Изобретение относится к области радиолокации и может быть использовано в системах вторичной радиолокации при определении координат цели в системе «запрос-ответ».
Из уровня техники известны различные способы определения координат цели.
Один из способов описан изобретением (патент US №6933879, МПК: G01S 5/12, G01S 13/78, опубликован 23.08.2005), в соответствии с которым для определения координат цели используют следующие параметры: высоту цели, сообщаемую целью, высоту носителя, сообщаемую навигационной системой носителя, а также значение разницы между направлением на цель и направлением прицеливания антенны. В данном способе безошибочное определение координат цели возможно только тогда, когда направление оси Y нормальной системы координат (НСК) носителя совпадает с направлением оси Y локальной системы координат (ЛСК) антенны.
Наиболее близким к предлагаемому техническому решению является способ определения координат цели в системе «запрос-ответ» (патент RU №2666360, МПК: G01S 13/75, опубликован 07.09.2018), который выбран в качестве прототипа. Способ определения координат цели, описанный в прототипе, использует следующие параметры: расстояние от носителя до цели, высоту цели, высоту носителя, угловое положение носителя в пространстве (угловое смещение связанной системы координат (ССК) носителя относительно НСК носителя), угловое направление прицеливания антенны относительно носителя (угловое смещение ЛСК антенны относительно ССК носителя), получаемое от датчиков носителя, отклонение направления на цель относительно направления прицеливания антенны, определяемое системой определения координат цели.
Технической проблемой, возникающей при применении способа, описанного прототипом, является невозможность его использования при отсутствии на носителе информации об угловом смещении ЛСК антенны относительно ССК носителя, что существенно ограничивает область применения технического решения, описываемого прототипом.
Для решения указанной технической проблемы может использоваться, например, дополнение носителя датчиками углового смещения подвижной составной части носителя, на которой установлена антенна, и, соответственно, ЛСК антенны относительно ССК носителя. Такое решение порождает новые технические проблемы, связанные как с ухудшением надежности носителя за счет вновь вводимых механических составных частей, так и с необходимостью конструктивного размещения вновь вводимых датчиков на носителе, которое в ряде случаев является технически невыполнимым и/или экономически нецелесообразным.
Технический результат изобретения заключается в обеспечении возможности определения координат цели в системе «запрос-ответ», установленной на носителях, для которых получение требуемой данной системой информации об угловом смещении ЛСК антенны относительно ССК носителя невозможно.
Неожиданный технический результат изобретения заключается в возможности адаптации системы «запрос-ответ», использующей способ, к экземпляру носителя, на котором установлена система, за счет учета особенностей подвижной составной части, установленной на экземпляре носителя.
При анализе существующего уровня техники не выявлены аналоги заявляемого изобретения в виде способов определения координат цели в системе «запрос-ответ» с использованием антенны, имеющей заданное направление прицеливания, и объединяющих параметры, которые отражают положение цели, положение носителя антенны и направление прицеливания антенны, причем в качестве параметров используют расстояние от носителя до цели, высоту цели, высоту и угловое положение носителя в пространстве, и дополнительно в качестве параметра используют команды системе управления подвижной составной частью носителя, на которой установлена антенна.
Поиск технических решений в научно-технической литературе и смежных областях техники не выявил решения, имеющего признаки, совпадающие с отличительными признаками заявляемого изобретения.
Технический результат достигается тем, что способ определения координат цели в системе «запрос-ответ» с использованием антенны, имеющей заданное направление прицеливания, объединяет параметры, которые отражают положение цели, положение носителя антенны и направление прицеливания антенны, установленной на подвижной составной части носителя. Причем в качестве параметров используют расстояние от носителя до цели, высоту цели, высоту и угловое положение носителя в пространстве, угловое направление антенны на цель относительно носителя.
При этом способ включает следующие последовательно осуществляемые этапы:
- получают с помощью системы «запрос-ответ» ответные сигналы от цели и определяют азимутальное направление на цель в плоскости X0Z ЛСК антенны;
- по вычисленному азимутальному направлению на цель определяют плоскость азимутального пеленга на цель в ЛСК антенны, перпендикулярную плоскости X0Z ЛСК, путем задания в плоскости азимутального пеленга трех точек в границах основного лепестка ДН антенны или двух векторов границ основного лепестка ДН антенны;
- определяют угловое направление антенны на цель относительно носителя;
- определяют плоскость азимутального пеленга на цель в НСК носителя путем пересчета координат трех точек или двух векторов границ основного лепестка ДН антенны из ЛСК антенны в НСК носителя с использованием определенного на предыдущем этапе углового направления антенны относительно носителя;
- определяют плоскость высоты цели в НСК носителя, используя полученную от цели с помощью системы «запрос-ответ» информацию о высоте цели;
- определяют сферу равной дальности до цели, используя дальность до цели, получаемую преобразованием интервала времени от выдачи запроса до получения ответа от цели;
- вычисляют возможные положения цели в НСК носителя, как координаты точек пересечения плоскости азимутального пеленга, плоскости высоты цели и сферы равной дальности до цели;
- определяют углы между вектором целеуказания и каждым из направлений на возможные местоположения цели;
- производят отбор местоположения, для которого указанный угол имеет наименьшее значение;
- координаты отобранного местоположения используют в качестве координат цели.
Причем заявляемый способ отличается от прототипа тем, что дополнительно в качестве параметров используют текущие значения команд системе управления подвижной составной частью носителя, на которой установлена антенна. Угловое направление антенны на цель относительно носителя определяют как результат обработки в реальном времени текущих значений команд системе управления подвижной составной частью носителя, на которой установлена антенна. Причем команды системе управления обрабатываются по алгоритму, определенному математической моделью динамической механической системы «система управления подвижной составной частью носителя - подвижная составная часть носителя», а значения параметров математической модели формируются на этапе проектирования носителя и уточняются по результатам испытаний экземпляра носителя, на котором установлена система «запрос-ответ».
Сущность изобретения поясняется фиг. 1-10.
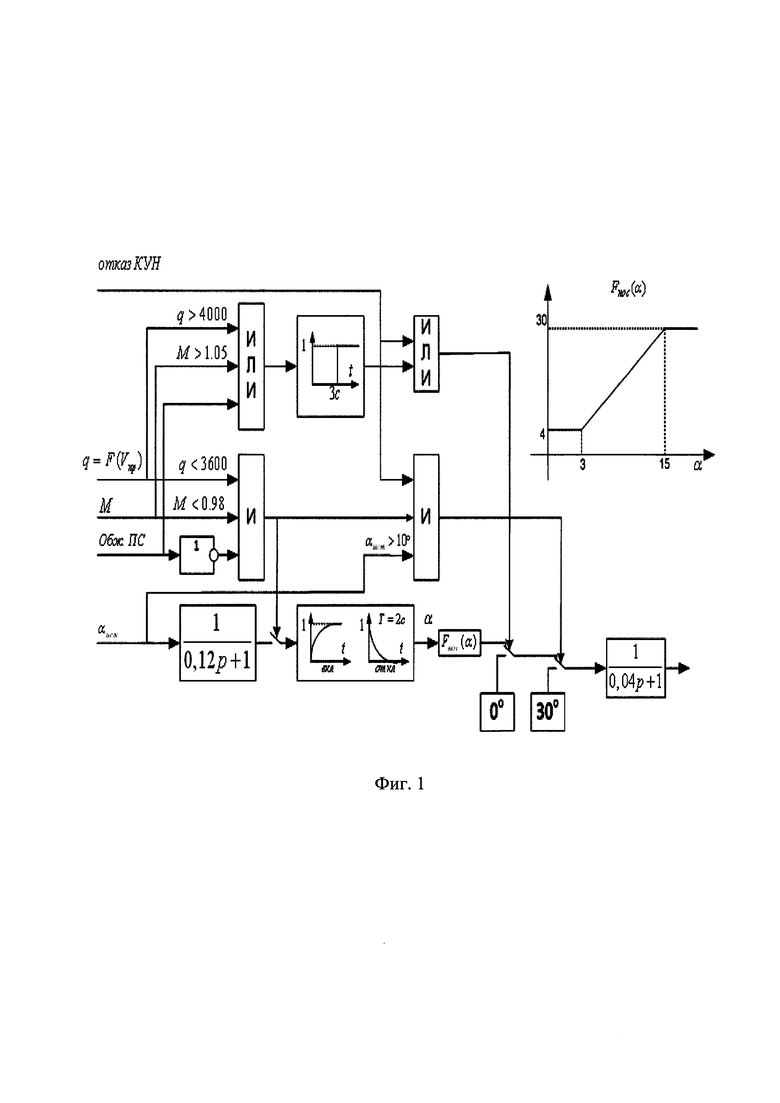
На фиг. 1 изображена схема динамической механической системы «система управления подвижной составной частью носителя - подвижная составная часть носителя». На схеме представлены информационные связи, входные команды управления для системы управления механической системы и функциональные блоки, обеспечивающие требуемые законы управления подвижной составной частью носителя, в том числе:
«отказ КУН (канал управления носками)» - дискретный сигнал отказа механики системы;
«q=F(Vпр)» - промежуточный параметр, значение которого зависит от текущей приборной скорости Vпр;
М - число Маха;
αаист - текущее значение угла атаки носителя;
α - промежуточный параметр, зависящий от αист, q, М и текущего времени;
Т - постоянная времени интегрирования;
0°, 30° - константы;
Обж.ПС - дискретный сигнал обжатия передней стойки шасси ЛА.
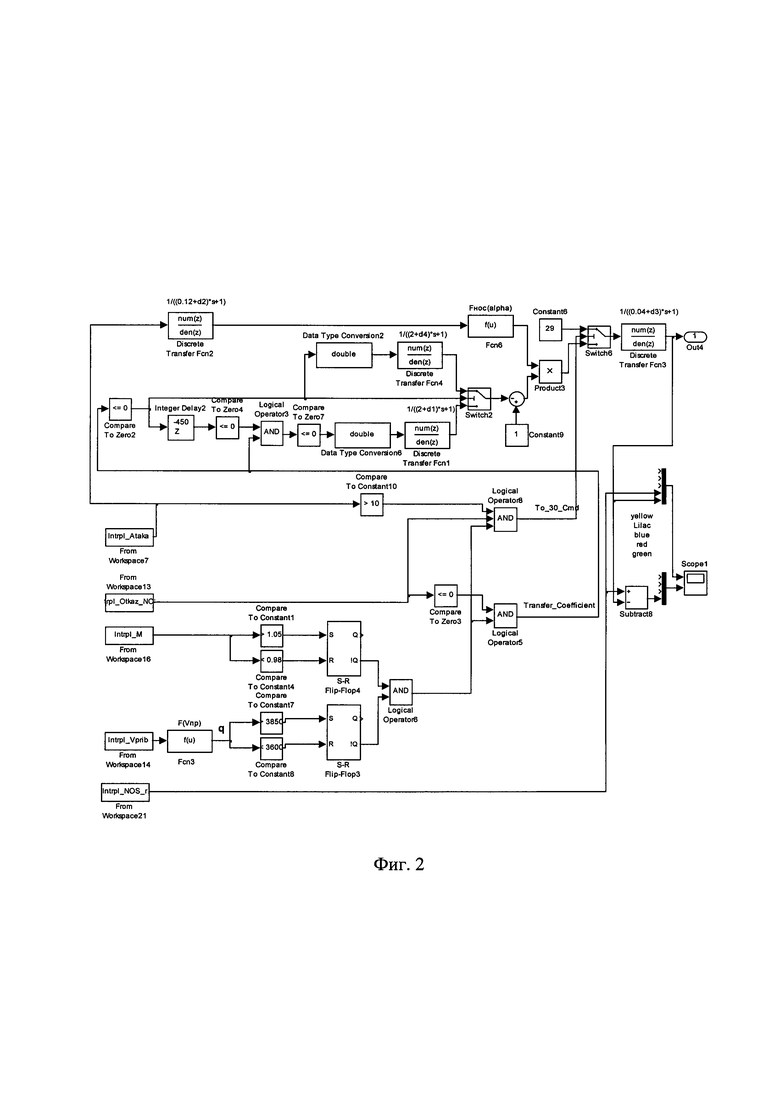
На фиг. 2 представлена математическая модель динамической механической системы в графическом виде пакета программ Matlab-Simulink, в том числе:
From Workspace7 - входной массив текущих значений угла атаки;
From Workspace13 - входной массив текущих значений команды «Отказ КУН»;
From Workspace16 - входной массив текущих значений числа Маха;
From Workspace14 - входной массив текущих значений приборной скорости Vпр;
From Workspace21 - входной массив измеренных угловых отклонений подвижной составной части носителя.
Discrete Transfer Fcn1, Discrete Transfer Fcn2, Discrete Transfer Fcn3, Discrete Transfer Fcn4 - функциональные блоки, моделирующие коэффициенты передачи параметров с учетом динамических свойств механической системы;
1/((2+d1)*s+1), 1/((0.12+d2)*s+1), 1/((0.04+d3)*s+1), 1/((2+d4)*s+1) - передаточные характеристики функциональных блоков, моделирующих коэффициенты передачи параметров с учетом динамических свойств механической системы, где
s - комплексная переменная преобразования Лапласа (Г. Корн, Т. Корн, Справочник по математике Для научных работников и инженеров, М., изд. Наука, 1973, стр. 228),
d1, d2, d3, d4 - добавки, уточняющие номинальные значения параметров по результатам испытаний экземпляра носителя, на котором установлена система «запрос-ответ»;
Fнос(alpha) - функциональный блок, моделирующий функцию Fнос(α) (эмпирическая функция, определяемая конструкцией ЛА);
F(Vпр) - функциональный блок, моделирующий промежуточный параметр q, значение которого зависит от текущей приборной скорости Vпр.
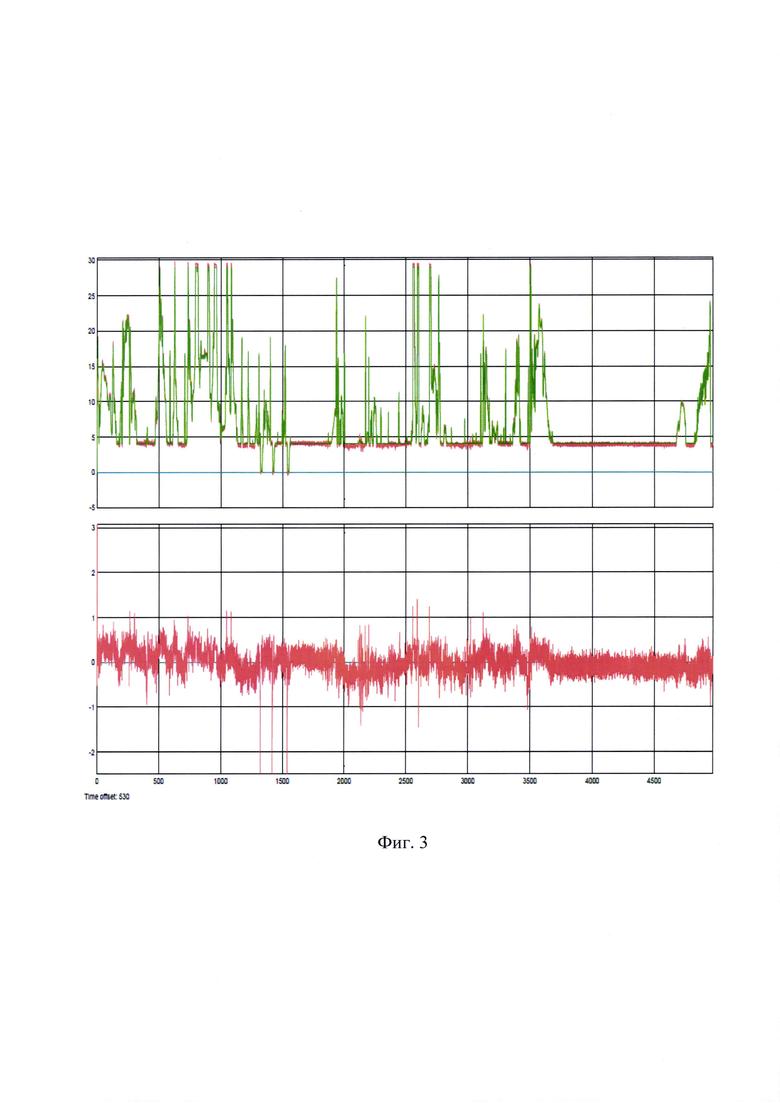
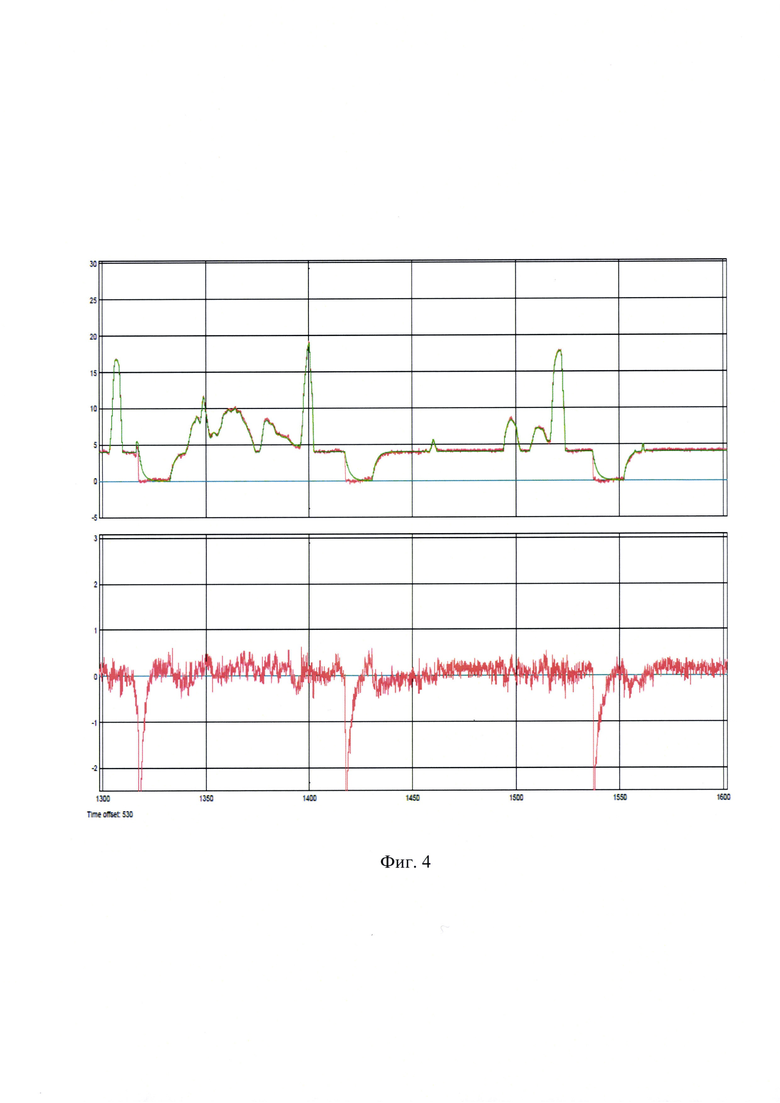
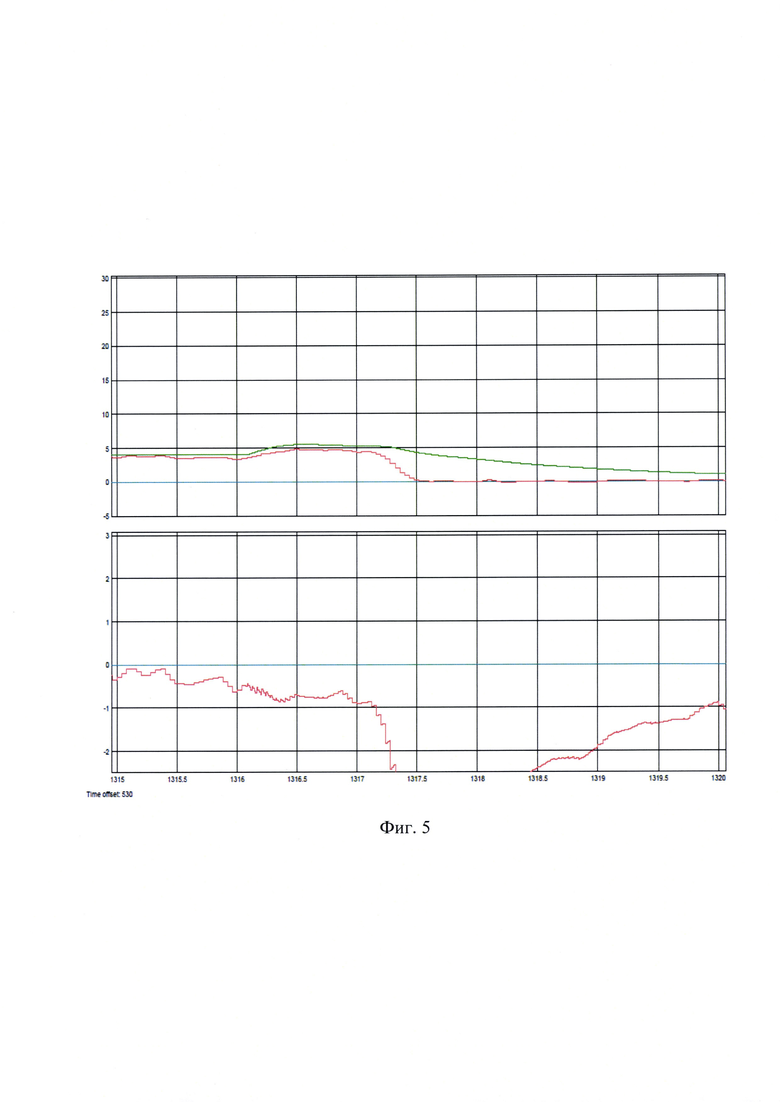
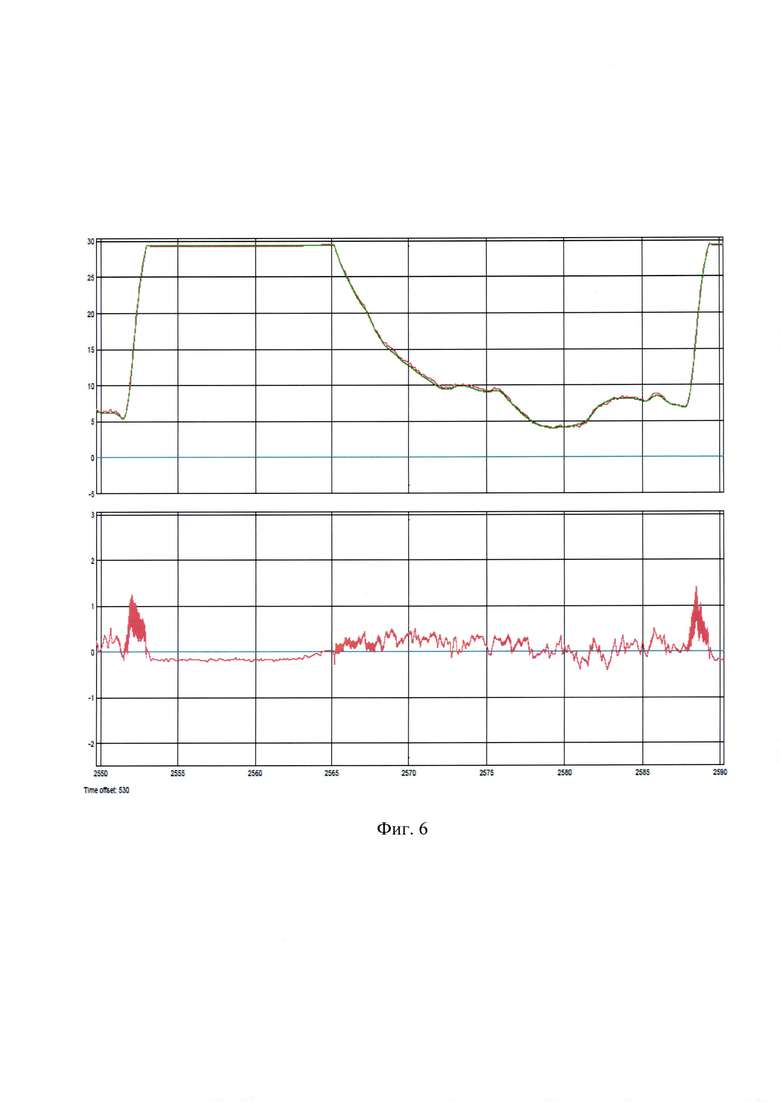
На фиг. 3 - фиг. 6 изображены результаты моделирования углового отклонения подвижной составной части носителя, на которой установлена антенна, на исходной математической модели в промежутках времени моделирования соответственно 0-4970 секунд (Фиг. 3), 1300-1600 секунд (Фиг. 4), 1315-1320 секунд (Фиг. 5) и 2550-2590 секунд (Фиг. 6). Представлены результаты моделирования поведения исходной математической модели при подаче на ее входы в реальном времени сигналов управления системой управления. Верхняя часть соответствующей фигуры представляет угловое положение подвижной составной части носителя, измеренное (красный цвет) при испытаниях экземпляра носителя, на котором установлена система «запрос-ответ», и угловое положение подвижной составной части носителя, рассчитанное (зеленый цвет) исходной математической моделью, нижняя часть соответствующей фигуры представляет расхождение между угловым положением, измеренным при испытаниях экземпляра носителя, и угловым положением, рассчитанным исходной математической моделью.
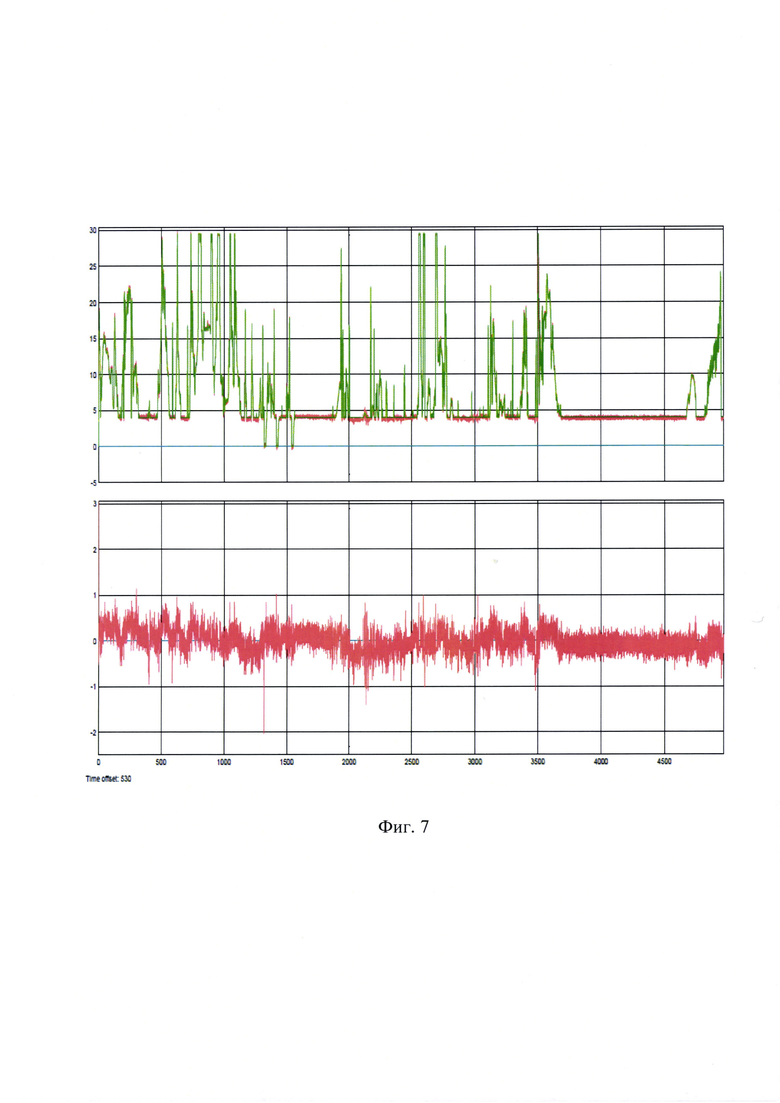
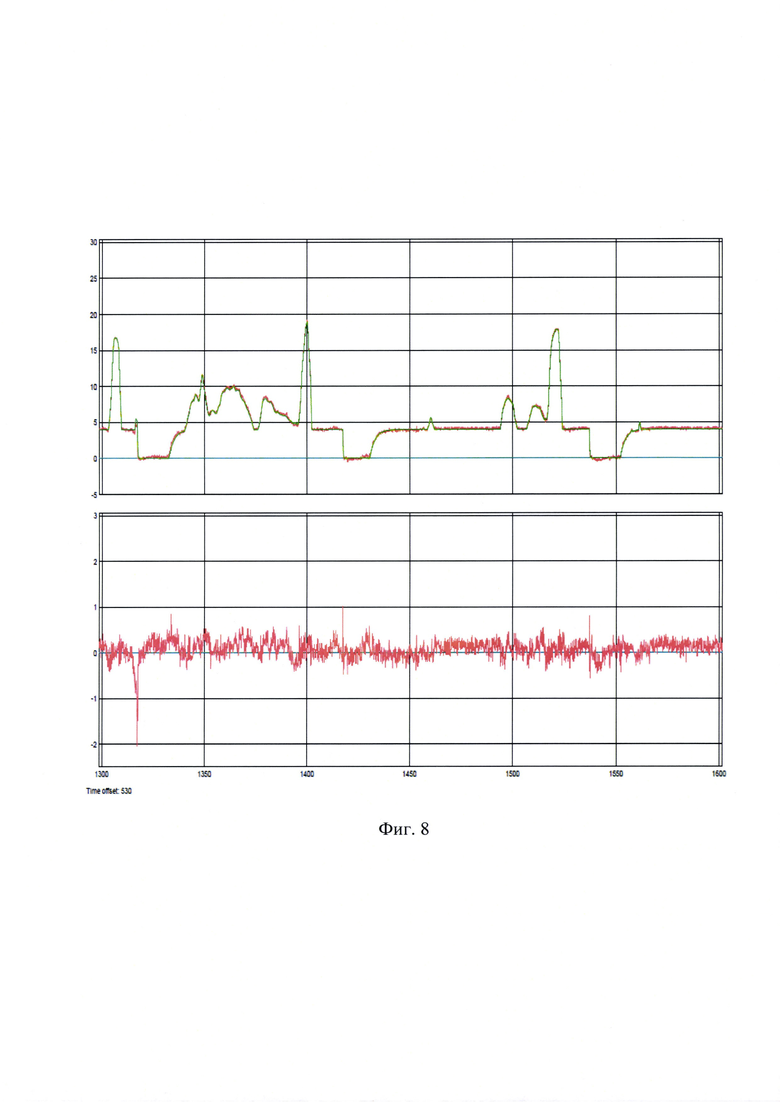
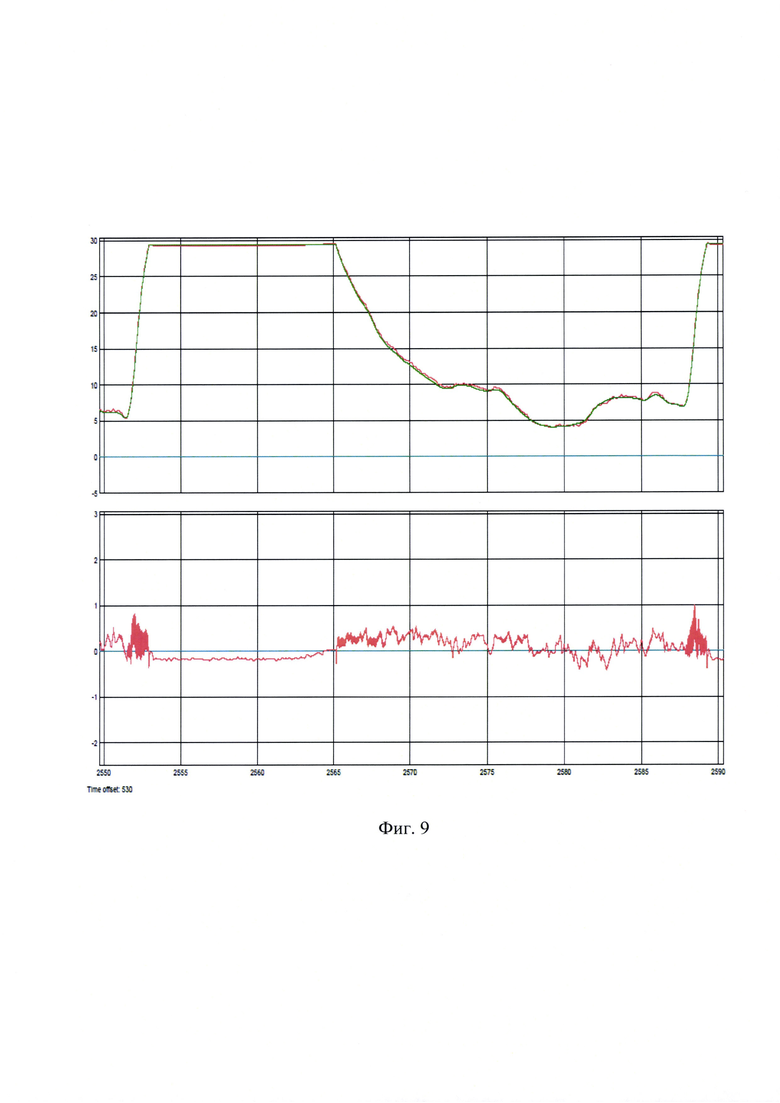
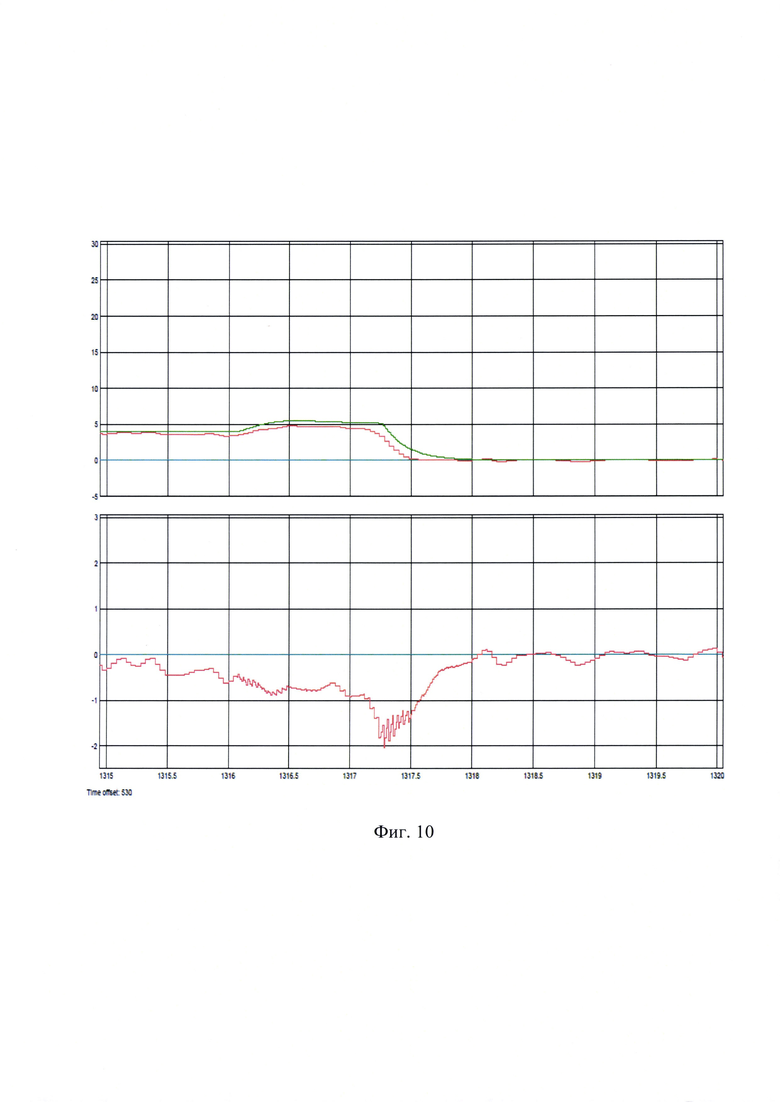
На фиг. 7 - фиг. 10 изображены результаты моделирования углового отклонения подвижной составной части носителя, на которой установлена антенна, на откорректированной математической модели в промежутках времени моделирования соответственно 0-4970 секунд (Фиг. 7), 1300-1600 секунд (Фиг. 8), 1315-1320 секунд (Фиг. 9) и 2550-2590 секунд (Фиг. 10). Математическая модель откорректирована по результатам испытаний экземпляра носителя, на котором установлена система «запрос-ответ». Представлены результаты моделирования поведения откорректированной математической модели при подаче на ее входы в реальном времени сигналов управления системой управления. Верхняя часть соответствующей фигуры представляет угловое положение подвижной составной части носителя, измеренное (красный цвет) при испытаниях экземпляра носителя, на котором установлена система «запрос-ответ», и угловое положение подвижной составной части носителя, рассчитанное (зеленый цвет) откорректированной математической моделью, нижняя часть соответствующей фигуры представляет расхождение между угловым положением, измеренным при испытаниях экземпляра носителя, и угловым положением, рассчитанным откорректированной математической моделью.
Сущность изобретения заключается в том, что отсутствующую информацию об угловом направлении антенны на цель относительно носителя формируют при помощи обработки в реальном времени команд для системы управления подвижной составной частью носителя, на которой установлена антенна. Обработка команд проводится по алгоритму, определенному математической моделью динамической механической системы «система управления подвижной составной частью носителя - подвижная составная часть носителя», при этом значения параметров математической модели формируются на этапе проектирования носителя и уточняются по результатам испытаний экземпляра носителя, на котором установлена система «запрос-ответ». Алгоритм реализован в виде программы для цифрового вычислительного устройства, исполняемой в реальном времени. Входной информацией для программы являются текущие значения команд системе управления подвижной частью носителя, на которой установлена антенна. Программа вычисляет текущее угловое направление подвижной части носителя относительно носителя, и, соответственно, текущее угловое направление антенны относительно носителя. Сформированное таким образом текущее значение углового направления антенны используется далее в системе «запрос-ответ».
Способ определения координат цели в системе «запрос-ответ» осуществляется следующим образом.
1. На этапе проектирования определяют динамическую механическую систему «система управления подвижной составной частью носителя - подвижная составная часть носителя» и ее параметры, обеспечивающие требуемые законы управления подвижной составной частью носителя.
Например, для носителя, на котором применено заявляемое техническое решение, определенная по результатам проектирования носителя динамическая модель механической системы имеет вид, представленный на фиг. 1.
На основе динамической модели механической системы создают математическую модель, на входы которой в реальном времени подают сигналы управления механической системой, и на выходе которой в реальном времени имеется вычисленное математической моделью угловое отклонение подвижной составной части носителя.
Например, для носителя, на котором применено заявляемое техническое решение, исходная математическая модель может быть представлена в виде, изображенном на фиг. 2.
Параметры математической модели представляют в виде неизменяемого номинального значения, определяемого на этапе проектирования носителя, и добавки, определяемой на испытаниях изготовленного экземпляра носителя, на котором установлена система «запрос-ответ». На основе указанной математической модели формируют алгоритм и исполняемую программу реализации математической модели, обрабатывающую в реальном времени значения команд управления системе управления подвижной составной частью носителя. Выходными данными исполняемой программы реализации математической модели являются вычисленные значения текущего углового направления антенны относительно носителя.
2. В процессе испытаний экземпляра носителя, на котором установлена система «запрос-ответ», проводят уточнение параметров (определение значений добавок к номинальным значениям параметров) математической модели, алгоритма и исполняемой программы реализации математической модели известными методами, например, путем задания в реальном времени различных значений команд управления, и фиксации в реальном времени действительных значений углового направления антенны. Затем такие же значения команд управления подают на вход программы реализации математической модели и фиксируют выходные значения, вычисленные программой. Корректировку параметров математической модели производят заданием соответствующих значений добавок и повторным прогоном программы, задавая значения добавок так, чтобы разница между действительными значениями углового направления антенны и определенными программой выходными значениями была минимальной.
Например, после изготовления экземпляра носителя, на котором применено заявляемое техническое решение, в процессе его испытаний на входы системы управления подвижной составной частью носителя подавались в реальном времени входные сигналы управления и измерялось угловое положение подвижной составной части носителя. Значения входных сигналов управления и углового положения подвижной составной части носителя сохранялись в виде массивов данных с привязкой к текущему времени. Графики изменения во времени углового положения подвижной составной части носителя показаны на фиг. 3 - фиг. 10 (верхняя часть рисунка) красным цветом.
Затем сигналы управления из сохраненных массивов данных подавались на входы математической модели, и с помощью пакета программ Matlab-Simulink вычислялось текущее выходное значение углового положения подвижной составной части носителя, выдаваемое математической моделью. Графики вычисленного значения углового положения показаны на фиг. 3 - фиг. 10 (верхняя часть рисунка) зеленым цветом.
Полученные угловые положения сравнивались с фактическими угловыми положениями, взятыми из массивов данных, полученных при испытаниях экземпляра носителя. На графиках видно (нижняя часть фиг. 3 - фиг. 6), что в промежутках времени от 1317 до 1321 секунды, от 1417 до 1421 секунды и от 1537 до 1541 секунды значения углового положения, вычисленные исходной математической моделью, значительно отличаются от измеренных фактических значений, а в промежутках от 2550 до 2555 секунды и от 2585 до 2590 секунд превышают 1 градус. В результате анализа данных установлено, что отличие связано с недостаточной скоростью изменения и с запаздыванием во времени выходного параметра математической модели по сравнению с измеренными значениями. Для приведения математической модели в соответствие с фактическими значениями потребовалось установить значение добавки d1 равной 0,5, d2 оставить нулевой, d3 установить равной 0,02, а d4 установить равной минус 1,8.
После корректировки значений параметров математической модели и повторного прогона модели в пакете программ Matlab-Simulink по результатам (фиг. 7 - фиг. 10) видно, что разница между реально измеренными и вычисленными значениями углового положения подвижной составной части носителя не превышает одного градуса на всем протяжении моделирования, кроме одного периода длительностью менее 0,5 секунды. Достигнутая точность воспроизведения реального углового отклонения подвижной составной части носителя полностью удовлетворяет техническим требованиям.
3. В процессе эксплуатации системы проводят пеленгацию цели (т.е. определяют направление на цель в азимутальной плоскости XLsk0ZLsk ЛСК антенны в виде угла отклонения α от оси 0XLsk проекции направления на цель на плоскость XLsk0ZLsk) в процессе выполнения циклов «запрос носителя - ответ цели», а также выделение из ответов цели информации о ее высоте.
4. По направлению α на цель, вычисленному в процессе выполнения циклов «запрос - ответ», определяют плоскость азимутального пеленга на цель, перпендикулярную плоскости XLSk0ZLsk ЛСК антенны, как два вектора [X1Lsk, Y1lsk, Z1LSk], [X2lSK, Y2Lsk, Z2Lsk] (или три точки [X0Lsk=0, Y0lsk=0, Z0lsk=0], [X1lSk, Y1lsk, Z1lsk], [X2lsk, Y2lsk, Z2lsk]) границ основного лепестка ДН антенны в плоскости азимутального пеленга, при этом для ширины полезного сектора ДН антенны 60° в угломестной плоскости ЛСК антенны координаты векторов будут:

5. Пересчитывают координаты векторов границ основного лепестка ДН антенны из ЛСК антенны в НСК носителя, используя информацию о положении носителя в пространстве и результат работы программы реализации математической модели - информацию об угловом направлении антенны относительно носителя. Для пересчета формируют матрицу преобразования составляющих вектора в соответствии с ГОСТ 20058-80, и используют ее для пересчета координат:


где ψ, ϑ, γ, β, ε - значения поворотов на углы рыскания, тангажа и крена системы координат ССК относительно НСК, на углы азимутального и угломестного смещения ЛСК относительно ССК соответственно. Угол азимутального смещения ЛСК относительно ССК определяется конструкцией носителя и не изменяется в процессе эксплуатации. Угломестное смещение ЛСК относительно НСК определяется как выходной результат работы в реальном времени программы реализации математической модели, на вход которой подаются текущие значения команд управления системе управления подвижной составной частью носителя, на которой установлена антенна.
6. Определяют в НСК плоскость высоты цели (по значению высоты цели, полученному в процессе выполнения циклов «запрос-ответ»), и сферу равной дальности до цели вычисленную в процессе выполнения циклов «запрос-ответ» по значению временной задержки от выдачи запроса до получения ответа от цели:
где А - высота, полученная от цели;
ALa - высота носителя;
D - дальность до цели, вычисленная в процессе выполнения циклов «запрос-ответ».
7. Определяют координаты возможных местоположений цели решением системы уравнений, представляющих в НСК плоскость азимутального пеленга на цель, плоскость высоты цели и сферу равной дальности до цели:
где [X0_NSK; Y0_NSK; Z0_NSK]=[0; 0; 0];
В результате решения системы уравнений будут определены точки пересечения указанных двух плоскостей и сферы:
где



h=А-АЛА.
8. Из координат возможных местоположений цели отбирают координаты того местоположения, которое находится в пределах границ основного лепестка ДН антенны и имеет наименьшее угловое расхождение с направлением целеуказания. Для оценки углового расхождения возможного направления на цель и вектора целеуказания производят пересчет координат вектора целеуказания из ЛСК антенны, в которой направление целеуказания совпадает с направлением оси X и имеет координаты [1, 0, 0]T, в НСК:
Угловое расхождение векторов возможного направления на цель и вектора целеуказания производится определением косинусов углов расхождения векторов:


и выбором того из векторов, для которого угол расхождения меньше (т.е. косинус соответствующего угла больше).
Координаты отобранного местоположения используют в качестве координат цели.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и система для определения координат цели в системе "запрос-ответ" | 2016 |
|
RU2666360C1 |
| Способ и система определения координат цели в системе запрос-ответ | 2016 |
|
RU2631117C1 |
| Система для определения координат цели в системе запрос-ответ | 2021 |
|
RU2778018C1 |
| Способ определения координат цели в системе запрос-ответ | 2021 |
|
RU2778019C1 |
| Способ определения координат целей с помощью аппроксимированной пеленгационной характеристики | 2021 |
|
RU2777849C1 |
| Система для определения координат цели | 2020 |
|
RU2742944C1 |
| СПОСОБ ОПТИМАЛЬНОЙ ПРИВЯЗКИ К ПОДВИЖНОЙ НАЗЕМНОЙ ЦЕЛИ И ПРОГНОЗА ЕЁ ПАРАМЕТРОВ НА ОСНОВЕ МОДИФИЦИРОВАННОЙ, ИНВАРИАНТНОЙ К РЕЛЬЕФУ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ УГЛОМЕСТНОЙ ПРОЦЕДУРЫ РАСЧЁТА ДАЛЬНОСТИ | 2016 |
|
RU2617373C1 |
| СПОСОБ ОПТИМАЛЬНОЙ ПРИВЯЗКИ К ПОДВИЖНОЙ НАЗЕМНОЙ ЦЕЛИ И ПРОГНОЗА ЕЁ ПАРАМЕТРОВ НА ОСНОВЕ СУБОПТИМАЛЬНОЙ ПРОЦЕДУРЫ УГЛОВОГО СОПРОВОЖДЕНИЯ | 2016 |
|
RU2621374C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ПРИЦЕЛИВАНИЯ ПО ПОДВИЖНОЙ НАЗЕМНОЙ ЦЕЛИ | 2016 |
|
RU2629130C1 |
| ЗАЩИЩЕННЫЙ СПОСОБ ОПТИМАЛЬНОЙ ПРИВЯЗКИ К ПОДВИЖНОЙ НАЗЕМНОЙ ЦЕЛИ | 2019 |
|
RU2713584C1 |
Изобретение относится к области радиолокации и может быть использовано в системах вторичной радиолокации при определении координат цели в системе «запрос-ответ». Технический результат изобретения заключается в обеспечении возможности определения координат цели в системе «запрос-ответ», установленной на носителях, для которых получение требуемой данной системой информации об угловом смещении локальной системы координат (ЛСК) антенны относительно связанной системы координат (ССК) носителя невозможно, в частности, возможности адаптации системы «запрос-ответ» к экземпляру носителя, на котором установлена система, за счет учета особенностей подвижной составной части, установленной на экземпляре носителя. Способ определения координат цели в системе «запрос-ответ» с использованием антенны, имеющей заданное направление прицеливания, объединяет параметры, которые отражают положение цели, положение носителя антенны и направление прицеливания антенны, установленной на подвижной составной части носителя. Причем в качестве параметров используют расстояние от носителя до цели, высоту цели, высоту и угловое положение носителя в пространстве, угловое направление антенны на цель относительно носителя, а также текущие значения команд системе управления подвижной составной частью носителя, на которой установлена антенна. Угловое направление антенны на цель относительно носителя определяют как результат обработки в реальном времени текущих значений команд системе управления подвижной составной частью носителя, на которой установлена антенна. 10 ил.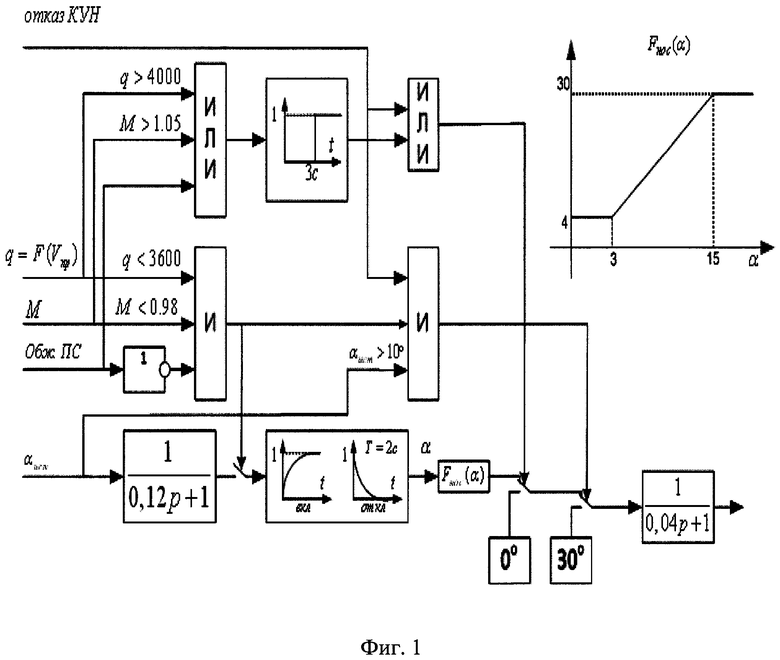
Способ определения координат цели в системе «запрос-ответ» с использованием антенны, имеющей заданное направление прицеливания, и объединяющий параметры, которые отражают положение цели, положение носителя антенны и направление прицеливания антенны, причем в качестве параметров используют расстояние от носителя до цели, высоту цели, высоту и угловое положение носителя в пространстве, угловое направление антенны на цель относительно носителя, при этом способ включает следующие последовательно осуществляемые этапы: получают с помощью системы «запрос-ответ» ответные сигналы от цели и определяют азимутальное направление на цель в плоскости X0Z локальной системы координат (ЛСК) антенны; по вычисленному азимутальному направлению на цель определяют плоскость азимутального пеленга на цель в ЛСК антенны, перпендикулярную плоскости X0Z ЛСК, путем задания в плоскости азимутального пеленга трех точек в границах основного лепестка диаграммы направленности (ДН) антенны или двух векторов границ основного лепестка ДН антенны; определяют угловое направление антенны на цель относительно носителя; определяют плоскость азимутального пеленга на цель в нормальной системе координат (НСК) путем пересчета координат трех точек или двух векторов границ основного лепестка ДН антенны из ЛСК антенны в НСК с использованием определенного на предыдущем этапе углового направления антенны на цель относительно носителя; определяют плоскость высоты цели в НСК, используя полученную от цели с помощью системы «запрос-ответ» информацию о высоте цели; определяют сферу равной дальности до цели, используя дальность до цели, получаемую преобразованием интервала времени от выдачи запроса до получения ответа от цели; вычисляют возможные положения цели в НСК, как координаты точек пересечения плоскости азимутального пеленга, плоскости высоты цели и сферы равной дальности до цели; определяют углы между вектором целеуказания и каждым из направлений на возможные местоположения цели; производят отбор местоположения, для которого указанный угол имеет наименьшее значение; координаты отобранного местоположения используют в качестве координат цели, отличающийся тем, что в качестве параметров дополнительно используют значения команд системе управления подвижной составной частью носителя, на которой установлена антенна, при этом угловое направление антенны на цель относительно носителя определяют как результат обработки в реальном времени текущих значений команд системе управления подвижной составной частью носителя, на которой установлена антенна, причем команды системе управления обрабатываются по алгоритму, определенному математической моделью динамической механической системы «система управления подвижной составной частью носителя - подвижная составная часть носителя», а значения параметров математической модели формируются на этапе проектирования носителя и уточняются по результатам испытаний экземпляра носителя, на котором установлена система «запрос-ответ».
| Способ и система для определения координат цели в системе "запрос-ответ" | 2016 |
|
RU2666360C1 |
| Способ и система определения координат цели в системе запрос-ответ | 2016 |
|
RU2631117C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ВЫСОКОТОЧНОГО ОДНОЭТАПНОГО ПЕЛЕНГАТОРА И АДРЕСНО-ОТВЕТНОЙ ПАКЕТНОЙ ЦИФРОВОЙ РАДИОЛИНИИ В ДКМВ ДИАПАЗОНЕ | 2016 |
|
RU2613369C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОПОЗНАВАНИЯ С ОБЕСПЕЧЕНИЕМ ВОЗМОЖНОСТИ УСТАНОВЛЕНИЯ ПОДЛИННОСТИ ЗАПРОСНОГО СИГНАЛА | 2002 |
|
RU2242020C2 |
| FR 3023009 B1, 14.10.2016 | |||
| ГЕНЕРИРУЮЩАЯ АЭРОЗОЛЬ СИСТЕМА С УЛУЧШЕННЫМ ЭЛЕКТРИЧЕСКИМ РАЗЪЕМОМ | 2021 |
|
RU2838196C1 |
| CN 106872952 A, 20.06.2017 | |||
| CN 105445733 A, 30.03.2016 | |||
| WO 2017220461 A1, 28.12.2017. | |||

