Изобретение относится к области авиации, в частности, к системам дозаправки летательных аппаратов топливом в полете по типу «шланг-конус» с управляемыми механизмами в составе заправочных устройств, которые применяются для стабилизации системы заправочного конуса-датчика и шланга, движение которых происходит в поле действия аэродинамических сил и сил тяготения.
Изобретение относится к дозаправке в воздухе, которая осуществляется путем перекачки топлива от самолета-заправщика к самолету-приемнику. В частности, изобретение относится к конструкции механизма стабилизации заправочного устройства (ЗУ), через который происходит управление положением ЗУ в возмущенном воздушном потоке, в том числе, при полной автоматизации всех этапов дозаправки и взаимодействия самолета-приемника с заправочным устройством, которое, в свою очередь, является составной частью единой системы автоматического управления (САУ) дозаправкой с замкнутыми контурами, включающими самолет-приемник, заправочное устройство и самолет-заправщик.
С помощью использования автостабилизируемого заправочного устройства в системе (шланг + ЗУ) при дозаправке самолет-приемник может точно выполнять все ее этапы: поиск ЗУ самолетом-приемником, его вывод в точку стыковки с ним, стыковку, стабилизацию своего положения относительно самолета-заправщика и безопасный увод самолета из области дозаправки после ее завершения.
Уровень техники
Дозаправка в воздухе – это совокупность мер по организации передачи топлива одним летательным аппаратом другому, сопровождаемая маневрированием самолета-приемника при взаимодействии его с заправочной системой, содержащей самолет-заправщик и заправочные технические узлы, и которая выполняется в настоящий момент несколькими способами:
- шланг-конус;
- использование заправочной штанги-стрелы на самолете-заправщике;
- крыло-крыло.
Дозаправка в воздухе считается одним из самых сложных этапов полета и увеличивает психофизическую нагрузку на пилота, поэтому все эти виды дозаправок очень трудоёмки и энергозатратны. Вследствие этого применение различных технических нововведений в методах проведения дозаправки и в конструкции ЗУ направлено на облегчение задачи управления самолетом-приёмником.
Далее приведен ряд технических предложений по конструкции ЗУ, опубликованных ранее и также предназначенных для решения этой задачи. Предполагается, что их реализация существенно позволяет сократить время стыковки с заправочным конусом, повысить эффективность, улучшить управляемость и стабилизацию ЗУ в возмущенном воздушном потоке, а также облегчить взаимодействие с ним самолета-приемника.
Известен патент Великобритании № 2593695 «Air-to-air refueling drogue assembly» («Конусное устройство для заправки в воздухе»), в котором предлагается система дозаправки в воздухе путем перекачки топлива с самолета-заправщика на самолет-приемник типа (шланг + ЗУ), где ЗУ может управляться по радиокомандам с самолета-приёмника. Изобретение представляет собой управляемый ЗУ, технический механизм для буксировки за самолетом, который содержит муфту для приема зонда самолета-приемника, одного или нескольких аэродинамических рулей или один или несколько исполнительных механизмов, предусмотренных в ЗУ и адаптированных выборочно активировать одну или несколько функций аэродинамического управления. Механизм активной стабилизации взаимодействует с воздушным потоком, проходящим через тормозной диск ЗУ так, чтобы создавать управляющие воздействия на ЗУ. Это устройство может быть управляемо дистанционно вручную или автоматически.
В описании данного патента приведены несколько способов применения заправочного устройства. Путем вращения вентилятора лопаток турбины потоком воздуха в канале приводится во вращение внутренний ротор. Бобышка приводит в действие электрический генератор по соответствующему сигналу. Исполнительные механизмы и связанные с ними схемы управления питаются от системы силового электропитания. Представленная конструкция ЗУ включает в себя четыре управляющих щитка. В этом варианте изделие имеет собранную (свернутую) конфигурацию, аэродинамические профили которого имеют возможность менять свое положение. Изделие также имеет собранную (свернутую) конфигурацию, но при убранных аэродинамических рулях. Если изделие находится в сложенном виде, то управление им производится опорными рычагами, между которыми расположено несколько крыльев.
Недостатком этой системы является сложная реализуемость данного изобретения, большой вес и сложность конструкции.
Также известна заявка на изобретение США №2017190440 «Actively Stabilized Drogue» («Заправочный конус с активной стабилизацией»), особенностью которого является активно стабилизированное ЗУ, включающее тормозной щит, тормозные протоки, отходящие от тормозного щита, прицепной корпус, прицепной кожух, систему килей и исполнительные механизмы. Корпус муфты предназначен для соединения через гибкий заправочный шланг с системой топливоподачи самолета-заправщика для осуществления перекачки топлива. На корпусе муфты заканчиваются тормозные стойки. Кожух муфты закрывает корпус муфты. Система дефлекторов-створок выпуска воздуха предназначена для стабилизации ЗУ и прикреплена к кожуху сцепки. Приводы предназначены для приведения в действие дефлекторов для достижения аэродинамической стабилизации. Приводы изготовлены из твердого сплава с памятью формы, так что ребра могут приводиться в действие путем подачи тепловой энергии на приводы. Однако данная система имеет существенный недостаток, который связан с риском усталости и разрушения сплава с памятью формы, так как данные виды сплавов могут восстанавливать форму и предсказуемо деформироваться только весьма ограниченное количество раз, после чего они не могут полностью принять исходную форму. Это делает систему менее долговечной и надежной.
Известен патент США № 8186623 «Controllable Drogue» («Управляемый заправочный конус»), в котором дозаправка в воздухе осуществляется с помощью ЗУ - конуса. Блок заправочного конуса содержит приемный блок заправочного устройства, блок управления, канал и соединитель заправочного шланга, предназначенный для жесткого подключения блока управления, который гибко соединен с заправочной горловиной. В некоторых вариантах реализации блок управления приспособлен для изменения ориентации по меньшей мере части воздуховода относительно продольной оси блока управления. Данное изделие может также использовать оптическую систему слежения за дозаправкой. Применение данной системы подразумевает под собой обращение к дополнительным патентам, которые описаны в работе, что заведомо удорожает применение оптической системы. К тому же использование оптической системы выдвигает большие требования к условиям приема и обработки полученной информации вследствие того, что возможность ее интерактивного использования при формировании управляющих сигналов САУ дозаправкой весьма ограничена при разных внешних условиях проведения дозаправки.
Также известны такие патенты Российской Федерации, как патенты на изобретения № 2762185 «Конус системы заправки топливом в полете», № 2746557 «Стабилизирующее устройство для системы заправки топливом в полете», № 2753777 «Юбка-парашют конуса-датчика подвесного агрегата заправки топливом в полете» патентообладателя АО "Научно-производственное предприятие "Звезда" имени академика Г.И. Северина", связанные со стабилизацией заправочного конуса. В данных патентах описан как стабилизирующий топливный конус, так и его модификации. Изобретение относится к заправке топливом летательных аппаратов в полете. Стабилизирующее устройство для системы заправки топливом в полете содержит множество несущих ребер-рычагов и тормозной тканевый парашют, размещенный на несущих рычагах и закрепленный на них двумя силовыми шнурами. Тормозной парашют выполнен из отдельных секторов в количестве, равном количеству несущих рычагов, закрепленных на силовых шнурах своими верхними и нижними краями. Секторы установлены с зазором по боковым сторонам, образуя против каждого рычага свободное пространство. Недостатком такой системы является недостаточная стабилизация вертикальных колебаний в условиях возмущенного воздушного потока, что не обеспечивает достаточную стабилизацию конуса, сложность управления конструкцией, которая в свою очередь не гарантирует необходимой точности наведения и стыковки самолета-приемника с ЗУ - конусом.
Наиболее близкими аналогами к предлагаемому изобретению являются устройства, конструкции которых описаны в патенте США № 7404530 «Control of a drogue body» («Управление корпусом заправочного конуса»), европейском патенте № 3842345 «Air to air active refuelling system and method for generating aerodynamic radial loads at a hose-end system» («Активная система дозаправки в воздухе и способ формирования аэродинамических радиальных нагрузок в системе наконечника шланга») и в диссертации «Active Control of Aerial Refueling Drogue» («Активное управление конусом для заправки в воздухе») (2014, Dissertations 256. Taeseung Kuk, Western Michigan University https://scholarworks.wmich.edu/dissertations/256).
Аналоги касаются конструкций ЗУ с активной стабилизацией и предполагается, что они будут иметь ряд преимуществ над широко используемыми парашютными конструкциями ЗУ без специальных средств стабилизации, поскольку способны изменять поле обтекания вокруг ЗУ необходимым образом, нейтрализуя действие возмущений на его движение.
В патенте США № 7404530 показан ряд вариантов исполнения конструкции ЗУ, использующих авторотационный механизм для стабилизации ЗУ в набегающем возмущенном потоке. В основном рассматривается конструкция с вращающимся лопастями и турбинным нагнетателем, который устраняет действие возмущений посредством выпрямления турбулентного потока в ламинарный с реактивным выпуском воздуха. Предполагается, что совместное действие гироскопического эффекта от вращения лопаток с турбонаддувом воздуха спрямляемого турбиной потока позволит устранить действие турбулентности. При этом воздух из набегающего потока подсасывается в турбину вращением лопастей. В конструкции лопасти могут поворачиваться вокруг своей оси. Гироскопические эффекты имеют важную, но неосновную роль при стабилизации положения ЗУ, главную же роль играет подсасывающий эффект турбины. Вращение лопастей, в основном, предназначено для регулирования подсасывающей силы.
К основным недостаткам этого аналога можно отнести то, что эффективность стабилизации положения ЗУ в данной реализации в возмущенном потоке имеет ограничения на величину аэродинамических возмущений и зависит от скоса потока воздуха внутри турбины. Набегающий возмущенный поток, который может менять свое направление и тем самым изменять интенсивность нагнетания воздуха внутри турбины, может вызвать сильное волновое сопротивление входящего воздуха с автоколебаниями внутри нее. При этом возможны эффекты при нестационарном обтекании, когда входящий в турбину воздух будет значительной своей частью отражаться наружу (эффект «запирания»). В этом случае эффективность стабилизации сильно упадет, и будет необходимо задействовать автоматический механизм постоянного контроля и управления разницей давления воздуха внутри и снаружи посредством его перепускания с целью «перезапуска» турбины. Все это делает конструкцию весьма сложной в управлении и в практической реализации.
В патенте № 3842345 используется также авторотационный стабилизатор с поворотными лопатками решетчатого типа. Гироскопический эффект может давать в этой конструкции значительное улучшение по стабилизации. Тем более, что решетчатые стабилизаторы имеют малые размеры и шарнирный момент по сравнению со сплошными.
К недостаткам данного аналога можно отнести то, что при сильных возмущениях набегающего потока диапазон изменения угловой скорости вращения решетчатых стабилизаторов может оказаться намного меньше, чем у сплошных стабилизаторов, и вследствие этого гироскопический эффект от их вращения может быть слабее. Нестационарное обтекание решеток может проявлять себя в виде неравномерного прохождения их воздухом, что негативно повлияет на эффективность лопастей-рулей и на создание необходимой величины аэродинамической силы, вызывающей вращение ротора ЗУ.
В диссертации «Active Control of Aerial Refueling Drogue» используется стабилизатор с поворотными лопатками в виде крыльев, имеющими поворотные рулевые поверхности. Рулевые плоскости позволяют осуществлять управление 3 способами, а именно:
1) выполнять стабилизацию за счет торможения на основе резкого увеличения лобового сопротивления ЗУ при симметричном расположении рулей относительно друг друга;
2) выполнять стабилизацию на основе гироскопического эффекта вращения лопастей ЗУ при асимметричном расположении рулей относительно друг друга;
3) выполнять регулирование положения ЗУ в продольной и боковой плоскостях при соответствующем отклонении рулевых поверхностей.
К недостаткам данного аналога можно отнести то, что диапазон изменения угловой скорости вращения роторного стабилизатора на основе крыльев с отклоняемыми рулевыми поверхностями будет меньше, чем с полностью поворотной лопастью аналогичных размеров, что серьезно ограничит использование гироскопического эффекта для стабилизации ЗУ.
Задачей предлагаемого изобретения является существенное повышение стабилизации системы (шланг + заправочное устройство) до достаточного уровня с целью обеспечения гарантированной стыковки в автоматическом режиме штанги самолета-приемника с ЗУ в потоке, возмущенном всеми известными видами воздействий (нестационарное обтекание, ветер, спутный/вихревой след от самолета-заправщика, приливная волна от самолета-приемника и т.д.), упрощение процесса управления при стыковке самолета-приемника к ЗУ и управления стабилизацией в движении относительно друг друга за счет стабилизации положения ЗУ, при этом необходимый уровень стабилизации должен обеспечивать все условия проведения процесса дозаправки в автоматическом режиме с возможностью его интенсификации, в том числе, и процесса дозаправки полетной группы летательных аппаратов (ЛА), в частности, дистанционно пилотируемых и автономных беспилотных летательных аппаратов (БЛА).
Принцип изобретения основан на использовании в ЗУ гироскопического эффекта для улучшения стабилизации и компенсации воздействия турбулентности возмущенного потока за счет самой авторотации.
Предлагаемое автостабилизируемое ЗУ, в отличие от прочих вариантов их конструкций и принципов действия, имеет значительные преимущества при его использовании. Например, парашютные конструкции ЗУ весьма чувствительны к действию таких возмущающих факторов, как боковой порывистый ветер и спутный след от двигателя и от фюзеляжа самолета-заправщика в набегающем потоке. Из-за негативного влияния вышеперечисленных возмущений на стабилизацию ЗУ с парашютной системой дозаправка самолета-приемника осуществляется только при выполнении определенных условий: положение ЗУ и самолета-приемника во время дозаправки по высоте должно быть ниже прохождения спутных следов от двигателя и фюзеляжа самолета-заправщика и при определенном диапазоне силы ветра. Однако в условиях нестационарного обтекания, ветровых возмущений и резких перепадов давления из-за восходящих потоков в полете самолета-заправщика и системы (шланг + ЗУ), возможны случаи, когда спутные следы могут оказаться в области дозаправки, что вызывает значительное ухудшение условий ее проведения.
Кроме парашютных систем используются конструкции ЗУ с системами активной стабилизации. В этих конструкциях используется система управления стабилизаторами ЗУ во время полета. Командные сигналы на отклонения рулевых поверхностей ЗУ принимаются по радиоканалу от самолета-приемника. Основная задача активной стабилизации ЗУ в такой конструкции - это частичная ламиниризация (упорядочивание) возмущенного вихревого потока для обеспечения стабилизации и, соответственно, отклонения положения ЗУ в необходимое для стабилизации положение в потоке поворотными рулями с возможностью подключения авторотационной стабилизации. Однако практика применения таких устройств показала, что улучшение стабилизации происходит в лучшем случае на 30%.
Поставленная задача в предлагаемом изобретении решается тем, что в системе дозаправки в воздухе с автоматическим управлением и автостабилизируемым заправочным устройством, содержащей заправочное устройство, шланг, контейнер для хранения, систему управления заправкой, заправочное устройство (ЗУ) выполнено автостабилизируемым и состоит из двух частей: первой части - неподвижного статора, образованного патрубком, на котором закреплен защитный экран, обеспечивающий защиту заправочного устройства от столкновения с фюзеляжем самолета-приемника и самолета-заправщика, и контактным конусом, расположенным на конце патрубка, обращенном к самолету-приемнику; и второй части – подвижного ротора, выполненного с возможностью вращения вокруг статора, в том числе, самовращения под действием набегающего потока воздуха, обеспечивая автостабилизацию ЗУ путем компенсации воздействия турбулентности возмущенного потока. Ротор образован тремя параллельными платформами, расположенными на общем валу, сформированном патрубком, вдоль оси статора.
На первой из платформ установлены лопасти, шарнирно закрепленные на этой платформе, с возможностью поворота вокруг собственной оси и относительно шарнира в продольной плоскости статора. На второй платформе установлены шарнирные и червячные механизмы, связанные с первой платформой и лопастями, обеспечивающие поворот лопастей вокруг собственной оси; при этом механизм вращения лопастей вокруг собственной оси выполнен в виде модуля передачи вращающего момента с третьей платформы на вторую, рычажного механизма, установленного на второй платформе и соединенного с осью лопасти с возможностью ее поворота, червячного механизма, проходящего через все платформы, осуществляющего совместное перемещение второй и третьей платформы при повороте лопастей и перемещение только третьей при их складывании/раскладывании. На третьей платформе установлены токосъемники, являющиеся частью генератора переменного тока, электродвигатель, обеспечивающий вращение валов червячных механизмов, проходящих через все три платформы, и поворот лопастей как вокруг собственной оси, так и вокруг шарнира. Также на третьей платформе установлено электрооборудование для преобразования, сохранения и передачи электроэнергии на электродвигатель и на систему управления поворотом лопастей, при этом блоки поворота вокруг шарнира при складывании/раскладывании выполнены в виде многозвенного рычажного механизма, входное звено которого закреплено на третьей платформе, а два выходных звена - соответственно на первой платформе и на оси лопасти. Кроме того, на валу между второй платформой и контактным конусом расположены постоянные магниты, которые совместно с токосъемниками, установленными на третьей платформе, образуют генератор переменного тока.
Система управления заправкой содержит контур автоматического регулирования движения ЗУ в потоке, обеспечивающий автостабилизацию ЗУ за счет того, что этот контур содержит датчики электромагнитного излучения, установленные на контактном конусе и обеспечивающие определение координат самолетом-приемником для управления им, радиомодуль, расположенный на третьей платформе ротора ЗУ, обеспечивающий передачу команд управления лопастями по радиоканалу самолета-приемника, блоки слежения - приемники электромагнитного диапазона за положением ЗУ на самолете-заправщике и самолете-приемнике, связанные с блоком слежения вычислители для определения координат ЗУ относительно самолетов и формирования управляющих сигналов, установленные как на самолете-приемнике для дистанционного управления заправочным устройством, так и на самолете-заправщике для обеспечения управления свертыванием/развертыванием системы заправки, интерфейсы для преобразования сигналов цифровой информации, поступающей в вычислители контура автоматического управления.
Принцип работы автостабилизируемого ЗУ заключается в следующем. Во время выпуска шланга с ЗУ в воздушный поток происходит раскрутка ротора заправочного устройства вокруг статора. Раскрутка происходит под действием набегающего потока, который взаимодействует с лопастями ротора, что приводит к вращению роторной системы. Это обеспечивает высокий уровень стабилизации ЗУ в возмущенном набегающем потоке.
Автостабилизируемое ЗУ может принимать два вида конфигураций:
1. Конфигурация хранения;
2. Рабочая конфигурация.
Конфигурация хранения представляет собой форму ЗУ, которую оно приобретает при размещении его вместе со шлангом топливной системы внутри контейнера самолета-заправщика и которая представляет собой форму со сложенными компактным образом лопастями ЗУ. В такой форме ЗУ самолет-заправщик осуществляет его перевозку внутри контейнера, и такую конфигурацию оно имеет на начальном этапе выпуска его в воздушный поток при подготовке к дозаправочному процессу и во время вытягивания вместе с шлангом из воздушного потока обратно в контейнер. В процессе выхода системы (шланг + ЗУ) происходит раскладывание лопастей в автоматическом режиме ЗУ до рабочей конфигурации. В рабочей же конфигурации ЗУ представляет собой объект с вращающимися в потоке лопастями.
Необходимо сказать, что автостабилизируемое ЗУ является объектом управления с замкнутым контуром, связывающим его как с самолетом-заправщиком, так и с самолетом-приемником. Развертывание ЗУ из конфигурации хранения в рабочую конфигурацию, а также уборка в обратной цепочке операций осуществляется по командам самолета-заправщика. Это позволяет во время выпуска и втягивания шланга с ЗУ соблюдать необходимую для безопасности дистанцию для конфигураций складывания/раскладывания. Поиск, обнаружение и постоянное наблюдение за ЗУ самолетом-приемником и самолетом-заправщиком при осуществлении дозаправки проводится с использованием либо системы технического зрения на основе оптико-электронных средств (ОЭС) слежения, либо на основе радиосредств и спутниковой навигационной системой. В зависимости от вида средств наблюдения, на ЗУ предусматривается устанавливать соответствующие им датчики-излучатели. При использовании ОЭС можно установить излучатели инфракрасного диапазона, при использовании же СНС - приемопередатчики диапазона работы GPS, ГЛОНАСС и пр., а при применении радиоканала антенны-излучатели заранее выбранного диапазона радиоволн. Связь с самолетом-приемником для управляющих воздействий необходима для того, чтобы обеспечить приемлемый уровень стабилизации ЗУ в возмущенном потоке относительно самолета-приемника. Это достигается тем, что с помощью команд управления с самолета-приемника регулируется поворот вокруг своих осей лопастей автостабилизируемого ЗУ. При этом можно интенсифицировать вращение ротора в потоке или наоборот, уменьшить его. Регулирование скорости вращения ротора необходимо для того, чтобы соблюдать необходимый баланс между улучшением стабилизации ЗУ в потоке и ростом его лобового сопротивления. Кроме того, при сближении ЗУ со штангой самолета-приемника непосредственно до их сцепки необходимо для безопасности стыковки снижать угловую скорость вращения автостабилизируемого ЗУ до приемлемого уровня.
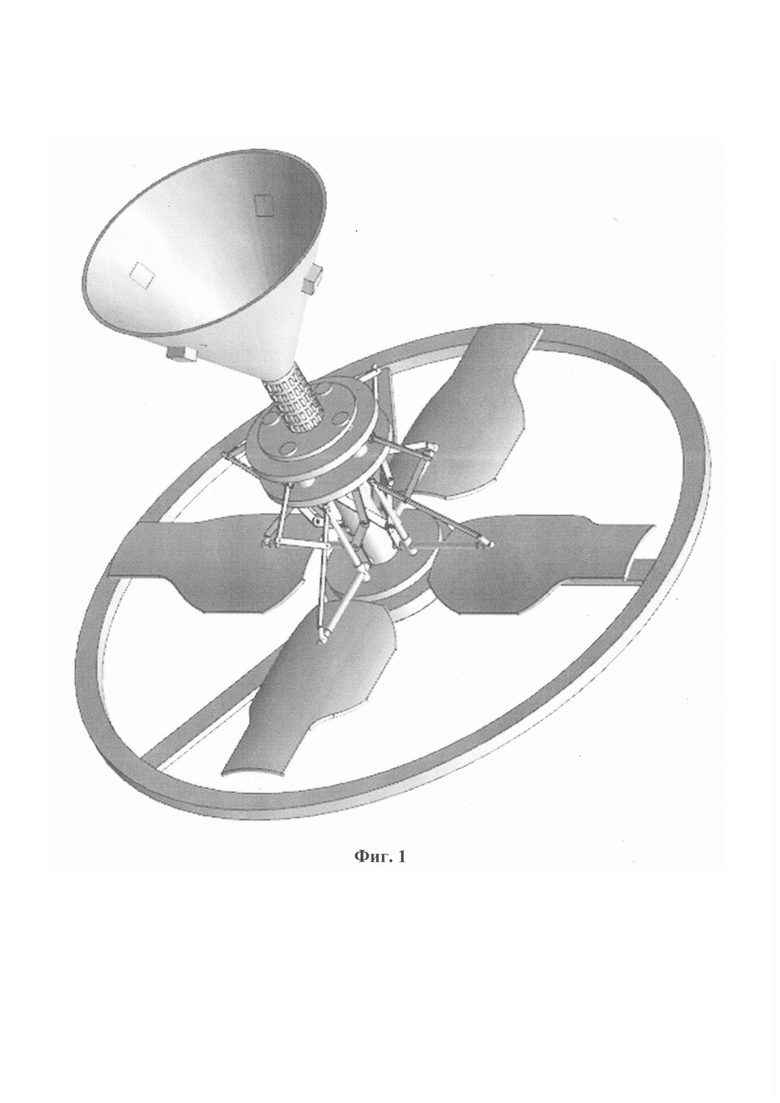
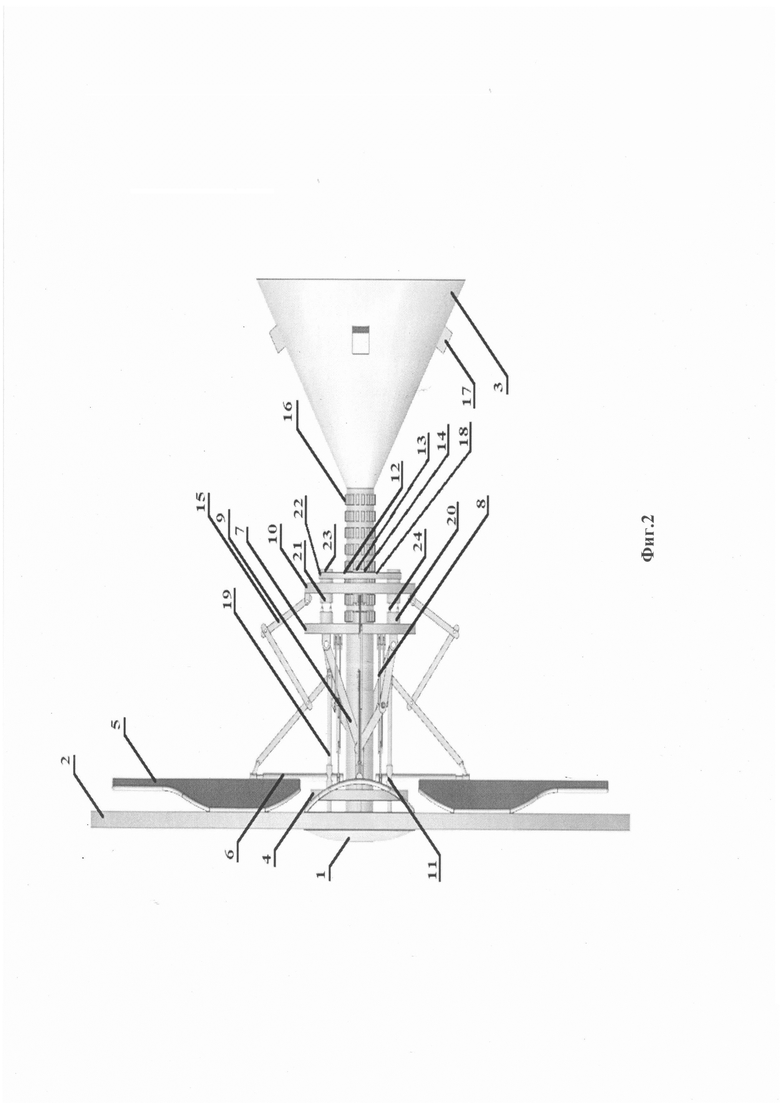
На фигуре 1 представлена конструкция заправочного устройства в рабочей конфигурации. На фигуре 2 изображена рабочая конфигурация заправочного устройства в разрезе, вид сбоку.
Здесь:
1 - патрубок;
2 - защитный экран;
3 - контактный конус;
4 - платформа с шарнирно закрепленными лопастями;
5 - лопасти;
6 - шарнирные элементы вращения лопасти;
7 - платформа, обеспечивающая поворот лопастей вокруг собственной оси;
8 - червячный механизм для поворота лопастей вокруг собственной оси;
9 - рычажный механизм, установленный на платформе 7 и соединенный с осью лопасти с целью ее поворота, механизма, проходящего через все платформы;
10 - платформа выработки и раздачи крутящего момента для червячных передач;
11 - шарнирный механизм на оси лопасти складывания/раскладывания лопастей;
12 - токосъемники, являющиеся частью генератора переменного тока;
13 - электродвигатель, обеспечивающий вращение валов червячной передачи;
14 - электрооборудование для преобразования, сохранения и передачи электроэнергии на электродвигатель и в модуль системы управления заправкой на ЗУ;
15 - многозвенный рычажный механизм блока поворота вокруг шарнира для складывания/раскладывания;
16 - постоянные магниты, которые совместно с токосъемниками 12, которые образуют генератор переменного тока;
17 - датчики электромагнитного излучения, обеспечивающие определение самолетом-приемником координат ЗУ с целью управления им;
18 - радиомодуль, обеспечивающий передачу команд управления лопастями по радиоканалу от самолета-приемника и самолета-заправщика;
19 - подшипниковый модуль для фиксации и поворота ротора вокруг статора;
20 - контактный маховик платформы 7;
21 - контактный маховик платформы 10;
22 - приводная цепь;
23 - шкив на платформе 10;
24 - отводной упор маховика 20.
Перекачка топлива из шланга на штангу топливной системы самолета-приемника осуществляется через канал, располагающийся внутри патрубка 1 (фиг. 1-2), который также является втулкой (осевой частью статора) для поворотной части автостабилизируемого ЗУ. Патрубок 1 соединен с защитным экраном 2. Также на патрубке 1 расположена группа постоянных магнитов 16, которые являются составной частью электрогенератора переменного тока, а тот, в свою очередь, кроме них включает токосъемники 12 на платформе 10. Электроток после преобразования из переменного в постоянный используется для питания электрооборудования, расположенного на платформе 4 ротора. Патрубок 1 скреплен с контактным конусом 3, который служит для сцепки ЗУ со штангой самолета-приемника. На поверхности контактного конуса располагаются датчики-излучатели 17 для обнаружения ЗУ самолетом-заправщиком и самолетом-приемником. Таким образом, соединенные вместе патрубок 1, защитный кран 2, контактный конус 3, магнитные элементы 16, образует систему статора автостабилизируемого ЗУ.
Ротор автостабилизируемого ЗУ представляет собой систему трех платформ: 4, 7, 10, перемещение которых относительно друг друга, осуществляется посредством 2-х пар специальных валов-шпилек червячной передачи 8 с широкими плоскими законцовками со стороны платформы 4. Одна из этих пар служит для перемещения платформы 7, что позволяет поворачивать лопасти вокруг своих осей, а другая отвечает за перемещение платформы 10 при складывании/раскладывании лопастей 5 в рабочее положение. Оси - составные и могут складываться/раскладываться посредством шарнира 11. Поворот вокруг своих осей лопасти 5 осуществляют с помощью механизма 6. Фиксацию лопастей 5 в положение, когда оси перпендикулярны оси вращения ротора автостабилизируемого ЗУ, производится с помощью нескольких устройств, которые сведены в рычажный механизм 8. Другой рычажный механизм 15 также позволяет осуществлять уборку лопастей 5 в специальные пазы на платформе 4. Связь осей с рычажным механизмом 15 осуществляется посредством специального поворотного устройства, как показано на фиг. 1-2. Платформа 4 служит для крепления на ней лопастей 5 через оси. Внешний вид платформы 4 показан на фиг. 2. Крепление ротора к статору и свободу вращения осуществляет подшипниковый модуль 19, который позволяет всей конструкции ротора автостабилизируемого ЗУ вращаться вокруг патрубка 1.
Платформа 7 служит для поворота лопастей 5 вокруг своих осей, что осуществляется посредством передачи крутящего момента от электродвигателя 13 к валам-шпилькам 8 червячной передачи. Внешний вид платформы 7 показан на фиг. 1 и 2. Получение крутящего момента на платформе 4 происходит с помощью контактной системы с вращающимися маховиками, которые передают его на валы 8. Контактный маховик 20 имеет пару отводных упоров 24, через которые происходит прием крутящего момента от маховиков 21 платформы 10 с контактными уступами над их свободными поверхностями. При вращении уступы маховика 21 могут толкать контактные маховики 20 через их отводные упоры 24 с рычажными пружинными возвратными механизмами. Отводные упоры 24 могут отклоняться в одну сторону с возвратом в прежнее положение при обратном движении. Благодаря движению платформы 7 посредством червячной передачи с использованием валов 8 происходит одновременное перемещение этой платформы и рычажных механизмов 9, которые, в свою очередь, одновременно изменяют положение у всех лопастей 5 на один и тот же угол поворота. Валы 8 червячной передачи перемещаются через платформу 4 с использованием закрепленных на ней опорных резьбовых элементов.
Принцип взаимодействия платформ 7 и 10 следующий. Когда производится складывание/раскладывание автостабилизируемого ЗУ из одной конфигурации в другую, контактные маховики 20 и 21 расцеплены, и перемещение внутри конструкции осуществляет только платформа 10. Выставка автостабилизируемого ЗУ в рабочее положение, т.е. когда лопасти 5 выставлены для взаимодействия с набегающим потоком, возможна при сцепке маховиков 20 и 21 между собой. При этом платформы 3 и 4 начинают двигаться одновременно, что позволяет изменять угол поворота лопастей 5 вокруг своих осей. Когда достигается крайнее положение платформы 7 при выходе на максимальный угол поворота лопастей 5 (90 градусов от ориентации к плоскости платформы 4) одна пара валов 8 стопорится своей широкой плоской выступающей законцовкой, расположенной на платформе 4, так что они прекращают вращаться. Стопор валов, в свою очередь, останавливает вращение маховиков 20, что приводит к тому, что опоры на их поверхностях под действием усилия от уступов маховиков 21, которые при этом продолжают вращаться, прогибаются в сторону рычажных упоров, что и вызывает расцепку контактных маховиков 20 платформ 7 с маховиками-толкателями 21 платформы 10. После этого производится расхождение платформ 7 и 10 с тем результатом, что платформа 10 может двигаться дальше относительно платформы 4, тогда как платформа 7 остается в своем крайнем положении без движения относительно нее.
Третья основная функция платформы 10 – это ее задействование в качестве технического узла генератора для выработки электротока в цепи электропитания оборудования. Платформа 10 является частью ротора автостабилизируемого ЗУ, а также подвижной частью генератора переменного тока, вырабатываемого при вращении ротора вокруг патрубка 1, который, в свою очередь, является статором этого генератора. Как было сказано, на патрубке 1 расположены постоянные магниты 16, которые при взаимодействии токосъемниками 12 на платформе 10, вращающимися вместе с ней, вырабатывают переменный электрический ток. Переменный ток преобразуется в постоянный, электрическую энергию накапливают и передают в электроцепь двигателя 13 и радиомодуля управления двигателем 18. Электродвигатель преобразует электрическую энергию постоянного тока в механическую энергию вращения вала, который через редуктор электродвигателя передает ее валам червячной передачи 8 посредством вращения шкива 23. На платформе 4 присутствуют сразу четыре шкива 23, один из которых непосредственно принимает крутящий момент от электродвигателя, а другие принимают его через приводную цепь 22. При этом два шкива соединены с одой из пар валов 8, а другие два соединены с контактными маховиками-толкателями 21, которые, в свою очередь, передают крутящий момент от электродвигателя к контактным маховикам 21 платформы 7.
Работа системы дозаправки осуществляется следующим образом.
ЗУ выдвигается вместе со шлангом из контейнера самолета-заправщика и стыкуется с штангой топливной системы самолета-приемника. Топливо перекачивается через систему (шланг + ЗУ) в топливную систему самолета-приемника, после чего ЗУ отстыковывается. После выпуска в воздушный поток из контейнера самолета-заправщика системы (шланг + ЗУ) ЗУ в автоматическом режиме принимают рабочую конфигурацию (фиг. 1, 2) из конфигурации хранения с помощью выставки лопастей автостабилизируемого ЗУ в рабочее положение, обеспечивая при удалении его на безопасное расстояние от самолета-заправщика стабилизацию ЗУ относительно самолета-заправщика.
В своей рабочей конфигурации ЗУ допускает раскручивание автостабилизируемого ЗУ в набегающем воздушном потоке до диапазона угловых скоростей его вращения, обеспечивающего достаточный уровень стабилизации и относительно устойчивое положение ЗУ по отношению к положению самолета-заправщика в условиях внешних возмущений набегающего воздушного потока.
Самолет-приемник определяет местоположение ЗУ посредством расположенных на нем датчиков-излучателей оптического либо радиоволнового диапазона. При этом обеспечивается постоянная связь с самолетом-приемником и получение от него управляющих команд с целью улучшения стабилизации, и осуществляется доворот лопастей автостабилизируемого ЗУ к набегающему потоку, который обеспечивает авторотационное вращение для более точной стабилизации.
Управление стабилизацией положения ЗУ относительно самолета-приемника осуществляются на борту самолета-приемника на основе измерений и вычислений, проводимых там же, при этом измерения производятся с помощью радиосистем или с помощью системы технического зрения (компьютерного зрения). С использованием этих измерений вычислители выполняют обработку и вычисление координат положения ЗУ относительно самолета-приемника, после проведения всех измерений и вычислений система автоматического управления (САУ) дозаправкой в воздухе на борту самолета-приемника, соединенная с вычислителем, воспроизводит управляющие сигналы, которые передаются на ЗУ с помощью радиоканала связи и принимаются им через радиомодуль САУ, и на основе этого вырабатывается управляющий сигнал для поворота лопастей ЗУ, который исполняется системой управления электродвигателем и связанных с ним приводных механизмов ЗУ.
В рабочей конфигурации автостабилизируемое ЗУ может вырабатывать электроэнергию для автономного электропитания его системы управления, в том числе, электродвигательной установки.
По завершению дозаправочных операций и при уборке лебедкой на борту самолета-заправщика системы (шланг + ЗУ) из воздушного потока в контейнер самолета-заправщика производится автоматическое складывание ЗУ из рабочей конфигурации в конфигурацию хранения со сложенными лопастями для дальнейшей перевозки его вместе со шлангом внутри контейнера.
| название | год | авторы | номер документа |
|---|---|---|---|
| Наземный подвижный стенд и способ его применения для испытаний системы автоматического управления дозаправкой в воздухе | 2023 |
|
RU2819151C1 |
| САМОЛЕТ-ЗАПРАВЩИК | 1994 |
|
RU2100257C1 |
| САМОЛЕТ-ЗАПРАВЩИК | 1994 |
|
RU2142897C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ЗАПРАВКИ ТОПЛИВОМ В ПОЛЕТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2575301C1 |
| УСТРОЙСТВО ВИЗУАЛЬНОГО КОНТРОЛЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ И СКОРОСТИ ЗАПРАВЛЯЕМОГО САМОЛЕТА ПРИ ДОЗАПРАВКЕ ТОПЛИВОМ В ПОЛЕТЕ | 1996 |
|
RU2099253C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ПОЛОЖЕНИЕМ И СКОРОСТЬЮ ЗАПРАВЛЯЕМОГО САМОЛЕТА ПРИ ДОЗАПРАВКЕ ТОПЛИВОМ В ПОЛЕТЕ | 1996 |
|
RU2090458C1 |
| Устройство стабилизации конуса агрегата заправки топливом в полете | 2022 |
|
RU2797452C1 |
| СИСТЕМА ЗАПРАВКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ТОПЛИВОМ В ПОЛЕТЕ | 2021 |
|
RU2777576C1 |
| СПОСОБ ИНДИКАЦИИ ТЕКУЩЕЙ И ПРОГНОСТИЧЕСКОЙ ИНФОРМАЦИИ В ПРОЦЕССЕ ВОЗДУШНОЙ ДОЗАПРАВКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2676594C2 |
| УСТРОЙСТВО КОНТРОЛЯ ЗАПРАВКИ САМОЛЕТА ТОПЛИВОМ В ПОЛЕТЕ | 1997 |
|
RU2111154C1 |
Изобретение относится к системам дозаправки летательных аппаратов топливом в полете. Система дозаправки в воздухе содержит систему управления заправкой и автостабилизируемое заправочное устройство, которое состоит из двух частей. Первая часть представляет собой неподвижный статор, образованный патрубком (1), на котором закреплен защитный экран (2), и контактным конусом (3), расположенным на конце патрубка и обращенным к самолету-приемнику. Вторая часть представляет собой подвижный ротор, выполненный с возможностью вращения вокруг статора, в том числе самовращения под действием набегающего потока воздуха. Ротор образован тремя параллельными платформами (4, 7, 10), расположенными на общем валу, сформированном патрубком, вдоль оси статора. Достигается повышение стабилизации системы и упрощение процесса управления при стыковке. 2 ил.
Система дозаправки в воздухе с автоматическим управлением и автостабилизируемым заправочным устройством, содержащая заправочное устройство, шланг, контейнер для хранения, систему управления заправкой, отличающаяся тем, что заправочное устройство (ЗУ) выполнено автостабилизируемым и состоит из двух частей: первой части - неподвижного статора, образованного патрубком, на котором закреплен защитный экран, обеспечивающий защиту заправочного устройства от столкновения с фюзеляжем самолета-приемника и самолета-заправщика, и контактным конусом, расположенным на конце патрубка, обращенном к самолету-приемнику; и второй части - подвижного ротора, выполненного с возможностью вращения вокруг статора, в том числе самовращения под действием набегающего потока воздуха, обеспечивая автостабилизацию ЗУ путем компенсации воздействия турбулентности возмущенного потока, при этом ротор образован тремя параллельными платформами, расположенными на общем валу, сформированном патрубком, вдоль оси статора; на первой из платформ установлены лопасти, шарнирно закрепленные на этой платформе, с возможностью поворота вокруг собственной оси и относительно шарнира в продольной плоскости статора; на второй платформе установлены шарнирные и червячные механизмы, связанные с первой платформой и лопастями, обеспечивающие поворот лопастей вокруг собственной оси; при этом механизм вращения лопастей вокруг собственной оси выполнен в виде модуля передачи вращающего момента с третьей платформы на вторую, рычажного механизма, установленного на второй платформе и соединенного с осью лопасти с возможностью ее поворота, и червячного механизма, проходящего через все платформы, осуществляющего совместное перемещение второй и третьей платформы при повороте лопастей и перемещение только третьей при их складывании/раскладывании; на третьей платформе установлены токосъемники, являющиеся частью генератора переменного тока, электродвигатель, обеспечивающий вращение валов червячных механизмов, проходящих через все три платформы, и поворот лопастей как вокруг собственной оси, так и вокруг шарнира, также на третьей платформе установлено электрооборудование для преобразования, сохранения и передачи электроэнергии на электродвигатель и на систему управления поворотом лопастей, при этом блоки поворота вокруг шарнира при складывании/раскладывании выполнены в виде многозвенного рычажного механизма, входное звено которого закреплено на третьей платформе, а два выходных звена - соответственно на первой платформе и на оси лопасти; кроме того, на валу между второй платформой и контактным конусом расположены постоянные магниты, которые совместно с токосъемниками, установленными на третьей платформе, образуют генератор переменного тока; при этом система управления заправкой содержит контур автоматического регулирования движения ЗУ в потоке, обеспечивающий автостабилизацию ЗУ за счет того, что этот контур содержит датчики электромагнитного излучения, установленные на контактном конусе и обеспечивающие определение координат самолетом-приемником для управления им, радиомодуль, расположенный на третьей платформе ротора ЗУ, обеспечивающий передачу команд управления лопастями по радиоканалу самолета-приемника, блоки слежения - приемники электромагнитного диапазона за положением ЗУ на самолете-заправщике и самолете-приемнике, связанные с блоком слежения вычислители для определения координат ЗУ относительно самолетов и формирования управляющих сигналов, установленные как на самолете-приемнике для дистанционного управления заправочным устройством, так и на самолете-заправщике для обеспечения управления свертыванием/развертыванием системы заправки, интерфейсы для преобразования сигналов цифровой информации, поступающей в вычислители контура автоматического управления.
| US 7404530 B2, 29.07.2008 | |||
| DE 102011102279 A1, 29.08.2013 | |||
| EP 3686109 B1, 30.12.2020 | |||
| КОМПОЗИЦИЯ АНТИПЕРСПИРАНТА/ДЕЗОДОРАНТА | 2013 |
|
RU2567054C2 |
| КОНУС-ДАТЧИК АГРЕГАТА ЗАПРАВКИ ТОПЛИВОМ В ПОЛЕТЕ | 2012 |
|
RU2490179C1 |
| RU 2055784 C1, 10.03.1996 | |||
| СПОСОБ СТЫКОВКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ, СТЫКОВОЧНАЯ СИСТЕМА И СЦЕПНОЕ УСТРОЙСТВО | 2022 |
|
RU2791625C1 |

