Изобретение относится к устройству для перемещения подложек согласно технологии производства микропроцессорной техники без образования частиц в миниатюрных рабочих средах в условиях чистого помещения, в частности, для перемещения кремниевых пластин в полупроводниковой промышленности.
С момента начала применения технологии SMIF (Стандартный механический интерфейс) для перемещения 200 мм плат в начале девяностых годов кремниевые пластины при изготовлении полупроводников перемещаются не вручную, а автоматически при помощи роботов. Таким образом, каждый станок оборудован так называемым фабричным переходным устройством, а именно устройством EFEM (модулем внешнего интерфейса оборудования), предназначенным для вскрытия транспортировочных кассет, в которых находятся пластины - кассет SMIF для 200 мм пластин и кассет FOUPS (отрывающихся спереди унифицированных кассет) - около станка, извлечения пластины и установки ее внутри операционного станка.
Таким образом, данные устройства EFEM соответствуют тем же самым высоким стандартам степени чистоты, что и каждый операционный станок. В случае технологии 200 мм плат конструкция устройства EFEM могла свободно выбираться производителями станков, и только конструкция порта SMIF, т.е. открывающего механизма (загрузочного устройства SMIF) для кассет, регламентировалась организацией SEMI (сайт semi. org) и была принята в качестве международного стандарта. Роботизации и применению технологии чистого помещения в зоне передачи от загрузочного устройства SMIF к входу станка уделялось мало внимания, и предлагаемые решения не отвечали требованиям стандарта чистоты соответствующей полупроводниковой технологии.
Процедуры измерения и оценки пригодности с точки зрения чистоты подобных малых чистых помещений для EFEM, так называемых чистых миниатюрных рабочих сред были кодифицированы организацией SEMI в стандарте "SEMI E44" в 1995 и 1996 гг для того, чтобы помочь производителям станков в определении чистоты подобных систем.
На основании опыта, полученного при использовании технологии SMIF, организация SEMATECH (сайт permatech.org) с появлением в марте 1999 г плат размера 300 мм опубликовала рекомендации для проектирования устройств по технологии EFEM (#99033693A-ENG, "Integrated Mini Environment Design Best Practices" ("Оптимальное конструирование встроенных миниатюрных рабочих сред")).
Конструкция роботов-манипуляторов, работающих внутри миниатюрных рабочих сред, не регулировалась данным документом. Обычно роботы также называются манипуляторами. Они представляют собой устройства для перемещения кремниевых плат с четырьмя степенями свободы (возможностью линейного перемещения вдоль осей х, у, z и углового перемещения вокруг оси z в направлении Ф), которые применяются в подобных миниатюрных рабочих средах. Новые роботы имеют множество вращательных осей из соображений рационального использования пространства.
Роботы обычно снабжены подшипниками или подшипниками скольжения. Большие линейные перемещения в районе основания миниатюрных рабочих среды (вдоль оси, обычно обозначаемой у) происходят в основном на обычных роликах или сферических кольцевых подшипниках и осуществляются за счет приводных ремней, поворотных реек или, в лучшем случае, при помощи линейных двигателей.
Подача питания к таким системам, а также кабели для передачи сигналов и вакуумные шланги при необходимости поддерживаются кабелями над кабельными цепями соответствующих питающих кабельных цепей.
Все эти механические элементы являются источниками возникновения частиц из-за наличия неустранимого трения. В реальных системах предпринимались попытки изоляции возникающих частиц от критической поверхности платы за счет вертикального перемещения воздуха, его выпуска и герметизации. Вследствие турбулентности и "хаотического" поведения перемещаемого воздушного потока в районе перемещаемых систем эффективность подобных способов является в основном ограниченной.
Т.е. некоторая часть возникающих частиц всегда по статистике достигает поверхности платы.
Учитывая высокую степень миниатюризации конструкций и повышение сложности функций кремниевой платы и, особенно, появление плат, имеющих следующий больший размер 450 мм, требования к их чистоте, безусловно, повысятся. Организация SEMATECH в документе ITRS (Мировые тенденции развития полупроводниковых технологий) предлагает повышение качества воздуха до уровня 1-го класса чистоты в соответствии с Международным стандартом чистоты (стандартом ISO #14644).
В документе JP 04264749 описан транспортировочный робот, в котором транспортировка плат осуществляется в каретке через туннель под действием магнитной силы, в котором каретка зависает в туннеле или зависает под манипулятором, удерживаемая магнитной силой. Перемещение платы по нескольким транспортировочным маршрутам производится при помощи транспортировочного робота. Аналогичная транспортировочная система для плат описана в документе ЕР 0626724 В1.
В документах US 6045319 В и ЕР 0246098 также описана магнитная транспортировочная система для перемещения зависающих кареток, которые могут перевозить несколько изделий. Но в этих конструкциях существуют несколько дополнительных направляющих элементов, которые могут вызвать образование частиц.
Для перемещения плат в таких транспортировочных системах применяются манипуляторы для перемещения плат, которые осуществляют транспортировку платы в направлениях х, у, z и в направлении Ф.
В документе JP 04267355 А описан робот для перемещения платы, который может перемещать платы в вакуумной камере при помощи манипулятора, приводимого от магнитов, расположенных снаружи вакуумной камеры.
В документе US 5288199 описан неподвижно установленный манипулятор плат, который снабжен магнитным приводом для поступательного перемещения. Для этого рабочая рука на одном конце снабжена вилкой, которая перемещается в осевом направлении под действием электромагнита. Поворотная ось манипулятора плат установлена на стандартном подшипнике.
Задача настоящего изобретения заключается в создании устройства для перемещения подложек, применяемых в микропроцессорной технике, без образования частиц, которое работает без трения.
Указанная задача решена в устройстве по изобретению, которое имеет несколько степеней свободы, в котором по меньшей мере, перемещения в направлениях х, у, z и Ф осуществляются и/или направляются при помощи магнитной силы и бесконтактным способом, причем перемещение и поддержание при перемещении вдоль каждой оси осуществляется бесконтактным электромагнитным способом, а передача энергии для направления и перемещения осуществляется бесконтактным способом, при этом предусмотрено наличие, по меньшей мере, одного активного элемента и, по меньшей мере, одного пассивного элемента.
Магнитные опоры выполнены в виде электромагнитных опор, электродинамических опор или опор на постоянных магнитах, к которым энергия передается путем индукции или при помощи трансформатора.
Каждая ось снабжена датчиками положения, которые передают данные бесконтактным способом, причем данные от датчиков передаются по беспроводной схеме.
Приводные элементы обычно неподвижны, а транспортировочный узел перемещается приводными элементами бесконтактным способом, причем приводные элементы перемещаются вместе с транспортировочным узлом.
Подвижный активный узел перемещается в направляющих, находясь в подвешенном состоянии над магнитной опорой на неподвижном пассивном элементе, причем приводной двигатель, расположенный на активном элементе, соединен с источником питания через соединительный узел, а активный элемент представляет собой подъемно-вращательный узел с манипулятором. Подъемно-вращательный узел снабжен внешней трубкой, которая вертикально закреплена на активном элементе внутри одного уровня или большего числа уровней, которые представляют собой, по меньшей мере, три магнитные опоры, равномерно расположенные на внутренней поверхности для бесконтактного направления внутренней трубки в вертикальном направлении при ее перемещении между двумя крайними положениями.
Во внутренней трубке расположен центральный подъемный двигатель, который функционально соединен со стержнем, вертикально закрепленным во внутренней трубке.
Во внутренней трубке расположен электромагнитный вращательный привод для управляемого поворота внутренней трубки относительно неподвижного вертикального стержня.
На манипуляторе расположена электромагнитная подвижная вилка для установки кремниевой платы.
Изобретение обеспечивает создание механических направляющих с нулевым трением для нескольких элементов, а также подачу питания и передачу сигналов к нескольким элементам.
Изобретение описано на нижеприведенном примере.
На фиг.1 показано устройство по изобретению для перемещения подложек без образования частиц с неподвижным пассивным элементом и перемещаемым внутри пассивного элемента активным элементом, в котором перемещаемое изделие с кремниевыми платами находится на активном элементе, вид в сечении, поперечном к направлению перемещения;
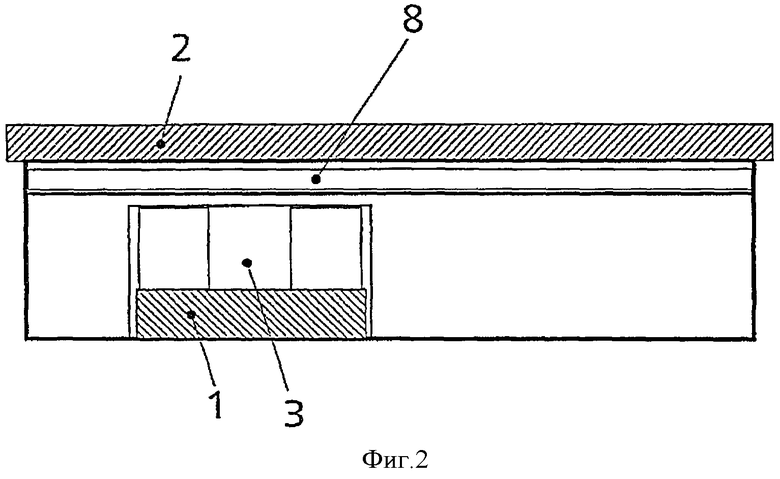
на фиг.2 - устройство в соответствии с фиг.1, у которого активный элемент перемещается через пассивный элемент, вид сбоку;
на фиг.3 - устройство по изобретению для перемещения подложек без образования частиц с неподвижным активным элементом и перемещаемым пассивным элементом, в котором перемещаемое изделие с кремниевыми платами находится в пассивном элементе, вид в сечении, поперечном к направлению перемещения;
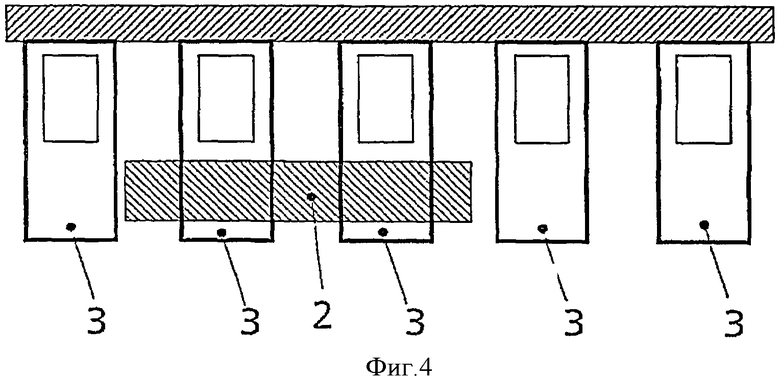
на фиг.4 - устройство согласно фиг.3, у которого пассивный элемент перемещается через активные элементы, размещенные с зазором;
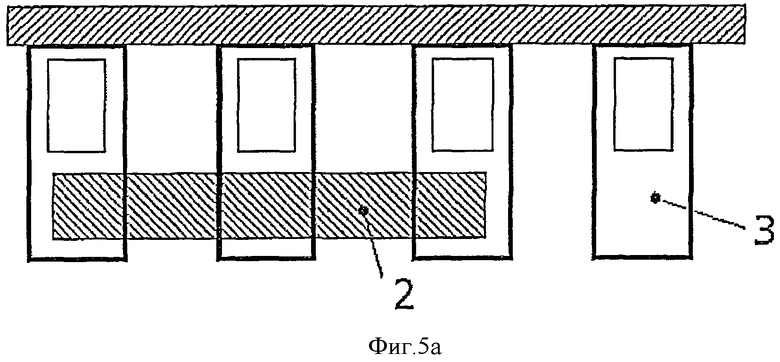
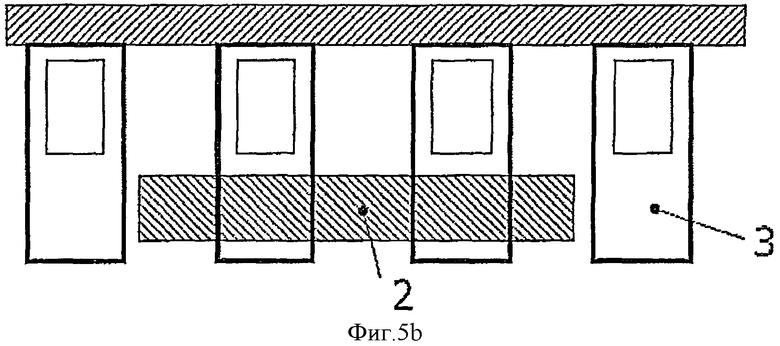
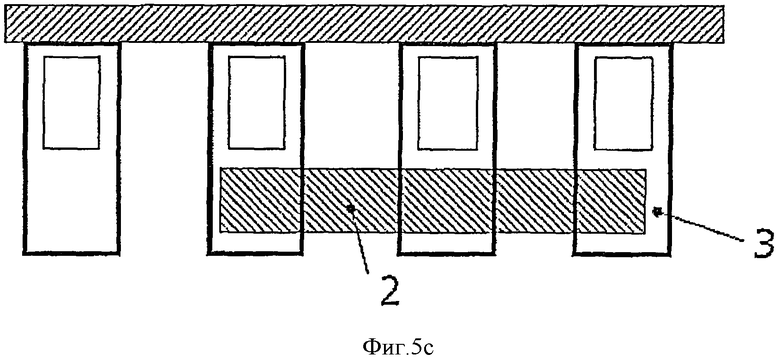
на фиг.5а-5с - несколько положений пассивного элемента при перемещении через активные элементы;
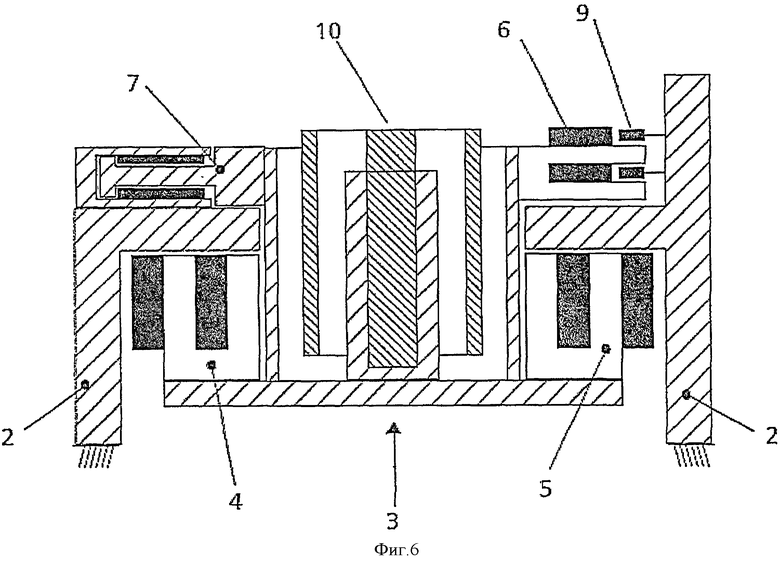
на фиг.6 - сечение электромагнитной линейной опоры, также предназначенной для перемещения пассивного элемента внутри активного элемента по изобретению;
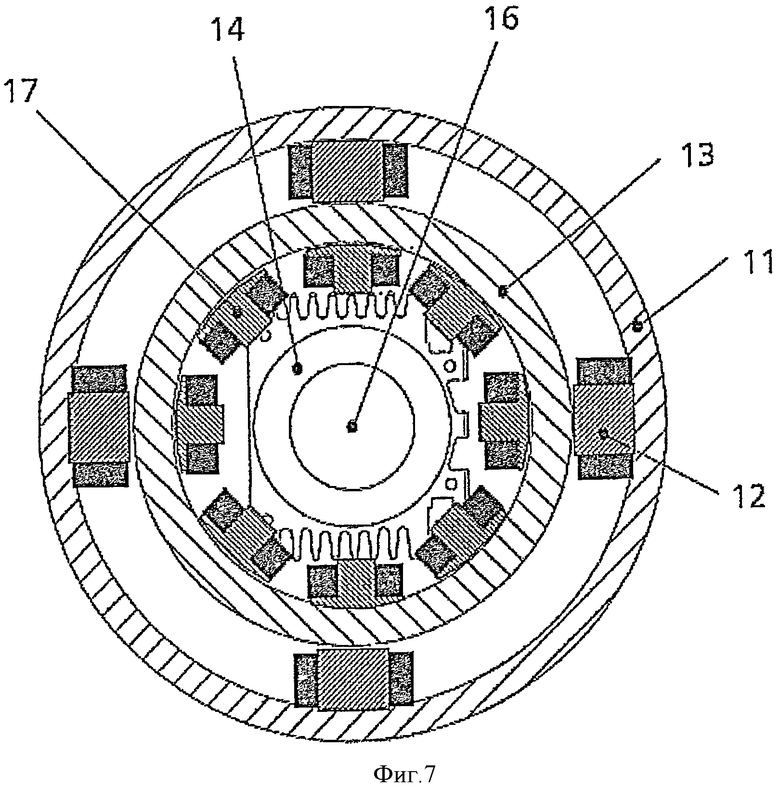
на фиг.7 - электромагнитная подъемно-вращательная опора по изобретению, вид в сечении;
на фиг.8 - электромагнитная подъемно-вращательная направляющая согласно фиг.7 по изобретению, вид сбоку в разрезе;
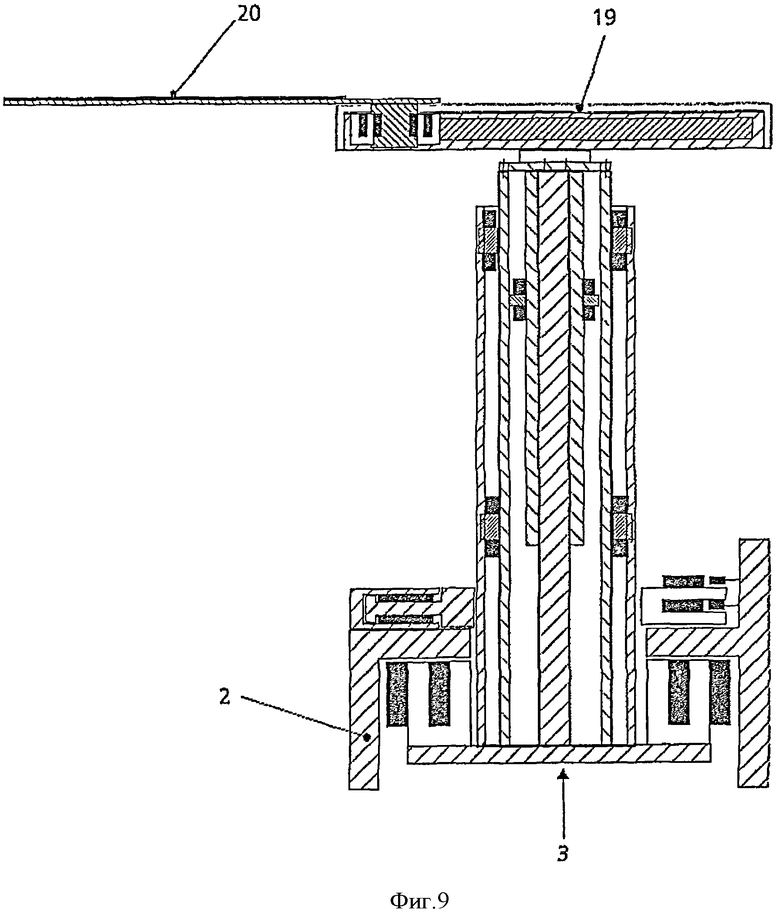
на фиг.9 - комбинация направляющей поступательного перемещения и направляющей углового перемещения с закрепленным манипулятором кремниевых плат в нижнем положении, пи этом манипулятор находится в выдвинутом положении, вид в сечении;
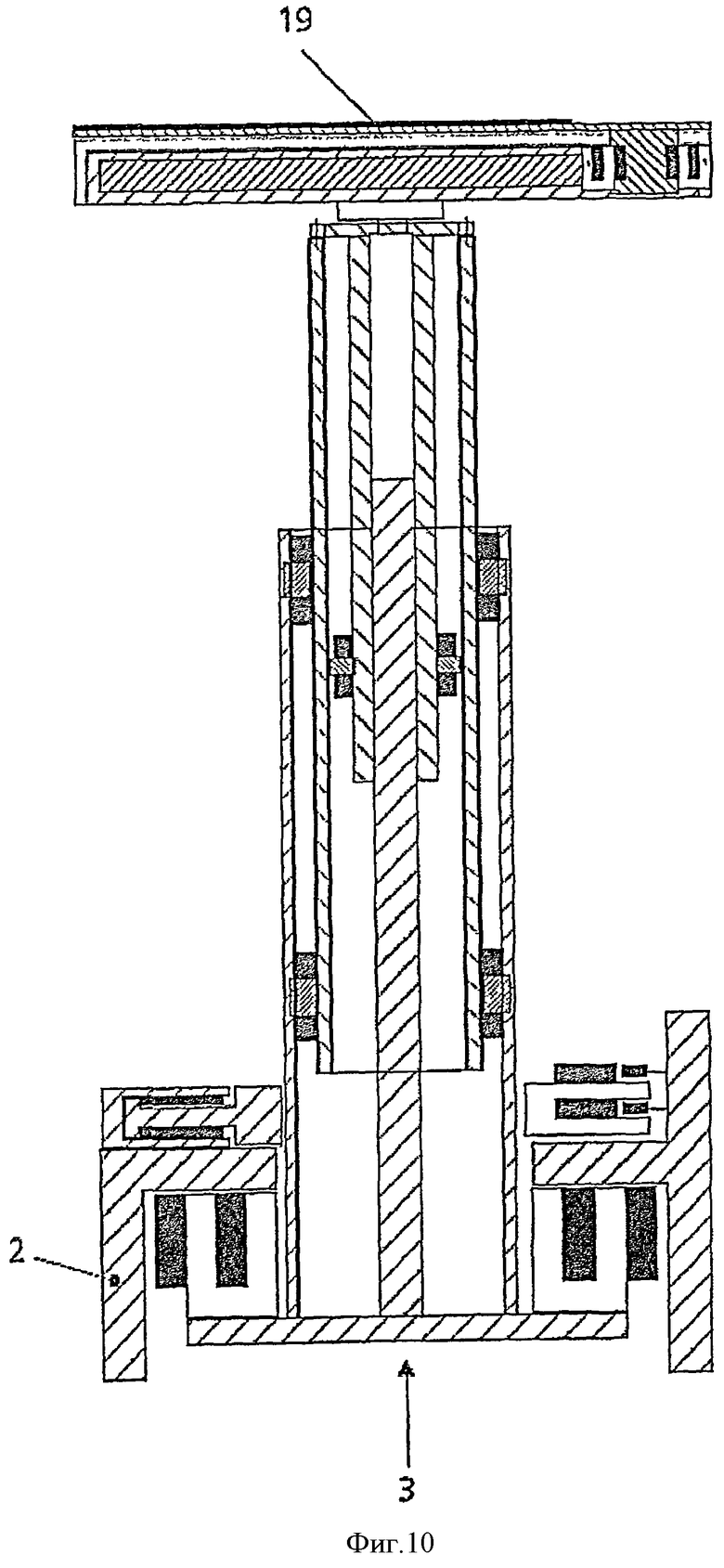
на фиг.10 - устройство согласно фиг.9 в верхнем положении, при этом манипулятор убран;
на фиг.11 - манипулятор согласно фиг.10 с магнитным подшипником и электромагнитным приводом;
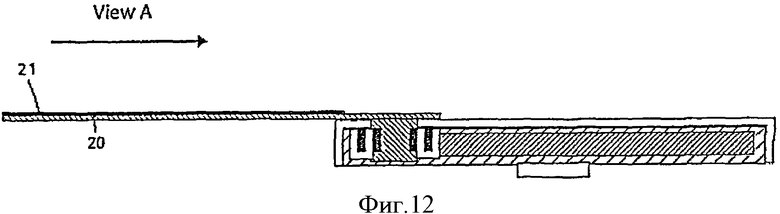
на фиг.12 - манипулятор согласно фиг.11 в убранном положении;
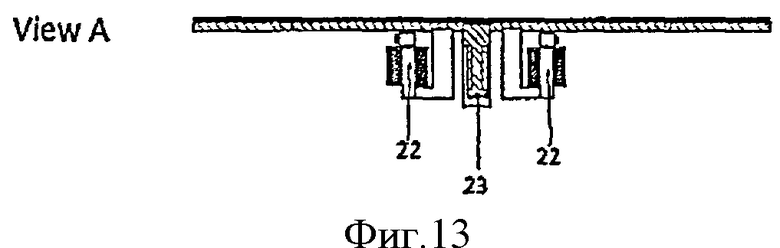
на фиг.13 - манипулятор, вид по стрелке А согласно фиг.12 в разрезе;
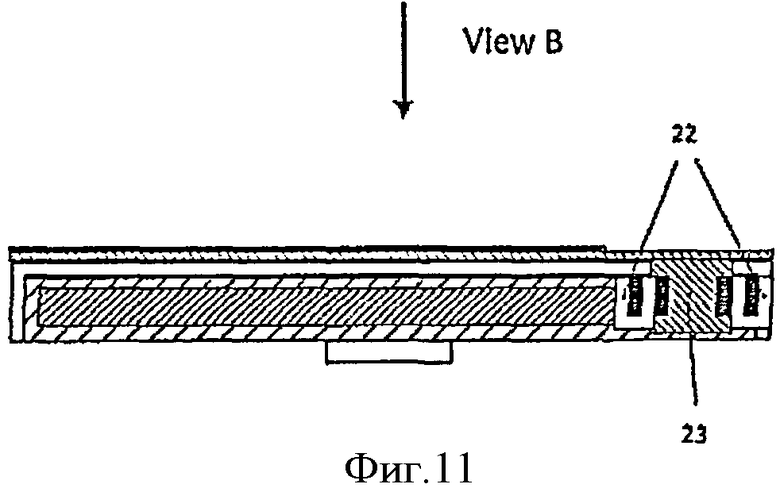
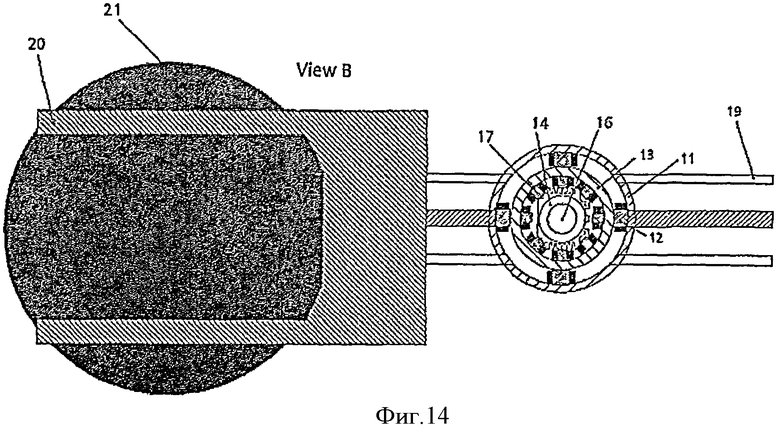
на фиг.13 - манипулятор, вид по стрелке В согласно фиг.12.
На фиг.1 показано устройство для перемещения подложек (не показанных на фигуре) без образования частиц или других изделий внутри контейнера 1, при этом устройство показано в сечении, поперечном к направлению перемещения. Устройство состоит из неподвижного пассивного элемента 2, активного элемента 3, выполненного с возможностью перемещения под действием магнитной силы вдоль заданной траектории. Поскольку активный элемент приводится в движение, его необходимо обеспечить энергией для обеспечения магнитной опоры 4, 5, которая удерживает активный элемент под пассивным элементом в состоянии левитации. Подача энергии осуществляется при помощи электромагнитного соединительного устройства 6, которое также обеспечивает питание приводного двигателя 7, представляющего собой линейный индукционный двигатель. Пассивный элемент 2 снабжен только постоянными магнитами 8.
На фиг.2 показан активный элемент 3 в процессе перемещения вдоль пассивного элемента 2.
На фиг.3 показан неподвижный активный элемент 3 и перемещаемый пассивный элемент 2. Подлежащее перемещению изделие с кремниевыми платами находится в транспортировочном контейнере 1, который одновременно является пассивным элементом 2. Для обеспечения перемещения пассивного элемента 2 в данном варианте осуществления изобретения имеется несколько активных элементов 3, расположенных с промежуточными интервалами относительно друг друга вдоль заданной траектории. На фиг.4 показан пассивный элемент 2 в процессе перемещения через несколько активных элементов 3.
Для обеспечения безопасного направления пассивного элемента 2 необходимо обеспечить его постоянное удержание в подвешенном состоянии, по меньшей мере, двумя активными элементами 3 в процессе перемещения (фиг.5а-5с).
На фиг.6 показана электромагнитная направляющая опора, подробный вид в разрезе, на котором активный элемент 3 установлен на пассивном элементе 2 по изобретению.
Для передачи энергии к активному элементу на активном элементе 3 имеется электромагнитное соединительное устройство 6, расположенное напротив катушки 9, закрепленной на пассивном элементе, которая используется в качестве передающей антенны. Кроме того, установлены две закрепленные в поперечном направлении магнитные опоры 4, 5, которые удерживают активный элемент 3 на пассивном элементе 2 в равновесии и в подвешенном состоянии.
Привод активного элемента 3 осуществляется установленным на нем приводным двигателем 7, который представляет собой линейный двигатель.
Кроме того, активный элемент 3 снабжен подъемно-вращательным узлом 10.
На фиг.7, 8 показаны сечения данного подъемно-вращательного узла. Подъемно-вращательный узел содержит, например, внешнюю трубку 11, закрепленную вертикально на активном элементе 3 (см. фиг.3) с четырьмя магнитными опорами 12, которые расположены на внутренней периферийной поверхности на одном уровне или на нескольких уровнях с взаимным угловым смещением 90°, для бесконтактного создания вертикальной направляющей внутренней трубки 13, которая выполнена с возможностью перемещения между двумя крайними положениями при поддержке данных магнитов.
Для перемещения внутренней трубки 13 в вертикальном направлении внутри нее установлен центральный подъемный двигатель 14 с неподвижной вертикальной обмоткой 15, а также намагничиваемый стержень 16, расположенный вертикально внутри трубки 13. Верхний свободный конец 18 внутренней трубки 13 используется для крепления дополнительных элементов, таких как манипулятор 19 для удержания и перемещения плат.
Кроме того, внутри трубки 13 установлен вращательный привод 17 (фиг.7).
На фиг.9 показана сборка из поступательной и вращательной опор согласно фиг.7 с прикрепленным манипулятором 19, который снабжен электромагнитной выдвижной вилкой 20 для переноса кремниевой платы 21 (фиг.14). На фиг.9 показан манипулятор 19 с выдвинутой вилкой 20, находящийся в нижнем крайнем положении, а на фиг.10 - в верхнем крайнем положении с убранной вилкой 20. Манипулятор 19 также снабжен бесконтактной опорой и приводом.
Подробное изображение манипулятора 19 приведено на фиг.11-14, при этом на фиг.11 показан манипулятор 19 согласно фиг.10 с магнитной опорой 22 и электромагнитным приводом 23 с вилкой 20 в убранном состоянии (фиг.11) и с выдвинутой вилкой 20 (фиг.12).
На фиг.13 показан вид манипулятора по стрелке А согласно фиг.12 в разрезе с магнитной опорой 22 и электромагнитным приводом 23.
На фиг.14 показан вид манипулятора по стрелке В согласно фиг.12 с убранной вилкой 20, а также вращательным приводом согласно фиг.7.
Список ссылочных позиций
1 - транспортировочный контейнер;
2 - пассивный элемент;
3 - активный элемент;
4 - магнитная опора;
5 - магнитная опора;
6 - электромагнитное соединительное устройство;
7 - приводной двигатель;
8 - постоянный магнит;
9 - катушка;
10 - подъемный узел;
11 - внешняя трубка;
12 - магнитная опора;
13 - внутренняя трубка;
14 - подъемный двигатель;
15 - катушка;
16 - намагничиваемый стержень;
17 - вращательный привод;
18 - свободный конец;
19 - манипулятор;
20 - вилка;
21 - кремниевая плата;
22 - магнитная опора;
23 - электромагнитный привод.


Изобретение относится к устройству для перемещения подложек согласно технологии производства микропроцессорной техники без образования частиц в миниатюрных рабочих средах в условиях чистого помещения. Устройство для перемещения подложек выполнено с возможностью перемещения подложки вдоль нескольких осей с помощью манипулятора, снабженного на своем свободном конце электромагнитной подвижной вилкой, причем манипулятор расположен на подъемно-вращательном узле, электромагнитная направляющая опора снабжена активным подвижным элементом, который установлен на неподвижном пассивном элементе с помощью закрепленных в поперечном направлении магнитных опор, которые удерживают активный подвижный элемент на пассивном элементе в равновесии и в подвешенном состоянии, при этом активный элемент снабжен подъемно-вращательным узлом, который содержит внешнюю трубку, вертикально закрепленную на активном элементе, внутри внешней трубки расположены магнитные опоры, установленные с равными интервалами на внутренней поверхности внешней трубки для бесконтактного направления внутренней трубки в вертикальном направлении между двумя крайними положениями. Изобретение позволяет осуществлять перемещение подложек без трения и, следовательно, без образования частиц. 20 з.п. ф-лы, 14 ил.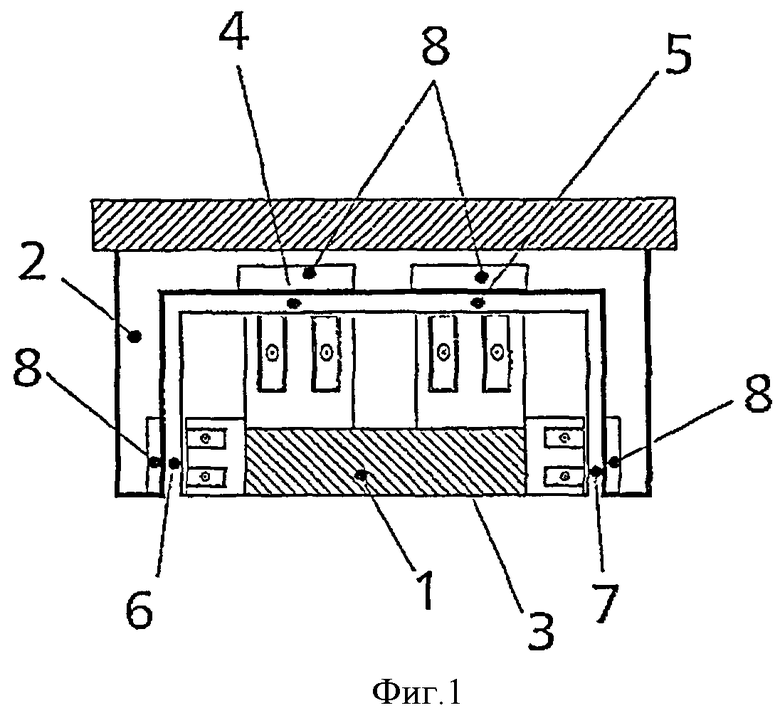
1. Устройство для перемещения подложек для микропроцессорной техники без образования частиц внутри миниатюрных рабочих сред в условиях чистого помещения, при этом устройство выполнено с возможностью перемещения подложки вдоль нескольких осей с помощью манипулятора, снабженного на своем свободном конце электромагнитной подвижной вилкой, причем манипулятор расположен на подъемно-вращательном узле, отличающееся тем, что электромагнитная направляющая опора снабжена активным подвижным элементом (3), который установлен на неподвижном пассивном элементе (2) с помощью закрепленных в поперечном направлении магнитных опор (4, 5), которые удерживают активный подвижный элемент (3) на пассивном элементе (2) в равновесии и в подвешенном состоянии, при этом активный элемент (3) снабжен подъемно-вращательным узлом, который содержит внешнюю трубку (11), вертикально закрепленную на активном элементе (3), при этом внутри внешней трубки (11) в один или несколько рядов расположены магнитные опоры (12), установленные с равными интервалами на внутренней поверхности внешней трубки (11) для бесконтактного направления внутренней трубки (13) в вертикальном направлении между двумя крайними положениями.
2. Устройство по п.1, отличающееся тем, что подвижный активный узел (3) имеет возможность перемещения в направляющих, находясь в подвешенном состоянии за счет магнитной опоры (4, 5) на неподвижном пассивном элементе (2), причем приводной двигатель (7), расположенный на активном элементе (3), соединен с источником питания через соединительный узел (6), при этом на активном элементе расположен подъемно-вращательный узел (10) с манипулятором (19).
3. Устройство по п.1, отличающееся тем, что активный элемент (3) содержит расположенный на нем приводной двигатель (7), выполненный в виде линейного двигателя.
4. Устройство по п.2, отличающееся тем, что активный элемент (3) содержит расположенный на нем приводной двигатель (7), выполненный в виде линейного двигателя.
5. Устройство по п.1, отличающееся тем, что на активном элементе (3) имеется электромагнитное соединительное устройство (6), расположенное напротив катушек (9), закрепленных на пассивном элементе (2) и используемых в качестве передающей антенны для передачи энергии к активному элементу (3).
6. Устройство по п.2, отличающееся тем, что на активном элементе (3) имеется электромагнитное соединительное устройство (6), расположенное напротив катушек (9), закрепленных на пассивном элементе (2) и используемых в качестве передающей антенны для передачи энергии к активному элементу (3).
7. Устройство по п.3, отличающееся тем, что на активном элементе (3) имеется электромагнитное соединительное устройство (6), расположенное напротив катушек (9), закрепленных на пассивном элементе (2) и используемых в качестве передающей антенны для передачи энергии к активному элементу (3).
8. Устройство по п.4, отличающееся тем, что на активном элементе (3) имеется электромагнитное соединительное устройство (6), расположенное напротив катушек (9), закрепленных на пассивном элементе (2) и используемых в качестве передающей антенны для передачи энергии к активному элементу (3).
9. Устройство по любому из пп.1-8, отличающееся тем, что во внутренней трубке (13) расположен центральный подъемный двигатель (14) с неподвижной вертикальной обмоткой (15) и намагничиваемый внутренний стержень (16), расположенный вертикально внутри трубки (13).
10. Устройство по п.9, отличающееся тем, что во внутренней трубке (13) расположен вращательный привод (17) для осуществления управляемого вращения внутренней трубки (13) относительно стержня (16).
11. Устройство по любому из пп.1-8, 10, отличающееся тем, что подъемно-вращательный узел (10) содержит четыре магнитные опоры (12), расположенные на внутренней периферийной поверхности внешней трубки (11) на одном или нескольких уровнях с взаимным угловым смещением 90°, для бесконтактного создания вертикальной направляющей внутренней трубки (13), которая выполнена с возможностью перемещения между двумя крайними положениями.
12. Устройство по п.9, отличающееся тем, что подъемно-вращательный узел (10) содержит четыре магнитные опоры (12), расположенные на внутренней периферийной поверхности внешней трубки (11) на одном или нескольких уровнях с взаимным угловым смещением 90°, для бесконтактного создания вертикальной направляющей внутренней трубки (13), которая выполнена с возможностью перемещения между двумя крайними положениями.
13. Устройство по любому из пп.1-8, 10 и 12, отличающееся тем, что верхний свободный конец (18) внутренней трубки (13) предназначен для крепления дополнительных элементов, таких как манипулятор (19) для удержания и перемещения плат (21).
14. Устройство по п.9, отличающееся тем, что верхний свободный конец (18) внутренней трубки (13) предназначен для крепления дополнительных элементов, таких как манипулятор (19) для удержания и перемещения плат (21).
15. Устройство по п.11, отличающееся тем, что верхний свободный конец (18) внутренней трубки (13) предназначен для крепления дополнительных элементов, таких как манипулятор (19) для удержания и перемещения плат (21).
16. Устройство по любому из пп.1-8, 10, 12, 14 и 15, отличающееся тем, что на манипуляторе (19) расположена электромагнитная подвижная вилка (20) для поддержания кремниевой платы (21).
17. Устройство по п.9, отличающееся тем, что на манипуляторе (19) расположена электромагнитная подвижная вилка (20) для поддержания кремниевой платы (21).
18. Устройство по п.11, отличающееся тем, что на манипуляторе (19) расположена электромагнитная подвижная вилка (20) для поддержания кремниевой платы (21).
19. Устройство по п.13, отличающееся тем, что на манипуляторе (19) расположена электромагнитная подвижная вилка (20) для поддержания кремниевой платы (21).
20. Устройство по п.16, отличающееся тем, что манипулятор (19) содержит магнитную опору (22) и электромагнитный привод (23) для убирания и выдвижения вилки (20).
21. Устройство по любому из пп.17-19, отличающееся тем, что манипулятор (19) содержит магнитную опору (22) и электромагнитный привод (23) для убирания и выдвижения вилки (20).
| US 5720010 A, 17.02.1998 | |||
| US 5397212 А, 14.03.1995 | |||
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| US 6045319 A, 04.04.2000 | |||
| US 5288199 A, 22.02.1994 | |||
| JP 4267355 A, 22.09.1992 | |||
| JP 4264749 A, 21.09.1992 | |||
| Устройство для транспортирования деталей | 1980 |
|
SU966794A1 |

