Предлагаемое изобретение относится к системам посадки, средствам обслуживания и обеспечения беспилотных летательных аппаратов (БПЛА) и предназначено для надежной и эффективной фиксации БПЛА на посадочной площадке безэкипажного судна.
Известно устройство для осуществления взлета и посадки судового БПЛА с использованием электромагнита, который фиксирует БПЛА после соприкосновения его посадочных опор с посадочной площадкой на палубе судна (Electromagnet-based takeoff and landing apparatus to operate ship – borne aerial vehicle in harsh condition. Патент Республики Корея KR1020190008046, от 23.01.2019). Устройство управляется по радиоканалу. При приземлении БПЛА на стальную палубу судна оператором по радиоканалу подается сигнал включения электромагнитов, которые размещены в посадочных опорах БПЛА, что обеспечивает их притяжение к палубе и фиксацию БПЛА.
Недостатками этого устройства являются:
- невозможность его использования в качестве средства посадки БПЛА на безэкипажное судно, так как оно требует наличие оператора, осуществляющего ручное управление;
- электромагниты, обеспечивающие фиксацию БПЛА на палубе судна после посадки, увеличивают массу БПЛА, что приводит к уменьшению полезной нагрузки на его борту и ухудшает летные характеристики БПЛА;
- для выполнения функций фиксации БПЛА на палубе после его посадки энергия для питания электромагнитов берется от автономного источника питания БПЛА, что уменьшает его автономность и общее полетное время;
- для зарядки аккумуляторных батарей БПЛА требуется выполнять ряд ручных операций, таких как подключение и отсоединение зарядного кабеля, что делает невозможным использование устройства на безэкипажном судне.
Известно, также, устройство для осуществления приземления БПЛА на посадочную площадку стационарного или движущегося объекта (Drone landing pad and drone landing method using same. Патент Республики Корея KR1020180043108, 27.04.2018 г.). Данное техническое решение наиболее близкое по технической сущности к заявляемому изобретению и принято за прототип.
Известное устройство содержит посадочную площадку, в которую установлен электромагнит, датчик приближения и блок управления, с помощью которых осуществляется контроль положения БПЛА относительно посадочной площадки, а также включение электромагнита в заданный момент времени, при этом посадочные опоры БПЛА содержат элементы из ферромагнитного материала, т.е. обладают свойством магнитного реагента. При сближении посадочных опор БПЛА с посадочной площадкой по сигналу датчика приближения от блока управления подается электроэнергия на электромагнит, который за счет возникшей магнитной связи между электромагнитом и магнитными реагентами посадочных опор притягивает последние и осуществляет фиксацию БПЛА на палубе подвижного объекта, способную выдерживать воздействие внешних возмущений в виде крена, дифферента или ветрового воздействия. Электромагнит получает энергию от системы энергообеспечения безэкипажного судна с автономным источником энергии в виде аккумуляторной батареи. Кроме этого, устройство содержит пульт ручного управления, от которого по сигналу оператора могут подключаться, а также отключаться удерживающие электромагниты, что дает возможность осуществить взлет БПЛА.
Автоматическое приземление БПЛА обычно сопровождается определенными ошибками относительно заданной точки посадки, что приводит к необходимости иметь увеличенные размеры посадочной площадки и, соответственно, увеличенные размеры электромагнита, соизмеримые с размерами посадочной площадки устройства. В этих условиях для создания магнитного поля с параметрами, обеспечивающими требуемое силовое взаимодействие с магнитным реагентом посадочных опор БПЛА, необходимо к электромагниту подводить соответствующую повышенную энергию и, вместе с тем, технически оправданный допустимый уровень подводимой энергии вынуждает ограничивать размеры посадочной площадки.
Кроме этого, в известном устройстве посадочная площадка дополнительно содержит блок беспроводной зарядки с первичной катушкой, который размещается во внутреннем пространстве посадочной площадки или на ее внешней поверхности.
Вместе с тем, вторичная катушка известного устройства расположена на БПЛА. В этом случае при посадке БПЛА и фиксации посадочных опор на посадочной площадке между первичной и вторичной катушками остается достаточно большое расстояние, определяемое, как минимум, высотой стоек посадочных опор. Это значительно снижает магнитную связь между катушками и для бесконтактной передачи электроэнергии приводит к необходимости увеличивать электрическую мощность, подводимую к первичной катушке, что при ограниченных запасах электроэнергии на безэкипажном судне является существенным недостатком. Кроме этого, известное устройство имеет еще следующие недостатки:
- ограниченные размеры посадочной площадки на судне требует высокой точности маневрирования БПЛА, которую затруднительно обеспечить при наличии качки, статического крена, дифферента или ветрового возмущения;
- большой расход электроэнергии автономного источника питания безэкипажного судна на питание удерживающего электромагнита посадочной площадки.
В основу предлагаемого изобретения поставлена задача создать устройство для автоматической фиксации беспилотного летательного аппарата на посадочной площадке безэкипажного судна с функцией бесконтактной передачи электроэнергии для заряда аккумуляторных батарей БПЛА, обеспечивающее экономичный процесс заряда аккумуляторных батарей, а также энергетически эффективную и надежную фиксацию БПЛА как в момент его посадки, так и в последующий до взлета интервал времени, длительность которого определяемый оператором, при наличии ветра, всех видов качки судна на волнении, а также при наличии больших статических кренов и дифферентов.
Поставленная задача достигается тем, что в устройстве для автоматической фиксации беспилотного летательного аппарата вертолетного типа на посадочной площадке безэкипажного судна c бесконтактной передачей электроэнергии для заряда аккумуляторных батарей, содержащем посадочную площадку, в которую установлено удерживающее средство в виде электромагнита, блок бесконтактной зарядки, датчик приближения БПЛА к посадочной площадке и блок управления, имеющий выход, предназначенный для управления электромагнитом. Выход датчика приближения связан с первым входом блока управления. Кроме этого, устройство содержит пульт ручного управления, выход которого связан со вторым входом блока управления. Удерживающее средство выполнено в виде N электромагнитов, имеющих малые габариты относительно размеров посадочной площадки, и образующие при включении равномерное поле локальных концентраций магнитного потока. В устройство введены также N ключей, N измерительных преобразователей тока и N идентификаторов координат электромагнитов, при этом в блоке управления предусмотрены N выходов и N входов, каждый из N выходов блока управления через шину управления (ШУ) связан с соответствующим управляющим входом электромагнита, а каждый из N входов – через шину обратных связей (ШОС) с выходом соответствующего измерительного преобразователя тока электромагнита и выходом идентификатора координат электромагнита. Питание на каждый из электромагнитов поступает от шины питания (ШП) через последовательно соединенные соответствующие ключ, измерительный преобразователь тока электромагнита и идентификатор координат электромагнита. При этом в посадочных опорах БПЛА размещены вторичные катушки, связанные через зарядное устройство с его аккумуляторной батареей, которые при посадке БПЛА находятся в зоне локальных концентраций магнитного потока, создаваемых электромагнитами с разомкнутыми магнитопроводами, являющимися, в этом случае, первичными катушками для бесконтактной передачи электроэнергии. Посадочная опора содержит ферромагнитный экран, конфигурация которого позволяет совмещать функции как магнитопровода для магнитного потока между магнитосвязанными первичными и вторичной катушками при бесконтактной передаче электроэнергии, так и магнитного реагента для осуществления фиксации беспилотного летательного аппарата на посадочной опоре, при этом количество первичных катушек, магнитосвязанных с вторичной катушкой, равно двум или более.
В заявленном устройстве для автоматической фиксации беспилотного летательного аппарата вертолетного типа на посадочной площадке безэкипажного судна с бесконтактной передачей электроэнергии для заряда аккумуляторных батарей общими существенными для него и для его прототипа признаками являются:
- посадочная площадка;
- удерживающее средство в виде электромагнита, датчик приближения и блок управления;
- пульт ручного управления;
- блок бесконтактной зарядки;
- выход датчика приближения связан с первым входом блока управления;
- выход ручного пульта управления связан со вторым входом блока управления,
- выход блока управления предназначен для управления электромагнитом.
Сопоставительный анализ существенных признаков заявленного устройства и прототипа показывает, что первый в отличие от прототипа имеет следующие отличительные признаки:
- удерживающее средство выполнено в виде N электромагнитов, имеющих малые габариты относительно размеров посадочной площадки и образующие при включении равномерное поле локальных концентраций магнитного потока;
- введены N ключей, N измерительных преобразователей тока и N идентификаторов координат электромагнитов;
- в блоке управления выполнены N выходов и N входов, каждый из N выходов блока управления через ШУ связан с соответствующим управляющим входом электромагнита, а каждый из N входов – через ШОС с выходом соответствующего измерительного преобразователя тока электромагнита и выходом идентификатора координат электромагнита;
- питание на каждый из электромагнитов поступает от ШП через последовательно соединенные соответствующие ключ, измерительный преобразователь тока электромагнита и идентификатор координат электромагнита;
- блок бесконтактной зарядки образован магнитосвязанными вторичными и первичными катушками, причем вторичные катушки размещены в посадочных опорах, а первичными катушками являются обмотки электромагнитов в зоне перекрытия их вторичными катушками при посадке БПЛА на посадочную площадку;
- в посадочной опоре установлен ферромагнитный экран, конфигурация которого совмещает функции как магнитопровода для магнитного потока между магнитосвязанными первичными и вторичной катушками при бесконтактной передаче электроэнергии, так и магнитного реагента для осуществления фиксации беспилотного летательного аппарата на посадочной площадке.
Отличительные признаки предлагаемого решения выполняют следующие функциональные задачи для достижения требуемого технического результата.
Признаки «… удерживающее средство выполнено в виде N электромагнитов, имеющих малые габариты относительно размеров посадочной площадки и образующие при включении равномерное поле локальных концентраций магнитного потока, … введены N ключей, N измерительных преобразователей тока и N идентификаторов координат электромагнитов» – позволяют использовать для удержания и фиксации БПЛА на посадочной площадке из общего количества N электромагнитов некоторое ограниченное число электромагнитов, взаимодействующих с магнитными реагентами посадочных опор, с соответствующим уменьшенным потреблением суммарной электроэнергии от источника безэкипажного судна при увеличении размеров посадочной площадки до требуемых значений, при которых будет обеспечиваться надежная посадка БПЛА на безэкипажное судно в автоматическом режиме при наличии ветра, всех видов качки судна на волнении, а также при наличии больших статических кренов и дифферентов.
Признаки «…- питание на каждый из электромагнитов поступает от ШП через последовательно соединенные соответствующие ключ, измерительный преобразователь тока электромагнита и идентификатор координат электромагнита, ... блок бесконтактной зарядки образован магнитосвязанными вторичными и первичными катушками, причем вторичные катушки размещены в посадочных опорах, а первичными катушками являются обмотки электромагнитов в зоне перекрытия их вторичными катушками при посадке БПЛА на посадочную площадку, ... в посадочной опоре установлен ферромагнитный экран, конфигурация которого совмещает функции как магнитопровода для магнитного потока между магнитосвязанными первичными и вторичной катушками при бесконтактной передаче электроэнергии, так и магнитного реагента для осуществления фиксации беспилотного летательного аппарата на посадочной площадке» – позволяют увеличить эффективность бесконтактной передачи электроэнергии, а также идентифицировать конкретные электромагниты, магнитопроводы которых перекрыты магнитными реагентами посадочных опор, и проекцией вторичной катушки, что позволяет отключать электромагниты, не участвующие в удержании и фиксации БПЛА, а также в передаче электроэнергии и, тем самым, снизить общее потребление электроэнергии от автономного источника безэкипажного судна и повысить общую энергетическую эффективность устройства.
Таким образом, отличительные существенные признаки заявленного устройства для автоматической фиксации беспилотного летательного аппарата вертолетного типа на посадочной площадке безэкипажного судна с бесконтактной передачей электроэнергии для заряда аккумуляторных батарей, в совокупности с признаками, общими для него и прототипа, обеспечивают достижение технического результата, т.е. находятся с техническим результатом в причинно-следственной связи и решают поставленную задачу.
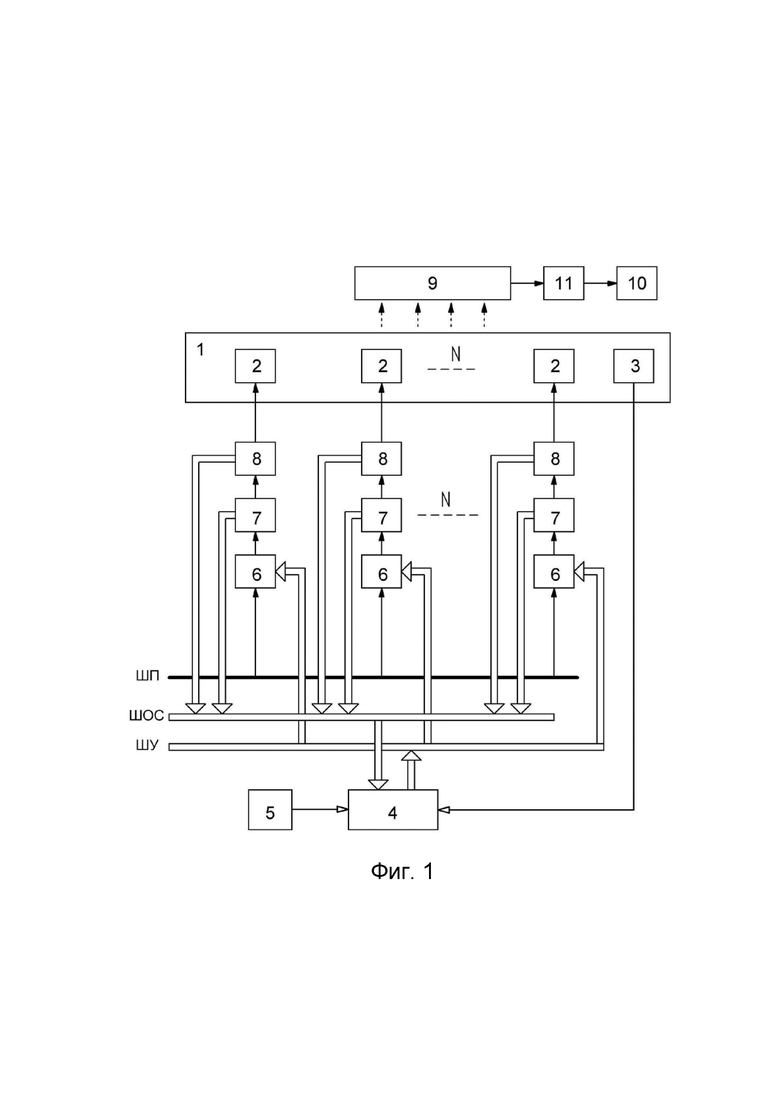
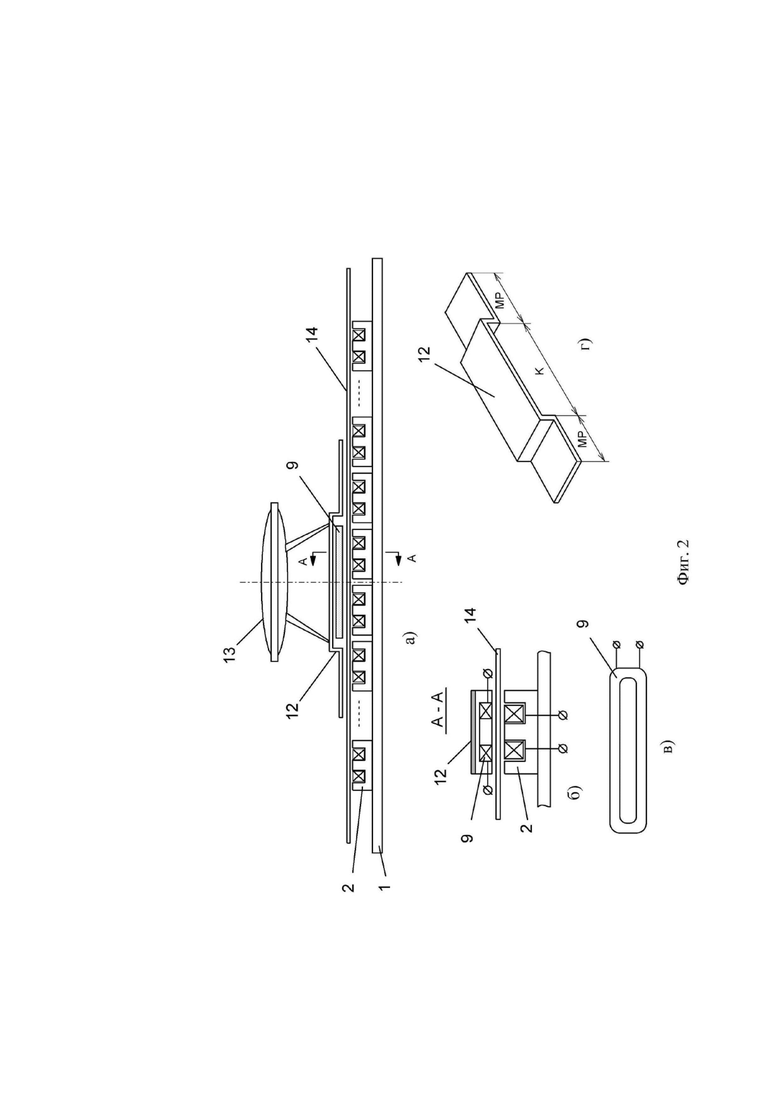
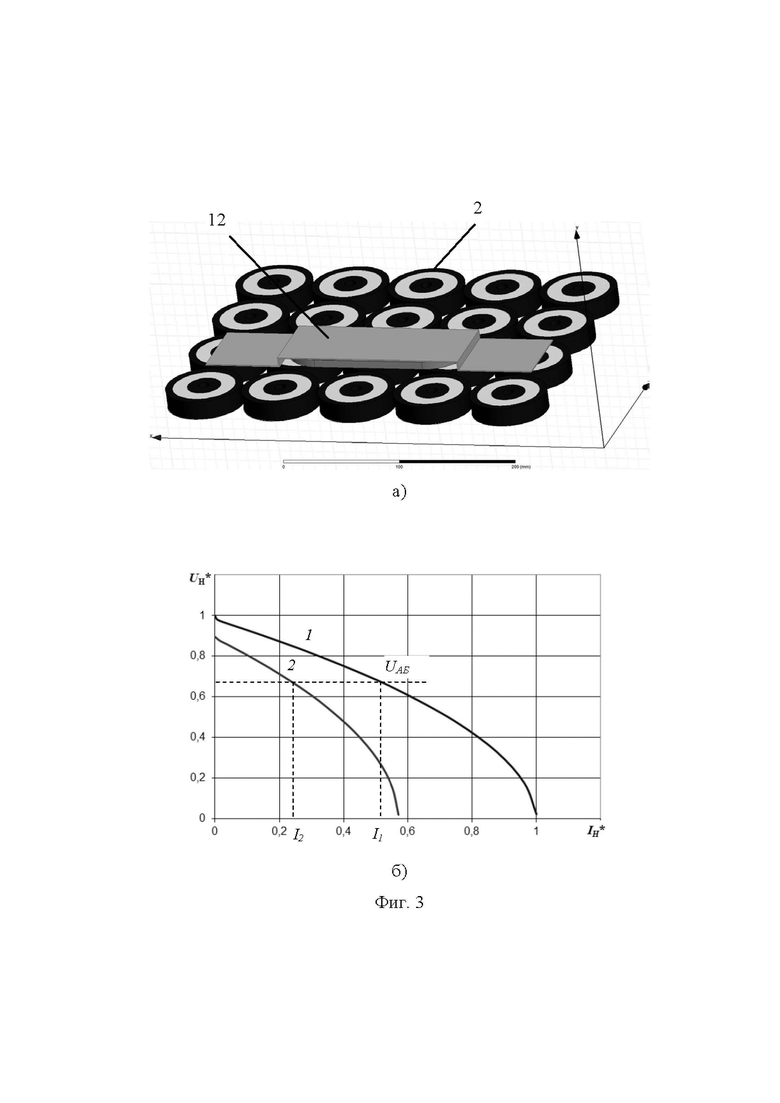
Сущность изобретения поясняется чертежами, где: на фиг. 1 представлена функциональная схема устройства; на фиг. 2 показаны элементы конструкции посадочной опоры, где а) – расположение БПЛА на посадочной площадке, б) – взаимное расположение электромагнита с первичной катушкой и вторичной катушки с посадочной опорой, в) конфигурация вторичной катушки, г) конфигурация ферромагнитного экрана в составе посадочной опоры, на фиг. 3 приведены результаты исследования в программном пакете ANSIS Maxwell процесса электромагнитного взаимодействия между первичными и вторичной катушками при бесконтактной передаче электроэнергии: а) схема модели, б) зависимости напряжения на выходе вторичной катушки от тока нагрузки при различных вариантах совмещений первичной и вторичной катушек. При этом на фиг. 1 дополнительно обозначено: ШП – шина питания, ШОС – шина обратных связей, ШУ – шина управления. На фиг.2 г) обозначены: МР – зона ферромагнитного реагента, К – зона размещения вторичной катушки.
Устройство для автоматической фиксации беспилотного летательного аппарата вертолетного типа на посадочной площадке безэкипажного судна с бесконтактной передачей электроэнергии для заряда аккумуляторной батареи (фиг. 1), содержит посадочную площадку 1, N электромагнитов 2, датчик 3 приближения БПЛА к посадочной площадке 1, блок 4 управления, пульт 5 ручного управления, N ключей 6, N измерительных преобразователей 7 тока электромагнита, N идентификаторов 8 координат электромагнита, вторичную катушку 9 и зарядное устройство 10 с аккумуляторной батареей 11, а также (фиг.2) посадочную опору - 12, БПЛА -13 и немагнитное защитное покрытие - 14. Выход датчика 3 приближения БПЛА к посадочной площадке 1 связан с первым входом блока 4 управления, а пульт 5 ручного управления соединен со вторым входом блока 4 управления. Питание на каждый из электромагнитов поступает от ШП через последовательно соединенные ключ 6, измерительный преобразователь 7 тока электромагнита и идентификатор 8 координат электромагнита. Управляющие входы каждого из N ключей 6 через ШУ соединены с N выходами блока 4 управления, а каждый из N дополнительных входов блока 4 управления через ШОС связан с выходом соответствующего измерительного преобразователя 7 тока электромагнита и выходом идентификатора 8 координат электромагнита. Вторичная катушка 9 соединена через зарядное устройство 10 с аккумуляторной батареей 11.
Устройство для автоматической фиксации беспилотного летательного аппарата вертолетного типа на посадочной площадке безэкипажного судна с бесконтактной передачей электроэнергии для заряда аккумуляторной батареи работает следующим образом.
От пульта 5 ручного управления активируется режим посадки БПЛА 13, после чего по сигналу от датчика 3 приближения выполняется контроль взаимного положения БПЛА и посадочной площадки 1. При сближении БПЛА с посадочной площадкой 1 на заданное расстояние по сигналу от блока 4 управления включаются все N электромагнитов 2. На посадочной площадке 1 образуется поле локальных концентраций магнитного потока. При попадании магнитных реагентов посадочных опор 12 в зону концентраций магнитного потока за счет магнитного взаимодействия осуществляется притяжение посадочных опор к посадочной площадке 1. При этом число электромагнитов 2, с которыми происходит непосредственное контактирование посадочных опор 12, будет определяться суммарной площадью зоны ферромагнитных реагентов посадочных опор и площадью проекции вторичной катушки 9 на поле электромагнитов 2 при заданном шаге их установки на посадочной площадке 1.
Каждый отдельный электромагнит 2, входящий в состав посадочной площадки 1 и находящийся внутри периметра посадочной опоры 12, в зависимости от взаимного расположения с опорой 12, выполняет или функцию фиксации БПЛА за счет притяжения ферромагнитных реагентов посадочной опоры 12, или является первичной катушкой в электромагните 2 в системе бесконтактной передачи электроэнергии.
Электромагниты 2 имеют магнитопровод, разомкнутый с верхней стороны (фиг. 2, а, б), т.е. при посадке БПЛА и приближении ферромагнитного реагента к электромагниту происходит замыкание его магнитопровода, что вызывает уменьшение магнитного сопротивления и соответствующее увеличение индуктивного сопротивления катушки электромагнита 2. При этом существенно снижается ток в его катушке, что регистрируется в измерительном преобразователе 7 тока и является индикатором конкретных электромагнитов, контактирующих с зонами ферромагнитных реагентов посадочных опор. Позиции этих электромагнитов в пределах посадочной площадки 1 определяются идентификатором 8 координат электромагнитов 2. Позиции электромагнитов, участвующих в создании магнитной связи с вторичной катушкой, определяются по геометрическому месту зоны (К), расположенной между зонами (МР) ферромагнитных реагентов посадочной опоры 1 (фиг. 2, г) и также регистрируются идентификатором 8.
Таким образом, при посадке БПЛА выполняется идентификация координат электромагнитов, перекрываемых контуром посадочной площадки, что позволяет указанные выделенные электромагниты оставить включенными, а электромагниты, находящиеся за периметром посадочной опоры – отключить.
В итоге при посадке БПЛА 13 на посадочную площадку 1 под посадочной опорой 12 находятся определенное число включенных электромагнитов, одна часть которых обеспечивает фиксацию БПЛА 13 за счет притяжения к ним посадочных опор 12 через ферромагнитные реагенты (МР), а другая – выполняет функцию первичной катушки, магнитосвязанной с вторичной катушкой и осуществляет бесконтактную передачу электроэнергии на БПЛА для заряда его аккумуляторных батарей.
За счет отключения не используемых электромагнитов существенно снижается потребляемая электроэнергия от автономного источника безэкипажного судна и повышается энергетическая эффективность устройства. Использование N электромагнитов с распределенными по посадочной площадке зонами локальных концентраций магнитного потока, ограниченное количество которых обладает способностью надежно удерживать и фиксировать БПЛА на посадочной площадке, позволяет также выполнить площадку с увеличенными размерами, достаточными для посадки БПЛА без предъявления повышенных требований к точности его маневрирования.
При необходимости осуществить взлет БПЛА 13 оператором через пульт 5 ручного управления подается соответствующая команда на блок 4 управления, отключающая удерживающие электромагниты.
Результаты моделирования (фиг. 3) процесса бесконтактной передачи электроэнергии как результата электромагнитного взаимодействия между первичными и вторичной катушками позволили определить зависимости напряжения UН* на выходе вторичной катушки от тока нагрузки IН* для различных взаимных положениях вторичной катушки относительно первичных. Зависимости UН*(IН*) определены в относительном виде, где базовой величиной является напряжение на выходе вторичной катушки при холостом ходе и максимальном значении коэффициента магнитной связи между катушками, что имеет место при перекрытии обводами площади вторичной катушки максимально возможного числа первичных катушек при выбранных параметрах. При смещении или повороте вторичной катушки площадь электромагнитного взаимодействия уменьшается, что приводит к снижению коэффициента магнитной связи и некоторому соответствующему уменьшению передаваемой электрической мощности, но с сохранением процесса заряда аккумуляторных батарей. Это наглядно иллюстрируют графики на фиг. 3б, где характеристики 1 и 2 определены для максимального и возможного минимального коэффициентов магнитной связи, откуда следует, что для заряда аккумуляторной батареи до напряжения UАБ во втором случае может потребоваться примерно в два раза больше времени, что следует из сопоставления значений токов I1 и I2. Вместе с тем, система остается в работоспособном состоянии и процесс бесконтактной передачи электроэнергии осуществляется с достаточной эффективностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической фиксации беспилотного летательного аппарата вертолетного типа | 2020 |
|
RU2751735C1 |
| Система автоматической дозаправки беспилотного летательного аппарата | 2020 |
|
RU2757400C1 |
| Пост наблюдения на базе привязного беспилотного летательного аппарата | 2023 |
|
RU2807768C1 |
| Способ освещения подводной обстановки и нейтрализации обнаруженных объектов | 2022 |
|
RU2789185C1 |
| БЕЗЭКИПАЖНЫЙ КАТЕР, ОСНАЩЕННЫЙ УСТРОЙСТВОМ ДЛЯ ПОДЗАРЯДКИ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ВЕРТОЛЕТНОГО ТИПА | 2023 |
|
RU2831111C1 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| Система доставки груза горнодобывающим субъектом на место проведения взрывных работ (варианты) | 2024 |
|
RU2839710C1 |
| Многоцелевой беспилотный летательный аппарат | 2021 |
|
RU2763896C1 |
| Беспилотный летательный аппарат и способ посадки такого аппарата | 2022 |
|
RU2808061C1 |
| СИСТЕМА ДОСТАВКИ ГРУЗА | 2018 |
|
RU2689643C1 |
Устройство для автоматической фиксации беспилотного летательного аппарата (БПЛА) вертолетного типа на посадочной площадке безэкипажного судна c бесконтактной передачей электроэнергии для заряда аккумуляторных батарей содержит посадочную площадку (1), N электромагнитов (2), датчик (3) приближения БПЛА к посадочной площадке (1), блок управления (4), пульт ручного управления (5), N ключей (6), N измерительных преобразователей тока электромагнита (7), N идентификаторов координат электромагнита (8), вторичную катушку (9), зарядное устройство (10) с аккумуляторной батареей (11), посадочную опору (12), немагнитное защитное покрытие (14). Обеспечивается экономичный процесс заряда аккумуляторных батарей БПЛА, повышение надежности фиксации БПЛА в момент посадки и до момента взлета. 3 ил.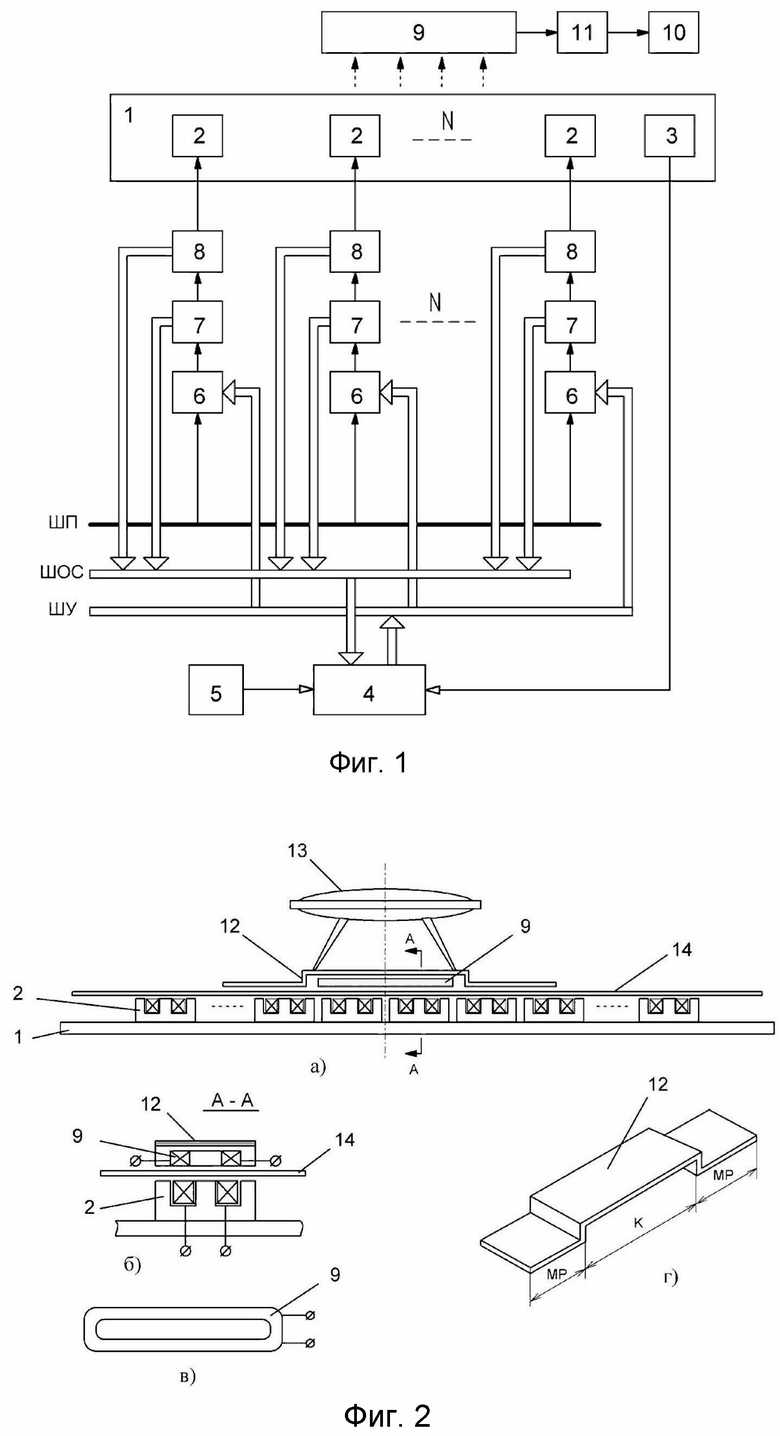
Устройство для автоматической фиксации беспилотного летательного аппарата вертолетного типа на посадочной площадке безэкипажного судна c бесконтактной передачей электроэнергии для заряда аккумуляторных батарей, содержащее посадочную площадку, в которую установлено удерживающее средство в виде электромагнита, блок бесконтактной зарядки, датчик приближения БПЛА к посадочной площадке и блок управления, имеющий выход, предназначенный для управления электромагнитом, причем выход датчика приближения связан с первым входом блока управления, кроме этого устройство содержит пульт ручного управления, выход которого связан со вторым входом блока управления, отличающееся тем, что удерживающее средство выполнено в виде N электромагнитов, имеющих малые габариты относительно размеров посадочной площадки и образующих при включении равномерное поле локальных концентраций магнитного потока, введены также N ключей, N измерительных преобразователей тока и N идентификаторов координат электромагнитов, при этом в блоке управления предусмотрены N выходов и N входов, каждый из N выходов блока управления через шину управления связан с соответствующим управляющим входом электромагнита, а каждый из N входов – через шину обратных связей с выходом соответствующего измерительного преобразователя тока электромагнита и выходом идентификатора координат электромагнита, питание на каждый из электромагнитов поступает от шины питания через последовательно соединенные соответствующие ключ, измерительный преобразователь тока электромагнита и идентификатор координат электромагнита, при этом в посадочных опорах БПЛА размещены вторичные катушки, связанные через зарядное устройство с его аккумуляторной батареей, которые при посадке БПЛА находятся в зоне локальных концентраций магнитного потока, создаваемых электромагнитами с разомкнутыми магнитопроводами, являющимися, в этом случае, первичными катушками для бесконтактной передачи электроэнергии, посадочная опора содержит ферромагнитный экран, конфигурация которого позволяет совмещать функции как магнитопровода для магнитного потока между магнитосвязанными первичными и вторичной катушками при бесконтактной передаче электроэнергии, так и магнитного реагента для осуществления фиксации беспилотного летательного аппарата на посадочной опоре, при этом количество первичных катушек, магнитосвязанных со вторичной катушкой, равно двум или более.
| ПОЛУАВТОМАТ ДЛЯ НАБОРКИ СТОПОРОВ СТАЛЕРАЗЛИВОЧНЫХ КОВШЕЙ | 0 |
|
SU185019A1 |
| 0 |
|
SU194136A1 | |
| KR 1020170040960 A, 14.04.2017 | |||
| KR 1020170036297 A, 03.04.2017 | |||
| CN 106985977 A, 28.07.2017. | |||

