Изобретение относится к авиации, а более конкретно к оборудованию, обеспечивающему заправку топливом самолетов в полете, и может быть использовано в системе самолетов-танкеров и дозаправляемых самолетов с целью повышения эффективности их применения.
Известно устройство заправки в воздухе для летательных аппаратов фирмы Messerschmitt - Bolkow - BLOHM GMBH. (см. заявку Франции N 2569652, кл. B 64 D 39/00, 1986). Устройство содержит установленную на самолете-танкере заправочную штангу с оперением, выполненную в виде телескопических раздвигаемых труб, пульт управления заправочной штангой, систему датчиков и вычислительное устройство, определяющее оптимальные параметры и регулирующее положение штанги путем подачи команд исполнительным механизмам.
Кроме того, имеется телекамера, позволяющая наблюдать за процессом заправки. Оператор может управлять уборкой - выпуском штанги. Такое устройство, однако, не может обеспечить надежное соединение с приемной штангой заправляемого самолета и безопасность заправки, особенно при плохих погодных условиях.
Более того, отсутствуют устройства, которые могли бы обеспечить выход заправляемого самолета к месту встречи, сближение и его стыковку с самолетом-танкером.
Известно дальнейшее развитие системы заправки, выполненное упомянутой фирмой (см. заявку ФРГ N 3440812, кл. B 64 D 39/00, 1986). Устройство заправки дополнительно снабжается телевизионным приемником, на котором индицируется информация, выдаваемая радиолокатором, о разности скоростей и взаимном удалении обоих самолетов. Кроме того, имеются устройства для передачи беспроводной и оптической информации для пилота заправляемого самолета.
Тем не менее, такая система также не обеспечивает надежный стыковки заправляемого самолета. Кроме того, отсутствуют устройства, позволившие обеспечить надежный выход к месту заправки заправляемого самолета.
Известен патент США N 5131438, кл. B 64 D 39/00 "Способ и устройство для заправки в полете беспилотного самолета".
Устройство содержит на беспилотном самолете выдвижной заправочный шланг, снабженный заправочным конусом, устройство управления шлангом, управляемое из танкера, снабженного заправочной штангой. Кроме того, устройство снабжено передающим средством, установленным на танкере, и приемным средством, установленным на беспилотном самолете, принимающим сигналы от передающего средства и управляющим устройством управления шлангом. При этом приемное и передающее средства выполнены в виде индуктивных катушек самовозбуждения, установленных на конусе и заправочной штанге.
Такое устройство не решает задач выхода самолетов к точке встречи и их сближения. Кроме того, система создает большие психофизические нагрузки на пилота танкера, ввиду отсутствия у него точных координат о взаимном положении конуса и штанги, действует только при малом расстоянии между ними, что снижает надежность и безопасность заправки.
Известна "Микроволновая систем для встречи и заправки самолетов в воздухе" - патент США N 4763861, кл. B 64 D 39/00, 1987.
Система снабжена микроволновым передатчиком, установленным на самолете-танкере, который обеспечивает передачу сигналов в заднюю полусферу на расстояние до 20 миль.
Недостатками данной системы являются:
- система не обеспечивает встречу самолетов при их удалении друг от друга на расстояние более 20 миль и при полетах на встречных курсах;
- система не обеспечивает пилота дозаправляемого самолета информацией об относительной скорости сближения самолетов, что в сильной степени осложняет выполнение этапа стыковки.
Известны системы спутниковой навигации, позволяющие точное определение местонахождения самолетов, судов и других транспортных средств. Такие системы позволяют решать вопросы навигации транспортных средств, в том числе и в районах, не оборудованных наземными радиотехническими средствами навигации. (см. патенты: США N 5099245, кл. G 01 S 5/14, НКИ - 342/357, 1992; ФРГ N 4136136, кл. G 01 S 5/02, 1993.) Однако известные спутниковые системы не предназначены для решения задач заправки самолетов в воздухе.
Ближайшим аналогом изобретения является "Устройство заправки топливом в полете" (см. патент Великобритании N 223725, кл. B 64 D 39/00, 1991).
Устройство включает, установленные на самолете-танкере, заправочный шланг с конусом, устройство управления выпуском-уборкой заправочного шланга и заправочную штангу, установленную на заправляемом самолете. Кроме того, имеются датчик положения конуса и датчик положения заправочной штанги, выполненные в виде источников света, установленных соответственно на конусе и заправочной штанге, и взаимодействующие с приемной камерой, установленной на самолете-танкере. Приемная камера, подсоединена к вычислителю, определяющему параметры взаимного положения конуса и заправочной штанги и вырабатывающему сигнал оптимального положения конуса. Изменение положения конуса достигается как с помощью устройства управления выпуском-уборкой заправочного шланга, так и помощью аэродинамических поверхностей на конусе.
Недостатком приведенной выше системы заправки является то, что у пилота заправляемого самолета отсутствует точная информация о параметрах взаимного положения конуса и заправочной штанги, в частности об относительной скорости сближения, что очень важно при выполнении этапа стыковки. Пилоту в этом случае приходится управлять самолетом по визуальной информации. Кроме того, надежность работы системы снижается в неблагоприятных погодных условиях и в темное время суток.
Все это приводит к увеличению психофизической нагрузки на пилота, снижению вероятности и безопасности стыковки и всего процесса заправки. Более того, очевидно, что для решения вопросов выхода к месту встречи и встречи самолетов, пилотам самолета-танкера и заправляемого самолета остается надеяться на штатные радионавигационные средства, которые не обеспечивают получения надежной информации о взаимном положении самолетов, особенно на расстояниях свыше 300 км или на встречных курсах, не решают поставленную задачу в условиях отсутствия наземных радионавигационных средств (например, над океанами, обширными арктическими районами). Это приводит к увеличению времени поиска и сближения самолетов, перерасходу топлива, и, в конечном итоге, к снижению эффективности дозаправки в воздухе.
В основу данного изобретения положена задача создания автономной системы дозаправки самолетов топливом в полете, которая бы обеспечивала поиск и встречу самолетов на всех курсах и на расстоянии не менее 300 км, и кроме того обеспечивала бы эффективное выполнение этапа стыковки конуса самолета-танкера со штангой дозаправляемого самолета за счет измерения и выдачи пилоту дозаправляющего самолета информации об относительной скорости сближения и взаимном положении конуса относительно штанги.
Кроме того, система заправки должна быть достаточно простой в эксплуатации, иметь минимальную массу, обеспечивать безопасность процесса заправки при минимальной психофизической нагрузке на пилота.
Более того, система должна обеспечивать выполнение процесса дозаправки с минимальными временными затратами для экономии топлива и повышения эффективности заправки.
Согласно изобретению, поставленная задача достигается тем, что в систему заправки самолета топливом в полете, включающую заправочный шланг с конусом, установленный на самолете-танкере, устройство выпуска-уборки заправочного шланга, заправочную штангу, установленную на заправляемом самолете, датчики положения конуса и заправочной штанги, средства определения относительной скорости сближения и взаимного положения конуса и заправочной штанги, содержащие вычислитель, введены первый и второй приемники спутниковой навигационной системы (СНС) с антеннами СНС, первая и вторая радиостанции ультракоротковолнового диапазона (УКВ), установленные соответственно на самолете-танкере и заправляемом самолете. Кроме того, самолет-танкер снабжен дополнительной антенной СНС, установленной на конусе и переключателем. При этом первый приемник СНС связан своим выходом с выходом первой радиостанции УКВ, а входом - с выходом переключателя, первый и второй входы которого подсоединены к антенне первого приемника СНС и дополнительной антенне СНС, вычислитель связан первым и вторым входом второй радиостанции УКВ и выходом второго приемника СНС, а выходом вычислитель связан с индикатором, установленным в кабине заправляемого самолета.
Более того, целесообразно систему выполнять с соединением выхода первой радиостанции УКВ с управляющим входом переключателя и пультом управления устройства выпуска-уборки заправочного шланга.
Использование предлагаемой системы заправки топливом в полете позволяет:
- обеспечить высокую вероятность выхода самолета-танкера и заправляемого самолета к месту встречи в условиях отсутствия наземных средств навигации,
- обеспечить высокую вероятность и надежность стыковки самолетов,
- снизить психофизическую нагрузку на пилотов.
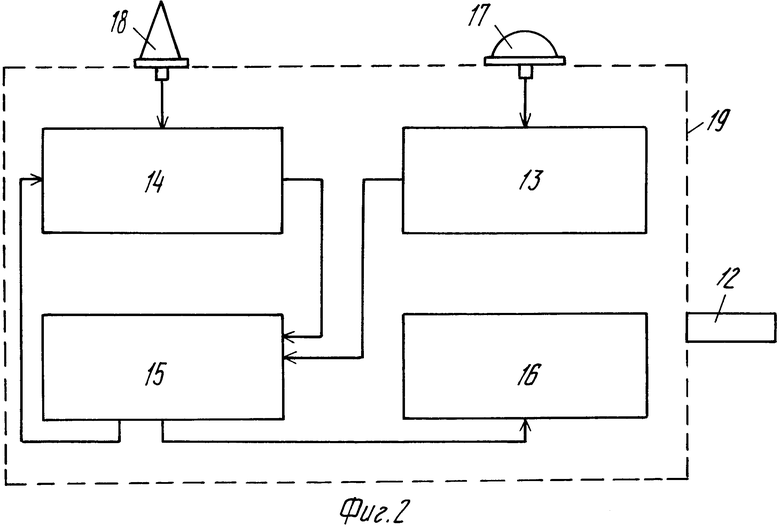
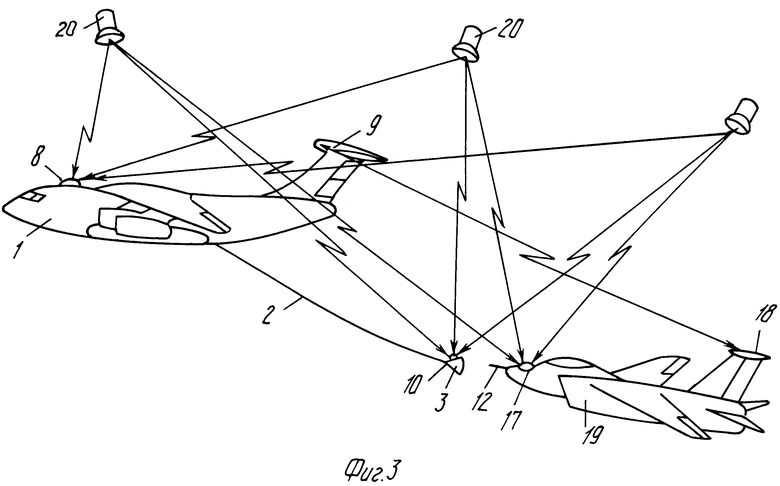
На фиг.1 изображена блок-схема оборудования самолета-танкера; на фиг.2 - блок-схема оборудования заправляемого самолета; на фиг.3 - взаимодействие самолета-танкера и заправляемого самолета в процессе выхода к месту встречи и сближения самолетов.
Система заправки самолета топливом в полете, выполненная в соответствии с изобретением, включает оборудование, установленное на самолете-танкере, и оборудование, установленное на дозаправляемом самолете.
Оборудование самолета-танкера 1 включает (см. фиг.1.):
заправочный шланг 2 с конусом 3, устройство выпуска-уборки заправочного шланга 4, первый приемник СНС (спутниковой навигационной системы) 5, первую радиостанцию УКВ (ультра-коротковолнового диапазона) 6, переключатель 7, антенну СНС 8, антенну УКВ-9 первой радиостанции УКВ-9, дополнительную антенну СНС-10.
Оборудование дозаправляемого самолета 19 включает (см. фиг.2, 3):
заправочную штангу 12, второй приемник СНС 13, вторую радиостанцию УКВ 14, вычислитель 15, индикатор 16, антенну СНС 17, антенну УКВ 18.
В системе используются известные приемники СНС, предназначенные для приема информации от спутников, обработки ее и определения координат и скоростей транспортного средства.
Радиостанции УКВ также известной конструкции, включающие приемник, передатчик и антенну УКВ, связанную с антенным входом антенным кабелем, и предназначены для приема и передачи цифровой и речевой информации.
Переключатель 7 представляет собой электромеханическое устройство на основе реле, управляющая обмотка которого связана с управляющим входом переключателя, а два рабочих контакта реле связаны соответственно с первым и вторым входом переключателя, а выходной контакт реле является выходом переключателя (не показано).
Устройство выпуска-уборки заправочного шланга включает:
пульт оператора, шланговую лебедку с барабаном, шлангоукладчиком, блоком приводов лебедки и устройством аварийного перерезания заправочного шланга, блок автоматического управления процессом выпуска-уборки и подачи топлива, гидравлическую, топливную системы, систему электрооборудования и сигнализации, систему подсветки конуса, заправочный шланг с конусом (не показано).
Конус состоит (не показано) из шарового наконечника, хвостовик которого закреплен на штанге, установленной на заправочном шланге, замков заправочной штанги с гидроцилиндрами управления, обеспечивающих надежность соединения заправочной штанги дозаправляемого самолета с конусом самолета-танкера при условии нахождения скорости сближения самолетов (относительной скорости) в строго заданном диапазоне (0,4 - 0,8 м/с). Выход из заданного диапазона может привести к выбросу топлива из самолета-танкера, т.е. к аварийной ситуации.
Первый приемник СНС 5 своим входом связан с выходом переключателя 7, а выходом - с входом первой радиостанции УКВ 6, связанной антенным выходом с антенной УКВ 9. Переключатель 7 своим первым входом связан с антенной 8 СНС первого приемника СНС, а вторым входом - с дополнительной антенной СНС 10, установленной на конусе 3. При этом антенный кабель 11 установлен (см.фиг. 1) на заправляемом шланге 2, подсоединен к пульту оператора устройства выпуска-уборки заправочного шланга 4, выход которого подсоединен к второму входу переключателя 7. Целесообразно командный выход первой радиостанции УКВ связать с управляющим входом переключателя и системой сигнализации пульта оператора.
На заправляемом самолете 19 выходы второй радиостанции УКВ 14 и второго приемника СНС 13 подсоединены к входам вычислителя 15, первый и второй выходы которого подсоединены к командному входу второй радиостанции УКВ 14 и индикатору 16 соответственно.
Антенный вход-выход второй радиостанции УКВ связан антенным кабелем с антенной УКВ 18, расположенной на внешней поверхности хвостового оперения. Второй приемник СНС 13 связан антенным кабелем с антенной СНС 17, которая расположена на внешней поверхности самолет вблизи заправочной штанги 12 и является по сути датчиком положения заправочной штанги 12 и заправляемого самолета.
Датчиком положения конуса 3 при измерении параметров взаимного положения конуса и заправочной штанги является дополнительная антенна СНС 10, установленная на конусе 3.
Система работает следующим образом. При удалении самолета-танкера 1 от заправляемого самолета 19 (см. фиг.3) на расстоянии более 3-х км конус 3 со шлагом 2 находится под фюзеляжем самолета-танкера и следовательно дополнительная антенна СНС 10 не принимает сигналы от спутников 20. В этом случае первый приемник СНС 5 соединен через переключатель 7 с антенной СНС 8, установленной на фюзеляже самолета.
Первый и второй приемники СНС через антенны 8 и 17 принимают от спутников 20 соответствующую информацию, на основании которой вычисляют псевдодальности и псевдоскорости для каждого из самолетов.
Параметры движения самолета-танкера 1 (псевдодальности и псевдоскорости) через радиоканал, включающий первую радиостанцию УКВ 6 с антенной 9 и вторую радиостанцию УКВ 14 с антенной 18, поступают на вход вычислителя 15 одновременно с аналогичными параметрами, вычисленными вторым приемником СНС 13, установленным на заправляемом самолете 19.
Вычислитель 15, обрабатывая информацию о псевдодальностях и псевдоскоростях самолетов, вычисляет их относительные координаты (относительное положение) и скорости (скорость сближения) и выдает на индикатор 16, установленный в кабине заправляемого самолета 19.
В процессе сближения самолетов в вычислителе 15 происходит непрерывное сравнение условий: ,
,
где Xотн., Zотн., Yотн. - расстояние между самолетами по горизонтали, боковой и вертикальной координатах в метрах соответственно.
При достижении этого условия (т.е. при сближении самолетов) вычислитель формирует сигнал на выпуск заправочного шланга с конусом. Этот сигнал второй радиостанции УКВ через антенну УКВ 18 передается на борт самолета-танкера 1, где принимается через антенну УКВ 9 первой радиостанцией УКВ 6. на выходе которой формируется управляющий сигнал для срабатывания переключателя 7 и срабатывания сигнализации на пульте оператора устройства выпуска-уборки заправочного шланга 4. По команде оператора происходит выпуск заправочного шланга с конусом.
После выпуска шланга с конусом первый приемник СНС 5 начинает работать с дополнительной антенной СНС 10, которая принимает сигналы от спутников 20.
В этом случае вычислитель 15 вычисляет взаимное положение (относительные координаты) и скорость сближения (относительную скорость) между конусом 3 и заправочной штангой 12 заправляемого самолета 19 и выдает информацию пилоту на индикатор 16.
Благодаря наличию на экране высокоточной информации о взаимном положении и скорости сближения конуса и штанги пилот заправляемого самолета производит управление самолетом до попадания заправочной штанги в конус и производства стыковки.
Измерение относительных координат и скоростей между дозаправляющимся самолетом и самолетом-танкером производится следующим образом.
Первый приемник СНС 5, установленный на самолете-танкере измеряет псевдодальности D
Кроме того, со спутников на приемник СНС поступает следующая информация об их параметрах:
Xj, Yj, Zj - координаты спутников в прямоугольной геоцентрической системе координат XYZ;
θм, θаз - углы места и азимута, определяемые в системе координат XYZ;
с/ш - соотношение сигнала к шуму;
ti - московское время;
j = 1 -12 - номера спутников.
Перечисленная выше информация с приемника СНС поступает на вход первой радиостанции УКВ, установленной на самолете-танкере и с помощью передатчика передается на борт дозаправляющего самолета. Данная информация принимается второй радиостанций УКВ, установленной на дозаправляющемся самолете и с выхода приемника поступает на вычислитель 15, который установлен на дозаправляющемся самолете.
Одновременно, т. е. в момент времени ti вторым приемником СНС, установленном на дозаправляющем самолете, измеряются псевдодальности D
Указанная информация с второго приемника СНС поступает также в вычислитель 15.
В вычислителе 15 в первую очередь производится селекция спутников, т.е. выбираются общие спутники с которыми одновременно функционируют оба приемника СНС.
После селекции спутников вычисляются координаты обоих самолетов в геоцентрической системе координат OXYZ.
Вычисление координат самолета-танкера Xт, Yт, Zт и дозаправляющегося самолета Xз, Yз, Zз осуществляется на основании выражений: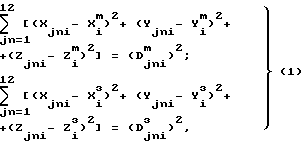 ,
,
где
Xjni, Yjni, Zjni -координаты спутников в геоцентрической системе координат, при этом индекс "jn" обозначает номера обоих спутников, а индекс "i" обозначает единое фиксированное время;
X
X
D
На основании выражений (1) определяются координаты самолета-танкера X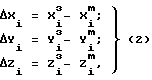 ,
,
где
ΔXi, ΔYi, ΔZi - разности геоцентрических координат.
С целью уменьшения методических ошибок вычисление относительных координат производится в ортодромической системе координат
X0Y0Z0, для чего используются следующие выражения:
(X
где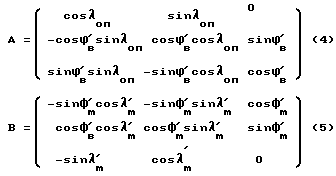 .
.
В выражениях (3) -(5) приняты следующие обозначения:
λоп - опорная долгота ортодромии; - геоцентрическая широта вертекса ортодромии;
- геоцентрическая широта вертекса ортодромии; - геоцентрическая ортодромическая широта и долгота самолета-танкера;
- геоцентрическая ортодромическая широта и долгота самолета-танкера;
X
Взаимное положение дозаправляющегося самолета относительно самолета-танкера определяется в системе координат, связанной с вектором путевой скорости танкера.
В этом случае система координат X
- ось OX
- ось OY
- ось OZ
Начало системы X
В этом случае относительные горизонтальные координаты будут определяться на основании следующих выражений; .
.
В выражениях (6)-(8) приняты следующие обозначения:
X
α
Алгоритмы вычисления относительных скоростей V
Таким образом, на основании измерений приемниками СНС псевдодальностей и псевдоскоростей в вычислителе 15, установленном на дозаправляющемся самолете вычисляются компоненты вектора состояния, определяющего относительное положение X
С целью определения точностных характеристик предлагаемой системы заправки топливом самолетов в полете были проведены мобильные испытания, которые показали ее высокие точностные характеристики. Так при удалении друг от друга движущихся на расстояние 50 м ошибки измерения предлагаемой системы составили:
- относительных координат - 0,5 м (2σ) ;
- относительных скоростей - 0,003 м/с (2σ) .
Таким образом, применение предлагаемой системы заправки топливом самолетов в полете позволит следующее:
- повысить безопасность контактирования на этапе стыковки;
- обеспечить поиск и встречу самолетов на всех курсах и расстоянии не менее 300 км;
- существенно снизить психофизические нагрузки летчиков;
- сократить время заправки и расход топлива.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ЗАПРАВКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ТОПЛИВОМ В ПОЛЕТЕ | 2021 |
|
RU2777576C1 |
| Наземный подвижный стенд и способ его применения для испытаний системы автоматического управления дозаправкой в воздухе | 2023 |
|
RU2819151C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПО ДАННЫМ ПРИЕМНИКОВ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2008 |
|
RU2388008C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 1996 |
|
RU2134911C1 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
| МОБИЛЬНАЯ БАЗОВАЯ КОНТРОЛЬНАЯ СТАНЦИЯ ДЛЯ ПОЛУЧЕНИЯ ПАРАМЕТРОВ ТРАЕКТОРНОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И ОЦЕНКИ РАБОТОСПОСОБНОСТИ СИСТЕМ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 2007 |
|
RU2330320C1 |
| СИСТЕМА ОЦЕНКИ ТОЧНОСТНЫХ ХАРАКТЕРИСТИК БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2006 |
|
RU2314553C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
| Система дозаправки в воздухе с автоматическим управлением и автостабилизируемым заправочным устройством | 2023 |
|
RU2809164C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗАПРАВКИ САМОЛЕТА ТОПЛИВОМ В ПОЛЕТЕ | 1997 |
|
RU2111154C1 |
Сущность изобретения: система включает заправочный шланг с конусом, установленный на самолете-танкере, устройство выпуска-уборки шланга, заправочную штангу, установленную на заправляемом самолете, датчики положения конуса и заправочной штанги, средства определения взаимного положения конуса и заправочной штанги, содержащее вычислитель. Согласно изобретению система снабжена первым и вторым приемниками спутниковой навигационной системы (СНС) с антеннами СНС, первой и второй радиостанциями ультракоротковолнового диапазона (УКВ), установленными соответственно на самолете-танкере и заправляемом самолете, дополнительной антенной СНС, установленной на конусе, и переключателем, при этом первый приемник СНС связан своим выходом с входом первой радиостанции УКВ, а входом - с выходом переключателя, первый и второй входы которого подсоединены к антенне СНС первого приемника СНС и к дополнительной антенне СНС, вычислитель связан первым и вторым входом с выходом второго приемника СНС и выходом второй радиостанции УКВ соответственно, а выходом - с индикатором, установленным в кабине заправляемого самолета. 1 з. п. ф-лы, 3 ил.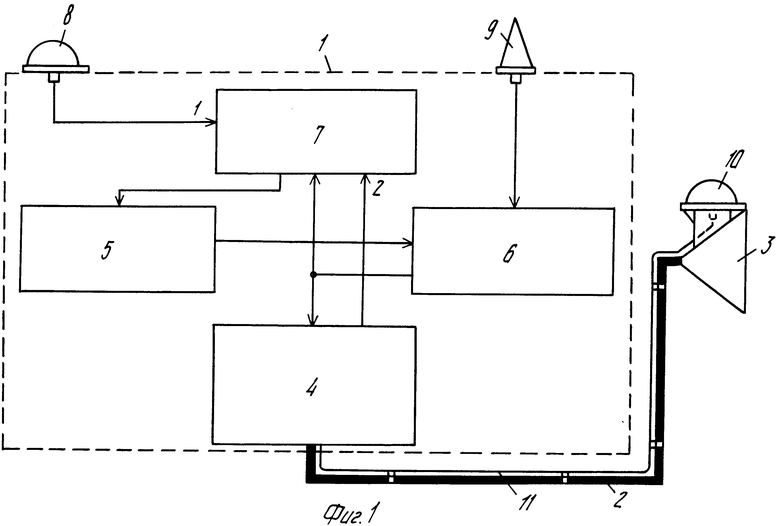
| GB, заявка, 2237251, кл | |||
| Нефтяной конвертер | 1922 |
|
SU64A1 |
