Изобретение относится к области транспортных средств с колесными и шарнирно-рычажными движителями.
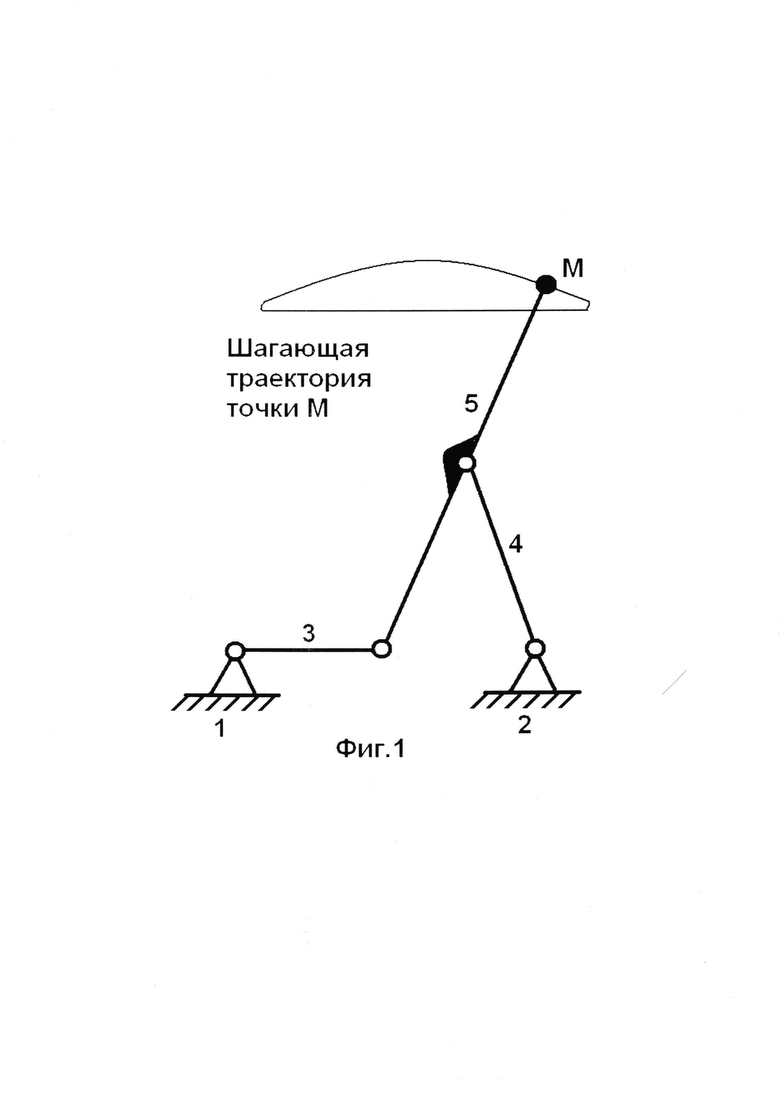
Известно транспортное средство, в котором применен четырехзвенный, если считать корпус, лямбдаобразный механизм П.Л. Чебышева, состоящий из корпуса, на котором закреплены шарниры 1 и 2 ведущего кривошипа 3, коромысла 4 и шатуна 5. Схема лямбдаобразного механизма показана на фиг. 1. Описание этого механизма приведено в книге: Полное собрание сочинений П.Л. Чебышева. Том.4. Теория механизмов. - Москва-Ленинград: Издательство Академиии наук СССР, 1948 г. - С. 165, в статье П.Л. Чебышева в этой книге «О преобразовании вращательного движения в движение по некоторым линиям» на стр. 161-165, к которой имеется электронный режим доступа http://www.tcheb.ru/1. Лямбдаобразный механизм П.Л. Чебышева позволяет получить природную шагающую траекторию движения стопы человека или копыта животного, по которой движется рабочая точка М шатуна 5.
Известна шагающая машина П.Л. Чебышева, в которой применена система из двух пар лямбдаобразных механизмов: И.И. Артоболевский, Н.И. Левитский. Модели механизмов П.Л. Чебышева / В кн.: Полное собрание сочинений П.Л. Чебышева. Том IV. Теория механизмов. - M. - Л.: Изд-во АН СССР, 1948, С. 227-228. В этом транспортном средстве движение двух лямбдаобразных механизмов в каждой паре синхронизировано промежуточным шатуном.
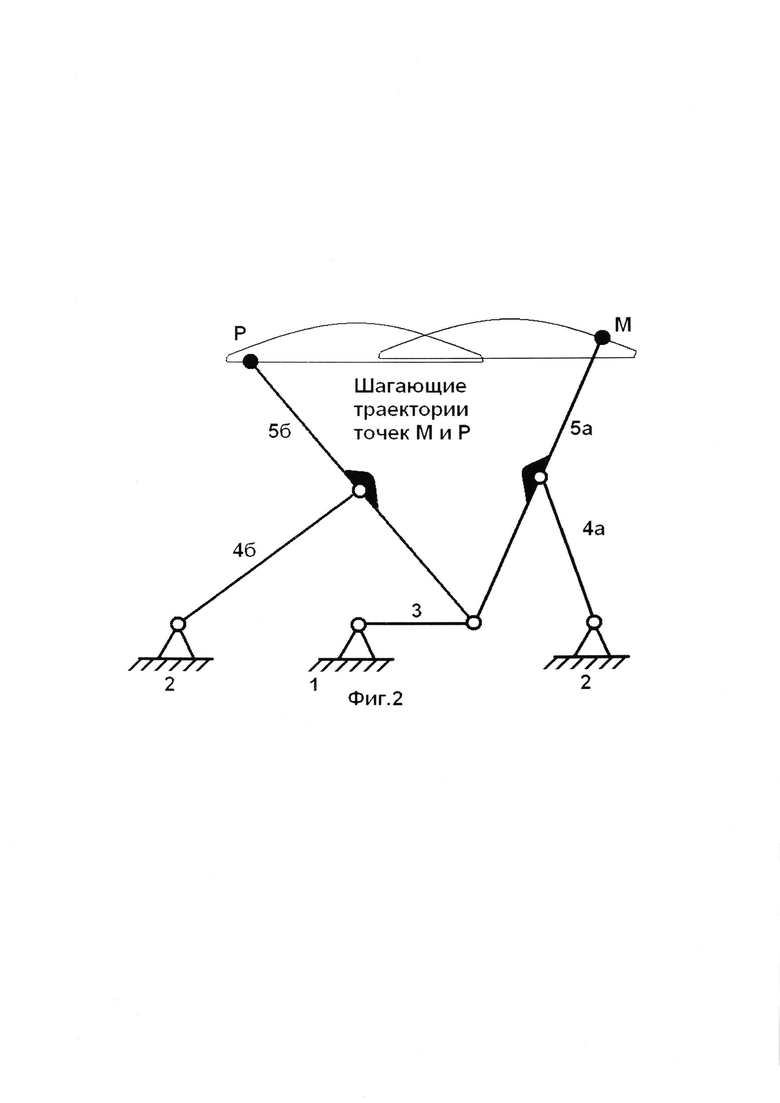
В качестве прототипа для изобретения была выбрана лодка П.Л. Чебышева, в которой применен двойной лямбдаобразный механизм. Схема этого механизма показа на фиг. 2. Описание двойного лямбдаобразного механизма как части гребного устройства содержится в книге: И.И. Артоболевский, Н.И. Левитский. Модели механизмов П.Л. Чебышева / В кн.: Полное собрание сочинений П.Л. Чебышева. Том IV. Теория механизмов. - М. - Л.: Изд-во АН СССР, 1948, С. 228-229. Функциональной особенностью прототипа как транспортного средства является принципиальная возможность перевода движителя из нормальной схемы конфигурации при движении по воде в нештатную схему при движении по отмели, о чем свидетельствует фотография, размещенная в цитируемой литературе. Конструкционной особенностью прототипа является закрепление на одном кривошипе 3 сразу двух шатунов 5а и 5б, каждый из которых дополнительно шарнирно соединен с коромыслами 4а и 4б соответственно, как в отдельном единичном лямбдаобразном механизме П.Л. Чебышева. Кривошип 3, коромысла 4а и 4б соединены с корпусом цилиндрическими шарнирами 1 и 2 как с единым звеном механизма. Двойной лямбдаобразный механизм П.Л. Чебышева позволяет получить сразу две рабочие точки М и Р, которые двигаются по шагающим траекториям. Хотя шагающие траектории пересекаются, рычаги не мешают работе друг друга, потому что из-за симметричности шагающих траекторий лямбдаобразные механизмы развернуты друг относительно друга на 180 градусов, что обеспечивает такой же сдвиг по фазе в движении рабочих точек М и Р шатуна друг относительно друга. Недостатком прототипа, как и других шагающих аналогов транспортных средств, является узкая область применения, например, по бездорожью, потому что колесный способ передвижения и колесная конфигурация энергетически более эффективны, надежны и просты. Однако колесо и колесная конфигурация транспортного средства требуют достаточно ровной и твердой опорной поверхности, в противном случае начнется пробуксовка.
Целью изобретения является расширение условий применения транспортного средства с колесной дорожной конфигурацией движителя путем дополнения движителя внедорожной шагающей конфигурацией. Эта цель достигается совмещением колеса, в качестве движителя при дорожной конфигурации транспортного средства с его достоинствами применения на ровной дороге, с преимуществами шагающего шарнирно-рычажного лямбдаобразного механизма П.Л. Чебышева в качестве движителя при внедорожной конфигурации транспортного средства.
Для такого совмещения предложено транспортное средство, в котором допускается возможность перевода движителя из дорожной конфигурации во внедорожную и наоборот, состоящее из корпуса, колесной пары и нескольких лямбдаобразных механизмов, отличающееся тем, что радиус колес больше минимального удаления концевых точек шатунов от оси вращения, но меньше максимального удаления концевых точек шатунов от оси вращения, лямбдаобразные механизмы выполнены с возможностью вращаться вокруг неподвижных кривошипов, колесная пара выполнена с возможностью вращения с шарнирно закрепленными на ней лямбдаобразными механизмами, равномерно распределенными по кругу, при этом на корпусе имеется закрепленный кривошип с возможностью фиксации кривошипа в различных положениях относительно корпуса.
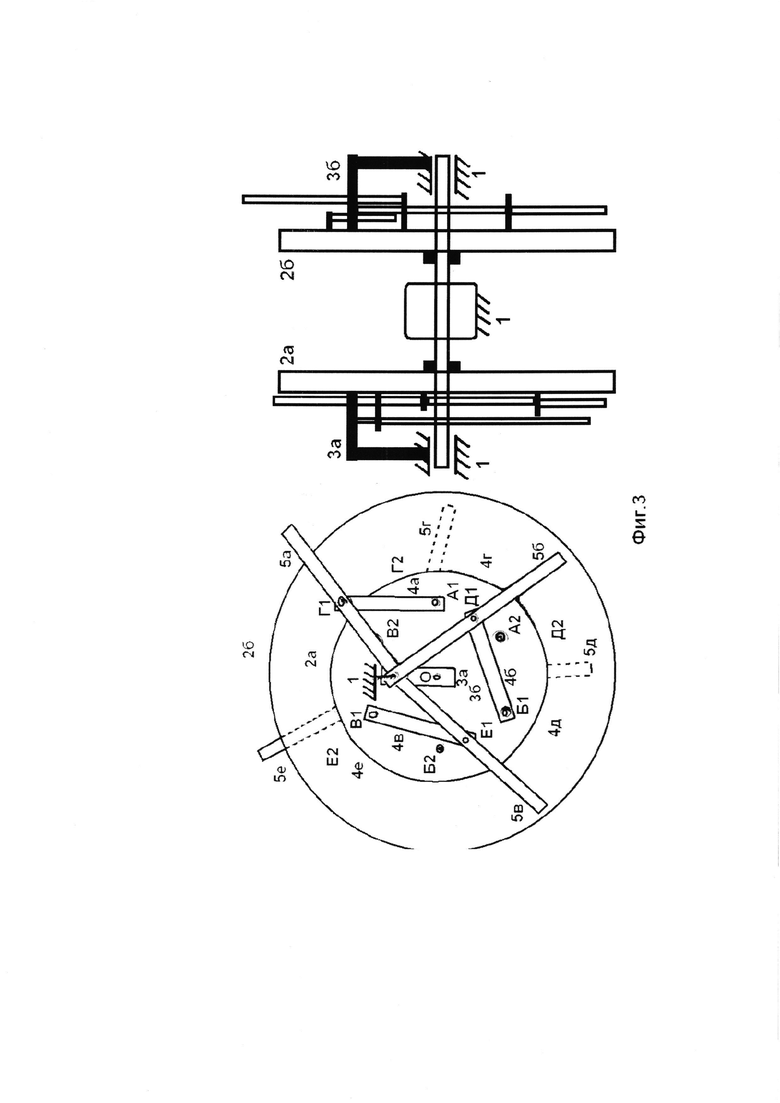
Устройство транспортного средства показано на фиг. 3.
Транспортное средство состоит из корпуса 1 и двух колес 2а и 2б. Колеса 2а и 2б разнесены на некоторое расстояние, позволяющее разместить между ними двигатель. Колеса 2а и 2б закреплены на валу двигателя. Двигатель закреплен на корпусе 1, выполняющем роль звена механизма. Вал двигателя является цилиндрическим шарниром О в кривошипах 3а и 3б. Кривошипы 3а и 3б размещены снаружи колес 2а и 2б и одной своей осью жестко связаны с корпусом 1. С позиции кинематики кривошипы 2а и 3б являются продолжением корпуса 1. Колеса 2а и 2б вместе с валом могут свободно вращаться в цилиндрическом шарнире О кривошипов 3а и 3б. Снаружи колес 2а и 2б размещаются лямбдаобразные механизмы П.Л. Чебышева. Количество лямбдаобразных механизмов может быть произвольным. Три лямбдаобразных механизма свободно размещаются с каждой наружной стороны колес 2а и 2б, а большее количество лямбдаобразных механизмов потребует применить искривленные рычаги для обхода осей вращения. Каждый из кривошипов 3а и 3б является общим рычагом для всех лямбдаобразных механизмов, расположенных с той же стороны колеса, где находится кривошип. Каждый лямбдаобразный механизм имеет две шарнирные точки закрепления на вращающемся колесе. На колесе 2а цилиндрические шарниры коромысел 4а, 4б, 4в обозначены А1, Б1, В1 соответственно. На колесе 2б цилиндрические шарниры коромысел 4г, 4д, 4е обозначены А2, Б2, В2, на фиг. 3 находятся за колесами 2а и 2б. На колесе 2а шатуны 5а, 5б, 5в посредством цилиндрических шарниров соединены с неподвижной осью кривошипа 3а, которая является продолжением корпуса 1. На колесе 2б шатуны 5г, 5д, 5е посредством цилиндрических шарниров соединены с неподвижной осью кривошипа 3б, которая является продолжением корпуса 1. В каждом лямбдаобразном механизме середина шатуна посредством цилиндрического шарнира соединена с коромыслом. На колесе 2а середины шатунов 5а, 5б, 5в соответственно соединены цилиндрическими шарнирами с коромыслами 4а, 4б, 4в в точках Г1, Д1, Е1. На колесе 2б середины шатунов 5г, 5д, 5e соответственно соединены цилиндрическими шарнирами с коромыслами 4г, 4д, 4е в точках Г2, Д2, Е2. Точки А1, А2, Б1, Б2, B1, В2 размещения цилиндрических шарниров в указанном порядке равномерно в угловом отношении размещены на окружности. Для шести лямбдаобразных механизмов угол между двумя любыми соседними точками равен 60 градусов. Колеса 2а и 2б имеют одинаковые диаметры. Диаметры колес 2а и 2б выбраны так, чтобы концы всех шатунов 5а, 5б, 5в, 5г, 5д, 5е при наименьшем удалении от центра О колеса во время движения были удалены на расстояние меньше радиуса колес, а при наибольшем удалении от центра О колеса во время движения удаление этих же концов шатунов было больше радиуса колес 2а и 2б.
Движитель транспортного средства работает по роторному принципу, потому что лямбдаобразные механизмы закреплены на колесах 2а и 2б, а колеса вращаются вокруг оси О, являющейся валом двигателя. Кривошипы 3а и 3б неподвижны. В отличие от традиционного лямбдаобразного механизма П.Л. Чебышева получилась обращенная схема движения. В традиционном лямбдаобразном механизме кривошип вращается вокруг точки О, а шарнирные точки закрепления А1, Б1, B1, А2, Б2, В2 соответственно коромысел 4а, 4б, 4в, 4г, 4д, 4е неподвижны. В шагающем колесе предлагается роторное техническое решение, то есть, наоборот, лямбдаобразные механизмы вращаются вокруг неподвижных кривошипов 3а и 3б, являющихся продолжением корпуса 1. При вращении колес 2а и 2б, закрепленных на валу двигателя и представляющих с ним единую колесную пару, лямбдаобразные механизмы начинают вращаться вместе с колесами. Концы шатунов 5а, 5б, 5в, 5 г, 5д, 5е совершают сразу два движения. Во-первых, это вращательное движение вместе с колесами по окружности. Во-вторых, это шагающее движение по шагающей траектории П.Л. Чебышева, ради которой русским инженером в конце 19-го века был изобретен лямбдаобразный механизм. В результате сложения двух движений концевая рабочая точка каждого шатуна движется по овальной траектории, но центр овала не совпадает с центром О колес 2а и 2б. В фиксированном относительно корпуса 1 положении рабочие точки концов шатунов постоянно находятся на одном и том же удалении от центра О колес 2а и 2б. Это удаление может быть как меньше, так и больше радиуса колес 2а и 2б.
Транспортное средство имеет два режима движения, соответственно две конфигурации движителя, и работает следующим образом.
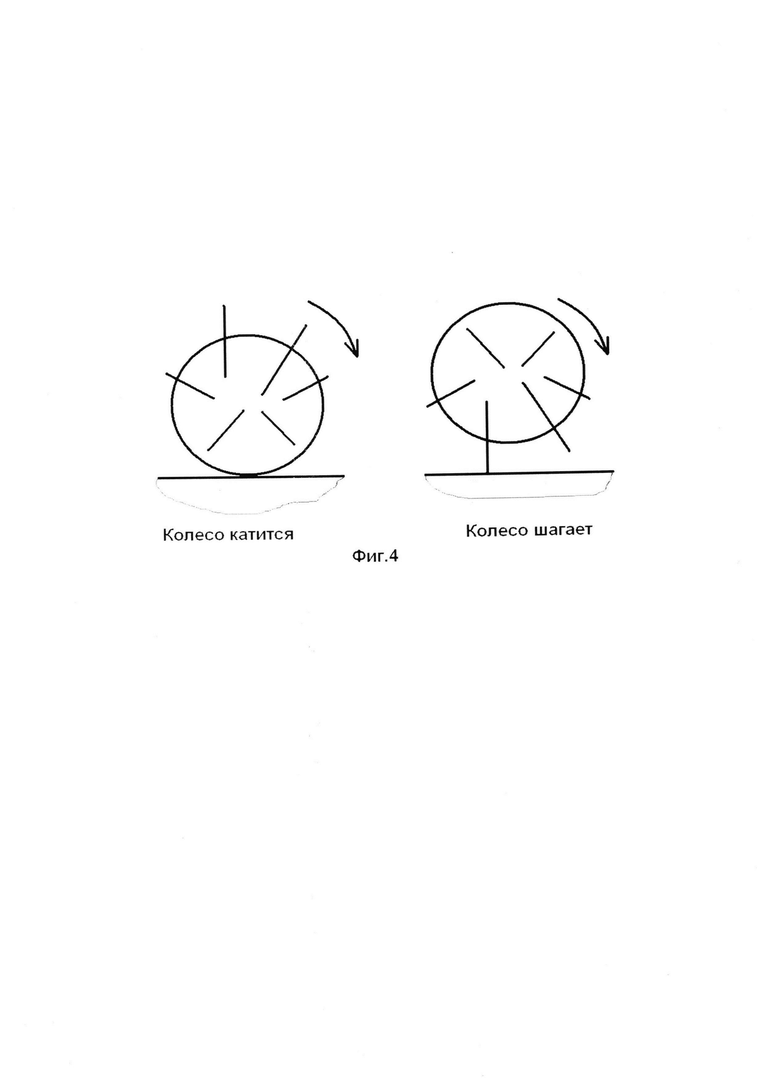
Дорожная конфигурация и дорожный режим работы - это обычное качение колеса по поверхности. Эта конфигурация и режим работы движителя соответствуют схеме расположения шатунов на фиг. 3 в предположении, что опорная поверхность находится снизу, то есть под колесом. Когда концевая рабочая точка очередного шатуна, приближающегося к опорной поверхности, подходит к земле, ее удаление от центра О колес 2а и 2б становится меньше радиуса этих колес В результате этого концевые рабочие точки шатунов никогда не коснутся земли, поэтому транспортное средство будет совершать обычное качение по поверхности. Этот режим работы движителя и конфигурация транспортного средства соответствуют движению по ровной твердой дороге.
Внедорожный режим включается переводом транспортного средства во внедорожную шагающую конфигурацию, когда колесо начинает буксовать на размытой поверхности: грязь, трясина, снег, лед, шуга, то есть когда колесу не хватает зацепления с опорной поверхностью. В этом случае в работу включаются рычаги, то есть шатуны со своими концевыми рабочими точками, совершающими шагающее движение, как в лямбдаобразном механизме П.Л. Чебышева. Чтобы включить шагающий режим движителя и перевести транспортное средство во внедорожную конфигурацию, надо выполнить фазовый разворот механизма на 180 градусов, то есть перевернуть шагающее колесо. Такой переворот и сдвиг по фазе выполняется поворотом кривошипов 3а и 3б как единого звена на 180 градусов. На фиг. 3 кривошипы 3а и 3б ориентированы вертикально вверх от оси вращения О колес 2а и 2б, но если их повернуть вертикально вниз, то это будет равносильно повороту чертежа и всей схемы на 180 градусов. Поворот выполняется рукояткой с последующим закреплением неподвижной оси кривошипов 3а и 3б в новом нижнем положении на корпусе, теперь уже снизу на фиг. 3. После такого поворота кривошипа относительно корпуса рабочие концевые точки шатунов теперь уже в нижней части траектории своего движения по смещенной овальной траектории, а не в верхней, как показано на фиг. 3, удалятся от центра О колес 2а и 2б на расстояние больше радиуса, поэтому приподнимут механизм, войдут в зацепление с опорной поверхностью, устранят проскальзывание колеса, потому что колесо перестанет катиться в традиционном понимании после подъема, и совершат шагающее перемещение механизма.
Схема двух режимов работы и двух конфигураций транспортного средства показана на фиг. 4.
Шагающий режим работы движителя транспортного средства является экстренным, кратковременным, необходимым только для преодоления непроходимого обычным колесом участка. В шагающем режиме работы движителя при внедорожной конфигурации транспортного средства повышены ударные нагрузки, но это необходимо для хорошего зацепления механизма со скользкой поверхностью. После преодоления трудного участка дороги кривошипы 3а и 3б переводятся из нижнего положения в верхнее положение, шагающий режим работы движителя транспортного средства колеса отключается, внедорожная конфигурация переводится в обычную дорожную, включается обычный режим качения колеса без ударных нагрузок.
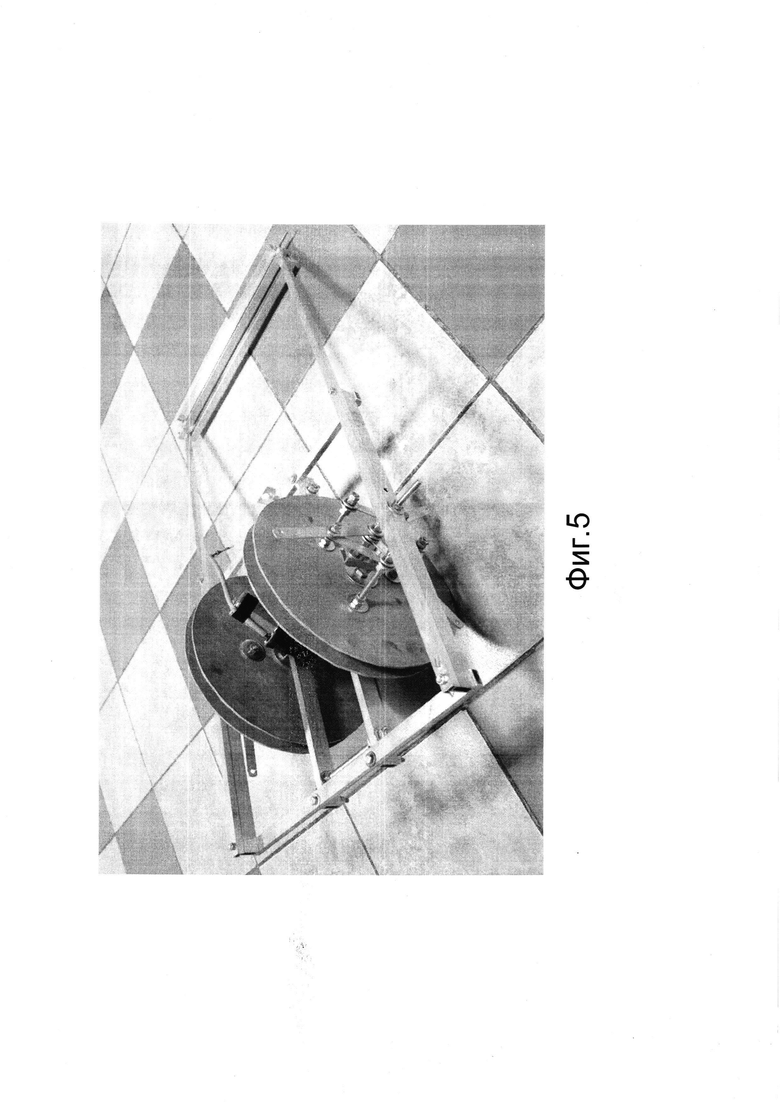
Для доказательства работоспособности предложенного устройства была изготовлена действующая модель, приводимая в движение электродвигателем. Переключение режима работы движителя с качения на шаг, то есть изменение дорожной конфигурации транспортного средства на внедорожную конфигурацию, выполнялось переворотом модели, то есть разворотом кривошипа-корпуса на 180 градусов. Фотография действующей модели показана на фиг. 5 с кривошипом, включенным в режим шага, и выступающими шатунами.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГАЮЩИЙ МЕХАНИЗМ | 2021 |
|
RU2801819C2 |
| МЕХАНИЗМ ШАГАЮЩЕЙ МАШИНЫ | 2017 |
|
RU2712370C2 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН И ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2010 |
|
RU2422317C1 |
| МОСТОВОЙ ШАГАЮЩИЙ ДВИЖИТЕЛЬ | 2011 |
|
RU2501703C2 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1999 |
|
RU2156711C1 |
| Шагающий движитель транспортного средства | 1981 |
|
SU988635A1 |
| НАПРАВЛЯЮЩИЙ РЫЧАЖНО-ШАРНИРНЫЙ МЕХАНИЗМ ДЛЯ ОДНОВРЕМЕННОГО ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ ДВУХ ТОЧЕК В ПРОТИВОПОЛОЖНЫХ НАПРАВЛЕНИЯХ | 2024 |
|
RU2840552C2 |
| Механизм шагающего движителя | 2019 |
|
RU2723923C1 |
| Колесно-шагающий движитель транспортного средства | 2024 |
|
RU2824228C1 |
| Движитель, шагающий колесными опорами | 2020 |
|
RU2763058C1 |
Транспортное средство, в котором допускается возможность перевода движителя из дорожной конфигурации во внедорожную и наоборот, состоит из корпуса, колесной пары и нескольких лямбдаобразных механизмов. Радиус колес больше минимального удаления концевых точек шатунов от оси вращения, но меньше максимального удаления концевых точек шатунов от оси вращения. Лямбдаобразные механизмы выполнены с возможностью вращаться вокруг неподвижных кривошипов. Колесная пара выполнена с возможностью вращения с шарнирно закрепленными на ней лямбдаобразными механизмами, равномерно распределенными по кругу. На корпусе имеется закрепленный кривошип с возможностью фиксации кривошипа в различных положениях относительно корпуса. Достигается расширение области применения. 5 ил.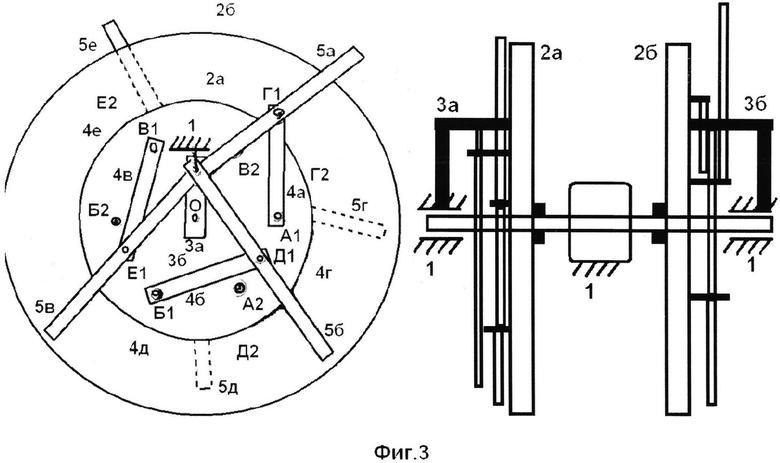
Транспортное средство, в котором допускается возможность перевода движителя из дорожной конфигурации во внедорожную и наоборот, состоящее из корпуса, колесной пары и нескольких лямбдаобразных механизмов, отличающееся тем, что радиус колес больше минимального удаления концевых точек шатунов от оси вращения, но меньше максимального удаления концевых точек шатунов от оси вращения, лямбдаобразные механизмы выполнены с возможностью вращаться вокруг неподвижных кривошипов, колесная пара выполнена с возможностью вращения с шарнирно закрепленными на ней лямбдаобразными механизмами, равномерно распределенными по кругу, при этом на корпусе имеется закрепленный кривошип с возможностью фиксации кривошипа в различных положениях относительно корпуса.
| Способ очистки естественных, крекинговых и подобных газов от сероводорода и других примесей | 1944 |
|
SU65831A1 |
| Приспособление для соединения концов приводных ремней | 1934 |
|
SU43523A1 |
| ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2190552C2 |
| МОСТОВОЙ ШАГАЮЩИЙ ДВИЖИТЕЛЬ | 2011 |
|
RU2501703C2 |
| ШАГАЮЩИЙ ДВИЖИТЕЛЬ-КОЛЕСО | 1996 |
|
RU2104164C1 |
| ШАГАЮЩЕЕ КОЛЕСО ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2044672C1 |
| Устройство для обнаружения аварийных ситуаций при бурении скважин | 1974 |
|
SU713978A1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1993 |
|
RU2063354C1 |

