Предлагаются способ для измерения износа рельса и система оценки для измерения износа рельса.
Прохождение рельсовых транспортных средств ведет к износу рельсов. Вследствие контакта между колесами рельсовых транспортных средств и рельсом материал рельса снимается. Кроме того, могут возникать задир или трещины.
Колесные датчики для регистрации рельсовых транспортных средств типично устанавливаются на рельсы таким образом, что они не касаются колес проходящих рельсовых транспортных средств. Это означает, что колесные датчики работают бесконтактным образом.
Со временем форма рельсов может изменяться вследствие износа и задира рельсов. Износ рельсов зависит от множества факторов, таких как, например, число, длина, вес, скорость, ускорение и замедление проходящих рельсовых транспортных средств. Износ рельса может вести к уменьшенному расстоянию между колесным датчиком и колесами проходящих рельсовых транспортных средств. Для того, чтобы избегать повреждения колесного датчика, необходимо измерять износ рельса. Если расстояние между колесами проходящего рельсового транспортного средства и колесным датчиком падает ниже порогового значения, необходимо снижать позицию колесного датчика для того, чтобы предотвратить повреждение колесного датчика.
Состояние рельсов может быть определено посредством ручных или автоматических измерений с помощью специальных измерительных приборов или инструментов. Эти измерения должны выполняться в местоположении рельса. Следовательно, измерения могут быть затратными по времени и стоимости. Тем не менее, необходимо определять состояние рельсов с регулярными интервалами.
Целью является предоставление способа для измерения износа рельса с улучшенной эффективностью. Дополнительной целью является предоставление системы оценки для измерения износа рельса с улучшенной эффективностью.
Эти цели достигаются с помощью независимых пунктов формулы изобретения. Дополнительные варианты осуществления являются предметом зависимых пунктов формулы изобретения.
Согласно, по меньшей мере, одному варианту осуществления способа для измерения износа рельса, способ содержит этап регистрации первого набора колесных сигналов посредством колесного датчика, установленного на рельс. Первый набор колесных сигналов содержит множество колесных сигналов. Колесные сигналы могут быть выходными сигналами колесного датчика. Колесный датчик конфигурируется для регистрации присутствия колеса рельсового транспортного средства вблизи колесного датчика. Первый набор колесных сигналов может быть фиксированным числом колесных сигналов. Колесные сигналы первого набора колесных сигналов регистрируются друг за другом. Колесные сигналы первого набора колесных сигналов могут регистрироваться непосредственно друг за другом. Предпочтительно, первый набор колесных сигналов регистрируется непосредственно после настройки и калибровки колесного датчика.
Колесный сигнал регистрируется, когда колесо рельсового транспортного средства проходит колесный датчик. Это означает, что каждый колесный сигнал относится к присутствию колеса рельсового транспортного средства вблизи колесного датчика. Колесный датчик является бесконтактным датчиком, который не находится в непосредственном контакте с колесами рельсового транспортного средства во время измерения. Следовательно, колесный датчик конфигурируется, чтобы регистрировать то, присутствует ли колесо рельсового транспортного средства вблизи колесного датчика. Колесный датчик может дополнительно быть сконфигурирован, чтобы регистрировать, проходит ли рельсовое транспортное средство позицию колесного датчика.
Когда колесо рельсового транспортного средства проходит колесный датчик, регистрируется колесный сигнал. Для следующего колеса того же рельсового транспортного средства регистрируется другой колесный сигнал. Это означает, что каждый колесный сигнал относится к прохождению колеса.
Колесный датчик может содержать индуктивный датчик. Индуктивный датчик может быть выполнен для регистрации изменения магнитного поля, индуцируемого металлом, движущимся в магнитном поле. Металл, движущийся в магнитном поле, может быть колесом рельсового транспортного средства. Для каждого изменения магнитного поля колесный датчик регистрирует колесный сигнал. Амплитуда колесного сигнала относится к изменению магнитного поля. Следовательно, амплитуды колесных сигналов, относящихся к различным колесам, могут отличаться друг от друга.
Способ дополнительно содержит этап определения первого усредненного колесного сигнала для первого набора колесных сигналов. Первый усредненный колесный сигнал для первого набора колесных сигналов определяется посредством усреднения всех колесных сигналов из первого набора колесных сигналов. Это означает, что определяется среднее значение для колесных сигналов из первого набора колесных сигналов.
Способ дополнительно содержит этап регистрации, по меньшей мере, одного второго набора колесных сигналов посредством колесного датчика, когда второй набор колесных сигналов регистрируется после регистрации первого набора колесных сигналов. Второй набор колесных сигналов содержит множество колесных сигналов. Второй набор колесных сигналов может быть фиксированным числом колесных сигналов. Колесные сигналы второго набора колесных сигналов регистрируются друг за другом. Колесные сигналы второго набора колесных сигналов могут регистрироваться непосредственно друг за другом. Все колесные сигналы из второго набора колесных сигналов регистрируются после регистрации первого набора колесных сигналов.
Если более чем один второй набор колесных сигналов регистрируется, колесный сигнал может состоять из нескольких вторых наборов колесных сигналов. Это означает, что вторые наборы колесных сигналов могут перекрываться.
Альтернативно, вторые наборы колесных сигналов не перекрываются, и каждый колесный сигнал состоит только из одного набора колесных сигналов.
Способ дополнительно содержит этап определения второго усредненного колесного сигнала для второго набора колесных сигналов. Второй усредненный колесный сигнал для второго набора колесных сигналов определяется посредством усреднения всех колесных сигналов из второго набора колесных сигналов. Это означает, что определяется среднее значение для колесных сигналов из второго набора колесных сигналов.
Способ дополнительно содержит этап определения разностного сигнала, предоставленного посредством разности между вторым усредненным колесным сигналом и первым усредненным колесным сигналом. Если первый усредненный колесный сигнал и второй усредненный колесный сигнал содержат несколько значений, соответственно, для определения разностного сигнала для каждого из этих значений определяется разница.
Способ для измерения износа рельса предоставляет возможность определять состояние износа рельса. Первый набор колесных сигналов может быть определен после того, как колесный датчик настроен и откалиброван. Это означает, что во время регистрации первого набора колесных сигналов рельс является относительно новым и показывает ничтожные следы износа. Следовательно, первый набор колесных сигналов применяется в качестве эталонного значения. Требуется записывать множество колесных сигналов в качестве первого набора колесных сигналов, поскольку колеса различных рельсовых транспортных средств ведут к различным колесным сигналам. Для того, чтобы перевешивать различия между различными колесами, проходящими колесный датчик, определяется первый усредненный колесный сигнал. Это означает, что первый усредненный колесный сигнал является усредненным колесным сигналом для состояния рельса, когда износ является ничтожным.
Поскольку второй набор колесных сигналов регистрируется после регистрации первого набора колесных сигналов, второй набор колесных сигналов регистрируется в то время, когда износ увеличивается в сравнении со временем, в течение которого регистрируется первый набор колесных сигналов. С увеличением износа рельса расстояние между колесным датчиком и колесом проходящего рельсового транспортного средства уменьшается. Поскольку амплитуда колесного сигнала зависит от расстояния между колесным датчиком и колесом, износ рельса может быть определен из колесных сигналов. С увеличением износа рельса абсолютное значение колесного сигнала увеличивается.
Посредством определения разностного сигнала определяется разница между первым усредненным колесным сигналом, который означает состояние ничтожного износа рельса, и вторым усредненным колесным сигналом, который означает состояние увеличившегося износа рельса. Следовательно, разностный сигнал является показателем износа рельса.
Преимущественно, способ предоставляет возможность определять износ рельса из колесных сигналов, зарегистрированных посредством колесных датчиков. Колесные датчики типично размещаются на рельсе для наблюдения за трафиком рельсовых транспортных средств. Таким образом, для измерения износа рельсов не требуется экстраординарное оборудование. Колесные сигналы, которые регистрируются для наблюдения за трафиком рельсовых транспортных средств, также применяются для определения износа рельса. Кроме того, ручной осмотр рельсов не требуется. Нет необходимости двигаться к местоположению рельса для того, чтобы определять его состояние износа. Следовательно, способ предоставляет возможность эффективного измерения износа рельса. Кроме того, способ предоставляет возможность улучшенного технического обслуживания рельсов, поскольку состояние рельсов может наблюдаться непрерывно.
Согласно, по меньшей мере, одному варианту осуществления способа, первый набор колесных сигналов и, по меньшей мере, один второй набор колесных сигналов содержат одинаковое число колесных сигналов. Это означает, что для определения первого усредненного колесного сигнала и второго усредненного колесного сигнала соответственно усредняется одинаковое число колесных сигналов. Следовательно, различные свойства первого набора колесных сигналов и второго набора колесных сигналов могут быть легко сравнены, как, например, среднеквадратическое отклонение.
Согласно, по меньшей мере, одному варианту осуществления способа, первый набор колесных сигналов и, по меньшей мере, один второй набор колесных сигналов содержат, по меньшей мере, десять колесных сигналов, соответственно. Дополнительно является возможным то, что первый набор колесных сигналов и второй набор колесных сигналов содержат, по меньшей мере, 1000 колесных сигналов, соответственно. Дополнительно является возможным то, что первый набор колесных сигналов и второй набор колесных сигналов содержат, по меньшей мере, 10000 колесных сигналов, соответственно. Число колесных сигналов для первого набора колесных сигналов и второго набора колесных сигналов определяется согласно типу рельса и числу различных рельсовых транспортных средств, проходящих по рельсу. Если только один тип рельсовых транспортных средств проходит по рельсу, меньшее число колесных сигналов требуется для получения усредненного колесного сигнала по сравнению со случаем, когда множество различных типов рельсовых транспортных средств проходит по рельсу. Число колесных сигналов для первого набора колесных сигналов и второго набора колесных сигналов выбирается таким образом, что различия между разными типами колес перевешивают друг друга.
Согласно, по меньшей мере, одному варианту осуществления способа, первый усредненный колесный сигнал является опорным сигналом для состояния отсутствия или известного износа рельса. Это означает, что первый набор колесных сигналов регистрируется во время, когда рельс имеет ничтожный износ. Альтернативно, первый набор колесных сигналов регистрируется во время, когда рельс показывает известное состояние износа. Все колесные сигналы, зарегистрированные после регистрации первого набора колесных сигналов, регистрируются во время, когда износ рельса увеличивается в сравнении со временем, когда регистрируется первый набор колесных сигналов. Следовательно, первый усредненный колесный сигнал является опорным сигналом. Это означает, что преимущественно состояние износа рельса может быть определено из колесных сигналов колесного датчика. Дополнительное оборудование на рельсе не требуется.
Согласно, по меньшей мере, одному варианту способа, разностный сигнал относится к состоянию износа рельса. Разностный сигнал дает разницу между первым усредненным колесным сигналом, который является опорным сигналом для состояния отсутствия или известного износа рельса, и вторым усредненным колесным сигналом, который относится к колесным сигналам, которые регистрируются после регистрации первого набора колесных сигналов. Следовательно, второй усредненный колесный сигнал относится к состоянию увеличенного износа рельса в сравнении с первым усредненным колесным сигналом. Чем большим является разностный сигнал, тем большим является износ рельса. Это означает, что преимущественно состояние износа рельса может быть определено из колесных сигналов колесного датчика. Дополнительное оборудование на рельсе не требуется.
Согласно, по меньшей мере, одному варианту осуществления способа, множество разностных сигналов определяется для разниц между множеством вторых усредненных колесных сигналов и первым усредненным колесным сигналом. Для каждого второго набора колесных сигналов определяется второй усредненный колесный сигнал. Для каждого второго усредненного колесного сигнала определяется разностный сигнал, предоставленный посредством разности между соответствующим вторым усредненным колесным сигналом и первым усредненным колесным сигналом. Это означает, что для каждого второго набора колесных сигналов может быть определено состояние износа рельса. Таким образом, состояние рельса может наблюдаться непрерывно.
Согласно, по меньшей мере, одному варианту осуществления способа, предоставляется выходной сигнал, если разностный сигнал больше предварительно определенного порогового значения. Пороговое значение может быть указателем того, что износ рельса является настолько большим, что колесный датчик должен быть опущен для того, чтобы избегать повреждения колесного датчика проходящими колесами. Это означает, что, если разностный сигнал больше порогового значения, расстояние между колесами проходящих рельсовых транспортных средств и колесным датчиком уменьшается в сравнении с первоначальной установкой колесного датчика. Пороговое значение может быть предварительно определено таким образом, что выходной сигнал указывает, что колесный датчик должен быть опущен для того, чтобы избежать повреждения. Следовательно, выходной сигнал преимущественно является указателем состояния износа рельса, который является критическим для колесного датчика.
Пороговое значение может быть определено через экстраполяцию между двумя точками измерения на рельсе. С этой целью расстояние между колесным датчиком и колесом на рельсе определяется в два различных момента времени. Кроме того, для этих двух различных моментов времени определяется разница между вторыми усредненными сигналами колес. Это означает, что значение разностного сигнала может быть сопоставлено с изменениями в расстоянии между колесным датчиком и колесом. Уменьшение расстояния между колесным датчиком и колесом затем экстраполируется в будущее.
Другой возможностью определения порогового значения является оценка износа рельса со временем на основе предыдущих измерений на рельсе и на основе предыдущих временных интервалов, в которые рельсы должны быть заменены.
Согласно, по меньшей мере, одному варианту осуществления способа, первый усредненный колесный сигнал содержит усредненное значение максимальной амплитуды колесных сигналов для первого набора колесных сигналов. Каждый колесный сигнал содержит максимальное значение амплитуды. Максимальное значение амплитуды зависит от расстояния между колесным датчиком и проходящим колесом. Следовательно, максимальное значение амплитуды зависит от износа рельса. Посредством определения первого усредненного колесного сигнала определяется среднее максимальных значений амплитуд колесных сигналов для первого набора колесных сигналов. Таким образом, первый усредненный колесный сигнал может быть связан с состоянием ничтожного износа рельса и с расстоянием между колесным датчиком и колесом в этом состоянии.
Согласно, по меньшей мере, одному варианту осуществления способа, второй усредненный колесный сигнал содержит усредненное значение максимальной амплитуды колесных сигналов из второго набора колесных сигналов. Каждый колесный сигнал содержит максимальное значение амплитуды. Максимальное значение амплитуды зависит от расстояния между колесным датчиком и проходящим колесом. Следовательно, максимальное значение амплитуды зависит от износа рельса. Посредством определения второго усредненного колесного сигнала определяется среднее максимальных значений амплитуд колесных сигналов из второго набора колесных сигналов. Таким образом, второй усредненный колесный сигнал может относиться к состоянию увеличенного износа в сравнении со временем, когда регистрируется первый набор колесных сигналов. Второй усредненный колесный сигнал может дополнительно быть связан с уменьшенным расстоянием между колесным датчиком и колесом в сравнении с состоянием без износа рельса.
Согласно, по меньшей мере, одному варианту осуществления способа промежуточные вторые усредненные колесные сигналы для поднаборов второго набора колесных сигналов определяются посредством колесного датчика, и второй усредненный колесный сигнал определяется посредством блока оценки из промежуточных вторых усредненных колесных сигналов. Второй набор колесных сигналов содержит, по меньшей мере, два поднабора колесных сигналов. Каждый из поднаборов содержит, по меньшей мере, два колесных сигнала. Например, каждый поднабор содержит восемь колесных сигналов. Второй набор колесных сигналов может содержать восемь поднаборов колесных сигналов. Для каждого поднабора колесных сигналов промежуточный второй усредненный колесный сигнал определяется посредством колесного датчика. Промежуточный второй усредненный колесный сигнал определяется посредством усреднения всех колесных сигналов из поднабора колесных сигналов. Это означает, что определяется среднее значение колесных сигналов из одного поднабора колесных сигналов. Промежуточный второй усредненный колесный сигнал может быть определен посредством сложения колесных сигналов из поднабора колесных сигналов и посредством деления этого значения на число колесных сигналов из поднабора колесных сигналов. Второй усредненный колесный сигнал определяется посредством усреднения всех промежуточных вторых усредненных колесных сигналов. Это означает, что среднее значение промежуточных вторых усредненных колесных сигналов определяется для определения второго усредненного колесного сигнала.
Поскольку промежуточные вторые усредненные колесные сигналы определяются посредством колесного датчика, требуется только предоставлять промежуточные вторые усредненные колесные сигналы блоку оценки для дополнительной оценки, а не все колесные сигналы из поднаборов колесных сигналов. Следовательно, объем данных, которые должны быть переданы, уменьшается.
Согласно, по меньшей мере, одному варианту осуществления способа, второй набор колесных сигналов предоставляется блоку оценки, где определяется второй усредненный колесный сигнал. Это означает, что все колесные сигналы из второго набора колесных сигналов предоставляются блоку оценки. Усреднение не имеет место в колесном датчике. Следовательно, блок для определения усредненных колесных сигналов не требуется в колесном датчике.
Кроме того, предоставляется система оценки для измерения износа рельса. Система оценки может предпочтительно быть использована в способах, описанных в данном документе. Это означает, что все признаки, раскрытые для способа для измерения износа рельса, также раскрываются для системы оценки и наоборот.
По меньшей мере, в одном варианте осуществления системы оценки для измерения износа рельса, система оценки содержит вход для приема сигналов от, по меньшей мере, одного колесного датчика, установленного на рельсе. Вход может быть сконфигурирован, чтобы принимать колесные сигналы, зарегистрированные посредством колесного датчика. Дополнительно является возможным, что вход конфигурируется, чтобы принимать промежуточные вторые усредненные колесные сигналы и/или вторые усредненные колесные сигналы. Вход может быть дополнительно сконфигурирован, чтобы принимать первый усредненный колесный сигнал. Система оценки может быть соединена, по меньшей мере, с одним колесным датчиком.
Система оценки дополнительно содержит блок памяти, где сохраняется первый усредненный колесный сигнал для первого набора колесных сигналов. После того как первый усредненный колесный сигнал определяется, он сохраняется в блоке памяти.
Система оценки дополнительно содержит блок усреднения, который конфигурируется, чтобы определять второй усредненный колесный сигнал для второго набора колесных сигналов. Блок усреднения соединяется со входом. Второй усредненный колесный сигнал для второго набора колесных сигналов определяется посредством усреднения всех колесных сигналов из второго набора колесных сигналов. Это означает, что определяется среднее значение для колесных сигналов из второго набора колесных сигналов. Колесные сигналы из второго набора колесных сигналов предоставляются блоку усреднения через вход. Блок усреднения может содержать центральный процессор. Центральный процессор может быть сконфигурирован, чтобы определять второй усредненный колесный сигнал.
Система оценки дополнительно содержит блок сравнения, который конфигурируется, чтобы определять разностный сигнал, предоставляемый посредством разности между вторым усредненным колесным сигналом и первым усредненным колесным сигналом. Блок сравнения соединяется с блоком памяти и блоком усреднения. Блок сравнения конфигурируется, чтобы принимать первый усредненный колесный сигнал из блока памяти. Блок сравнения дополнительно конфигурируется, чтобы принимать второй усредненный колесный сигнал от блока усреднения. Блок сравнения может содержать центральный процессор для определения разностного сигнала.
Каждый колесный сигнал относится к колесу рельсового транспортного средства, проходящему колесный датчик. Это означает, что каждый раз, когда колесо рельсового транспортного средства проходит колесный датчик, регистрируется колесный сигнал.
Посредством использования системы оценки может быть определено состояние износа рельса. Состояние износа рельса определяется из колесных сигналов, зарегистрированных, по меньшей мере, одним колесным датчиком. Следовательно, преимущественно другое оборудование или инструменты не требуются для определения износа рельса. Это означает, что износ рельса может быть измерен с улучшенной эффективностью посредством системы оценки.
По меньшей мере, в одном варианте осуществления системы оценки система оценки дополнительно содержит выход для предоставления выходного сигнала, если разностный сигнал больше предварительно определенного порогового значения. С этой целью, система оценки содержит дополнительный блок сравнения. Дополнительный блок сравнения конфигурируется, чтобы сравнивать разностный сигнал с предварительно определенным пороговым значением. Предварительно определенное пороговое значение сохраняется в блоке памяти. Дополнительный блок сравнения соединяется с блоком сравнения и с блоком памяти. Пороговое значение может быть указателем того, что износ рельса является настолько большим, что колесный датчик должен быть опущен для того, чтобы избежать повреждения колесного датчика проходящими колесами. Пороговое значение может быть предварительно определено таким образом, что выходной сигнал указывает, что колесный датчик должен быть опущен для того, чтобы избежать повреждения. Следовательно, выходной сигнал преимущественно является указателем состояния износа рельса, который является критическим для колесного датчика.
По меньшей мере, в одном варианте осуществления системы оценки блок усреднения содержит блок оценки, который конфигурируется, чтобы определять второй усредненный колесный сигнал. Блок оценки может быть центральным блоком, который не располагается вблизи колесных датчиков. Блок оценки может быть сконфигурирован, чтобы принимать второй набор колесных сигналов для определения второго усредненного колесного сигнала. В этом случае, оценка колесных сигналов не должна выполняться посредством колесного датчика. Следовательно, настройка колесного датчика может быть простой и надежной.
По меньшей мере, в одном варианте осуществления системы оценки блок усреднения содержит колесный датчик и блок оценки, при этом колесный датчик содержит дополнительный блок усреднения, который конфигурируется, чтобы определять промежуточные вторые усредненные колесные сигналы из поднаборов второго набора колесных сигналов, и при этом колесный датчик соединяется с блоком оценки. Блок усреднения может содержать множество колесных датчиков, установленных в различных позициях на рельсе. Дополнительный блок усреднения может содержать микропроцессор, который конфигурируется, чтобы определять промежуточные вторые усредненные колесные сигналы. Колесный датчик может содержать выход, который конфигурируется, чтобы предоставлять промежуточные вторые усредненные колесные сигналы. Блок оценки может содержать вход, где промежуточные вторые усредненные колесные сигналы могут быть приняты. Блок оценки может быть центральным блоком, который не размещается вблизи колесных датчиков. Поскольку промежуточные вторые усредненные колесные сигналы определяются посредством колесного датчика, требуется только предоставлять промежуточные вторые усредненные колесные сигналы блоку оценки для дополнительной оценки, а не все колесные сигналы из поднаборов колесных сигналов. Следовательно, объем данных, которые должны быть переданы, уменьшается.
Последующее описание чертежей может дополнительно иллюстрировать и объяснять примерные варианты осуществления. Компоненты, которые являются функционально идентичными или имеют идентичное действие, обозначаются идентичными ссылками. Идентичные или действенно идентичные компоненты могут быть описаны только со ссылкой на чертежи, где они появляются впервые. Их описание необязательно повторяется на последующих чертежах.
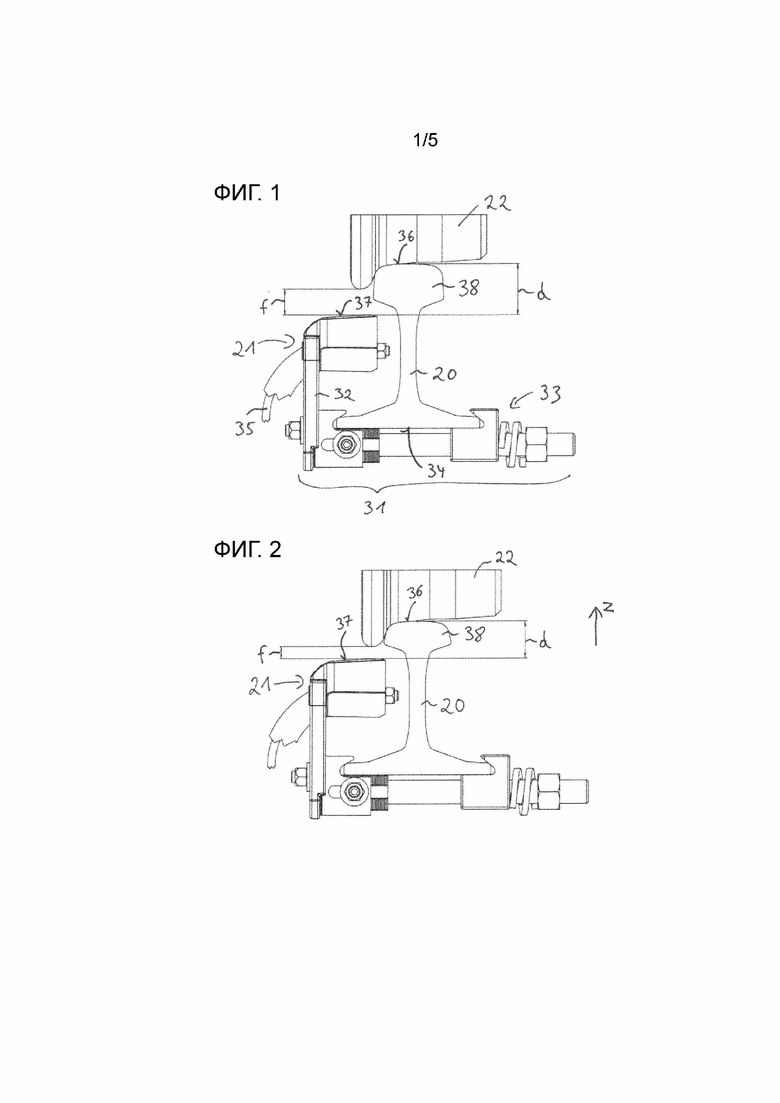
Фиг. 1 и 2 показывают виды сбоку примерного варианта осуществления колесного датчика, установленного на рельс.
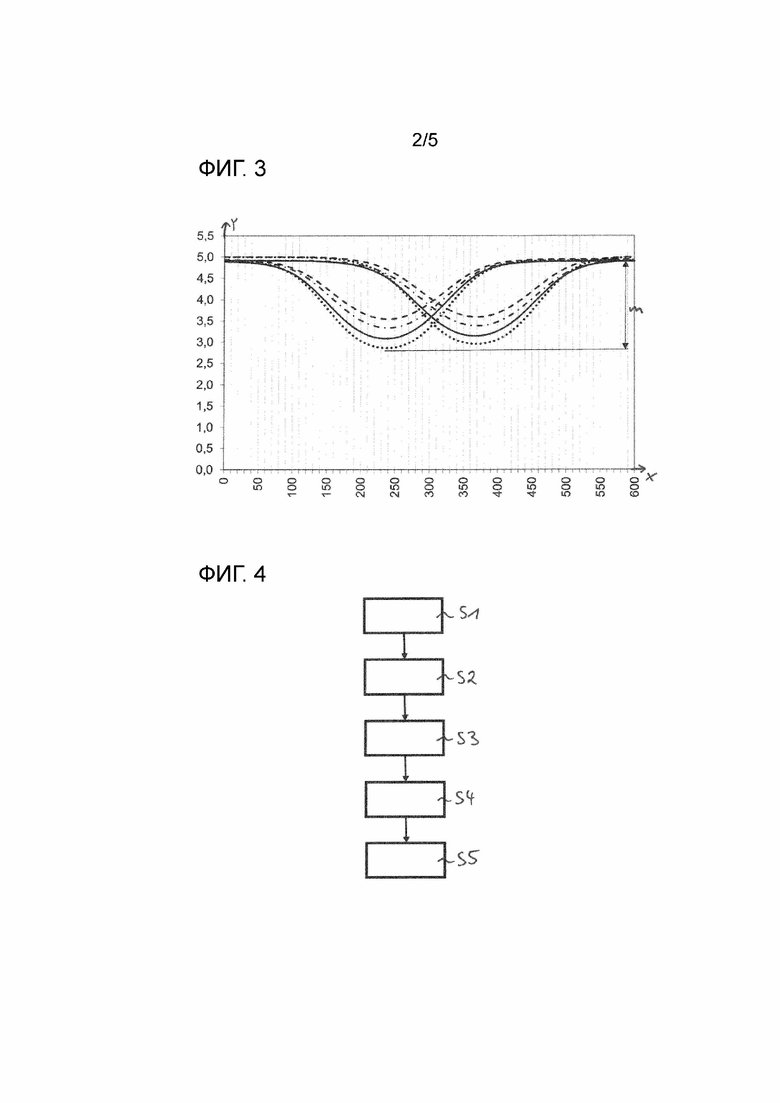
На фиг. 3 нанесены кривые примерных колесных сигналов.
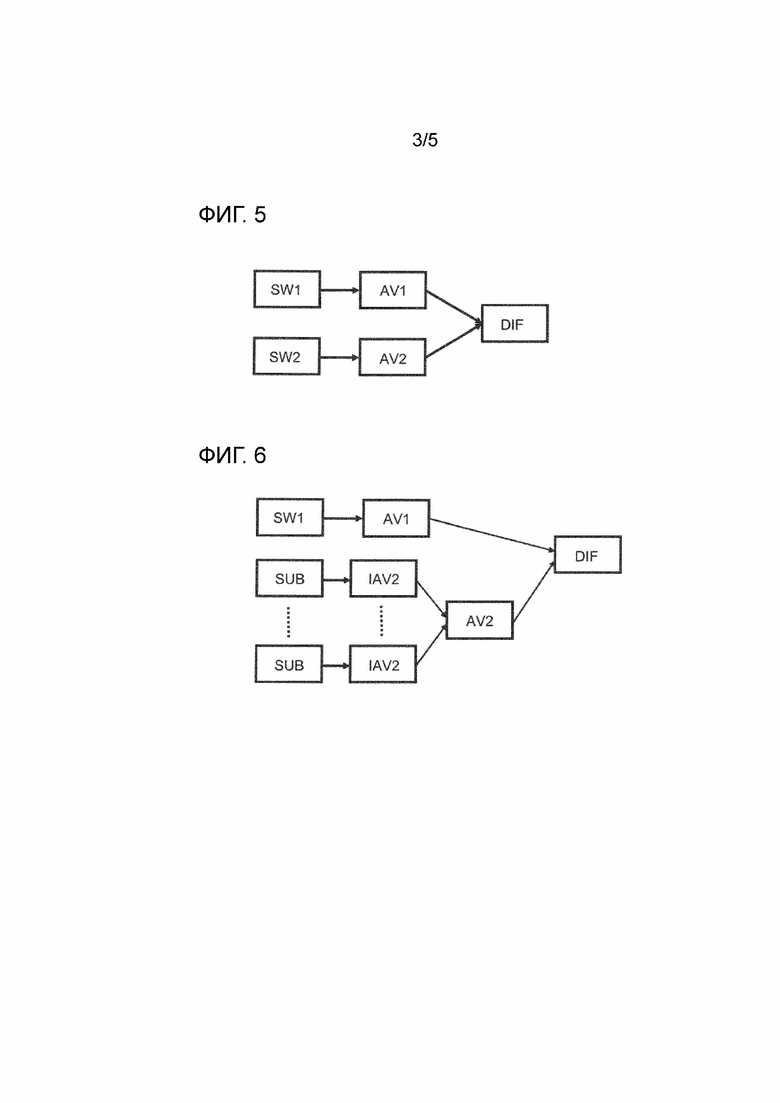
Фиг. 4, 5 и 6 схематично показывают примерные варианты осуществления способа для измерения износа рельса.
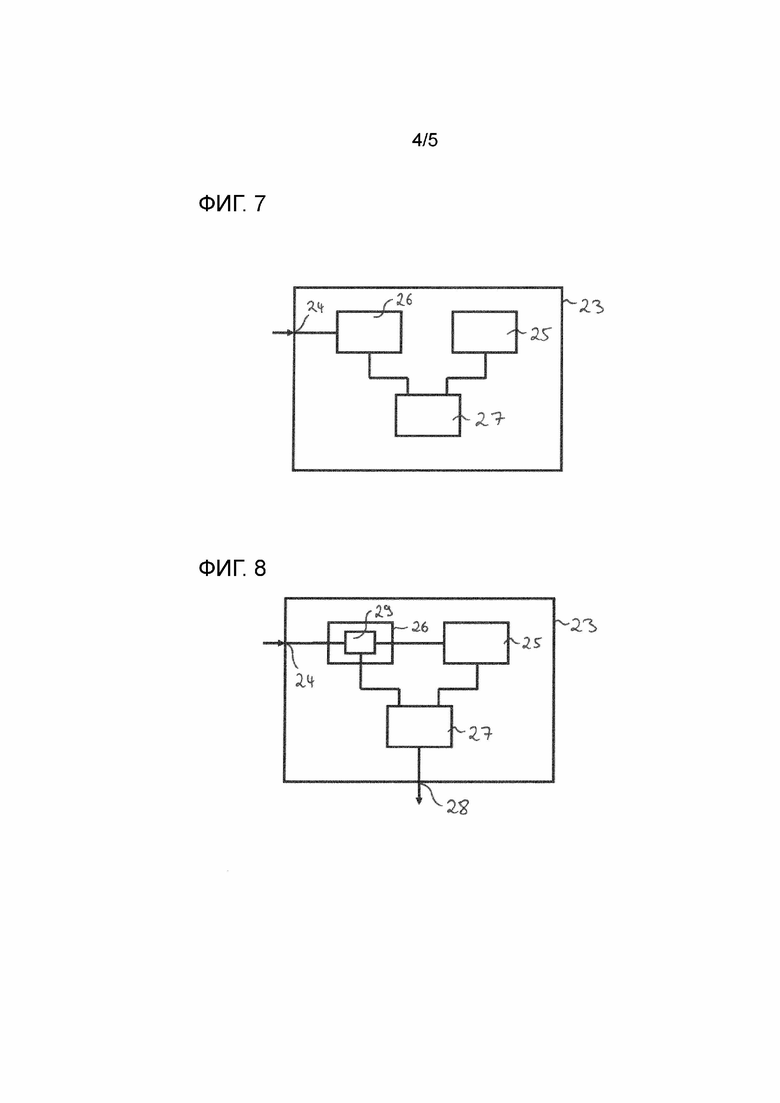
Фиг. 7, 8, 9 и 10 показывают примерные варианты осуществления системы оценки для измерения износа рельса.
На фиг. 1 показан вид сбоку примерного варианта осуществления колесного датчика 21. Колесный датчик 21 устанавливается на рельс 20. Колесный датчик 21 устанавливается на рельс 20 посредством монтажной системы 31. Монтажная система 31 содержит несущий элемент 32, на который устанавливается колесный датчик 21. Несущий элемент 32 соединяется с зажимом 33, который протягивается под рельсом 20. Зажим 33 прикрепляется к рельсу 20 на нижней стороне 34 рельса 20, когда нижняя сторона 34 обращена от стороны, где могут располагаться колеса 22 проходящих рельсовых транспортных средств. Колесный датчик 21 снабжается энергией через кабель 35, соединенный с колесным датчиком 21.
На фиг. 1 показано поперечное сечение рельса 20. На верхней поверхности 36 рельса 20 располагается колесо 22 рельсового транспортного средства. Фиг. 1 показывает только часть колеса 22. Верхняя поверхность 36 рельса 20 обращена от нижней стороны 34. Верхняя поверхность 36 рельса 20 размещается на верхней части 38 рельса 20.
В ситуации на фиг. 1 рельс 20 является относительно новым. Следовательно, износом рельса 20 можно пренебречь. На этой первоначальной стадии верхняя поверхность 36 разнесена от верхней стороны 37 колесного датчика 21 на расстояние d. Верхняя сторона 37 колесного датчика 21 разнесена от реборды колеса для колеса 22 на расстояние f. Колесный датчик 21 устанавливается на рельс 20 таким образом, что колеса 22 проходящих рельсовых транспортных средств не касаются колесного датчика 21.
Фиг. 2 показывает другой вид сбоку примерного варианта осуществления колесного датчика 21. В сравнении с ситуацией, показанной на фиг. 1, в этом случае рельс 20 использовался в течение некоторого времени, так что рельс 20 показывает износ. Это означает что высота верхней части 38 рельса 20 уменьшилась. Посредством большого числа рельсовых транспортных средств, проходящих по рельсу 20, часть верхней части 38 снимается, так что толщина верхней части 38 уменьшается. Это означает, что износ рельса 20 имеет место в вертикальном направлении z. Следовательно, также расстояние d между верхней поверхностью 36 рельса 20 и верхней стороной 37 колесного датчика 21 уменьшается в сравнении с ситуацией, показанной на фиг. 1. Расстояние f между ребордой колеса и верхней стороной 37 колесного датчика 21 также уменьшается. Для того, чтобы избегать повреждения колесного датчика 21 колесами 22 проходящих рельсовых транспортных средств, необходимо опускать позицию колесного датчика 21 относительно верхней поверхности 36 рельса 20.
На фиг. 3 нанесены кривые примеров колесных сигналов. По x-оси расстояние нанесено в мм. По y-оси ток нанесен в мА. Колесный датчик 21 содержит два датчика, которые, каждый, являются индуктивными датчиками. Изменение в токе, нанесенном по y-оси, указывает перемещение электропроводящего материала вблизи колесного датчика 21. Таким образом, может быть зарегистрировано присутствие колеса 22 рельсового транспортного средства. Каждый из датчиков регистрирует один колесный сигнал для каждого колеса 22. Каждый колесный сигнал содержит множество значений амплитуды, которые нанесены по y-оси на фиг. 3. Кроме того, каждый колесный сигнал имеет максимальное значение амплитуды. Максимальное значение амплитуды является значением, которое отличается наиболее от значения для ситуации, когда колесо 22 не присутствует рядом с колесным датчиком 21. Другими словами, максимальное значение амплитуды является значением колесного сигнала, которое отличается наиболее от первоначального значения. Для первого из двух датчиков колесный сигнал падает примерно при 250 мм. Падение колесного сигнала относится к колесу 22, проходящему колесный датчик 21. Максимальное значение амплитуды в этом случае является наименьшим значением по y-оси каждого колесного сигнала соответственно. Для второго из двух датчиков колесный сигнал падает примерно при 350 мм. Поскольку первый датчик устанавливается разнесенным на расстояние от второго датчика, колесные сигналы для двух различных датчиков падают при различных расстояниях.
На фиг. 3 для каждого из двух датчиков колесные сигналы нанесены в виде кривой для различных моментов времени. Штриховые линии относятся к состоянию, когда рельс 20 является относительно новым, и износ рельса 20 является ничтожным. Другие три сигнала колес регистрируются после этого первого колесного сигнала. Штрихпунктирные линии относятся к состоянию повышенного износа рельса 20 в сравнении с состоянием для штриховой линии. Пунктирные линии относятся к состоянию максимального износа рельса 20. Максимальная амплитуда колесных сигналов является различной для различных состояний износа рельса 20. Это означает, что максимальная амплитуда колесных сигналов может быть связана с состоянием износа рельса 20. На фиг. 3, в качестве примера максимальная амплитуда m показана для пунктирной линии, это означает состояние максимального износа рельса 20.
Фиг. 4 схематично показывает примерный вариант осуществления способа измерения износа рельса 20. Первый этап S1 способа содержит регистрацию первого набора колесных сигналов SW1 колес посредством колесного датчика 21, установленного на рельс 20. В каждом случае, колесный сигнал регистрируется, когда колесо 22 рельсового транспортного средства проходит колесный датчик 21. На втором этапе S2 способа определяется первый усредненный колесный сигнал AV1 для первого набора колесных сигналов SW1. Первый усредненный колесный сигнал AV1 содержит усредненное значение максимальной амплитуды колесных сигналов для первого набора колесных сигналов SW1. Первый усредненный колесный сигнал AV1 является опорным сигналом для состояния без или с известным износом рельса 20. Третий этап S3 способа содержит регистрацию, по меньшей мере, одного второго набора колесных сигналов SW2 посредством колесного датчика 21, когда второй набор колесных сигналов SW2 регистрируется после регистрации первого набора колесных сигналов SW1. Первый набор колесных сигналов SW1 и второй набор колесных сигналов SW2 могут содержать одинаковое число колесных сигналов. Например, первый набор колесных сигналов SW1 и второй набор колесных сигналов SW2 содержат, по меньшей мере, 10 колесных сигналов, соответственно. На четвертом этапе S4 способа определяется второй усредненный колесный сигнал AV2 из второго набора колесных сигналов SW2. Второй усредненный колесный сигнал AV2 содержит усредненное значение максимальной амплитуды колесных сигналов из второго набора колесных сигналов SW2. Второй усредненный колесный сигнал AV2 может быть определен посредством блока 29 оценки, которому предоставляется второй набор колесных сигналов SW2. Пятый этап S5 способа содержит определение разностного сигнала DIF, предоставленного посредством разности между вторым усредненным колесным сигналом AV2 и первым усредненным колесным сигналом AV1. Разностный сигнал DIF относится к состоянию износа рельса 20. Дополнительно является возможным, что множество разностных сигналов DIF определяется для разностей между множеством вторых усредненных колесных сигналов AV2 и первым усредненным колесным сигналом AV1. На пятом этапе S5 выходной сигнал предоставляется, если разностный сигнал DIF больше предварительно определенного порогового значения.
Вместо предоставления второго набора колесных сигналов SW2 блоку 29 оценки и определения второго усредненного колесного сигнала AV2 посредством блока оценки могут быть зарегистрированы поднаборы SUB второго набора колесных сигналов SW2. Это означает, что колесный датчик 21 может быть сконфигурирован, для регистрации поднаборов SUB второго набора колесных сигналов SW2. Каждый поднабор SUB содержит, по меньшей мере, два колесных сигнала. Второй набор колесных сигналов SW2 может содержать несколько поднаборов SUB колесных сигналов. Колесный датчик 21 может быть сконфигурирован, чтобы определять промежуточные вторые усредненные сигналы IAV2 для поднаборов SUB второго набора колесных сигналов SW2. Это означает, что колесный датчик 21 конфигурируется, чтобы определять промежуточный второй усредненный колесный сигнал IAV2 для каждого поднабора SUB. Затем, второй усредненный колесный сигнал AV2 определяется из промежуточных вторых усредненных колесных сигналов IAV2 посредством блока 29 оценки.
Фиг. 5 схематично показывает примерный вариант осуществления способа измерения износа рельса 20. Первый набор колесных сигналов SW1 регистрируется посредством колесного датчика 21, и определяется первый усредненный колесный сигнал AV1 для первого набора колесных сигналов SW1. Затем, по меньшей мере, один второй набор колесных сигналов SW2 регистрируется посредством колесного датчика 21, и определяется второй усредненный колесный сигнал AV2 для второго набора колесных сигналов SW2. На следующем этапе определяется разностный сигнал DIF, предоставляемый посредством разности между вторым усредненным колесным сигналом AV2 и первым усредненным колесным сигналом AV1.
Фиг. 6 схематично показывает другой примерный вариант осуществления способа измерения износа рельса 20. В сравнении с вариантом осуществления, показанным на фиг. 5, второй усредненный колесный сигнал AV2 определяется по-другому. Поднаборы SUB для второго набора колесных сигналов SW2 регистрируются посредством колесного датчика 21. Для каждого поднабора SUB промежуточный второй усредненный колесный сигнал IAV2 определяется посредством колесного датчика 21. Затем, второй усредненный колесный сигнал AV2 определяется из промежуточных вторых усредненных колесных сигналов IAV2 посредством блока 29 оценки. На следующем этапе определяется разностный сигнал DIF, предоставляемый посредством разности между вторым усредненным колесным сигналом AV2 и первым усредненным колесным сигналом AV1.
Фиг. 7 показывает примерный вариант осуществления системы 23 оценки для измерения износа рельса 20. Система 23 оценки содержит вход 24 для приема сигналов, по меньшей мере, от одного колесного датчика 21, установленного на рельсе 20. Сигналы могут быть колесными сигналами. Каждый колесный сигнал относится к колесу 22 рельсового транспортного средства, проходящего колесный датчик 21. Система 23 оценки дополнительно содержит блок 25 памяти, где сохраняется первый усредненный колесный сигнал AV1 для первого набора колесных сигналов SW1. Система 23 оценки дополнительно содержит блок 26 усреднения, который конфигурируется, чтобы определять второй усредненный колесный сигнал AV2 для второго набора колесных сигналов SW2. Блок 26 усреднения соединяется с входом 24. Система 23 оценки дополнительно содержит блок 27 сравнения, который конфигурируется, чтобы определять разностный сигнал DIF, предоставляемый посредством разности между вторым усредненным колесным сигналом AV2 и первым усредненным колесным сигналом AV1. Блок 27 сравнения соединяется с блоком 25 памяти и блоком 26 усреднения.
Фиг. 8 показывает дополнительный примерный вариант осуществления системы 23 оценки. В сравнении с вариантом осуществления, показанным на фиг. 7, блок 26 усреднения содержит блок 29 оценки, который конфигурируется, чтобы определять второй усредненный колесный сигнал AV2. Блок 29 оценки соединяется с входом 24, с блоком 25 памяти и блоком 27 сравнения. Кроме того, система 23 оценки содержит выход 28 для предоставления выходного сигнала, если разностный сигнал DIF больше предварительно определенного порогового значения.
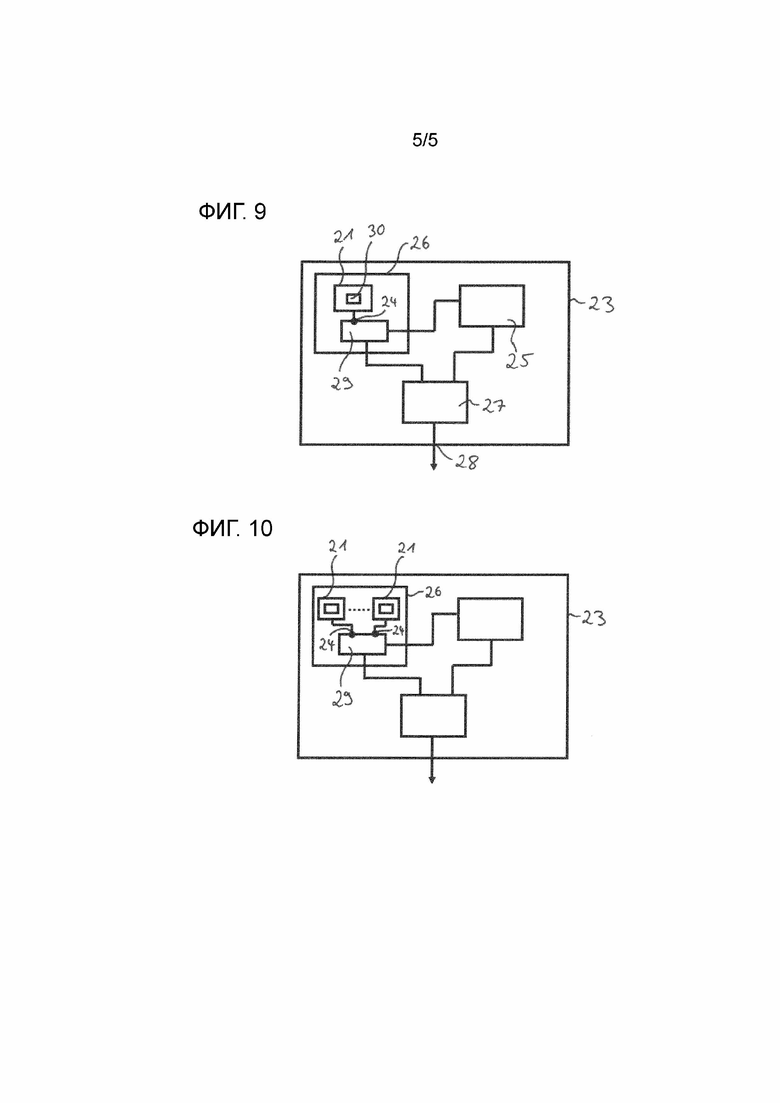
Фиг. 9 показывает дополнительный примерный вариант осуществления системы 23 оценки. В сравнении с вариантом осуществления, показанным на фиг. 7, блок 26 усреднения содержит колесный датчик 21 и блок 29 оценки. Колесный датчик 21 может быть размещен удаленным от других компонентов системы 23 оценки. Колесный датчик 21 размещается вблизи рельса 20. Колесный датчик 21 может быть установлен на рельс 20. Блок 29 оценки содержит вход 24 системы 23 оценки и соединяется с колесным датчиком 21 через вход 24. Блок 29 оценки дополнительно соединяется с блоком 25 памяти и с блоком 27 сравнения. Кроме того, система 23 оценки содержит выход 28 для предоставления выходного сигнала, если разностный сигнал DIF больше предварительно определенного порогового значения.
Колесный датчик 21 содержит дополнительный блок 30 усреднения, который конфигурируется, чтобы определять промежуточные вторые колесные сигналы IAV2 для поднаборов SUB второго набора колесных сигналов SW2. Промежуточные вторые усредненные колесные сигналы IAV2 предоставляются блоку 29 оценки. Блок 29 оценки сконфигурирован, чтобы определять второй усредненный колесный сигнал AV2 из промежуточных вторых усредненных колесных сигналов IAV2.
Фиг. 10 показывает дополнительный примерный вариант осуществления системы 23 оценки. В сравнении с вариантом осуществления, показанным на фиг. 9, блок 26 усреднения содержит множество колесных датчиков 21, которые указываются пунктирной линией между колесными датчиками 21. Каждый колесный датчик 21 соединяется с блоком 29 оценки через вход 24, соответственно. Альтернативно, что не показано, все колесные датчики 21 соединяются с блоком 29 оценки через один и тот же вход 24.
Ссылочные позиции
20: рельс
21: колесный датчик
22: колесо
23: система оценки
24: вход
25: блок памяти
26: блок усреднения
27: блок сравнения
28: выход
29: блок оценки
30: дополнительный блок усреднения
31: монтажная система
32: несущий элемент
33: зажим
34: нижняя сторона
35: кабель
36: верхняя поверхность
37: верхняя сторона
38: верхняя часть
AV1: первый усредненный колесный сигнал
AV2: второй усредненный колесный сигнал
DIF: разностный сигнал
d: расстояние
f: расстояние
IAV2: промежуточный второй усредненный колесный сигнал
m: максимальная амплитуда
S1-S5: этапы
SUB: поднабор
SW1: первый набор колесных сигналов
SW2: второй набор колесных сигналов
z: вертикальное направление
Изобретение относится к средствам измерения износа рельса. Способ включает регистрацию первого набора колесных сигналов (SW1) посредством колесного датчика (21), установленного на рельсе (20), определение первого усредненного колесного сигнала (AV1) для первого набора колесных сигналов (SW1), регистрацию по меньшей мере одного второго набора колесных сигналов (SW2) посредством колесного датчика (21), когда второй набор колесных сигналов (SW2) колес регистрируется после регистрации первого набора колесных сигналов (SW1) колес, определение второго усредненного колесного сигнала (AV2) для второго набора колесных сигналов (SW2) и определение разностного сигнала (DIF), предоставленного посредством разности между вторым усредненным колесным сигналом (AV2) и первым усредненным колесным сигналом (AV1), при этом колесный сигнал регистрируется, когда колесо (22) рельсового транспортного средства проходит колесный датчик (21). Достигается повышение надежности измерений износа рельса на пути. 2 н. и 13 з.п. ф-лы, 10 ил. 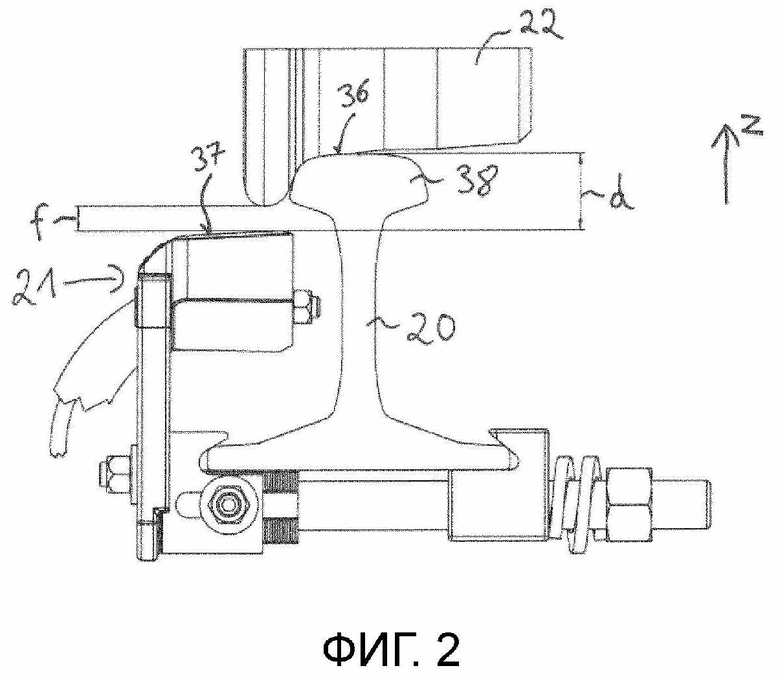
1. Способ измерения износа рельса (20), причем способ содержит:
- регистрацию первого набора колесных сигналов (SW1) посредством колесного датчика (21), установленного на рельсе (20),
- определение первого усредненного колесного сигнала (AV1) для первого набора колесных сигналов (SW1),
- регистрацию по меньшей мере одного второго набора колесных сигналов (SW2) посредством колесного датчика (21), причем второй набор колесных сигналов (SW2) колес регистрируют после регистрации первого набора колесных сигналов (SW1),
- определение второго усредненного колесного сигнала (AV2) для второго набора колесных сигналов (SW2), и
- определение разностного сигнала (DIF), представляемого посредством разности между вторым усредненным колесным сигналом (AV2) и первым усредненным колесным сигналом (AV1), при этом
- колесный сигнал регистрируют, когда колесо (22) рельсового транспортного средства проходит у колесного датчика (21).
2. Способ по п. 1, в котором первый набор колесных сигналов (SW1) и по меньшей мере один второй набор колесных сигналов (SW2) содержат одинаковое число колесных сигналов.
3. Способ по любому из предшествующих пунктов, в котором первый набор колесных сигналов (SW1) и по меньшей мере один второй набор колесных сигналов (SW2) содержат по меньшей мере десять колесных сигналов соответственно.
4. Способ по любому из предшествующих пунктов, в котором первый усредненный колесный сигнал (AV1) является опорным сигналом для состояния без или для известного износа рельса (20).
5. Способ по любому из предшествующих пунктов, в котором разностный сигнал (DIF) относится к состоянию износа рельса (20).
6. Способ по любому из предшествующих пунктов, в котором множество разностных сигналов (DIF) определяют для разниц между множеством вторых усредненных колесных сигналов (AV2) колес и первым усредненным колесным сигналом (AV1).
7. Способ по любому из предшествующих пунктов, в котором выходной сигнал предоставляется, если разностный сигнал (DIF) больше предварительно определенного порогового значения.
8. Способ по любому из предшествующих пунктов, в котором первый усредненный колесный сигнал (AV1) содержит усредненное значение максимальной амплитуды колесных сигналов для первого набора колесных сигналов (SW1).
9. Способ по любому из предшествующих пунктов, в котором второй усредненный колесный сигнал (AV2) содержит усредненное значение максимальной амплитуды колесных сигналов для второго набора колесных сигналов (SW2).
10. Способ по любому из предшествующих пунктов, в котором промежуточные вторые усредненные колесные сигналы (IAV2) для поднаборов (SUB) второго набора колесных сигналов (SW2) определяются посредством колесного датчика (21), и второй усредненный колесный сигнал (AV2) определяется из промежуточных вторых усредненных колесных сигналов (IAV2) посредством блока (29) оценки.
11. Способ по любому из пп. 1-9, в котором второй набор колесных сигналов (SW2) предоставляется блоку (29) оценки, в котором определяется второй усредненный колесный сигнал (AV2).
12. Система (23) оценки для измерения износа рельса (20), причем система (23) оценки содержит:
- вход (24) для приема сигналов от по меньшей мере одного колесного датчика (21), установленного на рельс (20),
- блок (25) памяти, в котором сохраняется первый усредненный колесный сигнал (AV1) для первого набора колесных сигналов (SW1),
- блок (26) усреднения, который сконфигурирован для определения второго усредненного колесного сигнала (AV2) для второго набора колесных сигналов (SW2), и
- блок (27) сравнения, который сконфигурирован для определения разностного сигнала (DIF), предоставленного посредством разности между вторым усредненным колесным сигналом (AV2) и первым усредненным колесным сигналом (AV1), при этом
- каждый колесный сигнал относится к колесу (22) рельсового транспортного средства, проходящего колесный датчик (21),
- блок (26) усреднения соединен с входом (24), и
- блок (27) сравнения соединен с блоком (25) памяти и блоком (26) усреднения.
13. Система (23) оценки по п. 12, при этом система (23) оценки дополнительно содержит выход (28) для предоставления выходного сигнала, если разностный сигнал (DIF) больше предварительно определенного порогового значения.
14. Система (23) оценки по любому из пп. 12 или 13, в которой блок (26) усреднения содержит блок (29) оценки, который сконфигурирован для определения второго усредненного колесного сигнала (AV2).
15. Система (23) оценки по любому из пп. 12-14, в которой блок (26) усреднения содержит колесный датчик (21) и блок (29) оценки, при этом колесный датчик (21) содержит дополнительный блок (30) усреднения, который сконфигурирован для определения промежуточных вторых усредненных колесных сигналов (IAV2) для поднаборов (SUB) второго набора колесных сигналов (SW2), и при этом колесный датчик (21) соединен с блоком (29) оценки.
| US 5508698 A, 16.04.1996 | |||
| US 5381700 A, 17.01.1995 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |

