Изобретение относится к области приборостроения, а именно к устройствам персональной автономной навигации и ориентации, и может быть использовано для навигации и ориентации в геологии, военном, автомобильном деле, туризме и альпинизме.
Известно «Навигационное устройство, встроенное в одежду», содержащее размещенные на одежде и связанные между собой электрически приемный блок, служащий для приема и обработки сигналов глобальных навигационных спутниковых систем и формирования навигационной информации, блок питания, средство для включения-выключения устройства и дисплей с экраном для отображения навигационной информации патент РФ на изобретение №2429524, МПК6 G06F 9/00, опубл. 27.07.2009.
Известен военный ГЛОНАСС/GPS навигатор «Грот-М», содержащий блок электронный со встроенной навигационной антенной, внешнюю навигационную антенну, устройство зарядное, блок питания, запасной блок аккумуляторов. Навигатор обеспечивает определение текущих координат, путевую скорость и курс движения потребителя по сигналам космических навигационных систем (КНС) ГЛОНАСС и GPS, решение сервисных задач, вычисление дирекционного угла, запоминание отдельных точек и маршрутов движения.
Известна также малогабаритная навигационная аппаратура ГЛОНАСС/GPS «Бриз-КМ-РВ», содержащая приемник навигационный, антенну выносную, устройство зарядное, запасной блок аккумуляторов (техническое описание «Бриз-КМ», сайт ЗАО «КБ НАВИС»).
Данная аппаратура позволяет определять координаты удаленного объекта только с использованием засечки объекта с 2-х точек, координаты которых определяются по системам ГЛОНАСС и GPS путем определения дирекционных углов ориентированного направления на удаленный объект. Также эта аппаратура не позволяет определять координаты удаленного объекта с одной точки измерения и измерять навигационные параметры (координаты, курс и скорость движения) движущихся объектов, не позволяет определять местоположение оператора в условиях отсутствия приема сигналов систем ГЛОНАСС/GPS.
К недостаткам вышеуказанного аналога относятся то, что контроллер не обеспечивает возможностей расширения вводов-выводов, а также не обеспечивает контроля параметров окружающей среды (температура, давление, внешние механические воздействия), кроме того, оснащение его жидкокристаллическим дисплеем и клавиатурой увеличивает его стоимость.
Наиболее близким аналогом к предлагаемому техническому решению является «Устройство для персональной навигации и ориентации» на основе переносной измерительно-вычислительной системы индивидуального пользования с тремя каналами автономных измерений и обработки информации - гравиметрическим, тахометрическим и магнитометрическим, каждый из которых выполнен по схеме последовательного соединения датчиков первичной информации через аналого-цифровой преобразователь интерфейса с соответствующими вычислителями блока обработки информации, соединенными, в свою очередь, с устройствами вывода информации, при этом датчики первичной информации, входящие в состав блока датчиков информации, выполнены на основе трехкомпонентных блоков гравиметров-акселерометров, гироскопов-тахометров и магнитометров, при этом в блок информации в магнитометрический канал дополнительно введены вычислители калибровок и погрешностей монтажа магнитометров, вычислитель параметров магнитного поля основания, вычислитель грубой и точной начальной выставки основания, вычислители вариаций сигналов магнитометров и текущих координат, соединенных между собой последовательно, а также вычислители параметров геомагнитного поля, функций чувствительности и координат базовой и контрольных точек маршрута, соединенные со всеми тремя каналами автономных измерений, при этом все вычислители выполнены на основе микросхем с шестнадцатиразрядной сеткой.
Патент РФ на ПМ №134633, МПК G01C 23/00, опубл. 2013.11.20.
К техническому результату относится расширение функциональных возможностей комплекса за счет введения в его схему микроконтроллера и подключенных к нему лазерного дальномерно-угломерного прибора и переносной радиостанции.
Достижение указанного результата обеспечивается за счет того, что комплекс для персональной навигации включает переносной навигационный прибор на основе измерительно-вычислительной системы индивидуального пользования с тремя каналами автономных измерений и обработки информации гравиметрическим, тахометрическим и магнитометрическим способом. При этом в схему устройства включены гравиметр-акселерометр, гироскоп-тахометр и магнитометр. Переносной навигационный прибор снабжен клавиатурой и дисплеем с экраном для отображения навигационной информации.
Кроме того, в комплекс введен приемник спутниковых навигационных систем, а также микроконтроллер, который на основе выходных данных гравиметра-акселерометра, гироскопа-тахометра и магнитометра вычисляет текущие координаты методом расчета расстояния во время отсутствия достоверных навигационных данных с выхода приемника спутниковых навигационных систем. Также в комплекс введены лазерный дальномерно-угломерный прибор и переносная радиостанция, которые подключены к микроконтроллеру переносного навигационного прибора. В свою очередь комплекс содержит вторую радиостанцию и ЭВМ командира, которые служат для приема и передачи вычисленных навигационных данных об удаленном объекте через переносную радиостанцию по радиоканалу на радиостанцию средства поражения.
Между совокупностью существенных признаков заявляемого объекта и достигаемым техническим результатом существует причинно-следственная связь, а именно:
введение в схему комплекса микроконтроллера обеспечивает на основе выходных данных гравиметра-акселерометра, гироскопа-тахометра и магнитометра вычисление текущих координат методом расчета расстояния во время отсутствия достоверных навигационных данных с выхода приемника спутниковых навигационных систем;
введение в схему комплекса лазерного дальномерно-угломерного прибора и переносной радиостанции, а также второй радиостанции и ЭВМ командира, обеспечивают прием и передачу вычисленных навигационных данных об удаленном объекте через переносную радиостанцию по радиоканалу на радиостанцию ЭВМ командира и средства поражения.
Следовательно, функциональные возможности комплекса расширяются за счет обеспечения измерения координат удаленного объекта с одной точки, измерения навигационных параметров (координаты, курс и скорость движения) движущихся объектов, измерения координат оператора и удаленного объекта в условиях неуверенного приема сигналов спутниковых навигационных систем ГЛОНАСС/GPS/Galileo, определения направления на географический Север (электронный компас) при любом положении прибора, оперативной передачи навигационных данных по радиоканалу на ЭВМ командира и на средства поражения.
Комплекс для персональной навигации поясняется схемами на фиг. 1 и 2.
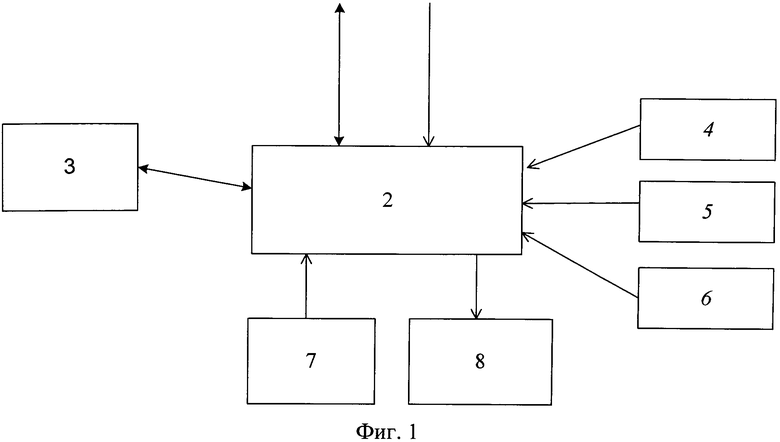
Фиг. 1 - Комплекс для персональной навигации (схема переносного навигационного прибора).
Фиг. 2 - Комплекс для персональной навигации (общая блок-схема).
Комплекс для персональной навигации согласно фиг. 1 и 2 содержит переносной навигационный прибор 1, содержащий микроконтроллер 2, связанный с приемником спутниковых навигационных систем 3, и гравиметром-акселерометром 4, гироскопом-тахометром 5 и магнитометром 6, с помощью которых микроконтроллер 2 по их выходным данным вычисляет текущие координаты методом расчета расстояния во время отсутствия достоверных навигационных данных с выхода навигационного приемника 3. Переносной навигационный прибор снабжен клавиатурой 7 и дисплеем 8 с экраном для отображения навигационной информации.
Кроме того, в комплекс введен лазерный дальномерно-угломерный прибор 9 и переносная радиостанция 10, которые также подключены к микроконтроллеру 2 переносного навигационного прибора 1, а также комплекс содержит вторую радиостанцию 11 и ЭВМ командира 12, которые служат для приема и передачи вычисленных навигационных данных об удаленном объекте 13 через переносную радиостанцию 10 по радиоканалу на радиостанцию средства поражения 14.
Комплекс для персональной навигации работает следующим образом: переносной навигационный прибор 1 определяет собственные текущие координаты, которые высвечиваются на его дисплее 8, на котором также отображается местоположение на карте местности. Собственные координаты могут определяться по сигналам спутниковых систем ГЛОНАСС, GPS, Galileo, а в отсутствие приема спутниковых сигналов, с помощью встроенного комплекта прецизионных инерциальных датчиков (гравиметра-акселерометра 4, гироскопа-тахометра 5 и магнитометра 6), выполненных, с целью обеспечения малых габаритов и веса, на основе микроэлектромеханических микросхем. При помощи лазерного дальномерно-угломерного прибора 9 измеряются расстояние до удаленного объекта 13, азимут и угол места относительно точки измерения. Дальномерно-угломерный прибор 9 подключается к переносному навигационному прибору по стандартному стыку, например, RS-232. На основе полученных от дальномера полярных координат объекта относительно точки измерения, навигационный прибор производит пересчет координат объекта в заданных системах координатах СК-95, СК-42, WGS-84.
Полученные данные поступают на переносной навигационный прибор 1, где осуществляется вычисление координат удаленного объекта 13. Далее по радиоканалу координаты объекта передаются на ЭВМ командира 12 или средства поражения 14 (артиллерия, вертолет). Для определения направления на магнитный Север используются данные магнитометра и акселерометра, что позволяет компенсировать наклон прибора. Для определения направления на географический Север учитываются значения магнитного склонения в данной местности.
Предлагаемое в качестве изобретения техническое решение позволяет расширить функциональные возможности комплекса за счет обеспечения измерения координат удаленного объекта с одной точки, измерения навигационных параметров (координаты, курс и скорость движения) движущихся объектов, измерения координат оператора и удаленного объекта в условиях неуверенного приема сигналов спутниковых навигационных систем ГЛОНАСС/GPS/Galileo, определения направления на географический Север (электронный компас) при любом положении прибора, оперативной передачи навигационных данных по радиоканалу на ЭВМ командира и на средства поражения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИНАМИЧЕСКОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНЫХ ОБЪЕКТОВ | 2016 |
|
RU2624790C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2444451C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2439497C1 |
| СПОСОБ ПЕРСОНАЛЬНОЙ АВТОНОМНОЙ НАВИГАЦИИ | 2013 |
|
RU2523753C1 |
| ПЕРЕНОСНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОГНЕВОЙ ПОДДЕРЖКИ И БОЕВОГО ОБЕСПЕЧЕНИЯ | 2019 |
|
RU2725942C1 |
| СИСТЕМА ИНФОРМАЦИОННОГО ОБМЕНА ТОПОПРИВЯЗЧИКА | 2012 |
|
RU2498222C1 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2607197C2 |
| Автономный мобильный модуль повышения точности определения координат и маршрутов движения войсковых объектов | 2020 |
|
RU2762080C1 |
| АВИАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ | 2007 |
|
RU2346852C1 |
Изобретение относится к области приборостроения и может быть использовано для навигации и ориентации в геологии, военном, автомобильном деле, туризме и альпинизме. Технический результат - расширение функциональных возможностей. Для этого в комплекс введены приемник спутниковых навигационных систем, а также микроконтроллер, который на основе выходных данных гравиметра-акселерометра, гироскопа-тахометра и магнитометра вычисляет текущие координаты методом расчета расстояния во время отсутствия достоверных навигационных данных с выхода приемника спутниковых навигационных систем. При этом лазерный дальномерно-угломерный прибор и переносная радиостанция подключены к микроконтроллеру переносного навигационного прибора, вторая радиостанция и ЭВМ командира служат для приема и передачи вычисленных навигационных данных об удаленном объекте через переносную радиостанцию по радиоканалу на радиостанцию средства поражения. 2 ил.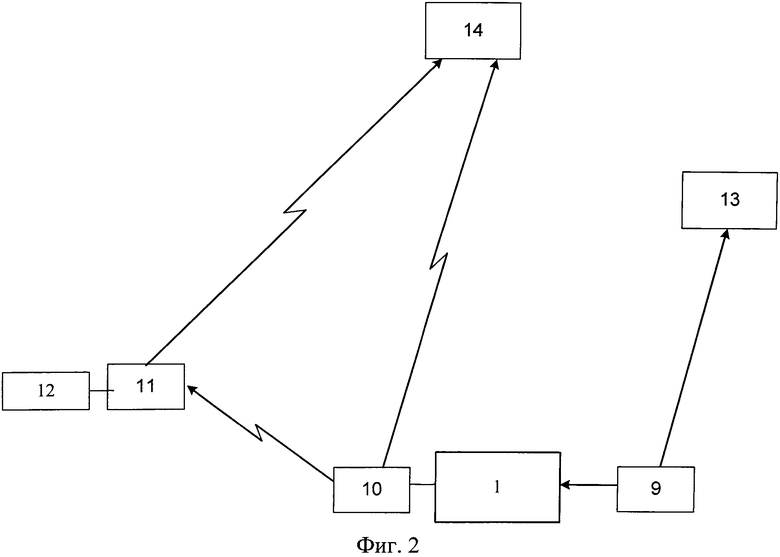
Комплекс для персональной навигации, включающий переносной навигационный прибор на основе измерительно-вычислительной системы индивидуального пользования с тремя каналами автономных измерений и обработки информации гравиметрическим, тахометрическим и магнитометрическим способом, при этом в схему устройства включены гравиметр-акселерометр, гироскоп-тахометр и магнитометр, кроме того, переносной навигационный прибор снабжен клавиатурой и дисплеем с экраном для отображения навигационной информации, отличающийся тем, что в комплекс введен приемник спутниковых навигационных систем, а также микроконтроллер, который на основе выходных данных гравиметра-акселерометра, гироскопа-тахометра и магнитометра вычисляет текущие координаты методом расчета расстояния во время отсутствия достоверных навигационных данных с выхода приемника спутниковых навигационных систем, кроме того, в комплекс введен лазерный дальномерно-угломерный прибор и переносная радиостанция, которые подключены к микроконтроллеру переносного навигационного прибора, а также комплекс содержит вторую радиостанцию и ЭВМ командира, которые служат для приема и передачи вычисленных навигационных данных об удаленном объекте через переносную радиостанцию по радиоканалу на радиостанцию средства поражения.
| Устройство для снятия со шпуль остатков пряжи и резервной намотки | 1960 |
|
SU134633A1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2007 |
|
RU2348011C1 |
| Устройство для испытания изделий на случайные вибрации | 1978 |
|
SU763714A1 |
| Привод буровой лебедки с электродвигателем переменного тока | 1959 |
|
SU126822A1 |
| СПОСОБ КОНТРОЛИРУЕМОГО ОРИЕНТИРОВАНИЯ НА МЕСТНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2310881C1 |

