Изобретение относится к сельскому хозяйству и может быть использовано на животноводческих фермах.
Известна конструкция фермы, которая снабжена подвесными рельсовыми дорогами, на роликах которых закреплены с возможностью поперечного перемещения общие продольные стены (RU 2044474 С1, 27.09.1995).
Недостатком известной конструкции является то, что она не позволяет нивелировать строительные и монтажные погрешности силового каркаса здания, а также размещать рельсы в требуемых произвольных местах фермы для перемещения робота.
Технической задачей изобретения является создание конструкции, позволяющей нивелировать строительные и монтажные погрешности силового каркаса здания, неточности в установке и ориентации привалочных плоскостей и закладных элементов силового каркаса здания, а также размещать рельсы в требуемых произвольных местах фермы для перемещения робота.
Техническим результатом является возможность точного размещения и ориентирования подвижной каретки робота относительно технологических станков.
Технический результат достигается тем, что конструкция подвесного рельсового пути для передвижения беспилотного автономного робота содержит рельсы, по которым движутся опорные ролики робота, соединенные между собой нервюрами, стрингер, связывающий нервюры, по которому движется приводной ролик робота, раскосы, придающие жесткость конструкции, при этом рельс изготовлен из бесшовной трубы круглого сечения, а рабочей областью рельса является внешняя поверхность трубы в верхней полуплоскости. Подвесной рельсовый путь крепится к промежуточным конструктивным элементам, которые, в свою очередь, уже крепятся к силовому каркасу здания.
Диаметр трубы составляет 20 - 30 мм, а толщина трубы - 2 - 3,5 мм, расстояние между рельсами - 200-800 мм. Длина рельсовой плети - 2000-6000 мм.
Технический результат достигается в указанных выше диапазонах, что показали экспериментальные исследования.
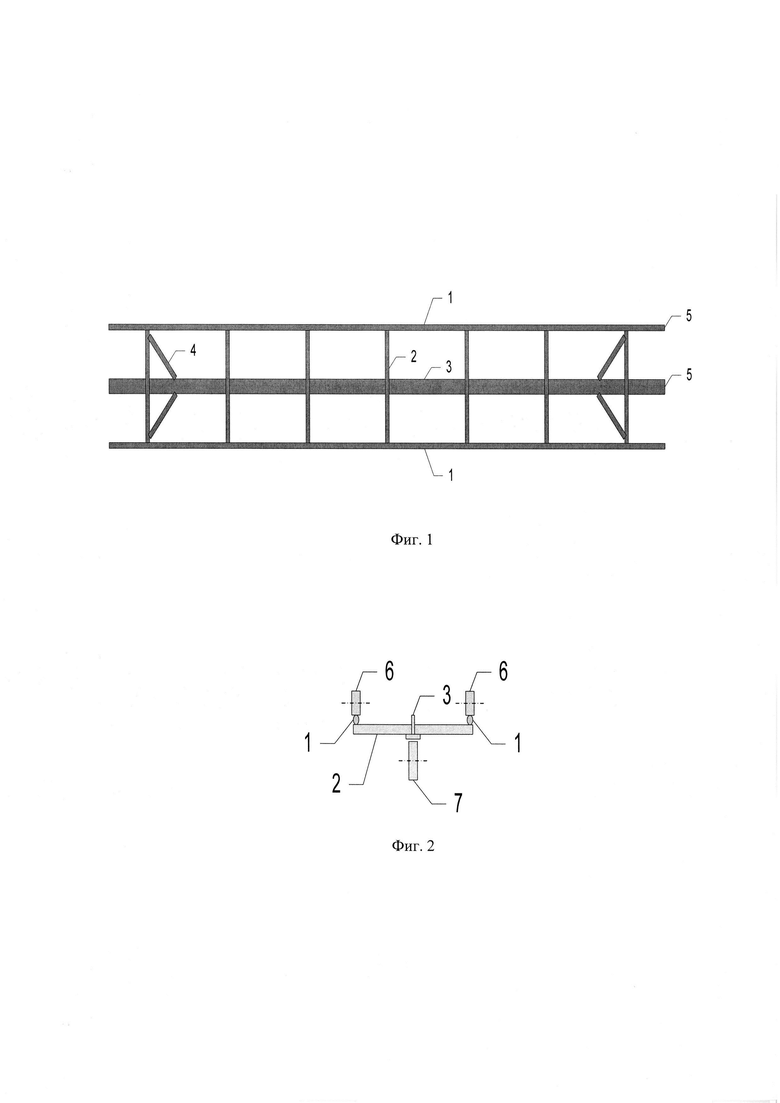
На фиг. 1 представлен вид сверху конструкции.
На фиг. 2 представлен вид спереди.
Конструкция предназначена для формирования направляющих, опорных и тяговых поверхностей, по которым перемещается подвижная часть беспилотного автономного робота (далее каретка).
Рельсовый путь представляет из себя клепано-сварную конструкцию. Изготавливается изделие из нержавеющей стали. Учитывая коррозионные требования и требования свариваемости, а также требования минимизации межкристаллитной коррозии, предпочтительная марка стали AISI 316L, а также ее аналоги.
Конструкция изделия (вид сверху) показана на фиг. 1. Типовая длина рельсовой плети может варьироваться от 2 до 6 м, ширина рельсовой колеи - от 200 до 800 мм. Обозначения: 1 - рельсы, 2 - нервюры, 3 - стрингер, 4 - раскосы, 5 - соединительные узлы 5, 6- опорные ролики, 7 - приводной ролик.
Рельсы 1 изготавливаются из бесшовной холоднодеформированной прецизионной трубы, диаметр которой варьируется в диапазоне от 20 до 30 мм, толщина стенки - от 2 до 3.5 мм. Основная функция рельсов - формирование направляющих и опорных поверхностей. Рабочей областью рельса является внешняя поверхность трубы в верхней полуплоскости.
Нервюры 2 изготавливаются из неравнополочного уголка. Нервюры 2, помимо связывания рельсов 1 между собой, несут также функцию крепления рельсового пути к промежуточным конструктивным элементам, которые, в свою очередь, уже крепятся к силовому каркасу здания.
Стрингер 3 изготавливается либо из тавра, либо из швеллера. Стрингер 3, помимо продольного связывания между собой нервюр 2, несет также функцию тяговой плоскости, для фрикционного привода каретки (на чертеже не показано).
Раскосы 4 изготавливаются из равнополочного уголка. Основная функция раскосов 4 - подкрепление и создание жесткости рельсовой плети.
Соединительные узлы 5 в торцах рельсов 1 и стрингера 3 предназначены для жесткого скрепления рельсовых плетей между собой с образованием единого непрерывного рельсового пути требуемой длины. Конструкция соединительных узлов 5 обеспечивает перепад высот и зазор между опорными поверхностями рельсов и тяговых плоскостей соединяемых рельсовых плетей - не более 0.2 мм.
Опорные ролики 6 предназначены для подвешивания каретки робота к рельсам. Контактный слой опорных роликов 6 изготавливается из полимера (для снижения вибраций, шума и износа рельсового пути) и имеет либо U-, либо V-профиль. В оси опорных роликов 6 монтируются закрытые подшипники качения из нержавейки.
Приводной ролик 7 в контакте с тяговой плоскостью предназначен для передачи вращающего момента и преобразования вращательного движения в поступательное. Контактный слой приводного ролика изготавливается из резины (для снижения вибраций, шума, износа рельсового пути и повышения контактного трения) и имеет плоский, либо трапецеидальный профиль.
Конструкция позволяет нивелировать строительные и монтажные погрешности силового каркаса здания, неточности в установке и ориентации привалочных плоскостей и закладных элементов силового каркаса здания и произвести точное размещение и ориентирование каретки относительно технологических станков.
Изобретение относится к сельскому хозяйству и может быть использовано на животноводческих фермах. Техническим результатом является возможность точного размещения и ориентирования каретки относительно технологических станков. Технический результат достигается тем, что конструкция подвесного рельсового пути для передвижения беспилотного автономного робота содержит рельсы, по которым движутся опорные ролики робота, соединенные между собой нервюрами, стрингер, связывающий нервюры, по которому движется приводной ролик робота, раскосы, придающие жесткость конструкции, при этом рельс изготовлен из бесшовной трубы круглого сечения, а рабочей областью рельса является внешняя поверхность трубы в верхней полуплоскости. 1 з.п. ф-лы, 2 ил.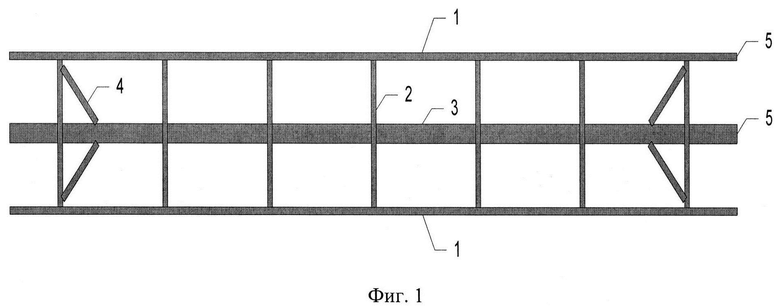
1. Конструкция подвесного рельсового пути для передвижения беспилотного автономного робота, характеризующаяся тем, что содержит рельсы, по которым движутся опорные ролики робота, соединенные между собой нервюрами, стрингер, связывающий нервюры, по которому движется приводной ролик робота, раскосы, придающие жесткость конструкции, при этом рельс изготовлен из бесшовной трубы круглого сечения, а рабочей областью рельса является внешняя поверхность трубы в верхней полуплоскости.
2. Конструкция по п. 1, характеризующаяся тем, что диаметр трубы составляет 20-30 мм, а толщина трубы 2-3,5 мм, расстояние между рельсами 200-800 мм, длина рельсовой плети 2000-6000 мм.
| US 20120067246 A1, 22.03.2012 | |||
| Вибрационная испытательная машина | 1959 |
|
SU142447A1 |
| СПОСОБ ПОЛУЧЕНИЯ КРЕМНИЙОРГАНИЧЕСКИХ 1,3-БУТАДИЕНОВЫХ ЭФИРОВ | 0 |
|
SU193512A1 |
| ТРАНСПОРТНАЯ СИСТЕМА ДЛЯ ПЕРЕВОЗКИ СЫПУЧИХ И НЕСЫПУЧИХ ГРУЗОВ | 1994 |
|
RU2061608C1 |
| ЖИВОТНОВОДЧЕСКАЯ ФЕРМА | 1992 |
|
RU2044474C1 |
| Монорельсовая система | 2015 |
|
RU2609552C1 |

