средствами. В частности, на фиг. 2 показано транспортное средство 1, называемое также данным транспортным средством, на дороге, содержащей три полосы движения L1, L2, L3. Термин «данное» является исключительно отличительным термином, позволяющим отличать транспортное средство 1 от транспортных средств, окружающих транспортное средство 1. Три полосы движения расположены смежно друг с другом. Три полосы движения идентифицированы и разделены разделительными линиями D1, D2, D3, D4, например, в виде линий белого цвета или желтого цвета, сплошных или прерывистых. Такие разделительные линии могут быть нанесены краской на дорожное покрытие и могут иметь по существу постоянную ширину. Транспортные средства могут менять полосу движения или, иначе говоря, менять ряд и двигаться через разделительные линии. Направление движения по трем полосам движения показано вектором Х. По полосам движения L1, L2, L3 могут также двигаться другие транспортные средства V1, V2, V3, V4, V5, V6, V7, V8, V9, V10, V11, V12. Транспортные средства V1, V2, V3 и V4 движутся по левой полосе движения L1. Транспортные средства V5, V6, V7 и V8 движутся по центральной полосе движения L2. В частности, транспортные средства V5 и V6 расположены сзади данного транспортного средства, а транспортные средства V7 и V8 расположены спереди данного транспортного средства. Иначе говоря, транспортные средства V5 и V6 следуют за данным транспортным средством, а транспортные средства V7 и V8 предшествуют данному транспортному средству. Таким образом, следующие и предшествующие транспортные средства движутся по той же полосе движения, что и данное транспортное средство. Наконец, транспортные средства V9, V10, V11 и V12 движутся по правой полосе движения L3. Транспортные средства V1-V12 являются транспортными средствами, которые могут быть обнаружены датчиками 4 транспортного средства. Хотя на фиг. 2 эти транспортные средства показаны в виде прямоугольников одинакового размера, в реальности они могут быть любыми и могут иметь любые размеры. Они могут двигаться с разными скоростями и могут иметь изменяющиеся во времени относительные положения. Другие транспортные средства, движущиеся дальше сзади или дальше спереди на этой дороге, могут не учитываться.
Боковое положение или смещение движущегося по дороге транспортного средства можно определить, как положение транспортного средства на полосе движения в направлении, перпендикулярном к направлению, в котором перемещается транспортное средство. Как показано на фиг. 2, транспортные средства перемещаются параллельно вектору Х. Следовательно, боковое положение транспортного средства обозначает положение транспортного средства вдоль вектора Y перпендикулярно к вектору Х. Для каждой полосы движения L1, L2, L3 можно определить теоретическую центральную линию М1, М2, М3 как линию, расположенную на равном расстоянии от разделительных линий D1, D2, D3, D4, ограничивающих полосу движения. Таким образом, центральная линия М1 расположена на одинаковом расстоянии от разделительных линий D1 и D2. Центральная линия М2 расположена на одинаковом расстоянии от разделительных линий D2 и D3. Центральная линия М3 расположена на одинаковом расстоянии от разделительных линий D3 и D4. Центральные линии М1, М2 и М3 являются теоретическими линиями, так как они не нанесены физически на полосы движения, а вычислены в зависимости от разделительных линий D1, D2, D3, D4. Боковое положение транспортного средства на данной полосе движения можно определить или вычислить относительно центральной линии этой полосы движения и вдоль ориентации вектора Y. Например, боковое положение может быть положительным, если центр рассматриваемого транспортного средства расположен или, иначе говоря, смещен влево от центральной линии, и отрицательным, если центр рассматриваемого транспортного средства смещен вправо от центральной линии.
Фиг. 3 схематично иллюстрирует способ вычисления бокового положения данного автотранспортного средства на полосе движения согласно варианту выполнения изобретения. Способ содержит последовательные этапы Е0, Е1, Е2, Е3, Е4, Е5, Е6 для вычисления бокового положения Tego для данного транспортного средства, затем для управления рулевым устройством 3 таким образом, чтобы данное транспортное средство заняло вычисленное боковое положение Tego. Этап Е0 является этапом инициализации способа вычисления. Первый этап Е1 является этапом вычисления первого теоретического бокового положения Т1 данного транспортного средства. Первое боковое положение Т1 вычисляют в зависимости от бокового положения транспортного средства, предшествующего данному транспортному средству и/или следующему за данным транспортным средством на той же полосе движения, что и данное транспортное средство. Таким образом, в соответствии с ситуацией, показанной на фиг. 2, первое боковое положение Т1 вычисляют в зависимости от бокового положения следующих сзади транспортных средств V5 и V6 и в зависимости от бокового положения предшествующих транспортных средств V7 и V8. Второй этап Е2 является этапом вычисления второго теоретического бокового положения Т2 данного транспортного средства. Второе боковое положение Т2 вычисляют в зависимости от положения транспортных средств на полосах движения, смежных с полосой движения данного транспортного средства. В соответствии с ситуацией, показанной на фиг. 2, второе боковое положение Т2 вычисляют в зависимости от положения транспортных средств, присутствующих на полосах L1 и L3, то есть транспортных средств V1, V2, V3, V4, V9, V10, V11, V12. Третий этап Е3 является этапом вычисления третьего теоретического бокового положения Т3 данного транспортного средства. Третье боковое положение Т3 вычисляют в зависимости от статичных препятствий (например, заграждений или барьеров), обнаруженных на боковых сторонах указанной полосы движения. Четвертый этап Е4 является этапом вычисления, на котором вычисляют боковое положение Tego данного транспортного средства в зависимости от первого бокового положения Т1, от второго бокового положения Т2 и от третьего бокового положения Т3. Пятый этап Е5 является этапом автономного управления рулевым устройством 3 данного транспортного средства, чтобы заставить данное транспортное средство занять теоретическое боковое положение Tego, вычисленное во время четвертого этапа Е4. Шестой этап Е6 является этапом выведения на экран 6 данного транспортного средства визуальной индикации, показывающей относительное положение данного транспортного средства по отношению к теоретической центральной линии полосы движения данного транспортного средства, то есть по отношению к центральной линии М2 в ситуации, показанной на фиг. 2.
Следует отметить, что боковое положение называют «теоретическим» в противоположность к реальному боковому положению. Следовательно, теоретическое боковое положение, вычисленное в данный момент, не обязательно соответствует реальному боковому положению транспортного средства в этот момент. Далее следует более подробное пояснение каждого из этих этапов Е0-Е6.
Во время этапа инициализации Е0 производят некоторые проверки и обнаружения, предваряющие этапы вычисления, позволяющие вычислить боковое положение Tego данного транспортного средства. Последующие этапы способа вычисления можно изменять, прерывать или останавливать, если эти условия не соблюдены и/или если не обнаружено никакое транспортное средство или препятствие.
На первом подэтапе Е01 этапа инициализации Е0 убеждаются, что датчики 4 обнаруживают разделительные линии D2, D3 полосы движения L2, по которой движется данное транспортное средство. Если это так, можно вывести положение центральной полосы М2 полосы движения L2, по которой движется данное транспортное средство. Как было указано выше, центральную линию М2 можно вычислить как линию, находящуюся на одинаковом расстоянии от разделительных линий D2 и D3. Центральную линию М2 можно также вычислить при помощи известного алгоритма или регулятора типа LCA или “Lane Centering Assist”. Если разделительные линии отсутствуют или плохо различимы, способ можно прервать, пока разделительные линии опять не станут видны.
На втором подэтапе Е02 этана инициализации Е0 вычисляют кривизну полосы движения L2. Если радиус кривизны полосы движения данного транспортного средства меньше или равен заранее определенному порогу, способ можно прервать, пока радиус кривизны полосы движения опять не превысит заранее определенный порог. Например, можно вычислить радиус кривизны центральной линии М2. Если радиус кривизны меньше заранее определенного значения, способ прерывают, пока радиус кривизны опять не станет больше заранее определенного значения. Это позволяет избежать изменения траектории транспортного средства на слишком крутом повороте, что могло бы дестабилизировать данное транспортное средство и/или привести к ошибочным вычислениям бокового положения данного транспортного средства.
Можно также осуществлять другие проверки, которые обуславливают продолжение способа вычисления. Например, пользователь транспортного средства может иметь возможность вручную активировать или деактивировать способ вычисления бокового положения. Способ вычисления может быть также активирован или деактивирован автоматически в зависимости от других рабочих параметров транспортного средства, например, таких как обнаружение нарушения в работе транспортного средства, в частности, нарушение в работе системы автономного вождения, обнаружение активации системы контроля траектории транспортного средства типа ESP или ABS или обнаружение какой-либо критической ситуации вождения.
На третьем подэтапе Е03 производят сканирование окружающего пространства транспортного средства при помощи датчиков 4, чтобы обнаружить транспортные средства и/или препятствия, окружающие транспортное средство. Если не обнаружено никакого транспортного средства и/или препятствия, способ можно перевести в режим ожидания или прервать, пока не будут обнаружены транспортные средства и/или препятствия. Если в окружающей среде данного транспортного средства обнаружены транспортные средства, можно определить их положение, их соответствующую скорость и даже их траекторию. Положение транспортных средств можно определить относительно положения данного транспортного средства. Например, положение окружающих транспортных средств можно определить в системе координат, образованной векторами Х и Y, при этом центром системы координат является данное транспортное средство. В частности, можно вычислить расстояние, отделяющее данное транспортное средство от каждого обнаруженного транспортного средства. Определяют также, на какой полосе движения находятся транспортные средства. Если транспортные средства обнаружены на полосе движения данного транспортного средства (спереди или сзади данного транспортного средства), можно вычислить боковое положение этих транспортных средств. В частности, можно вычислить положение каждого из этих транспортных средств по отношению к центральной линии М2. Кроме того, можно вычислить продольное расстояние, отделяющее данное транспортное средство от транспортных средств, находящихся на той же полосе движения, что и данное транспортное средство. Продольное расстояние между двумя транспортными средствами на одной и той же полосе движения можно определить, как расстояние, разделяющее два транспортных средства вдоль траектории центральной линии, то есть по криволинейной абсциссе, описываемой дорогой. Таким образом, продольное расстояние, разделяющее два транспортных средства, больше, чем абсолютное расстояние (с птичьего полета), разделяющее два транспортных средства, когда центральная линия описывает кривую.
Во время этапа инициализации Е0 можно также обнаруживать статичные объекты или препятствия, то есть объекты или препятствия, неподвижные относительно дороги. В конечном итоге по завершении этапа инициализации Е0 получают картину окружающей среды данного транспортного средства. Согласно варианту выполнения, картину данного транспортного средства можно получить не при помощи датчиков 4, установленных на данном транспортном средстве, а через средство беспроводной связи с данным транспортным средством. Например, положение и скорость каждого транспортного средства в окружающей среде данного транспортного средства можно получить при помощи протокола связи между транспортными средствами.
На четвертом подэтапе Е04 этапа инициализации Е0 можно проверить, в частности, присутствие предшествующих и/или следующих сзади транспортных средств на полосе движения L2 данного транспортного средства. В частности, во-первых, можно проверить, что обнаружено по меньшей мере одно первое транспортное средство спереди данного транспортного средства на полосе движения данного транспортного средства. Во-вторых, можно проверить, что обнаружено по меньшей мере одно второе транспортное средство спереди или сзади данного транспортного средства на полосе движения данного транспортного средства. Кроме того, можно проверить, что ни один мигающий сигнал данного транспортного средства не активирован, что свидетельствует об отсутствии намерения обгона со стороны данного транспортного средства. Если эти три условия соблюдены, то можно исполнить первый этап вычисления Е1. В противном случае способ вычисления можно прервать, пока эти три условия опять не будут соблюдены. В варианте способ можно продолжить, не осуществляя первый этап вычисления Е1 и основывая вычисление бокового положения Tego только на втором боковом положении Т2 и на третьем боковом положении Т3. Согласно другому варианту, способ можно продолжить, только если обнаружено транспортное средство перед данным транспортным средством и, если скорость данного транспортного средства является достаточно низкой.
Подэтапы Е01, Е02, Е03 и Е04 можно осуществлять независимо друг от друга, последовательно или параллельно. Их можно повторять бесконечно даже во время осуществления последующих этапов Е1-Е6. Следует отметить, что, если способ вычисления бокового положения прерван, остановлен или изменен, данное транспортное средство может постепенно расположиться условно в центре своей полосы движения, например, таким образом, чтобы центр данного транспортного средства находился на центральной линии М2.
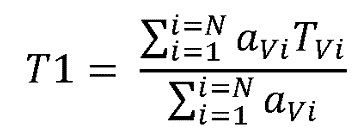
Первый этап Е1 вычисления может содержать подэтап вычисления средневзвешенного боковых положений транспортных средств спереди и/или сзади на указанной полосе движения, при этом весовые коэффициенты каждого бокового положения являются функцией расстояния, отделяющего данное транспортное средство от рассматриваемого предшествующего и/или следующего сзади транспортного средства. Иначе говоря, первое боковое положение Т1 можно вычислить при помощи следующей формулы:
[1]
 ,
,
где
- N обозначает число транспортных средств, обнаруженных на полосе движения данного транспортного средства,
- i обозначает индекс транспортных средств, присутствующих на полосе движения данного транспортного средства,
- Tvi обозначает боковое положение транспортного средства i на полосе движения данного транспортного средства,
- avi обозначает весовой коэффициент, соответствующий боковому положению транспортного средства i.
Каждый весовой коэффициент avi можно вычислить при помощи следующей формулы:
[2]
 ,
,
где
- Dvi обозначает продольное расстояние, отделяющее данное транспортное средство от транспортного средства i,
- Vvi обозначает скорость транспортного средства i,
- f и g обозначают картографии, то есть функции.
Например, картографии f и g можно определить таким образом, чтобы весовые коэффициенты соблюдали следующее неравенство: av7 > av6 > av8 > av5. Картографии f и g можно также определить таким образом, чтобы весовые коэффициенты avi увеличивались, когда транспортные средства i приближаются к данному транспортному средству и если их скорости понижаются. Функции f и g могут также быть откорректированы на транспортном средстве таким образом, чтобы улучшить поведение данного транспортного средства. Весовые коэффициенты avi могут также меняться в зависимости от возможных системных дефектов датчиков транспортного средства. Когда транспортное средство i перемещается в сторону на полосе данного транспортного средства, чтобы сменить полосу, его весовой коэффициент avi может быть приведен к 0. Иначе говоря, не происходит выравнивания по боковому положению Tvi транспортного средства i, пока оно осуществляет свой маневр смены полосы.
Как было указано при описании подэтапа инициализации Е04, чтобы осуществить первый этап Е1 вычисления, предпочтительно необходимо, чтобы присутствовали как минимум два транспортных средства спереди данного транспортного средства, или одно транспортное средство спереди данного транспортного средства и одно транспортное средство сзади данного транспортного средства, или только одно транспортное средство спереди на низкой скорости. При этом первое боковое положение Т1 воспроизводит среднее боковых положений транспортных средств, находящихся в том же ряду или на той же полосе движения, что и данное транспортное средство. Если все транспортные средства на той же полосе, что и данное транспортное средство, смещаются влево, то и данное транспортное средство тоже сместится влево. Точно так же, если все транспортные средства на той же полосе, что и данное транспортное средство, смещаются вправо, то и данное транспортное средство тоже сместится вправо. Занимая такое положение, данное транспортное средство вливается в поток движения. Это позволяет получить коридор для проезда мотоциклов и даже для спецтранспорта (например, машин скорой помощи, пожарных машин, полицейских машин,…). Данное транспортное средство не будет мешать проезду мотоциклов или спецтранспорта между транспортными средствами. Кроме того, данное транспортное средство больше располагается в продолжении движущегося спереди него транспортного средства. Водитель транспортного средства, предшествующего данному транспортному средству, может лучше наблюдать дорожную окружающую среду при помощи своих боковых зеркал, поскольку данное транспортное средство не мешает его обзору.
В примере, представленном на фиг. 4, предшествующее транспортное средство V7 и следующее сзади транспортное средство V6 расположены, оба, дальше внутрь поворота, то есть правее центральной линии М2. Данное транспортное средство выравнивает свое боковое расположение по положению транспортных средств V6 и V7 и тоже располагается с внутренней стороны поворота. В примере на фиг. 5, транспортные средства V5, V6 и V7 располагаются с левой стороны от центральной линии М2, тогда как транспортное средство V8 располагается с правой стороны. В результате вычисления средневзвешенного боковых положений транспортных средств V5-V8 данное транспортное средство в первом боковом положении Т1 тоже должно располагаться с левой стороны от центральной линии М2.
Второй этап Е2 вычисления схематически проиллюстрирован на фиг. 6 и 7. Второй этап Е2 позволяет адаптировать боковое положение данного транспортного средства в зависимости от присутствия мешающих транспортных средств на полосах движения, смежных с полосой движения данного транспортного средства. В частности, транспортные средства могут создавать помеху, если они являются очень широкими, например, как грузовики или автобусы, или если они просто неудачно расположены на своей собственной полосе движения. Второй этап Е2 содержит первый подэтап Е21 вычисления теоретической безопасной полосы или теоретического безопасного коридора с двух сторон от разделительной линии, расположенной между полосой движения данного транспортного средства и полосой движения, смежной с полосой движения данного транспортного средства. В частности, во время этого этапа можно также вычислить два безопасных коридора с двух сторон от двух разделительных линий D2, D3, ограничивающих полосу движения данного транспортного средства справа и слева. Безопасный коридор является виртуальной поверхностью, которая может быть расположена на стыке между полосой движения данного транспортного средства и смежной полосой движения. Центр безопасного коридора может быть расположен на разделительной линии, поэтому безопасный коридор находится как на полосе движения данного транспортного средства, так и на смежной полосе движения. Предпочтительно ширину безопасного коридора можно рассчитать. Чем больше эта ширина, тем больше вероятность обнаружения присутствия транспортного средства в безопасном коридоре. После определения безопасных коридоров при помощи датчиков 4 отслеживают потенциальное присутствие транспортного средства в безопасном коридоре.
На втором подэтапе Е22 обнаруживают присутствие транспортного средства в безопасном коридоре. Например, в ситуации, показанной на фиг. 6, обнаруживают присутствие транспортного средства V12 в безопасном коридоре CS. При этом можно вычислить расстояние, отделяющее данное транспортное средство от транспортного средства, обнаруженного в безопасном коридоре, и скорость транспортного средства, обнаруженного в безопасном коридоре.
На третьем подэтапе Е23 вычисляют второе боковое положение в зависимости от расстояния, отделяющего данное транспортное средство от транспортного средства, обнаруженного в безопасном коридоре. В частности, второе боковое положение Т2 может быть обратно пропорциональным времени до столкновения ТТС с обнаруженным транспортным средством и пропорциональным расстоянию зоны, на которое проникает обнаруженное транспортное средство в безопасный коридор CS. Время до столкновения ТТС, которое можно также назвать “time to reach”, можно определить как время, по истечении которого данное транспортное средство могло бы достичь транспортного средства, присутствующего в безопасном коридоре, если бы их траектории сошлись и если не предпринять никакой коррекции этих траекторий.
Например, второе боковое положение Т2 можно вычислить при помощи следующей формулы:
[3]
 ,
,
где
- М обозначает число транспортных средств, обнаруженных на смежной полосе движения слева от полосы движения данного транспортного средства,
- j является индексом транспортных средств, присутствующих на смежной полосе движения слева,
- Р обозначает число транспортных средств, обнаруженных на смежной полосе движения справа от полосы движения данного транспортного средства,
- k является индексом транспортных средств, присутствующих на смежной полосе движения справа,
- Lvj и Lvk обозначают соответственно расстояние проникновения транспортных средств j и k,
- Gvj и Gvk являются коэффициентами усиления, связанными соответственно с транспортными средствами j и k, при этом коэффициент усиления является картографией в зависимости от времени до столкновения ТТС и/или в зависимости от скорости соответственно транспортных средств j и k.
Поскольку коэффициенты усиления зависят от времени до столкновения ТТС, боковое положение Т2 может увеличиваться по мере приближения данного транспортного средства к рассматриваемому транспортному средству. Чем меньше время до столкновения ТТС, тем больше коэффициент усиления, связанный с рассматриваемым транспортным средством, может приближаться к 1, и тем ближе второе боковое положение Т2 будет приближаться к расстоянию проникновения рассматриваемого транспортного средства в безопасный коридор.
Вычисление второго бокового положения Т2 может быть произведено, если и только если существуют транспортные средства, для которых время до столкновения ТТС меньше заранее определенного порога. Таким образом, транспортные средства, для которых время до столкновения ТТС превышает этот порог, можно не учитывать. Вычисление второго бокового положения Т2 может также учитывать только транспортные средства, которые не осуществляют в данный момент маневра перехода на полосу данного транспортного средства. Такой маневр можно обнаружить, например, если рассматриваемое транспортное средство включило световой указатель, такой как мигающий сигнал. Можно также использовать алгоритмы, позволяющие обнаружить маневр смены полосы транспортного средства без активации его мигающего сигнала.
В ситуации, представленной в качестве примера на фиг. 7, присутствие транспортного средства V12 обнаружено в безопасном коридоре CS справа от полосы движения данного транспортного средства. При этом никакого транспортного средства не обнаружено на полосе движения слева от полосы движения данного транспортного средства, или даже дорога не содержит полосы движения слева от полосы движения данного транспортного средства. В соответствии с указанным выше вычислением данное транспортное средство во втором боковом положении Т2 должно сместиться левее от центральной полосы М2, чтобы сохранить достаточное безопасное расстояние с транспортным средством V12. С другой стороны, в ситуации, когда обнаружены два мешающих транспортных средства в безопасных коридорах справа и слева от полосы движения данного транспортного средства, данное транспортное средство может выровнять свое положение по центру, чтобы уравновесить расстояния с мешающими транспортными средствами справа и слева.
Ситуации, представленные на фиг. 6 и 7, могли бы возникнуть в случае, когда данное транспортное средство обгоняет транспортные средства V11 и V12 слева. Аналогичное вычисление может привести к смещению данного транспортного средства вправо, если должен произойти обгон данного транспортного средства слева транспортным средством, обнаруженным в левом безопасном коридоре. Способ вычисления можно также транспонировать для использования при движении слева и обгоне справа.
На третьем этапе Е3 вычисления вычисляют третье боковое положение Т3 данного транспортного средства в зависимости от статичных объектов, окружающих данное транспортное средство. Так же, как и для второго этапа Е2 вычисления, определяют безопасную полосу вокруг линий, смежных с данным транспортным средством. Третье боковое положение Т3 пропорционально расстоянию проникновения статичного объекта в безопасную зону вокруг разделительной линии, смежной с данным транспортным средством. Этот этап вычисления позволяет, например, воспроизвести поведение человека, который будет стремиться сместить свое транспортное средство на полосе, если защитный барьер оказывается близко к разделительной линии, смежной с данным транспортным средством.
На четвертом этапе Е4 вычисления вычисляют боковое положение Tego данного транспортного средства в зависимости от первого бокового положения Т1, от второго бокового положения Т2 и от третьего бокового положения Т3. В частности, боковое положение Tego данного транспортного средства можно вычислить при помощи средневзвешенного в следующем виде:
[4]
 ,
,
где
- а1 обозначает весовой коэффициент, соответствующий первому боковому положению Т1,
- а2 обозначает весовой коэффициент, соответствующий второму боковому положению Т2, и
- а3 обозначает весовой коэффициент, соответствующий третьему боковому положению Т3.
Предпочтительно весовые коэффициенты а1, а2 и а3 можно адаптировать в зависимости от условий движения данного транспортного средства. На первом подэтапе Е41 этапа Е4 вычисления можно определить условия движения данного транспортного средства. В частности, можно определить плотность дорожного трафика на дороге, на которую выезжает данное транспортное средство. Это обнаружение может быть основано, например, на показателе, полученном путем подсчета количества транспортных средств, присутствующих в данном периметре вокруг данного транспортного средства. Плотность дорожного трафика можно также оценить, анализируя продольное, а также боковое положение транспортных средств вокруг данного транспортного средства.
На втором подэтапе Е42 этапа Е4 вычисления можно вычислить весовые коэффициенты а1, а2 и а3 в зависимости от обнаруженных условий движения данного транспортного средства, в частности, в зависимости от плотности дорожного трафика. Например, можно определить, что а1=а2=а3=1/3, если необходимо придать столько веса каждому из трех ранее вычисленных боковых положений Т1, Т2, Т3. Эти параметры можно, например, использовать, когда дорожный трафик имеет нормальную или обычную плотность. Если обнаруживают ситуацию дорожной пробки, например, когда количество транспортных средств в данном периметре вокруг данного транспортного средства превышает определенный порог, весовые коэффициенты можно определить таким образом, чтобы а1=0,2, а2=0,8 и а3=0. Таким образом, придают больше веса ранее вычисленному второму боковому положению Т2 и пренебрегают вычисленным третьим боковым положением Т3. Таким образом, добиваются расположения данного транспортного средства на его полосе движения ближе к положению, получаемому при контроле транспортного средства водителем. Использование весового коэффициента, равного 0, позволяет пренебречь вычислением соответствующего бокового расстояния. Например, если условия, определяемые во время подэтапа Е04 инициализации, не соблюдены, можно придать весовому коэффициенту а1 нулевое значение. Значение этих коэффициентов А1, а2, а3 можно регулярно пересчитывать в зависимости от изменений условий движения.
Чтобы произвести вычисление бокового положения, обеспечивающего безопасность автомобилистов в любых обстоятельствах, можно фильтровать боковое положение, вычисленное при помощи средневзвешенного, как было описано выше. В частности, на третьем подэтапе Е043 можно определить потолок или, иначе говоря, ограничить по верхнему пределу максимальное отклонение между теоретическим боковым положением данного транспортного средства и теоретической центральной линией полосы движения данного транспортного средства. Этот потолок может зависеть от измеренной ширины полосы. Это позволяет избежать слишком большого смещения транспортного средства в одну или другую сторону полосы движения. В частности, можно избежать того, что данное транспортное средство само заходит внутрь ранее определенных безопасных коридоров. На четвертом подэтапе Е44 можно также ограничить изменение во времени теоретического бокового положения данного транспортного средства. Это позволяет избегать слишком резких изменений бокового положения, что могло бы привести к дестабилизации данного транспортного средства. Наконец, по завершении этапа Е4 получают идеальное боковое положение Tego, которое можно использовать для управления рулевым устройством 3.
На пятом этапе Е5 управляют рулевым устройством данного транспортного средства, чтобы заставить его занять боковое положение Tego, вычисленное на четвертом этапе. Этот этап управления происходит автономно, то есть без участия пользователя транспортного средства. Отклонение между измеренным реальным боковым положением данного транспортного средства и вычисленным боковым положением Tego приводит к вычислению заданного угла управляемых колес и, следовательно, команды управления для управляемы колес. Следовательно, рулевое устройство 3 поворачивает управляемые колеса транспортного средства таким образом, чтобы данное транспортное средство заняло боковое положение Tego. Затем этапы Е1-Е5 можно повторять с частотностью, определяемой таким образом, чтобы корректировать в реальном времени боковое положение данного транспортного средства.
На шестом этапе Е6 можно вывести на экран 6 данного транспортного средства визуальную индикацию, показывающую относительное положение данного транспортного средства по отношению к центральной линии полосы движения данного транспортного средства. Визуальная индикация может представлять собой, например, стрелку, ориентированную влево или ориентированную вправо в зависимости от смещения данного транспортного средства влево или вправо относительно центральной линии. Таким образом, не центрованное положение транспортного средства не застает врасплох пользователей данного транспортного средства. Они понимают, что смещенное от центра положение данного транспортного средства является результатом намеренного действия.
Благодаря изобретению, боковое положение транспортного средства вычисляют на основании предварительного вычисления трех разных боковых положений. Каждое из трех боковых положений Т1, Т2, Т3 вычисляют в зависимости от части окружающей среды данного транспортного средства. В конечном итоге получают более естественное боковое расположение транспортного средства на полосе движения. Транспортное средство лучше вписывается в поток движения. Оно сохраняет безопасные боковые расстояния, позволяя при этом мотоциклам или спецтранспорту обгонять ряды транспортных средств.
Группа изобретений относится к способу вычисления бокового положения данного транспортного средства на полосе движения. Способ содержит первый, второй, третий и/или четвертый этапы. На первом этапе вычисляют первое теоретическое боковое положение данного транспортного средства на полосе движения в зависимости от бокового положения на полосе движения транспортных средств, находящихся впереди данного транспортного средства, и/или транспортных средств, следующих позади данного транспортного средства. На втором этапе вычисляют второе теоретическое боковое положение данного транспортного средства на полосе движения в зависимости от положения транспортных средств на полосах движения, смежных с указанной полосой движения. На третьем этапе вычисляют третье теоретическое боковое положение данного транспортного средства на полосе движения в зависимости от статичных препятствий, обнаруженных на боковых сторонах указанной полосы движения. На четвертом этапе вычисляют боковое положение данного транспортного средства при помощи средневзвешенного значения первого бокового положения, второго бокового положения и третьего бокового положения. Достигается оптимизация безопасных боковых расстояний с транспортными средствами или препятствиями. 5 н. и 7 з.п. ф-лы, 7 ил.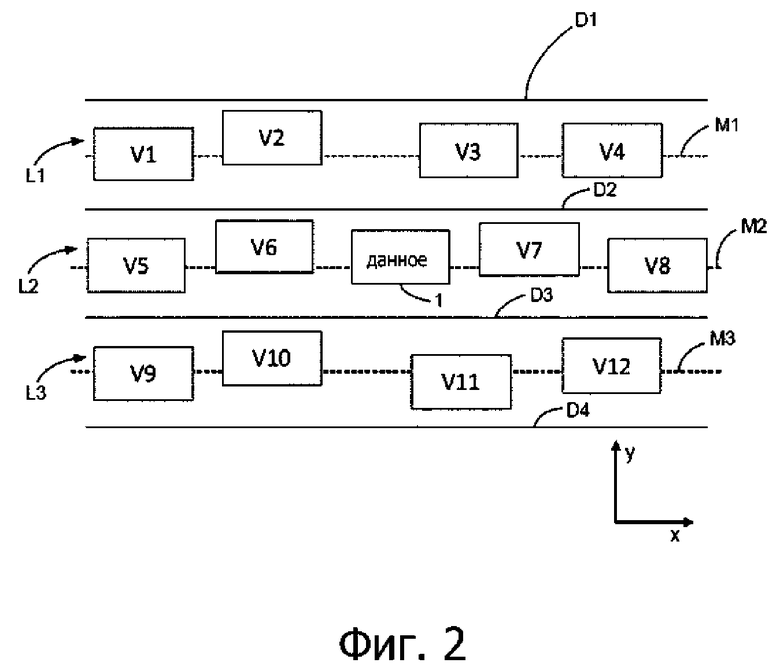
1. Способ вычисления бокового положения данного транспортного средства (1) на полосе движения (L2), при этом способ содержит:
первый этап (E1), на котором вычисляют первое теоретическое боковое положение данного транспортного средства (1) на указанной полосе движения (L2) в зависимости от бокового положения на указанной полосе движения (L2) транспортных средств (V7, V8), находящихся впереди данного транспортного средства, и/или транспортных средств (V5, V6), следующих позади данного транспортного средства, и/или
второй этап (Е2), на котором вычисляют второе теоретическое боковое положение данного транспортного средства (1) на указанной полосе движения (L2) в зависимости от положения транспортных средств (V1, V2, V3, V4, V9, V10, V11, V12) на полосах движения (L1, L3), смежных с указанной полосой движения,
третий этап (E3), на котором вычисляют третье теоретическое боковое положение данного транспортного средства (1) на указанной полосе движения (L2) в зависимости от статичных препятствий, обнаруженных на боковых сторонах указанной полосы движения (L2),
четвертый этап (E4), на котором вычисляют боковое положение данного транспортного средства (1) при помощи средневзвешенного значения первого бокового положения, второго бокового положения и третьего бокового положения.
2. Способ вычисления по п. 1, в котором первый этап (Е1) вычисления содержит подэтап, на котором вычисляют средневзвешенное значение боковых положений транспортных средств (V7, V8), находящихся впереди, и/или транспортных средств (V5, V6), следующих позади, на указанной полосе движения, при этом весовые коэффициенты каждого бокового положения являются функцией продольного расстояния, отделяющего данное транспортное средство (1) от рассматриваемого транспортного средства (V7, V8), находящегося впереди, и/или от рассматриваемого транспортного средства (V5, V6), следующего позади, и скорости рассматриваемого транспортного средства, находящегося впереди, и/или рассматриваемого транспортного средства, следующего позади.
3. Способ вычисления по п. 1 или 2, в котором второй этап (Е2) вычисления содержит:
подэтап (Е21), на котором вычисляют теоретический безопасный коридор (CS) с двух сторон от разделительной линии (D2), при этом разделительная линия (D2) расположена между полосой движения (L2) данного транспортного средства и полосой движения (L1), смежной с полосой движения данного транспортного средства,
подэтап (E22), на котором обнаруживают присутствие транспортного средства в безопасном коридоре,
подэтап (E23), на котором вычисляют второе теоретическое боковое положение (T2) в зависимости от расстояния, отделяющего данное транспортное средство (1) от транспортного средства (V12), обнаруженного в указанном безопасном коридоре (CS), и в зависимости от скорости транспортного средства (V12), обнаруженного в указанном безопасном коридоре (CS).
4. Способ вычисления по любому из пп. 1-3, содержащий первое условие исполнения способа вычисления, при этом первое условие исполнения соблюдается:
если разделительные линии (D2, D3) полосы движения (L2) данного транспортного средства (1) обнаружены данным транспортным средством, и
если кривизна полосы движения (L2) данного транспортного средства меньше или равна заданному порогу.
5. Способ вычисления по любому из пп. 1-4, содержащий второе условие исполнения первого этапа вычисления, при этом второе условие исполнения соблюдается:
если обнаружено по меньшей мере одно первое транспортное средство (V7, V8) впереди данного транспортного средства,
если обнаружено по меньшей мере одно второе транспортное средство (V5, V6, V7, V8) впереди или позади данного транспортного средства, и
не активирован ни один мигающий сигнал данного транспортного средства.
6. Способ вычисления по любому из пп. 1-5, в котором четвертый этап (Е4) вычисления содержит:
подэтап (Е41), на котором обнаруживают условия движения данного транспортного средства, и
подэтап (Е42), на котором вычисляют весовой коэффициент первого теоретического бокового положения, весовой коэффициент второго теоретического бокового положения и весовой коэффициент третьего теоретического бокового положения в зависимости от обнаруженных условий движения данного транспортного средства.
7. Способ вычисления по любому из пп. 1-6, в котором четвертый этап (Е4) вычисления содержит:
подэтап (Е43), на котором ограничивают отклонение между теоретическим боковым положением данного транспортного средства и теоретической центральной линией (М2) полосы движения (L2) данного транспортного средства, и/или
подэтап (Е44), на котором ограничивают изменение во времени теоретического бокового положения данного транспортного средства.
8. Способ вычисления по любому из пп. 1-7, содержащий:
пятый этап (Е5), на котором выполняют автономное управление рулевым устройством (3) данного транспортного средства, чтобы вызвать занятие данным транспортным средством теоретического бокового положения, вычисленного на четвертом этапе (Е4),
шестой этап (Е6), на котором отображают на экране (6) данного транспортного средства визуальную индикацию положения данного транспортного средства относительно теоретической центральной линии (М2) полосы движения (L2) данного транспортного средства.
9. Компьютерный программный продукт, содержащий командные коды программы, записанные на считываемом компьютером носителе, для выполнения этапов способа по любому из пп. 1-8, когда указанная программа исполняется на компьютере.
10. Считываемый компьютером носитель записи данных, на котором записана компьютерная программа, содержащая командные коды программы выполнения способа по любому из пп. 1-8.
11. Рулевая система, характеризующаяся тем, что содержит вычислительное устройство (5), рулевое устройство (3), управляемое вычислительным устройством, и средства (4) отслеживания окружающей среды, при этом средства (4) отслеживания соединены с вычислительным устройством, при этом вычислительное устройство выполнено с возможностью выполнения способа вычисления по любому из пп. 1-8.
12. Автотранспортное средство (1), в частности автономное транспортное средство, характеризующееся тем, что содержит вычислительное устройство (5), рулевое устройство (3), управляемое вычислительным устройством, и средства (4) отслеживания окружающей среды транспортного средства, при этом средства (4) отслеживания соединены с вычислительным устройством, при этом вычислительное устройство выполнено с возможностью выполнения способа вычисления по любому из пп. 1-8.
| JP 2019059451 A, 18.04.2019 | |||
| US 2005228588 A1, 13.10.2005 | |||
| EP 3002178 A1, 06.04.2016 | |||
| US 2017326980 A1, 16.11.2017. |

