Изобретение относится к устройству для дуговой сварки и может быть использовано в промышленных роботах, применяемыхвмашиностроительной, автомобилестроительной и других отраслях промышленности.
Целью изобретения является расширение функциональных возможностей.
На фиг.1 представлен промышленный робот, общий вид; на фиг.2 и 3 - варианты встраивания робота в различные транспортные системы ГПС; на фиг.4 - кинематическая схема каретки линейного перемещения робота, вид сбоку; на фиг.5 - кинематическая схема каретки, вид сверху; на фиг.6 - узел натяга роликовой опоры качения каретки, сечение.
В состав промышленного робота (фиг.1) входят балка 1 с призматическими направляющими 2, вдоль которых перемещается каретка 3 с манипулятором сварочного инструмента.
Манипулятор включает модуль 4 продольного перемещения по оси X, корпус которого жестко связан с кареткой. Под звеномX расположен модуль 5 поперечного перемещения по оси Y, с которым связан модуль 6 вертикального перемещения по оси Z. несущее поворотное основание 7 с сварочным инструментом 8.
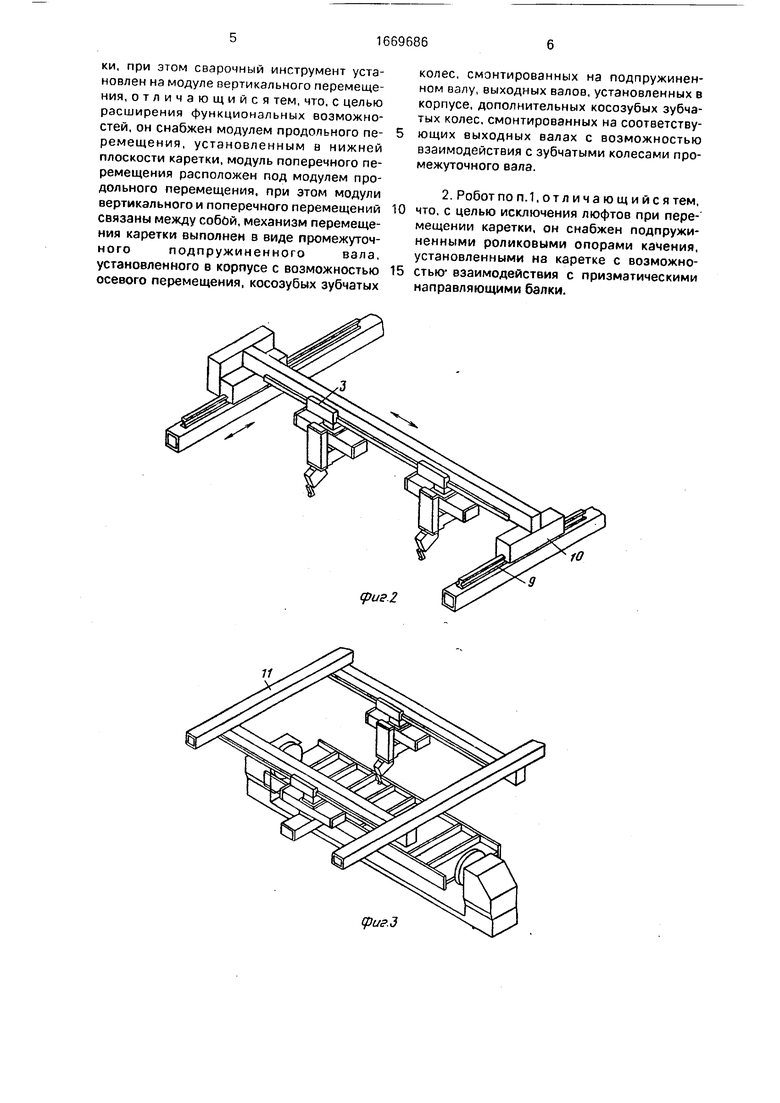
На одной балке 1 (фиг.2) могут размещаться две каретки 3 с манипуляторами инструмента, причем с целью расширения рабочей зоны балка может перемещаться вдоль направляющих 9 при помощи транс портных тележек 10, установленных в верхней части цеховых пролетов.
Возможен вариант (фиг.З) крепления двух балок 1 с манипуляторами в виде жесткой мостовой конструкции, в которой имеются две продольные связующие балки 11, закрепленные также в верхней части цехового пролета.
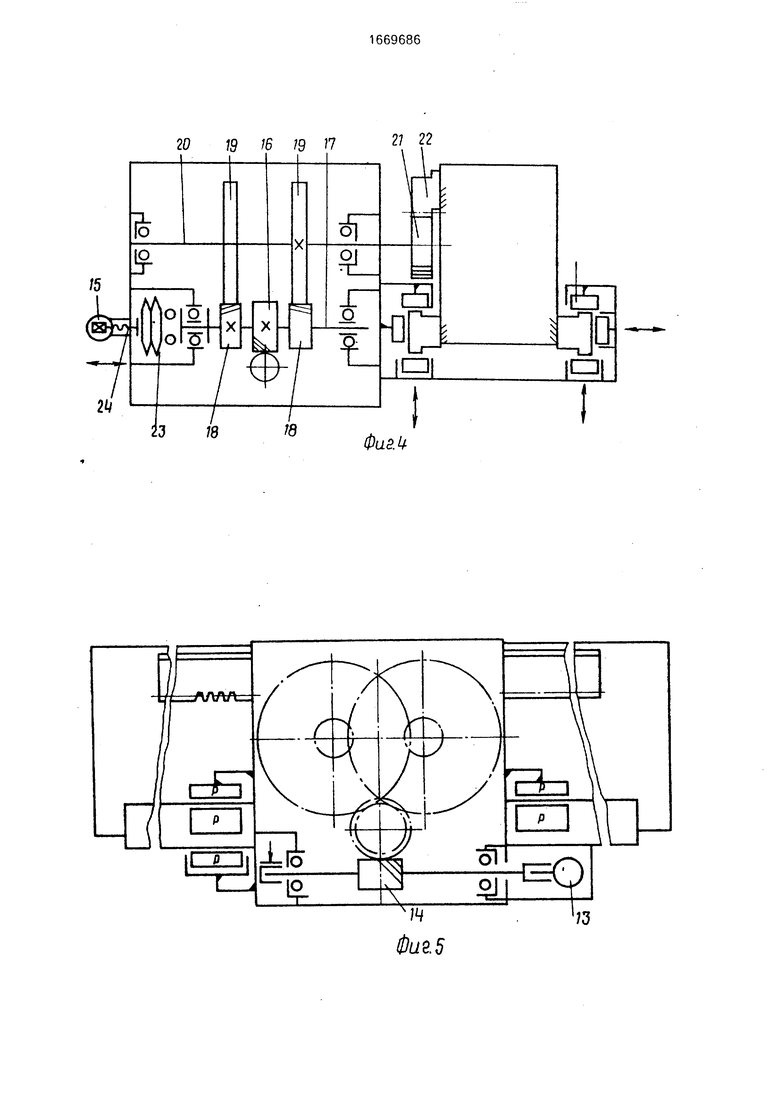
Каретка 3 линейного перемещения (фиг.4, 5) устроена следующим образом, Внутри каретки размещены двенадцать роликовых опор 12 качения, взаимодействующих с двумя призматическими направляющими банки. Редуктор каретки состоит из приводного электродвигателя 13. передающего вращение быстроходной вал-шестерне 14, имеющей угол наклона зубьев 45 . В случае отключения электродвигателя вал-шестерня прекращает вращение за счет действия тормоза 15 с электромагнитным управлением. Вал-шестерня входит в зацепление с зубчатым колесом 16, закрепленным на промежуточном валу 17. на котором одновременно закреплены два одинаковых косозубых зубчатых
колеса 18, имеющих противоположное направление зубьев. Колеся 18 входят в зацепление с зубчатыми колесами 19, расположенными на двух выходных валах
20 редуктора. На концах валов 20 консольно закреплены два реечных колеса 21, одновременно входящих в зацепление с неподвижной зубчатой рейкой 22, закрепленной на балке. Промежуточный вал 17 имеет воз0 можность осевого перемещения в подшипниковых опорах за счет усилия пакета тарельчатых пружин 23. поджатых при помощи винта 24.
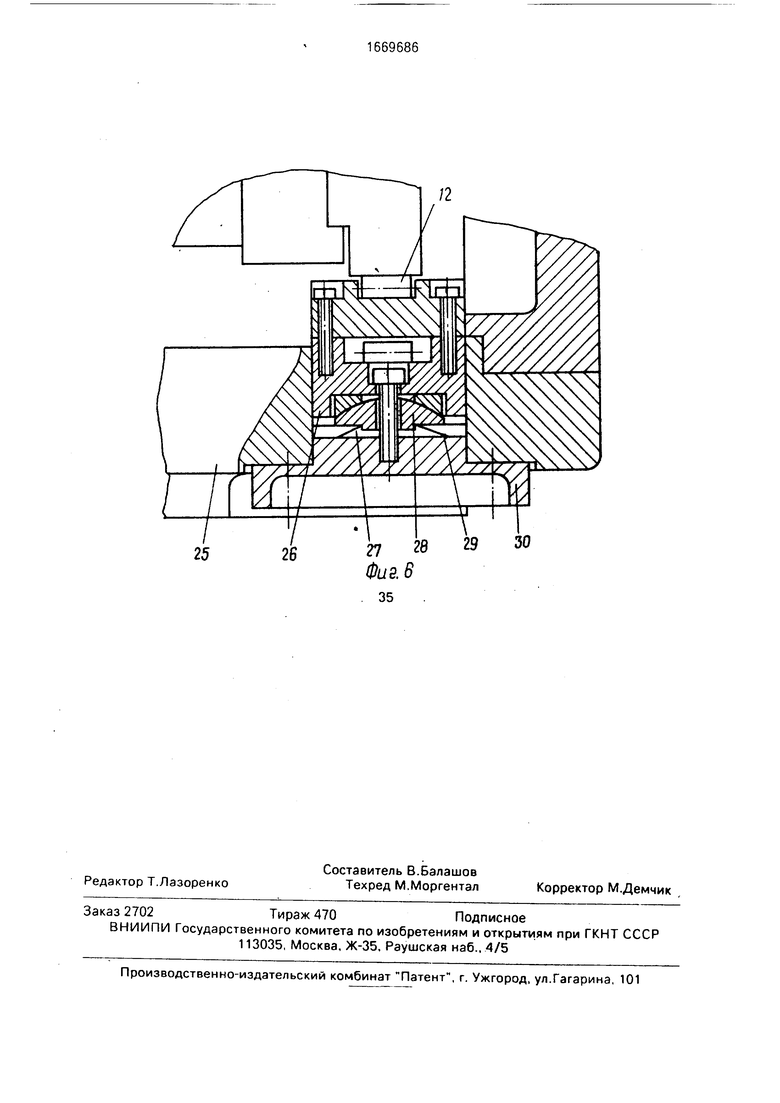
Узел натяга роликовой опоры качения
5 (фиг.6) устроен следующим образом. В корпусе 25 каретки имеются окна, в которых размещены ползуны 26 с закрепленными на них роликовыми опорами 12 качения, постоянно прижатыми к направляющим за счет
0 усилия тарельчатых пружин 27. Пружины передают усилие через пакет самоустанавливающихся сферических шайб 28 и 29. Поджатие пружин осуществляется при помощи крышек 30.
5Промышленный робот работает следующим образом.
Вдоль балки 1 передвигается одна (фиг.1) или две (фиг.2,3) каретки 3 с манипуляторами инструмента. В каждой каретке
0 размещено шесть неподвижных роликовых опор 12 качения и шесть подвижных. Схема размещения опор показана на фиг.4. Каждая подвижная опора постоянно поджата с регулируемым усилием к направляющей
5 при помощи тарельчатых пружин 27 с целью исключения люфтов в процессе перемещения. Вращением винта 24 редуктора (фиг.4, 5) обеспечивается осевое перемещение промежуточного вала 17. При этом косозу0 бые колеса 18 разворачиваются в противоположные стороны, вызывая поворот выходных валов 20 до полного выбора боковых зазоров во всех зубчатых зацеплениях замкнутой кинематической цепи редуктора.
5 В зависимости от компоновки РТК или ГПС балка 1 (фиг.2,3) может перемещаться вдоль цехового пролета по рельсам или входить в состав подвесной мостовой конструкции. Формула изобретения
01. Многоцелевой промышленный робот
для дуговой сварки, содержащий балку с призматическими направляющими элементами, каретку, охватывающую балку и установленную с возможностью возвратно-поступательного пе5 ремещения по последней, корпус, смонтированный на боковой стороне каретки, механизм перемещения каретки, установленный в корпусе, сварочный инструмент, модули поперечного и вертикального перемещения сварочного инструмента относительно балки, при этом сварочный инструмент установлен на модуле вертикального перемещения, отличающийся тем, что, с целью расширения функциональных возможностей, он снабжен модулем продольного перемещения, установленным а нижней плоскости каретки, модуль поперечного перемещения расположен под модулем продольного перемещения, при этом модули вертикального и поперечного перемещений связаны между собой, механизм перемещения каретки выполнен в виде промежуточногоподпружиненноговала, установленного в корпусе с возможностью осевого перемещения, косоэубых зубчатых
0
5
колес, смонтированных на подпружиненном валу, выходных валов, установленных в корпусе, дополнительных косозубых зубчатых колес, смонтированных на соответствующих выходных валах с возможностью взаимодействия с зубчатыми колесами промежуточного вала.
2. Робот по п. 1.отличающийся тем, что, с целью исключения люфтов при перемещении каретки, он снабжен подпружиненными роликовыми опорами качения, установленными на каретке с возможностью взаимодействия с призматическими направляющими балки.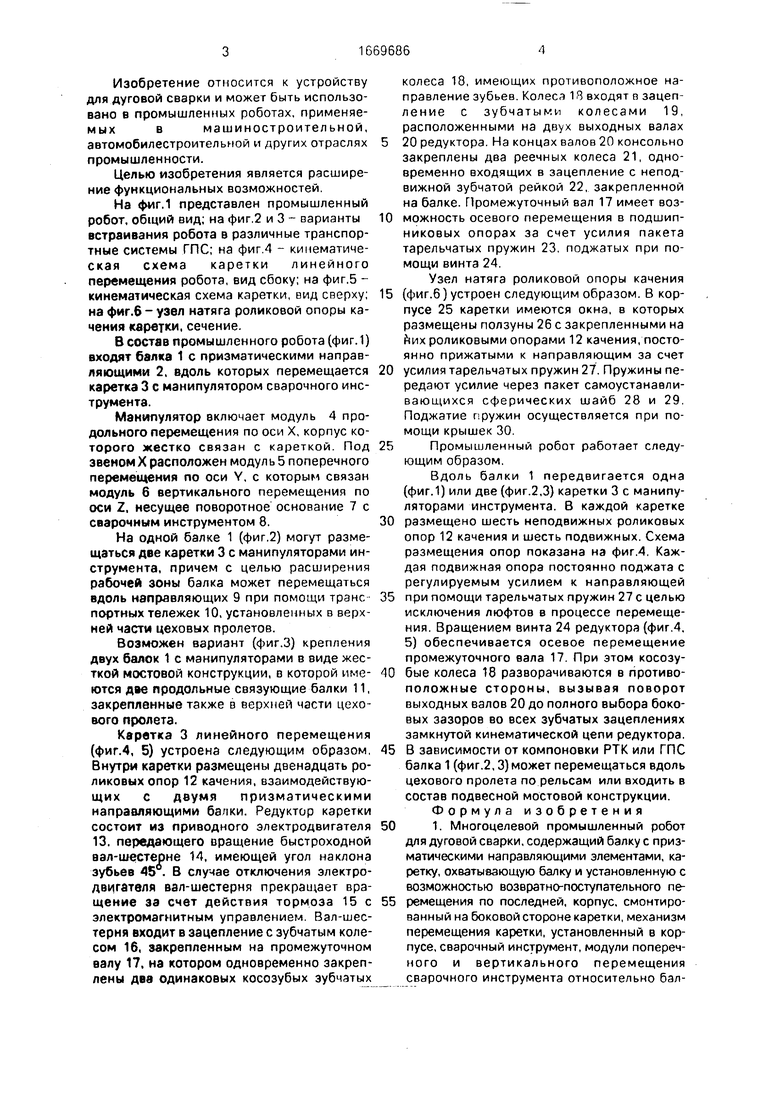
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОРТАЛЬНЫЙ РОБОТ | 1988 |
|
RU2022770C1 |
| Гибкая производственная система | 1989 |
|
SU1673397A1 |
| ПОРТАЛЬНЫЙ РОБОТ БЕЛЯЕВА Н.П. | 1992 |
|
RU2080243C1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Манипулятор внутрикамерный | 2021 |
|
RU2785920C1 |
| КОМПЛЕКС МОБИЛЬНОГО ОГРАЖДЕНИЯ ДЛЯ ПРОВЕДЕНИЯ ПУТЕВЫХ РАБОТ | 2021 |
|
RU2774304C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕМЕЩЕНИЯ И ОРИЕНТИРОВАННОЙ УСТАНОВКИ ЕМКОСТЕЙ И ЕМКОСТЬ ДЛЯ ПЕРЕМЕЩЕНИЯ И ХРАНЕНИЯ | 2008 |
|
RU2379175C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ МЕТАЛЛОДЕРЕВЯННЫХ БАЛОК ИЗ МЕТАЛЛИЧЕСКОГО СЕРДЕЧНИКА И ДВУХ ДЕРЕВЯННЫХ ОБКЛАДОК И ПРОИЗВОДСТВЕННЫЙ МОДУЛЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2354790C2 |
| Устройство для сборки герметичного реле | 1984 |
|
SU1229854A1 |
| Манипуляционная система | 1990 |
|
SU1784451A1 |
Изобретение относится к устройствам для дуговой сварки и может быть использовано в промышленных роботах, применяемых в машиностроительной, автомобилестроительной и других отраслях промышленности. Цель изобретения - расширение функциональных возможностей. Вдоль балки 1 передвигается одна или две каретки 3 с манипуляторами инструмента. В каждой каретке размещены шесть неподвижных роликовых опор качения и шесть подвижных. Каждая подвижная опора постоянно поджата с регулируемым усилием к направляющей при помощи тарельчатых пружин для исключения люфтов в процессе перемещения. На нижней плоскости каретки установлен модуль 4 продольного перемещения сварочного инструмента 8, а на модуле 4 смонтирован модуль 5 поперечного перемещения, на котором установлен модуль 6 вертикального перемещения. 1 з.п.ф-лы, 6 ил.
11
10
фиг.2
фиг.З
у
til
ГО
i
и и
Ъ гпф
hi
Ll 61 91 61 01
9896991
26
27
Фив. 6
35
28 29 30
| Сварочные работы/Под ред | |||
| Гердена Г.М | |||
| М.: Машиностроение, 1988, с.174, рис | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
