1. Область техники, к которой относится изобретение
Изобретение относится к системам и способам определения курсового угла транспортного средства.
2. Уровень техники
Глобальная система местоопределения (GPS) является космической глобальной навигационной спутниковой системой. В общем, система непрерывно обеспечивает услуги по надежному определению места и времени пользователям по всему миру в любом месте на поверхности или вблизи Земли, из которого беспрепятственно наблюдаются, по меньшей мере, четыре спутника системы GPS.
Системы GPS, использующие две антенны, можно применять для определения линии курса (например, рыскания), крена и тангажа транспортного средства. Угловая пространственная ориентация относится к линии курса, крену и тангажу транспортного средства. Для определения угловой пространственной ориентации можно использовать некоторые условия, например, расстояния между двумя антеннами GPS или сильно ограниченную информацию об угловой пространственной ориентации, например, диапазоны ожидаемых углов тангажа и крена для наземной навигации, управления и направления машины. Кроме того, известен подход с введением ограничивающего условия по расстоянию в процедуру калмановской фильтрации. Однако, данное ограничивающее условие по расстоянию нуждается в линеаризации для обеспечения точности. Так как, обычно, расстояния между двумя антеннами GPS являются очень короткими, обычно, около 1 метра, то матрицу расчета, которую применяют для обработки данных измерений GPS, чтобы обеспечить промежуточные вычисления конечного положения или оценки угловой пространственной ориентации, нельзя точно определить из плавающего решения. Поэтому, процедура калмановской фильтрации может расходиться, если нелинейность точно не учитывается. Другая проблема состоит в том, что кинематическое плавающее решение в реальном времени не может удовлетворять ограничивающим условиям базовой длины через значительное время после того, как применена процедура решения неопределенности в целочисленных переменных.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В одном варианте осуществления, система содержит первую и вторую антенны, связанные с транспортным средством. Первая и вторая антенны сконфигурированы с возможностью приема сигналов, содержащих данные глобальной системы местоопределения. Входной каскад приемника сконфигурирован с возможностью приема сигналов, содержащих данные глобальной системы местоопределения. Устройство электронной обработки данных может принимать данные глобальной системы местоопределения из входного каскада приемника. Устройство обработки данных сконфигурировано или запрограммировано с возможностью исполнения способа определения угловой пространственной ориентации транспортного средства, которая может содержать курсовой угол транспортного средства.
В одном примере, способ, исполняемый устройством электронной обработки данных, содержит этапы измерения фаз несущих для несущих, соответствующих сигналам, принимаемым из первой и второй антенн. Устройство обработки определяет наборы решений неопределенности для измеренных фаз несущих, с использованием известной базовой длины между первой и второй антеннами, чтобы удовлетворить ограничивающим условиям по постоянной длине и угловой пространственной ориентации в процессе поиска в кинематическом механизме поиска в реальном времени.
В качестве дополнения или альтернативы, устройство обработки или фильтр компенсации погрешности обрабатывает измеренные фазы несущих в наборах решений неопределенности, соответствующих сигналам, с использованием базовой длины между первой и второй антеннами в качестве виртуального измерения в фильтре. Устройство обработки может оценивать местоположения первой и второй антенн с использованием фильтрованных фаз несущих и фильтрованных наборов решений неопределенности первого и второго сигналов. Устройство обработки будет иметь возможность определения курсового угла транспортного средства на основании оценок местоположений первой и второй антенн.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
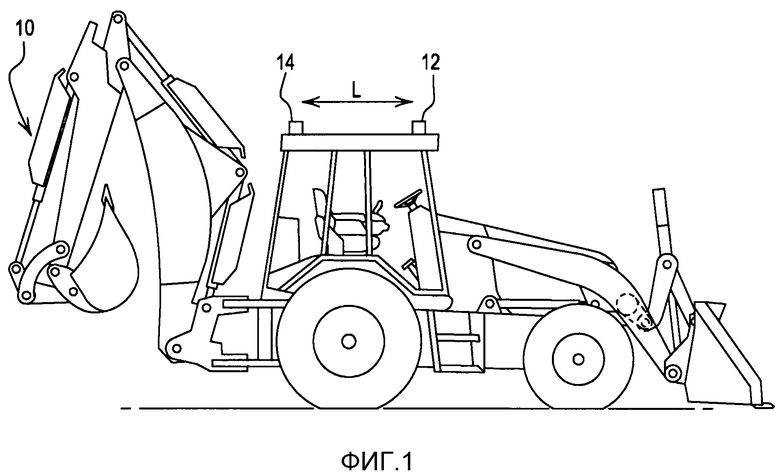
Фиг. 1 - изображение транспортного средства, содержащего в своем составе один вариант осуществления системы и способа определения курсового угла транспортного средства;
Фиг. 2 - блок-схема одного варианта осуществления системы для определения курсового угла транспортного средства, показанного на фиг. 1; и
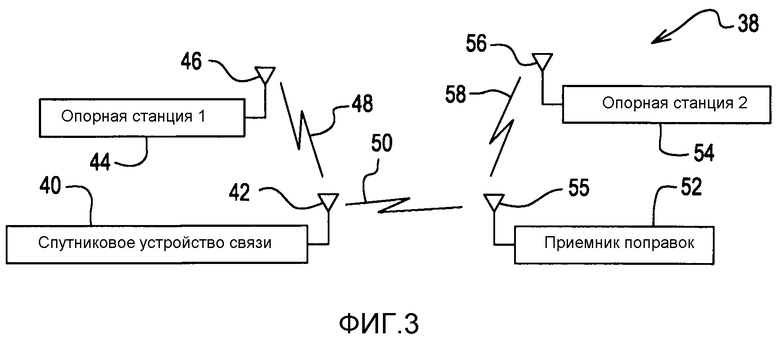
Фиг. 3 - блок-схема одного варианта осуществления, показывающая опорные станции системы GPS, которые можно использовать совместно с системой, показанной на фиг. 2.
ПОДРОБНОЕ ОПИСАНИЕ
На фиг. 1 показано транспортное средство 10, содержащее в своем составе систему для определения курсового угла транспортного средства или оборудования, соединенное с транспортным средством 10. Кроме того, система может быть смонтирована на оборудовании, которое не соединено с транспортным средством. В данном варианте осуществления, транспортное средство 10 является канавокопателем с обратной лопатой, и оборудование содержит переднее навесное приспособление (например, ковш), заднее навесное приспособление или сопутствующие подвижные элементы (например, кронштейны или стрелы); однако, любое из множества транспортных средств или оборудования разных типов может использовать систему для определения курсового угла транспортного средства или оборудования. Например, транспортное средство 10 или оборудование может быть автомобилем, тракторным прицепом, строительным оборудованием, лесозаготовительным оборудованием или сельскохозяйственным оборудованием. Кроме того, транспортное средство 10 или оборудование не обязательно должно быть наземным, но может быть также воздушным или морским транспортным средством или оборудованием, например, воздушным судном или кораблем.
Транспортное средство 10 содержит как первую антенну 12, так и вторую антенну 14. Первая и вторая антенны сконфигурированы с возможностью приема сигналов, содержащих данные глобального местоопределения. Как известно, данные глобального местоопределения, обычно, формируются спутниковой глобальной системой местоопределения, но могут также дополняться наземной системой. В настоящем варианте осуществления, первая антенна 12 и вторая антенна 14 расположены продольно. Другими словами, антенны, обычно, расположены по длине транспортного средства. Однако, следует понимать, что антенны могут быть расположены поперечно, т.е. по ширине транспортного средства 10 или оборудования, или иначе установлены на транспортном средстве или оборудовании.
Кроме того, следует отметить, что длина L между первой антенной 12 и второй антенной 14 является известной базовой длиной. В общем, данная известная базовая длина, приблизительно, равна одному метру плюс/минус десять процентов. Однако, следует понимать, что известная базовая длина может быть меньше, чем один метр, или может быть больше, чем один метр, в зависимости от применения системы для определения курсового угла транспортного средства 10.
На фиг. 2 показана система 16 для определения курсового угла транспортного средства 10 или оборудования. Как поясняется в предыдущих параграфах, первая антенна 12 и вторая антенна 14 имеют известную базовую длину L между ними. Первая антенна 12 и вторая антенна 14 имеют связь и соединены с входным каскадом 18 приемника. Входной каскад 18 приемника принимает первые сигналы, содержащие данные глобального местоопределения из первой антенны 12 и вторые сигналы, содержащие данные глобального местоопределения из второй антенны 14.
Система 16 содержит также компьютерную систему 20, которую можно назвать системой обработки данных приемника. Компьютерная система 20 содержит декодер 22, устройство 24 измерения фазы, кинематический механизм 26, работающий в реальном времени, (RTK-механизм) и запоминающее устройство 28. Компьютерная система 20 содержит также интерфейс 30 данных. Интерфейс 30 данных является, по существу, шиной данных или совместно используемой электронной памятью, соединяющей между собой входной каскад 18 приемника, декодер 22, устройство 24 измерения фазы, RTK-механизм и запоминающее устройство 28, или поддерживающей связь между ними. В общем, интерфейс 30 данных является физическим проводником. Однако, интерфейс 30 данных может иметь любую из подходящих форм, например, форму беспроводного интерфейса.
Декодер 22 принимает первый и второй сигналы из входного каскада 18 приемника и декодирует данные сигналы так, что их можно обрабатывать в устройстве 24 измерения фазы и кинематическим механизмом 26, работающим в реальном времени. В частности, декодер 22 декодирует псевдокоды (например, коды грубого определения местоположения объектов, точные коды или коды псевдослучайных помех), закодированные в первых сигналах и вторых сигналах, чтобы оценить псевдодальности между каждой из антенн 12 и 14 и соответствующими спутниками, способными передавать первые и вторые сигналы. Устройство 24 измерения фазы измеряет фазы несущих для несущих, соответствующих первым и вторым сигналам.
Кинематический механизм 26, работающий в реальном времени, содержит устройство 32 обработки данных, фильтр 34 компенсации погрешности и блок 36 оценки. Устройство 32 обработки данных определяет наборы решений неопределенности для измеренных фаз несущих, с использованием известной базовой длины L, чтобы удовлетворить ограничивающим условиям постоянной длины и угловой пространственной ориентации в процессе поиска.
В одном варианте осуществления, устройство 32 обработки данных или фильтр 34 компенсации погрешности (например, калмановский фильтр или другой прогнозирующий фильтр) применяет обработку или фильтрацию к измеренным фазам несущих в наборах решений неопределенности, соответствующих сигналам, с использованием известной базовой длины между первой антенной 12 и второй антенной 14, в качестве виртуального измерения в фильтре 34 компенсации погрешности, при этом, вес виртуального измерения в фильтре 34 компенсации погрешности пропорционален дисперсии положения. Например, фильтр 34 компенсации погрешности применяет процесс фильтрации измеренных фаз несущих и наборов решений неопределенности, соответствующих первым и вторым сигналам, с использованием разложения в ряд Тейлора первого порядка. Упомянутый процесс фильтрации выполняется с использованием известной базовой длины L в качестве виртуального измерения, в фильтре 34 компенсации погрешности, при этом, вес виртуального измерения в фильтре 34 компенсации погрешности пропорционален дисперсии положения.
Блок 36 оценки оценивает местоположения первой антенны 12 и второй антенны 14, с использованием фильтрованных фаз несущих и фильтрованных наборов решений неопределенности первых и вторых сигналов. Устройство 32 обработки данных может определять курсовой угол (или углы угловой пространственной ориентации) транспортного средства или его оборудования на основании оценок местоположений первой антенны 12 и второй антенны 14. Устройство 32 обработки данных может быть дополнительно сконфигурировано с возможностью изменения дисперсии виртуального измерения на основании точности плавающего решения после того, как измерены как фазы несущих, так и псевдодальности. Кроме того, устройство 32 обработки может быть сконфигурировано с возможностью применения уравнения двойной разности к измеренным фазам несущих и псевдодальностям первых и вторых сигналов перед применением фильтра компенсации погрешности (например, калмановского фильтра). Термин двойная разность относится к наблюдаемому объекту, который сформирован вычислением разности между спутниками и между станциями. Уравнение двойной разности основано на вычитании двух результатов одиночных разностных измерений фаз несущих, выполненных в системе GPS 16 и в опорной станции (например, опорной станции 44 или опорной станции 54 на фиг. 3), например, по отношению к спутниковым сигналам от двух разных спутников. Уравнение двойной разности применяют к измерениям фаз несущих, чтобы исключить или ослабить отрицательное влияние систематической ошибки часов приемника (например, посредством первой разности между результатами измерениями фаз несущих) и систематической ошибки часов спутника (например, посредством второй разности между результатами измерениями фаз несущих).
Чтобы исследовать влияние нелинейной ошибки на точность виртуальных измерений, устройством 32 обработки определяются границы линеаризованной ошибки, как поясняется в последующих параграфах. Разумеется, устройство 32 обработки может быть единственным устройством обработки или может содержать любое из следующих изделий: по меньшей мере, один микропроцессор, по меньшей мере, один микроконтроллер, по меньшей мере, одно устройство обработки данных, по меньшей мере, один цифровой специализированный микропроцессор (ASIC), по меньшей мере, одну программируемую логическую матрицу (PLA) или другие полупроводниковые приборы, или устройства, схемы или модули для электронной обработки данных, способные исполнять код, исполняемый устройством обработки.
В дальнейшем, принято, что L0 означает длину известной базы, и сигма 
Виртуальное измерение задается уравнениями (1)-(3):



где Х=(δх1δх2δx3Y)T, 

Затем, устройство 32 обработки обновляет обработку векторного состояния расширенного калмановского фильтра для данного виртуального измерения ограничивающего условия. 

где λmin и λmax являются характеристическими числами матрицы Гесса 
Для модели дальности

где  означает разности между координатами опорного местоположения и вездехода, соответствующими измерению, при этом, матрица Гесса равна
означает разности между координатами опорного местоположения и вездехода, соответствующими измерению, при этом, матрица Гесса равна

с предельными характеристическими числами, равными λmin=0 и λmax=1/L0. Из уравнения (6), границы нелинейной ошибки, обусловленной пренебрежением остаточными членами второго порядка, равны:

Если первая антенна 12 и вторая антенна 14 расположены продольно, то устройство 32 обработки дополнительно выполнено с возможностью определения курсового угла (α) и точности (σα) в виде:
где N и Е означают, соответственно, северную и восточную составляющие базы, и 

где U означает составляющую вертикального смещения.
Если первая антенна 12 и вторая антенна 14 расположены поперечно, то устройство 32 обработки дополнительно выполнено с возможностью определения курсового угла (α) и точности (σα) в виде:
где N и Е означают, соответственно, северную и восточную составляющие базы, и
где U означает составляющую вертикального смещения.
Независимо от того, какая схема расположения применена для первой антенны 12 и второй антенны 14, устройство 32 обработки может быть дополнительно сконфигурировано с возможностью применения функции расширения для повышения точности, когда базовая длина меньше, чем некоторая пороговая длина, чтобы отразить линеаризованные ошибки для виртуального базового измерения базовой длины. В общем, данная базовая длина составляет около 1 м, +/- 10%. Одна из упомянутых расширенных весовых функций может иметь вид:

Устройство 32 обработки может быть также сконфигурировано с возможностью определения предварительно заданного числа наилучших возможных наборов решений неопределенности посредством применения процесса поиска неопределенности. Устройство 32 обработки сконфигурировано, при определении наилучших возможных наборов решений неопределенности, с возможностью определения предварительно заданного числа наилучших возможных наборов решений неопределенности посредством применения процесса поиска неопределенности. Наилучшие возможные наборы решений неопределенности определяются из возможных наборов в пространстве поиска, которые удовлетворяют критерию поиска или обеспечивают решение или приближенное решение в пределах, например, заданного уровня надежности, точности и общего времени обработки (например, для получения в реальном времени решения для угловой пространственной ориентации или линии курса транспортного средства или его оборудования). В общем, число возможных наборов решений неопределенности составляет, приблизительно, 30-40, но в запоминающем устройстве 28 может храниться любое подходящее число.
Базовую длину L можно рассматривать как виртуальное измерение, с использованием уравнений (1)-(3) и (8) для обновления стандартного калмановского фильтра до плавающего решения. Однако, базовую длину можно изменять вследствие решения неопределенности в целочисленных переменных. Чтобы обеспечить для базовой длины и возможных условий, ограничивающих угловую пространственную ориентацию, возможность удовлетворения требований процесса решения неопределенности, применяют нижеописанную процедуру.
С общей целью решения неопределенности, в процессе поиска в памяти сохраняются наилучшие и вторые наилучшие возможные наборы решений неопределенности. Отношение соответствующих им квадратичных форм остатков, т.е. F-отношение, является важнейшим статистическим значением для проверки неопределенности и контроля качества. Для поддержки базовых ограничивающих условий, процедура поиска и фиксации неопределенности должна использовать преимущество известного дополнительного ограничивающего условия. Способ, которым выполняется данная задача, является внутренним вопросом для настоящей процедуры, а общим является требование, чтобы базовая длина фиксированного решения удовлетворяла упомянутому ограничивающему условию.
Чтобы вычислить фиксированное решение (Xfix) для каждого возможного набора решений неопределенности, устройство 32 обработки сконфигурировано с возможностью использования следующего уравнения:

Ограничивающее условие, которое должно быть удовлетворено для предварительно заданного числа наилучших возможных наборов решений неопределенности, представляет собой (а) ограничивающее условие по известной базовой длине в дополнение к расчетному допуску, (b) ограничивающее условие по известной базовой угловой пространственной ориентации в дополнение к расчетному допуску, (с) плавающую 3-мерную базовую оценку (Xfloat), соответствующую плавающей неопределенности (Nf), и/или (d) фиксированное решение (Xfix), вычисляемое с использованием корректировочной матрицы А(3×(Nf)). В случае если отсутствует или существует только один возможный набор решений неопределенности, удовлетворяющий ограничивающему условию, то устройство 32 обработки сконфигурировано с возможностью не обеспечивать фиксированного решения (Xfix).
На фиг. 3 показана одна возможная дополняющая система 38 для обеспечения дифференциальных данных или поправочных данных для системы 16 или системы 20 обработки данных приемника, показанной на фиг. 2. Одинаковые номера позиций на фиг. 2 и фиг. 3 обозначают одинаковые элементы.
Приемник 52 поправок, показанный на фиг. 3, может быть соединен с системой 16, показанной на фиг. 2, или может иметь связь с системой 16 или системой 20 обработки данных приемника по линии передачи (например, и через порт передачи данных, соединенный с интерфейсом 30 данных). Как показано, система 16, показанная на фиг. 2, может содержать приемник, определяющий местоположение, с системой 20 обработки данных приемника.
В одном варианте осуществления, приемник 52 поправок принимает данные поправок (например, данные поправки фазы опорной несущей) из первой опорной станции 44, второй опорной станции 54 или обеих данных станций. Например, первая опорная станция 44 передает данные поправок с помощью, по меньшей мере, одного беспроводного или электромагнитного сигнала (48, 50) в приемник 52 поправок через спутниковое устройство 40 связи, которое может содержать спутниковый ретранслятор на искусственном спутнике на орбите над земной поверхностью. Аналогично, вторая опорная станция 54 может передавать данные поправок с помощью беспроводных или электромагнитных сигналов (58) через наземную базовую станцию (например, содержащуюся в составе второй опорной станции 54) в приемник 52 поправок.
В одной конфигурации, первая опорная станция 44 содержит приемник, определяющий опорное местоположение, с антенной 46 в известном или фиксированном местоположении, системой обработки опорных данных и передатчиком или приемопередатчиком (например, передатчиком для передачи на спутник). В одном варианте осуществления, приемник, определяющий опорное местоположение, регистрирует данные фаз несущих, соответствующие, по меньшей мере, одному несущему сигналу навигационных спутников (не показанных) и определяет исходное решение неопределенности или набор решений неопределенности для нескольких сигналов навигационных спутников, принимаемых антенной 46 приемника, определяющего местоположение. Система обработки опорных данных принимает данные фаз несущих, и исходное решение неопределенности корректирует упомянутые данные, с использованием известного или фиксированного местоположения приемника, определяющего опорное местоположение, или его антенны 46, чтобы определить улучшенное решение неопределенности. В одном примере, скорректированные данные фаз несущих содержат оценку фазы несущей и улучшенное решение неопределенности или другие выведенные из них данные. В свою очередь, скорректированные данные фаз несущих или другие данные поправки передаются с помощью беспроводного сигнала или электромагнитного сигнала (48, 50) через спутниковое устройство 40 связи в приемник 52 поправок. Приемник 52 поправок принимает скорректированные данные фаз несущих или другие данные поправки, которые доступны для пользователя, по меньшей мере, чего-то одного из системы, кинематического механизма 26, работающего в реальном времени, или блока 36 оценки, чтобы определять положение транспортного средства или объекта, связанного с системой 16, или оценивать положение (или угловую пространственную ориентацию) антенн (12, 14) системы 16.
В одной конфигурации, вторая опорная станция 54 содержит приемник, определяющий опорное местоположение, с антенной 56 в известном или фиксированном местоположении, системой обработки опорных данных и передатчиком или приемопередатчиком (например, высокочастотной или сверхвысокочастотной базовой станцией). В одном варианте осуществления, приемник, определяющий опорное местоположение, регистрирует данные фаз несущих, соответствующие, по меньшей мере, одному несущему сигналу навигационных спутников, и определяет исходное решение неопределенности или набор решений неопределенности для нескольких сигналов спутников, принимаемых антенной 56 приемника, определяющего местоположение. Если приемник 52 поправок и его антенна 55 находятся в пределах дальности передаваемого беспроводного сигнала второй опорной станции 54, то, в одной конфигурации, приемник 52 поправок может принимать данные поправок из второй опорной станции 54 с помощью беспроводного сигнала 58. В свою очередь, приемник 52 поправок может подавать любые принятые данные поправок в систему 20 обработки данных приемника для повышения точности оценки положения (или угловой пространственной ориентации) антенн (12, 14) системы 16.
Вышеприведенное описание предмета изобретения следует считать наглядным, а не ограничивающим, и предполагается, что прилагаемая формула изобретение должна охватывать все модификации, усовершенствования и другие варианты осуществления, которые находятся в истинных пределах существа и объема настоящего изобретения. Таким образом, в максимальной степени, допускаемой законом, объем настоящего изобретения должен определяться наиболее широкой допустимой интерпретацией нижеприведенной формулы изобретения и ее эквивалентов и не должен быть сужен или ограничен вышеприведенным подробным описанием.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДЛЯ ОЦЕНИВАНИЯ ПОЛОЖЕНИЯ С КОМПЕНСАЦИЕЙ СМЕЩЕНИЯ | 2011 |
|
RU2567501C2 |
| Способ транспортировки твердых коммунальных отходов с управлением местоположением транспортного средства и система его реализации | 2022 |
|
RU2773736C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2009 |
|
RU2419106C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ КОРРЕКЦИЙ ЧАСОВ | 2012 |
|
RU2574333C2 |
| ПОДВИЖНЫЙ ОПОРНЫЙ ПРИЕМНИК ДЛЯ КИНЕМАТИЧЕСКОЙ НАВИГАЦИИ В РЕАЛЬНОМ ВРЕМЕНИ (RTK), ОСНОВАННОЙ НА ПОПРАВКАХ, ВЫЧИСЛЕННЫХ В ОПОРНОМ ПРИЕМНИКЕ | 2005 |
|
RU2386980C2 |
| ОПРЕДЕЛЕНИЕ МЕСТОПОЛОЖЕНИЯ ОКОНЕЧНОГО УСТРОЙСТВА БЕСПРОВОДНОЙ СВЯЗИ В СМЕШАННОЙ СИСТЕМЕ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ | 2003 |
|
RU2327303C2 |
| СПОСОБ МАТЕРИАЛЬНО-ТЕХНИЧЕСКОГО ОБЕСПЕЧЕНИЯ С УПРАВЛЕНИЕМ МЕСТОПОЛОЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2588339C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ОЦЕНКИ ПОЛОЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ СДВОЕННЫХ КИНЕМАТИЧЕСКИХ МЕХАНИЗМОВ РЕАЛЬНОГО ВРЕМЕНИ | 2011 |
|
RU2552646C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МОБИЛЬНОГО ПРИЕМНИКА СПУТНИКОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ (СРНС) | 2010 |
|
RU2432584C2 |
| УСТРОЙСТВО ЗАЩИТЫ ТРАНСПОРТНОГО СРЕДСТВА ОТ УГОНА И КРАЖ | 2000 |
|
RU2185298C2 |
Изобретение относится к области радионавигации. Техническим результатом является определение курсового угла транспортного средства или оборудования, соединенного с транспортным средством. Система и способ определения курсового угла транспортного средства содержат первую и вторую антенны (12, 14), связанные с транспортным средством. Первая и вторая антенны (12, 14) выполнены с возможностью приема сигналов, содержащих данные системы глобального местоопределения. Входной каскад (18) приемника сконфигурирован с возможностью приема сигналов, содержащих данные системы глобального местоопределения. Устройство (32) электронной обработки данных способно принимать данные системы глобального местоопределения из входного каскада (18) приемника. Устройство (32) обработки данных сконфигурировано или запрограммировано с возможностью исполнения способа определения угловой пространственной ориентации транспортного средства, которая может содержать курсовой угол транспортного средства. 2 н. и 23 з.п. ф-лы, 3 ил.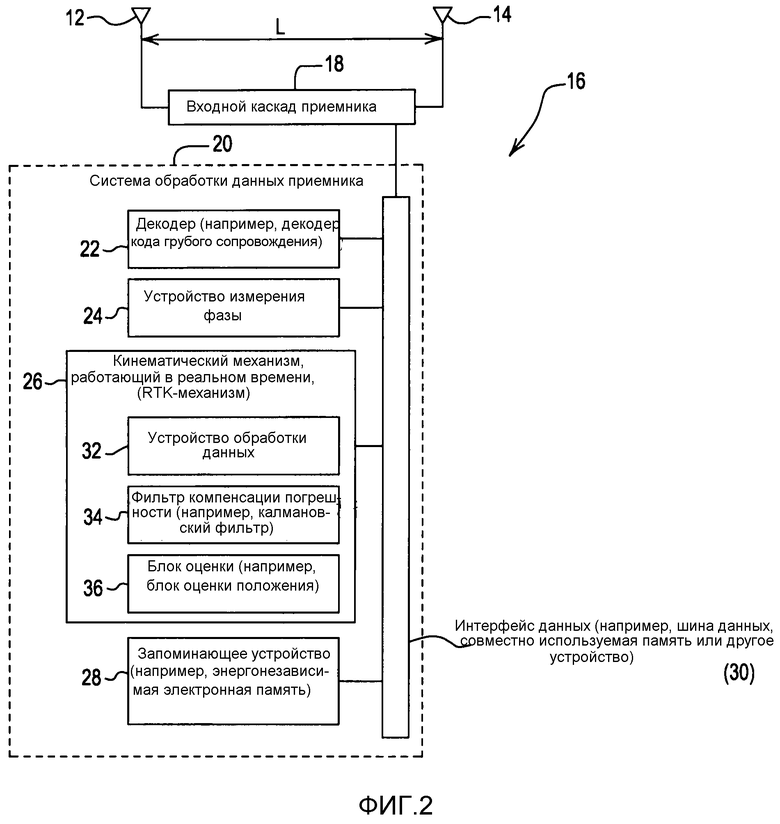
1. Система для определения курсового угла транспортного средства или курсового угла оборудования, соединенного с транспортным средством, содержащая:
первую антенну, связанную с транспортным средством, причем первая антенна выполнена с возможностью приема первых сигналов, содержащих данные глобальной системы местоопределения;
вторую антенну, связанную с транспортным средством, причем вторая антенна выполнена с возможностью приема вторых сигналов, содержащих данные глобальной системы местоопределения;
входной каскад приемника для приема первых и вторых сигналов;
устройство электронной обработки данных, выполненное с возможностью принимать данные глобального местоопределения из входного каскада приемника, причем устройство обработки данных сконфигурировано или запрограммировано:
измерять фазы несущих для несущих, соответствующих первым сигналам и вторым сигналам;
определять наборы решений неопределенности для измеренных фаз несущих, используя известную базовую длину между первой антенной и второй антенной, чтобы удовлетворить ограничивающим условиям по постоянной длине и угловой пространственной ориентации в процессе поиска в кинематическом механизме поиска в реальном времени;
определять предварительно заданное количество или диапазон количеств наборов решений неопределенности для первых и вторых сигналов из первой и второй антенн путем применения процесса поиска неопределенности;
применять фильтр компенсации погрешности к измеренным фазам несущих и наборам решений неопределенности, соответствующим первым и вторым сигналам, используя упомянутую известную базовую длину между первой и второй антеннами в качестве виртуального измерения в фильтре;
оценивать местоположения первой и второй антенн, используя фильтрованные фазы несущих и фильтрованные наборы решений неопределенности первых и вторых сигналов; и
определять курсовой угол транспортного средства или его оборудования на основе оценок местоположений первой антенны и второй антенны.
2. Система по п. 1, в которой вес виртуального измерения в фильтре компенсации погрешности пропорционален дисперсии положения.
3. Система по п. 1, в которой фильтр компенсации погрешности содержит калмановский фильтр и применяется с использованием разложения в ряд Тейлора первого порядка.
4. Система по п. 1, в которой устройство обработки данных дополнительно сконфигурировано с возможностью изменения дисперсии виртуального измерения на основе точности плавающего решения после того, как измерены как фазы несущих, так и псевдодальности.
5. Система по п. 1, в которой первая и вторая антенны соединены с транспортным средством вдоль продольной оси транспортного средства.
6. Система по п. 4, в которой устройство обработки данных дополнительно сконфигурировано с возможностью определения курсового угла (α) и точности (σα) в виде:
где N и Е означают, соответственно, северную и восточную составляющие базы, и и означают соответствующие дисперсии.
7. Система по п. 5, в которой устройство обработки данных дополнительно сконфигурировано с возможностью определения угла тангажа (φ) в виде:
где U означает составляющую вертикального смещения.
8. Система по п. 5, в которой устройство обработки данных дополнительно сконфигурировано с возможностью применения функции расширения для повышения точности виртуального базового измерения, когда базовая длина меньше, чем некоторая пороговая длина, чтобы отразить линеаризованные ошибки для виртуального базового измерения базовой длины.
9. Система по п. 7, в которой упомянутая некоторая пороговая длина равна 1 м.
10. Система по п. 1, в которой первая и вторая антенны соединены с транспортным средством вдоль поперечной оси транспортного средства.
11. Система по п. 9, в которой устройство обработки данных дополнительно сконфигурировано с возможностью определения курсового угла (α) и точности (σα) в виде:
где N и Е означают, соответственно, северную и восточную составляющие базы, и и означают соответствующие дисперсии.
12. Система по п. 10, в которой устройство обработки данных дополнительно сконфигурировано с возможностью определения угла крена (φ) в виде:
где U означает составляющую вертикального смещения.
13. Система по п. 11, в которой устройство обработки данных дополнительно сконфигурировано с возможностью применения функции расширения для повышения точности, когда базовая длина меньше, чем некоторая пороговая длина, чтобы отразить линеаризованные ошибки для виртуального базового измерения базовой длины.
14. Система по п. 12, в которой упомянутая некоторая пороговая длина равна 1 м.
15. Система по п. 1, в которой устройство обработки данных сконфигурировано с возможностью применения уравнения двойной разности к измеренным фазам несущих и псевдодальностям первых и вторых сигналов перед применением фильтра компенсации погрешности к измеренным фазам несущих и псевдодальностям первых и вторых сигналов.
16. Система по п. 1, дополнительно содержащая декодер для декодирования псевдокодов, закодированных в первых сигналах и вторых сигналах, чтобы оценивать псевдодальности между каждой из антенн и соответствующими спутниками, приспособленными передавать первые и вторые сигналы.
17. Система по п. 1, в которой упомянутый диапазон или предварительно заданное количество возможных наборов решений неоднозначности составляет от 30 до 40.
18. Система по п. 1, в которой устройство обработки данных сконфигурировано с возможностью вычисления фиксированного решения (Xfix) для каждого возможного набора решений неопределенности с использованием следующего уравнения:
19. Система по п. 18, в которой упомянутое ограничивающее условие, которое должно быть удовлетворено для предварительно заданного количества возможных наборов решений неоднозначности, представляет собой:
ограничивающее условие по упомянутой известной базовой длине, в дополнение к расчетному допуску;
ограничивающее условие по известной базовой угловой пространственной ориентации, в дополнение к расчетному допуску;
плавающую 3-мерную базовую оценку (Xfloat), соответствующую плавающей неопределенности (Nf);
фиксированное решение (Xfix), вычисляемое с использованием корректировочной матрицы А(3×(Nf)).
20. Система по п. 19, в которой устройство обработки данных сконфигурировано с возможностью не обеспечивать фиксированного решения (Xfix), если отсутствует или существует только одно из упомянутого предварительно заданного количества возможных наборов решений неопределенности, удовлетворяющее упомянутому ограничивающему условию.
21. Система по п. 1, в которой устройство обработки данных сконфигурировано с возможностью сохранения в памяти упомянутого диапазона или предварительно заданного количества возможных наборов решений неопределенности.
22. Способ определения курсового угла транспортного средства, содержащий этапы, на которых:
измеряют фазы несущих для несущих, соответствующих первым сигналам и вторым сигналам, принятым, соответственно, первой антенной и второй антенной, связанным с входным каскадом приемника;
определяют наборы решений неопределенности для измеренных фаз несущих, используя известную базовую длину между первой антенной и второй антенной, чтобы удовлетворить ограничивающим условиям по постоянной длине и угловой пространственной ориентации в процессе поиска в кинематическом механизме поиска в реальном времени;
определяют предварительно заданное количество или диапазон количеств наборов решений неопределенности для первых и вторых сигналов из первой и второй антенн путем применения процесса поиска неопределенности;
применяют процесс фильтрации к измеренным фазам несущих и наборам решений неопределенности, соответствующим первым сигналам и вторым сигналам, причем процесс фильтрации использует известную базовую длину между первой антенной и второй антенной в качестве виртуального измерения;
оценивают местоположения первой антенны и второй антенны, используя фильтрованные фазы несущих и фильтрованные наборы решений неопределенности первых сигналов и вторых сигналов; и
определяют курсовой угол транспортного средства или его оборудования на основе оценок местоположений первой антенны и второй антенны.
23. Способ по п. 22, в котором вес виртуального измерения пропорционален дисперсии положения.
24. Способ по п. 22, в котором этап применения содержит применение процесса фильтрации калмановским фильтром, который использует разложение в ряд Тейлора первого порядка.
25. Способ по п. 22, дополнительно содержащий этап, на котором изменяют дисперсии виртуального измерения на основе точности плавающего решения после того, как измерены и фазы несущих, и псевдодальности.
| US6754584 B2, 22.06.2004 | |||
| US7298319 B2, 20.11.2007 | |||
| US4963889 A, 16.10.1990 | |||
| US5757646 A, 26.05.1998 | |||
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2272255C1 |
| US6268804 B1, 31.07.2001 | |||
| US2010039318 A, 18.02.2010 | |||

