Изобретение относится к сельскому хозяйству.
Известен животноводческий комплекс, содержащий автоматические устройства с мачтами (RU 2572210 С1, 27.12.2015). недостатком известного устройства заключается в том, что высота мачты не может менять свои габариты.
Техническим результатом предложения является возможность повысить проходимость и расширить область действия автономного робота за счет уменьшения его вертикального габарита в транспортировочном состоянии. Кроме того, повышается устойчивость промышленного робота в транспортировочном состоянии.
Технический результат достигается тем, что конструкция складывающейся мачты беспилотного автономного робота содержит неподвижный сегмент, присоединенный к станине робота, подвижный сегмент, установленный с возможностью перемещения по профильным рельсам, закрепленным на неподвижном сегменте, при этом на подвижном сегменте установлена каретка на профильных рельсах, а неподвижный и подвижный сегменты снабжены приводами для перемещения подвижного сегмента и каретки, соответственно.
Привод подвижного сегмента и каретки снабжены датчиками линейного положения.
Неподвижный сегмент мачты присоединен к станине робота через привалочные плоскости в нижней части и для придания жесткости дополнительно укреплен раскосами в средней и верхней частях.
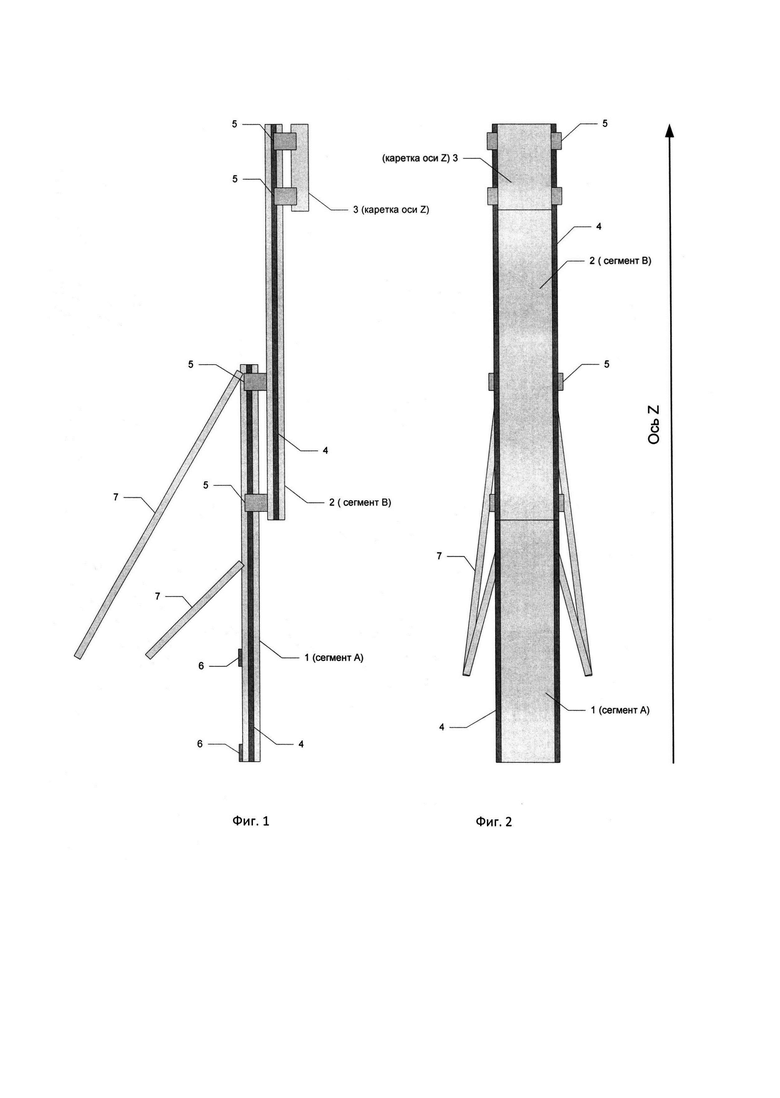
На фиг. 1 представлен вид сбоку конструкция мачты.
На фиг. 2 представлен вид спереди конструкции мачты.
Изделие формирует линейную вертикальную ось (ось Z) промышленного робота.
Конструкция изделия показана на фиг. 1. Линейная вертикальная ось (ось Z) промышленного робота формируется двумя сегментами: А - неподвижный, крепится через привалочные плоскости к станине робота, а также укрепляется (добавляется жесткость) посредством раскосов; В - подвижный, перемещающийся по профильным рельсам, закрепленным на сегменте А. В свою очередь, по профильным рельсам, закрепленным на сегменте В, перемещается каретка оси Z.
Привод сегмента В и каретки оси Z - не регламентируется, в качестве вариантов могут рассматриваться: ШВП, пара шестерня-зубчатая рейка, цепная передача, зубчатая шкиво-ременная передача.
В транспортировочном состоянии сегмент В и каретка оси Z находятся в нижнем положении, таким образом, вертикальный габарит промышленного робота определяется высотой сегмента А. В рабочем состоянии, положения сегмента В и каретки оси Z рассчитываются системой управления роботом исходя из требуемой координаты по оси Z.
Максимальное значение координаты по оси Z достигается при полном вылете сегмента В и максимальном подъеме каретки оси Z. Для повышения точности, динамических характеристик и управляемости оси Z рекомендуется снабдить привод сегмента В и каретки оси Z датчиками линейного положения (абсолютными энкодерами).
Преимуществами конструкции является возможность повысить проходимость и расширить область действия автономного робота за счет уменьшения его вертикального габарита в транспортировочном состоянии (холостые перемещения по осям X и/или Y в плане помещения). Кроме того, повышается устойчивость промышленного робота в транспортировочном состоянии.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНСТРУКЦИЯ ПОДВЕСНОГО РЕЛЬСОВОГО ПУТИ ДЛЯ ПЕРЕДВИЖЕНИЯ БЕСПИЛОТНОГО АВТОНОМНОГО РОБОТА, ФУНКЦИОНИРУЮЩЕГО В УСЛОВИЯХ СВИНОФЕРМЫ ПРОМЫШЛЕННОГО ТИПА | 2021 |
|
RU2778176C1 |
| МОБИЛЬНАЯ АНТЕННАЯ УСТАНОВКА | 1997 |
|
RU2115977C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПОДЛОЖЕК БЕЗ ОБРАЗОВАНИЯ ЧАСТИЦ | 2010 |
|
RU2510546C2 |
| СТАНОК ДЛЯ ИЗГОТОВЛЕНИЯ ДЕРЕВЯННЫХ ИЗДЕЛИЙ | 1994 |
|
RU2072914C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ ВИЛОЧНОГО ПОГРУЗЧИКА | 2010 |
|
RU2547024C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ КРИВОЛИНЕЙНЫХ ОЦИЛИНДРОВАННЫХ БРЕВЕН И ПРОФИЛЬНОГО БРУСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2383432C2 |
| ТРАНСПОРТИРОВОЧНОЕ УСТРОЙСТВО И ПЕЧАТНАЯ МАШИНА | 2007 |
|
RU2440896C2 |
| Универсальный каркасный модуль и система для лазерной обработки протяженных объектов вращения | 2020 |
|
RU2759273C1 |
| Многоцелевой промышленный робот | 1989 |
|
SU1669686A1 |
| СПОСОБ СТАБИЛИЗАЦИИ ДВИЖЕНИЯ ПО ЗУБЧАТОЙ РЕЙКЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2707156C1 |
Изобретение относится к области машиностроения, в частности к складывающимся мачтам беспилотного автономного робота. Складывающаяся мачта беспилотного автономного робота содержит неподвижный сегмент, присоединенный к станине робота, подвижный сегмент, установленный с возможностью перемещения по профильным рельсам, закрепленным на неподвижном сегменте. На подвижном сегменте установлена каретка на профильных рельсах. Неподвижный и подвижный сегменты снабжены приводами для перемещения подвижного сегмента и каретки соответственно. Достигается повышение проходимости и расширение области действия автономного робота. 2 з.п. ф-лы, 2 ил.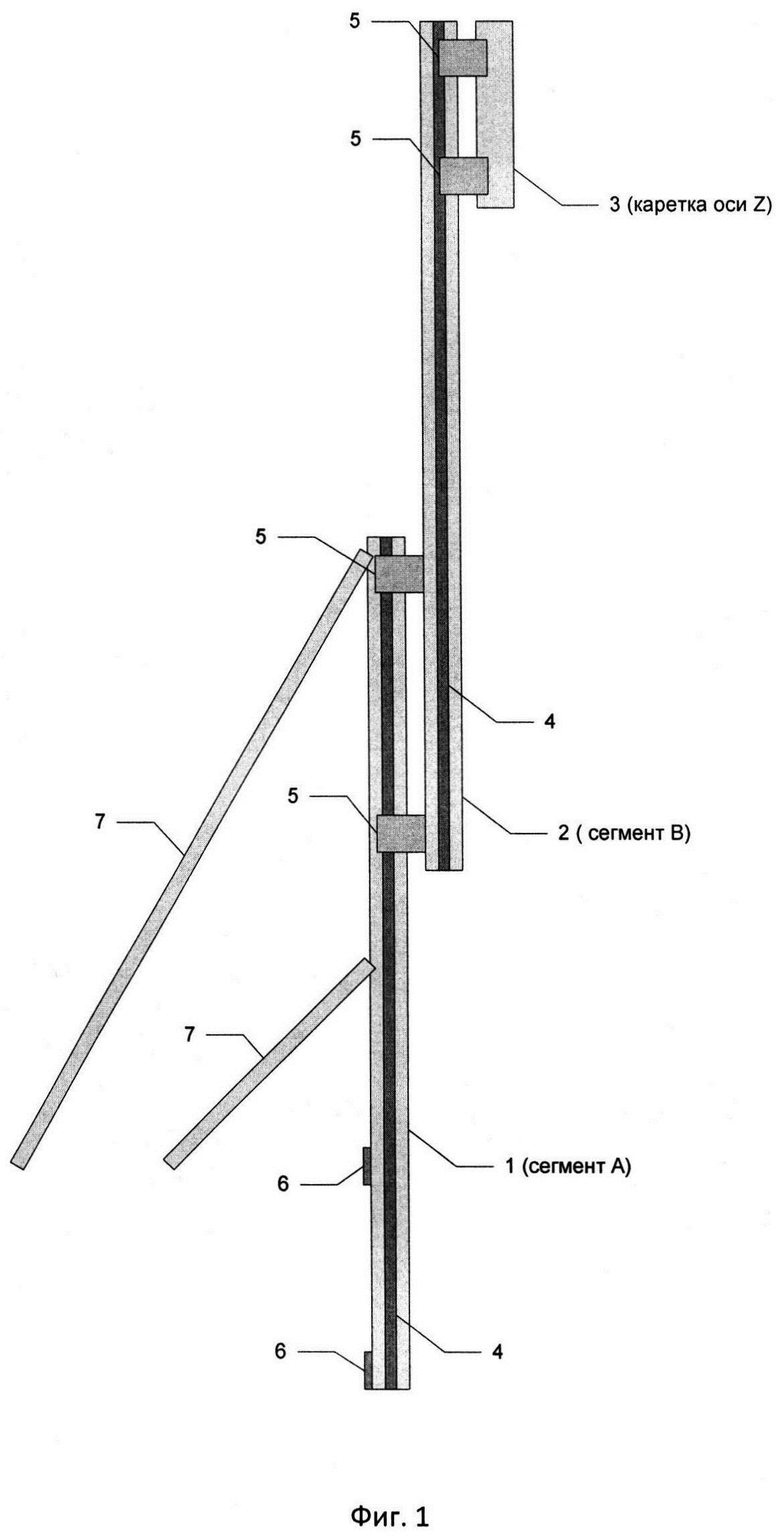
1. Конструкция складывающейся мачты беспилотного автономного робота, характеризующаяся тем, что содержит неподвижный сегмент, присоединенный к станине робота, подвижный сегмент, установленный с возможностью перемещения по профильным рельсам, закрепленным на неподвижном сегменте, при этом на подвижном сегменте установлена каретка на профильных рельсах, а неподвижный и подвижный сегменты снабжены приводами для перемещения подвижного сегмента и каретки соответственно.
2. Конструкция по п. 1, характеризующаяся тем, что привод подвижного сегмента и каретки снабжены датчиками линейного положения.
3. Конструкция по п. 1, характеризующаяся тем, что неподвижный сегмент мачты присоединен к станине робота через привалочные плоскости в нижней части и для придания жесткости дополнительно укреплен раскосами в средней и верхней частях.
| ЖИВОТНОВОДЧЕСКИЙ КОМПЛЕКС ДЛЯ КРУПНОГО РОГАТОГО СКОТА | 2014 |
|
RU2572210C1 |
| Токарный резец | 1924 |
|
SU2016A1 |
| Животноводческая ферма круглой формы | 1990 |
|
SU1727732A1 |

