Изобретение относится к области малогабаритных летательных аппаратов с несущими винтами с дистанционным управлением по радиоканалу, пилотируемых с применением установленной на борту видеокамеры.
Известен беспилотный вертолет-гексакоптер БПЛА ZALA 421-21 тактической дальности с системой автоматического управления (автопилот), навигационной системой (GPS/ ГЛОНАСС), встроенной цифровой системой телеметрии, навигационными огнями, встроенным 3-х осевым магнитометром, аналоговым видеопередатчиком, радиомодемом с приемником спутниковой навигационной системы (СНС) «Диагональ ВОЗДУХ» и поисковым передатчиком (см. © ZALA AERO GROUP Беспилотные летательные аппараты БПЛА, 2014. Режим доступа http://zala.aero/zala-421-21/). Тип двигателя мультикоптера - электрический тянущий - шестироторная схема. Устройство снабжено аккумуляторной батареей (АКБ) 10000 мАч 3S и рассчитано на продолжительность полета 35 минут, включая полет от точки возврата до точки зарядки аккумуляторной батарее и радиус действия видео/радиоканала 2 км / 2 км.
Недостатком такого мультикоптера является ограниченный энергоресурс, определяемый емкостью АКБ, что ограничивает возможный радиус применения устройства.
Наиболее близкими к предлагаемому техническому решению являются беспилотный летательный аппарат (Power line sentry charging согласно US 7398946 B1, МПК), который является комбинацией устройств с толкающим (тянущим) и несущим винтами, приводимыми в действие электродвигателями, питаемыми от аккумуляторной батареи.
Беспилотный летательный аппарат содержит несущую раму, электрические двигатели с несущими винтами, укрепленные на консолях несущей рамы, электронное оборудование, включающее системы автоматического и ручного дистанционного управления, систему цифровой телеметрии и навигации, например спутниковой, системы видеонаблюдения, в том числе и в обеспечение служебных целей, например, за положением летательного аппарата относительно окружающих объектов, аккумуляторную батарею, автономную систему зарядки аккумуляторной батареи, включающую обмотку, размещенную на магнитопроводе, выполненном разъемным, состоящем из двух частей, первая из которых неподвижная, на которой размещена обмотка, имеет U-образную форму и установлена над центром масс малогабаритного мультикоптера выше его несущих винтов, а вторая часть разъемного магнитопровода подвижна, первым концом присоединена с помощью шарнира к первому концу первой части разъемного магнитопровода, а второй ее конец допускает перемещение до замыкания со вторым концом первой части магнитопровода и фиксации взаимного положения частей магнитопровода, обмотка подключена к преобразователю переменного напряжения в постоянное напряжение, выход преобразователя подключен к зарядному устройству аккумуляторной батареи.
Автономная зарядка аккумуляторной батареи достигается в результате фиксированного положения силового фазного провода в окне замкнутого магнитопровода при положении аппарата под силовым фазным проводом. Процесс ввода силового фазного провода в окно магнитопровода осуществляется оператором дистанционно при перемещении беспилотного летательного аппарата в пространстве в вертолетном режиме и при разомкнутом состоянии магнитопровода летательного аппарата. Замыкание магнитопровода, необходимое для создания напряжения зарядки АКБ на зажимах обмотки, осуществляется с помощью действия вспомогательного энергозависимого устройства (например, двигателя).
Недостатком таких беспилотных летательных аппаратов является сложная и неэкономичная система замыкания магнитопровода для обеспечения автономной зарядки аккумуляторной батареи от силовых проводов линий передачи.
Технической задачей предлагаемого изобретения является упрощение системы оперативной автономной подзарядки АКБ и повышение энергетической эффективности беспилотного летательного аппарата с несущими винтами.
Технический результат изобретения заключается в повышении экономичности и увеличении продолжительности времени как автономной, так и полезной работы беспилотного летательного аппарата с несущими винтами.
Это достигается тем, что известное устройство беспилотного летательного аппарата, содержащее несущую раму, электрические двигатели с несущими винтами, укрепленные на консолях несущей рамы, электронное оборудование, включающее системы автоматического и ручного дистанционного управления, систему цифровой телеметрии и навигации, например спутниковой, системы видеонаблюдения, в том числе и в обеспечение служебных целей, например, за положением летательного аппарата относительно окружающих объектов, аккумуляторную батарею, автономную систему зарядки аккумуляторной батареи, включающую обмотку, размещенную на магнитопроводе, выполненном разъемным, состоящем из двух частей, первая из которых неподвижная, на которой размещена обмотка, имеет U-образную форму и установлена над центром масс малогабаритного мультикоптера выше его несущих винтов, а вторая часть разъемного магнитопровода подвижна, первым концом присоединена с помощью шарнира к первому концу первой части разъемного магнитопровода, а второй ее конец допускает перемещение до замыкания со вторым концом первой части магнитопровода и фиксации взаимного положения частей магнитопровода, обмотка подключена к преобразователю переменного напряжения в постоянное напряжение, выход преобразователя подключен к зарядному устройству аккумуляторной батареи, снабжено немагнитной гибкой лентой, кронштейном из немагнитного материала, пружиной, работающей на растяжение, отрезком медной ленты и управляемым электрическим ключом, торцевые поверхности концов U-образной первой части магнитопровода выполнены ортогональными направлению его средней линии, длина гибкой ленты равна длине периметра окружности, вписанной в окно магнитопровода, один конец немагнитной гибкой ленты закреплен внутри окна магнитопровода на втором конце первой части магнитопровода, а второй конец немагнитной гибкой ленты закреплен на втором конце второй части магнитопровода внутри окна магнитопровода, вторая часть магнитопровода выполнена в виде бруска, площадь поперечного сечения которой равна площади поперечного сечения первой части магнитопровода, кронштейн одним концом прикреплен к внешней поверхности первой части магнитопровода со стороны шарнира, а ко второму его концу присоединен первый конец пружины, второй конец которой прикреплен к внешней поверхности второй части магнитопровода, длина пружины в сжатом состоянии определяет ортогональное положение второй части магнитопровода относительно торцевых поверхностей первой части магнитопровода, усилие пружины в растянутом состоянии на 10% выше механического момента, определяемого весом второй части магнитопровода и точкой крепления пружины относительно шарнира, сечение магнитопровода обеспечивает превышение на 10% силы магнитного поля, соединяющей части магнитопровода при рабочей силе тока в фазном проводе, полного веса беспилотного летательного аппарата, отрезок медной ленты образует виток по периметру поперечного сечения первой части магнитопровода, концы отрезка медной ленты соединены управляемым электрическим ключом.
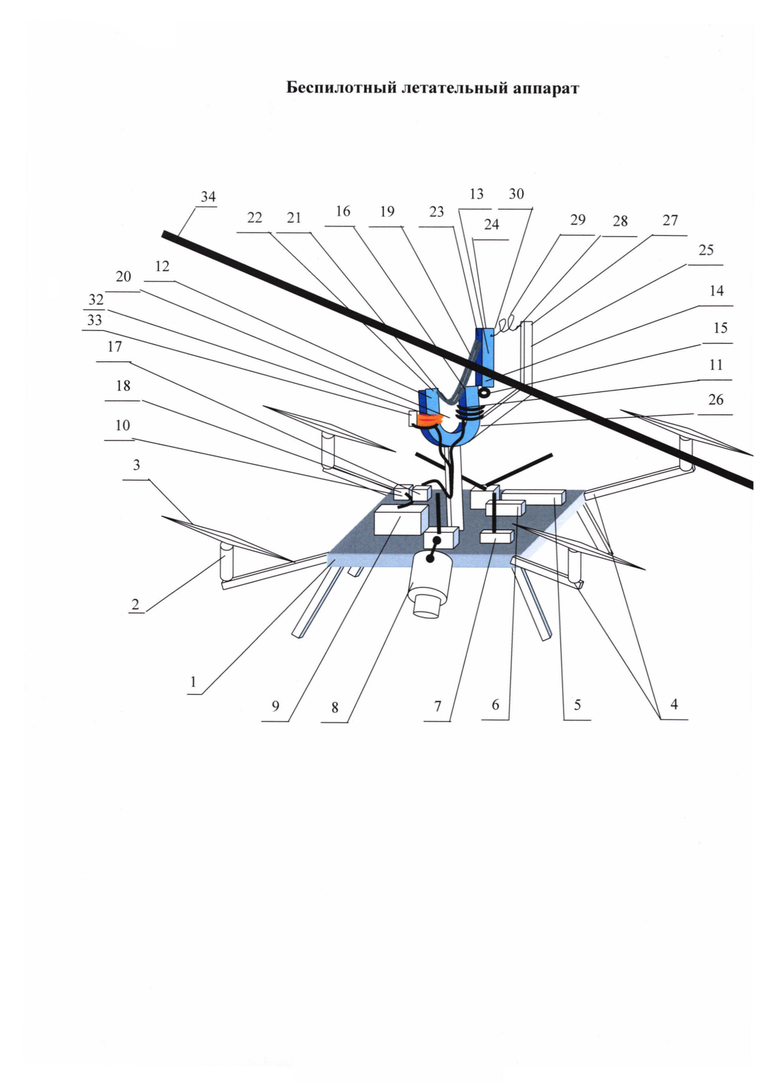
Сущность технического решения поясняется чертежом, на котором показана структура беспилотного летательного аппарата.
Беспилотный летательный аппарат содержит несущую раму 1, электрические двигатели 2 с несущими винтами 3, укрепленные на консолях 4 несущей рамы 1, электронное оборудование, включающее системы автоматического 5 и ручного 6 дистанционного управления, систему 7 цифровой телеметрии и навигации, например спутниковой, системы 8 видеонаблюдения, в том числе и в обеспечение служебных целей, например, за положением летательного аппарата относительно окружающих объектов, аккумуляторную батарею 9, автономную систему 10 зарядки аккумуляторной батареи 9, включающую обмотку 11, размещенную на магнитопроводе, выполненном разъемным, состоящем из двух частей 12 и 13. Первая часть 12, из которых, неподвижная, на ней размещена обмотка 11. Эта часть магнитопровода имеет U-образную форму и установлена над центром масс малогабаритного мультикоптера выше его несущих винтов 3. Вторая часть 13 магнитопровода выполнена в виде бруска, площадь поперечного сечения которого равна площади поперечного сечения первой части магнитопровода, подвижна, первым концом 14 присоединена с помощью шарнира 15 к первому концу 16 первой части 12 разъемного магнитопровода, а второй конец второй части 13 разъемного магнитопровода допускает перемещение до замыкания со вторым концом первой части 12 магнитопровода. Обмотка 11 магнитопровода подключена к преобразователю 17 переменного напряжения в постоянное напряжение, выход преобразователя 17 подключен к зарядному устройству 18 аккумуляторной батареи 9. Немагнитная гибкая лента 19, длина которой равна длине периметра окружности, вписанной в окно 20 магнитопровода, одним концом 21 закреплена внутри окна 20 магнитопровода на втором конце 22 первой части 12 магнитопровода, а второй конец 23 немагнитной гибкой ленты 19 закреплен на втором конце 24 второй части 13 магнитопровода внутри окна 20 магнитопровода. Кронштейн 25 из немагнитного материала одним концом 26 прикреплен к внешней поверхности первой части 12 магнитопровода со стороны шарнира 15, а ко второму его концу 27 присоединен первый конец 28 пружины 29. Второй конец 30 пружины 29 прикреплен к внешней поверхности второй части 13 магнитопровода. Длина пружины 29 в сжатом состоянии определяет ортогональное положение второй части 13 магнитопровода относительно торцевых поверхностей первого конца 16 и второго конца 22 первой части 12 магнитопровода. Отрезок медной ленты 32 образует виток по периметру поперечного сечения первой части 12 магнитопровода, концы отрезка медной ленты 32 соединены управляемым электрическим ключом 33.
Режим зарядки аккумуляторной батареи 9 обеспечивает положение фазного провода 34 в окне 20 магнитопровода при замкнутых частях 12 и 13. Беспилотный летательный аппарат работает следующим образом.
В рабочем режиме летательный аппарат либо осуществляет полет в автоматическом режиме с применением системы автоматического управления 5, либо направляется оператором с применением системы дистанционного оборудования канала управления 6 на основе данных поступающих оператору от видеосистемы 8. Полетное время летательного аппарата ограничено емкостью аккумуляторной батареи 9, обеспечивающей электропитание двигателей 2, видеосистемы 8, состоящей из видеокамеры и передающего оборудования канала наблюдения, и приемо-передающего оборудования канала управления 6. С течением времени в процессе разрядки аккумуляторной батареи 9 до 80% мультикоптер в полетном режиме подводится оператором или автоматически подлетает к фазному проводу 34 воздушной линии электроснабжения и перемещается до положения фазного провода 34 в пространстве над окном 20 магнитопровода между первой 12 и второй 13 разъемными частями. При этом, так как пружина 29 обеспечивает ортогональное положение второй части 13 магнитопровода относительно торцевых поверхностей концов 16 и 22 первой части 12 магнитопровода, то этим обеспечивает свободное проникновение фазного провода 34 в окно 20 магнитопровода. Таким образом, при перемещении беспилотного летательного аппарата вверх, фазный провод 34 перемещается внутрь окна 20 магнитопровода и за счет давления на немагнитную гибкую ленту 19 изменяет положение подвижной части 13 разъемного магнитопровода, которая за счет шарнира 15, которым соединена с неподвижной частью 12 магнитопровода, вращаясь вокруг шарнира 15, замыкает магнитопровод.
Сечение магнитопровода выбрано исходя из условия превышения на 10% силой притяжения частей 12 и 13 магнитопровода веса беспилотного летательного аппарата при номинальном токе в фазном проводе 34. Формула связи силы F магнитного поля, соединяющей части 12 и 13 магнитопровода с площадью S поперечного сечения имеет вид:
 ,
,
где μ0=4π⋅10-7 Гн/м; I - ток фазного провода; μr - относительная магнитная проницаемость материала магнитопровода;  - длина средней линии магнитопровода (суммы длин частей 12 и 13). Это обеспечивает устойчивое положение аппарата на фазном проводе в процессе зарядки АКБ. Поэтому при замыкании частей 12 и 13 магнитопровода двигатели 2 беспилотного летательного аппарата выключаются и он зависает на фазном проводе 34.
- длина средней линии магнитопровода (суммы длин частей 12 и 13). Это обеспечивает устойчивое положение аппарата на фазном проводе в процессе зарядки АКБ. Поэтому при замыкании частей 12 и 13 магнитопровода двигатели 2 беспилотного летательного аппарата выключаются и он зависает на фазном проводе 34.
Протекание тока по фазному проводу магнитопровода возбуждает в нем магнитное поле, которое через обмотку 11 наводит в преобразователе 17 переменного напряжения в постоянное напряжение выходное напряжение, которое прикладывается к входу зарядного устройства 18 аккумуляторной батареи 9 и осуществляет ее зарядку. Процесс зарядки аккумуляторной батареи занимает определенное время, в течение которого аппарат висит на фазном проводе 34 на замкнутом частями 12 и 13 магнитопроводе. По завершении процесса зарядки (контроль за которым осуществляется автоматически зарядным устройством 18 аккумуляторной батареи 9) двигатели 2 беспилотного летательного аппарата запускаются, подвижная вторая часть 13 размыкает магнитопровод и аппарат освобождается от фазного провода (отходит от него). Затем функциональный дистанционно управляемый режим полета беспилотного летательного аппарата возобновляется.
Размыкание второй части 13 магнитопровода осуществляется при замыкании концов отрезка медной ленты 32, образующей виток по периметру поперечного сечения первой части 12 магнитопровода, управляемым электрическим ключом 33. Короткозамкнутый виток за счет насыщения магнитопровода ослабляет силу притяжения частей 12 и 13 магнитопровода до значений меньше силы действия растянутой пружины 29, первый конец 28 которой прикреплен ко второму концу 27 кронштейна 25, а второй конец 30 пружины 29 прикреплен к внешней поверхности второй части 13 магнитопровода.
Кронштейн 25, одним концом 26 прикрепленный к внешней поверхности первой части 12 магнитопровода со стороны шарнира 15, определяет: 1) длину пружины 29 в сжатом состоянии, 2) ортогональное положение второй части 13 магнитопровода относительно торцевых поверхностей концов 16 и 22 первой части 12 магнитопровода и 3) усилие растянутой пружины при замкнутом состоянии частей 12 и 13 магнитопровода, которое больше массы бруска - части 13 магнитопровода (достаточно превышения на 10% для уверенного размыкания частей магнитопровода при отходе беспилотного летательного аппарата от фазного провода), но меньше (на 10%) массы беспилотного летательного аппарата, т.е. силы притяжения частей 12 и 13 магнитопровода в замкнутом состоянии при номинальном токе фазного провода 34.
Процесс размыкания подвижной части 15 магнитопровод 11 и освобождения аппарата от фазного провода может быть обеспечен как в автоматическом (автономном) режиме, так и ручном, по команде оператора.
Использование системы автоматического замыкания магнитопровода, за счет действия немагнитной гибкой ленты 19, системы автоматического размыкания частей 12 и 13 магнитопровода, обеспеченной отрезком медной ленты 32 управляемой электрическим ключом 33, и пружиной 28 обеспечивает повышение надежности, экономичности и увеличение продолжительности времени как автономной, так и полезной работы беспилотного летательного аппарата.
При этом повышение экономичности и увеличение продолжительности времени работы беспилотного летательного аппарата достигается применением механичеки простой и экономичной системы управления состоянием магнитопровода, определяющего процесс зарядки аккумуляторной батареи.
Для реализации процесса подзарядки такого беспилотного летательного аппарата достаточно наличия любой воздушной линии электропередачи с величиной действующего значения фазного тока от 50 А. Это могут быть как низковольтные, так и высоковольтные линии передачи. Уровень высокого напряжения в линии не влияет на работу устройства, так как все части беспилотного летательного аппарата оказываются в эквипотенциальном состоянии относительно напряжения на проводах линии.
Рабочее устройство по данной заявке разработано на базе гексакоптера RC 690S Tarot 2 Lite (полетный контроллер Naza V2+GPS) с полезной нагрузка до 1,5 кг. Время автономного полета немодифицированной модели - не более 25 минут. Время эксплуатации устройства, например, в режиме мониторинга района наблюдения вблизи (в пределах радиуса действия около 2 км) линий высокого напряжения 110... 330 кВ без возвращения на базу, ограничено надежностью электронных и электромеханических систем беспилотного летательного аппарата.
Использование изобретения обеспечивает повышение экономичности и увеличение продолжительности времени как автономной, так и полезной работы беспилотного летательного аппарата с несущими винтами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для зарядки БПЛА от провода воздушной линии электропередачи | 2023 |
|
RU2811167C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ КОМПЛЕКС | 2023 |
|
RU2810956C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ФИКСАЦИИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ВЕРТОЛЕТНОГО ТИПА НА ПОСАДОЧНОЙ ПЛОЩАДКЕ БЕЗЭКИПАЖНОГО СУДНА С БЕСКОНТАКТНОЙ ПЕРЕДАЧЕЙ ЭЛЕКТРОЭНЕРГИИ ДЛЯ ЗАРЯДА АККУМУЛЯТОРНЫХ БАТАРЕЙ | 2021 |
|
RU2765726C1 |
| АВТОМАТИЧЕСКИЙ КОМПЛЕКС ДИСТАНЦИОННОЙ ДИАГНОСТИКИ ЭЛЕКТРОСЕТЕВОГО ОБОРУДОВАНИЯ | 2017 |
|
RU2674550C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2023 |
|
RU2801404C1 |
| СИСТЕМА ДОСТАВКИ ГРУЗА | 2018 |
|
RU2689643C1 |
| Беспилотный летательный комплекс | 2024 |
|
RU2836414C1 |
| Мультикоптер с полноповоротным рулем направления, гибридной двигательной установкой и комбинированными винтомоторными группами | 2023 |
|
RU2831361C1 |
| Беспилотный летательный комплекс | 2023 |
|
RU2816399C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2014 |
|
RU2567496C1 |
Изобретение относится к конструкциям беспилотных летательных аппаратов. Беспилотный летательный аппарат содержит несущую раму (1), электродвигатели (2) с несущими винтами (3), укрепленные на консолях (4), электронное оборудование, автономную систему (10) зарядки батареи (9). Система зарядки включает обмотку (11), размещенную на магнитопроводе, выполненном разъемным, состоящим из двух частей. Неподвижная первая часть (12) имеет U-образную форму и установлена над центром масс малогабаритного мультикоптера выше его винтов (3). Вторая часть (13) магнитопровода выполнена в виде подвижного бруска, площадь поперечного сечения которого равна площади поперечного сечения первой части магнитопровода. Обмотка (11) магнитопровода подключена к преобразователю (17) переменного напряжения в постоянное, выход которого подключен к зарядному устройству (18) батареи (9). Немагнитная гибкая лента (19), длина которой равна длине периметра окружности, вписанной в окно (20) магнитопровода, одним концом (21) закреплена внутри окна (20) магнитопровода на втором конце (22) первой части (12) магнитопровода, а второй конец (23) ленты (19) закреплен на втором конце (24) второй части (13) магнитопровода внутри окна (20) магнитопровода. Достигается увеличение продолжительности автономной работы беспилотного летательного аппарата. 1 ил.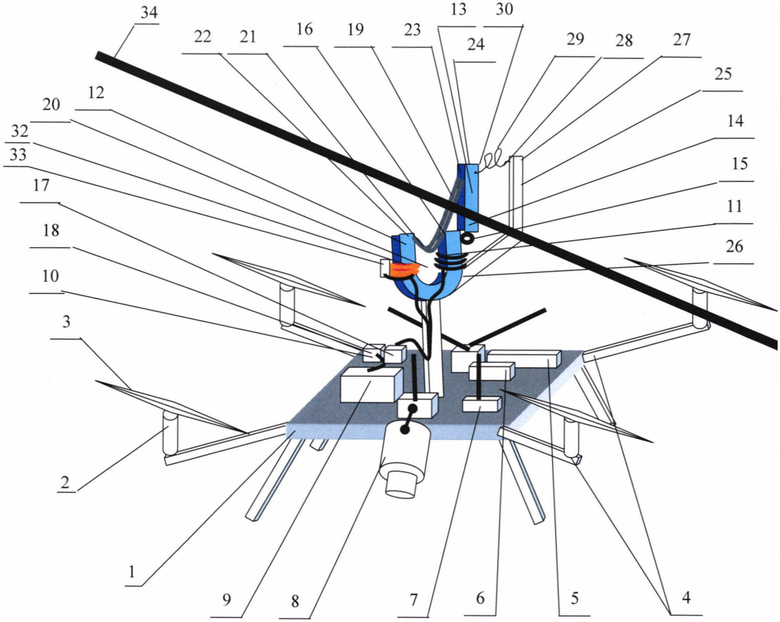
Беспилотный летательный аппарат, содержащий несущую раму, электрические двигатели с несущими винтами, укрепленные на консолях несущей рамы, электронное оборудование, включающее систему автоматического управления, систему цифровой телеметрии и навигации, например спутниковой, системы видеонаблюдения, в том числе и в обеспечение служебных целей, например, за положением летательного аппарата относительно окружающих объектов, аккумуляторную батарею, автономную систему зарядки аккумуляторной батареи, включающую обмотку, размещенную на магнитопроводе, выполненном разъемным, состоящем из двух частей, первая из которых неподвижная, на которой размещена обмотка, имеет U-образную форму и установлена над центром масс малогабаритного мультикоптера выше его несущих винтов, а вторая часть разъемного магнитопровода подвижна, первым концом присоединена с помощью шарнира к первому концу первой части разъемного магнитопровода, а второй ее конец допускает перемещение до замыкания со вторым концом первой части магнитопровода и фиксации взаимного положения частей магнитопровода, обмотка подключена к преобразователю переменного напряжения в постоянное напряжение, выход преобразователя подключен к зарядному устройству аккумуляторной батареи, отличающийся тем, что снабжен немагнитной гибкой лентой, кронштейном из немагнитного материала, пружиной, работающей на растяжение, отрезком медной ленты и управляемым электрическим ключом, торцевые поверхности концов U-образной первой части магнитопровода выполнены ортогональными направлению его средней линии, длина гибкой ленты равна длине периметра окружности, вписанной в окно магнитопровода, один конец немагнитной гибкой ленты закреплен внутри окна магнитопровода на втором конце первой части магнитопровода, а второй конец немагнитной гибкой ленты закреплен на втором конце второй части магнитопровода внутри окна магнитопровода, вторая часть магнитопровода выполнена в виде бруска, площадь поперечного сечения которой равна площади поперечного сечения первой части магнитопровода, кронштейн одним концом прикреплен к внешней поверхности первой части магнитопровода со стороны шарнира, а ко второму его концу присоединен первый конец пружины, второй конец которой прикреплен к внешней поверхности второй части магнитопровода, длина пружины сжатом состоянии определяет ортогональное положение второй части магнитопровода относительно торцевых поверхностей первой части магнитопровода, усилие пружины в растянутом состоянии на 10% выше механического момента, определяемого весом второй части магнитопровода и точкой крепления пружины относительно шарнира, сечение магнитопровода обеспечивает превышение на 10% силы магнитного поля, соединяющей части магнитопровода при рабочей силе тока в фазном проводе, полного веса беспилотного летательного аппарата, отрезок медной ленты образует виток по периметру поперечного сечения первой части магнитопровода, концы отрезка медной ленты соединены управляемым электрическим ключом.
| US 7398946 B1, 15.07.2008 | |||
| US 7714536 B1, 11.05.2010 | |||
| СИСТЕМА ПОДЗАРЯДКИ АККУМУЛЯТОРА ЭЛЕКТРИЧЕСКОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2523420C1 |
| RU 135469 U1, 10.12.2013. | |||

