Изобретение относится к устройству формирования и выдачи оператором команд управления углом поворота винторулевой колонки (далее - ВРК) и оборотами гребного электродвигателя в систему управления ВРК морских судов, где требуется надежность и достоверность формирования команд управления от оператора.
Из уровня техники известна полезная модель «Судовая ручка управления» по патенту РФ 212499 с датой публикации 26.07.2022, относящаяся к области судостроения. Предлагаемая корабельная ручка управления имеет простую конструкцию, позволяющую уменьшить массогабаритные характеристики устройства. Судовая ручка управления полным поворотом, включающая шкалу угла поворота, шкалу скорости движения, втулку, главную передачу управления скоростью, вал управления скоростью, фиксатор нуля, опорное основание, панель, ведомый механизм управления скоростью, потенциометр, крепежную панель потенциометра, вал управления азимутом, соединительную стойку, фиксирующее устройство, первую шестерню управления азимутом, вторую шестерню управления азимутом, вторую соединительную стойку, проводящее контактное кольцо, цифровой кодер, нижнюю пластину, клемму, пару эксцентриковых колес, провод потенциометра. При этом главная передача управления скоростью, вал управления скоростью, потенциометр расположены внутри корпуса судовой ручки управления, вал управления азимутом имеет опору скольжения с резиновым кольцом, фиксирующее устройство расположено непосредственно под панелью.
Из уровня техники известно изобретение «Устройство для измерения угла положения и линейного перемещения контролируемого объекта» по патенту РФ 2780031 с датой публикации 20.09.2022, относящееся к области измерительной техники и предназначено для измерения угловых и линейных перемещений контролируемого объекта с помощью датчиков на основе потенциометра. Устройство может найти применение для измерения угла положения и линейных перемещений подвижных элементов транспортных объектов, кораблей и др. Устройство для измерения угла положения и линейного перемещения контролируемого объекта содержит два идентичных соединенных параллельно между собой канала, основной и резервный, в которых производится формирование стабилизированных напряжений для питания потенциометрического датчика и измерение сигнала, пропорционального угловому положению и линейному перемещению контролируемого объекта; основной и резервный каналы идентичны по своей структуре, каждый из них содержит источник опорного напряжения, к выходу которого подключены вход микросхемы контроллера идеального диода и сток полевого транзистора; сток полевого транзистора подключен к выходу микросхемы контроллера идеального диода; выходы основного и резервного каналов подключены к одному из крайних выводов потенциометрического датчика; затворы полевых транзисторов подключены к выводу микросхемы контроллера идеального диода, который формирует напряжение управления затвором; средний вывод потенциометрического датчика подключен ко входам аналого-цифровых преобразователей, встроенных в микроконтроллеры соответствующих каналов - основного и резервного.
Недостатком данных технических решений является низкая надежность устройств из-за использования контактного потенциометра в качестве датчика угла, поскольку любой контакт снижает отказоустойчивость.
Известно устройство ввода команд по патенту РФ 2679745 с датой публикации 12.02.2019, содержащее привод, в котором установлен диск с рукояткой, механизм фиксации позиций рукоятки с подпружиненным роликом и углублениями под ролик. Устройство содержит тормозные колодки, расположенные внутри диска и упирающиеся в стационарные стенки корпуса самого устройства, три канала датчика угла, где каждый канал состоит из микросхемы с использованием датчиков Холла и магнита, держатель с магнитами закреплен на общей оси диска, при этом микросхемы закреплены на платах датчиков угла, объединенных в трехканальный блок датчиков угла, кроме того, все три канала датчиков угла объединены одной платой модуля контроллера, в состав которой входят три канала контроллера со своими источниками питания, два коммутатора двух выходных линий и два адаптера. Устройство ввода команд может содержать два концевых выключателя, выполненных с функцией дополнительного дублирования кодовой команды.
Наиболее близким техническим решением является устройство ввода команд по патенту РФ 2679751 с датой публикации 12.02.2019. Устройство ввода команд, содержащее два привода, в каждом из которых установлен диск с рукояткой, механизм фиксации позиций рукоятки с подпружиненным роликом и углублениями под ролик. Устройство содержит механизм самовозврата с пружиной кручения, держатель двух магнитов, закрепленный на поворотной оси рукоятки, три канала бесконтактных датчиков угла, где каждый канал состоит из микросхемы с использованием датчиков Холла и магнита, при этом микросхемы с датчиками Холла размещены на платах датчиков угла и объединены в трехканальный блок датчиков угла, причем все три канала датчиков угла каждого привода соединены с одной общей платой модуля контроллера, в состав которого входят три канала контроллера со своими источниками питания, схема мажоритации по двум состояниям из трех, электронные ключи формирования команд. Устройство ввода команд может быть выполнено с трехкратным резервированием по датчикам угла, контроллеру формирования команды, источникам питания.
Недостатком данных технических решений является невозможность применения для управления поворотом винторулевой колонки и оборотами гребного электродвигателя, поскольку данные функции не предусмотрены схемой и конструкцией устройства.
Технической задачей, на решение которой направлено заявляемое изобретение, является создание бесконтактного, резервированного устройства ввода команд, выполняющего функции управления поворотом винторулевой колонки и оборотами гребного электродвигателя.
Техническими результатами, которые достигаются при использовании изобретения, являются совмещение бесконтактного измерения угла поворота рукоятки с конструкцией, позволяющей производить перемещение одной рукоятки в двух степенях свободы с измерением угла в каждом из этих перемещений. А также, двухканальное резервирование как датчиков угла, так и контроллеров схемы измерения с источниками питания, независимая фиксация рукоятки в любом положении для любой степени свободы перемещения в пределах рабочего диапазона.
Дополнительными техническими результатами являются обеспечение возможности управления оператором функционирования заявленного устройства в темное время суток или при малом освещении.
Технические результаты достигаются за счет реализации устройства ввода команд для системы управления винторулевой колонкой, содержащего два независимых привода: привод управления гребным двигателем и привод управления угла поворота винторулевой колонки, объединенные общей рукояткой управления, при этом привод управления гребным двигателем содержит механизм фиксации позиции рукоятки, два канала датчиков угла, где каждый канал состоит из микросхем с датчиком Холла и магнитов, размещенных на двух осях, соединенных рукояткой управления. Механизм фиксации позиций рукоятки с тактильным диском с углублениями, находящимся на общей оси с рукояткой и подпружиненным роликом для фиксации тактильных точек, тормозную колодку, воздействующую на тормозной диск, находящийся на общей оси с рукояткой. Кроме того, привод управления угла поворота винторулевой колонки содержит механизм фиксации позиций корпуса, ось которого перпендикулярна оси рукоятки, с поворотным диском с углублениями, и подпружиненным шариком для фиксации тактильных точек, тормозную колодку, воздействующую на поверхность поворотного диска, две вал-шестерни с магнитами, связанные с рукояткой через стационарную коническую шестерню для передачи вращения от рукоятки на вал-шестерни с магнитами, два канала датчиков угла, где каждый канал состоит из микросхемы с датчиком Холла и магнита.
Каналы датчиков угла привода управления гребным двигателем и привода управления угла поворота винторулевой колонки соединены с общей стационарной платой контроллера через вращающийся контакт, в качестве которого выступает капсульный токоприемник.
Стационарная плата контроллера имеет двухканальное исполнение по контроллеру и встроенным источникам питания.
Устройство ввода команд обеспечивает соосность магнитов и микросхем датчиков угла при двухкратном резервировании, приведенных в одну плоскость их вращения от рукоятки, перемещаемой в двух степенях свободы.
Механизм фиксации позиций рукоятки включает в себя шкалу скорости. Механизм фиксации позиций корпуса включает в себя шкалу угла поворота. Шкала скорости и шкала угла поворота выполнены с подсветкой.
Привод управления гребным двигателем обеспечивает перемещение рукоятки в вертикальной плоскости от начального (нулевого) вертикального положения с наклоном в обе стороны до положения ±60° с фиксацией в любой точке рабочего диапазона без самовозврата. Рукоятка в приводе управления гребным двигателем соединяет две оси с установленными магнитами, механизм фиксации позиций рукоятки, включающий шкалу скорости гребного двигателя, с тактильным диском с углублениями, находящимся на общей оси с рукояткой и подпружиненным роликом для фиксации тактильных точек, тормозную колодку с пружиной сжатия и винтом регулировки тормозного усилия, воздействующую на тормозной диск, находящийся на общей оси с рукояткой.
Привод управления угла поворота винторулевой колонки задает направление перемещения судна и обеспечивает вращение корпуса устройства вместе с рукояткой на 360° в горизонтальной плоскости и в любом направлении без ограничения, и выполнен с независимой фиксацией в любой точке рабочего диапазона. Для привода управления угла поворота винторулевой колонки предусмотрен механизм фиксации позиций корпуса, ось которого перпендикулярна оси рукоятки, с поворотным диском с углублениями, включающим шкалу угла поворота, и подпружиненным шариком для фиксации тактильных точек, тормозную колодку с пружиной сжатия и винтом регулировки тормозного усилия, воздействующую на поверхность поворотного диска, позволяющую обеспечить фиксацию рукоятки и корпуса в любой точке рабочей зоны, коническую зубчатую шестерню для передачи вращения от рукоятки на две вал-шестерни с закрепленными магнитами.
При этом перемещение рукоятки в горизонтальной плоскости не влияет на ее положение в вертикальной плоскости, а перемещение в вертикальной плоскости не влияет на перемещение в горизонтальной плоскости.
Каждый привод содержит по два канала датчиков угла, каждый из которых представляет магнит и микросхему с датчиком Холла, расположенную на платах датчиков угла, которые установлены напротив закрепленных в осях и вал-шестернях магнитов. Платы датчиков угла закреплены на промежуточной плате, с которой данные датчиков угла посредством вращающихся контактов соединены с общей стационарной платой модуля контроллера, в состав которой входят два канала контроллера со своими источниками питания, коммутатор для передачи данных с любого из двух каналов контроллера в линию связи по последовательному каналу RS485, адаптер, который преобразовывает данные от контроллера в вид интерфейса RS485, и выходной разъем для передачи данных в контроллер верхнего уровня системы управления винторулевой колонкой. Система управления винторулевой колонкой имеет возможность опрашивать показания любого канала каждого привода одновременно в одном сеансе обмена.
Устройство ввода команд является бесконтактным за счет использования микросхем с датчиками Холла.
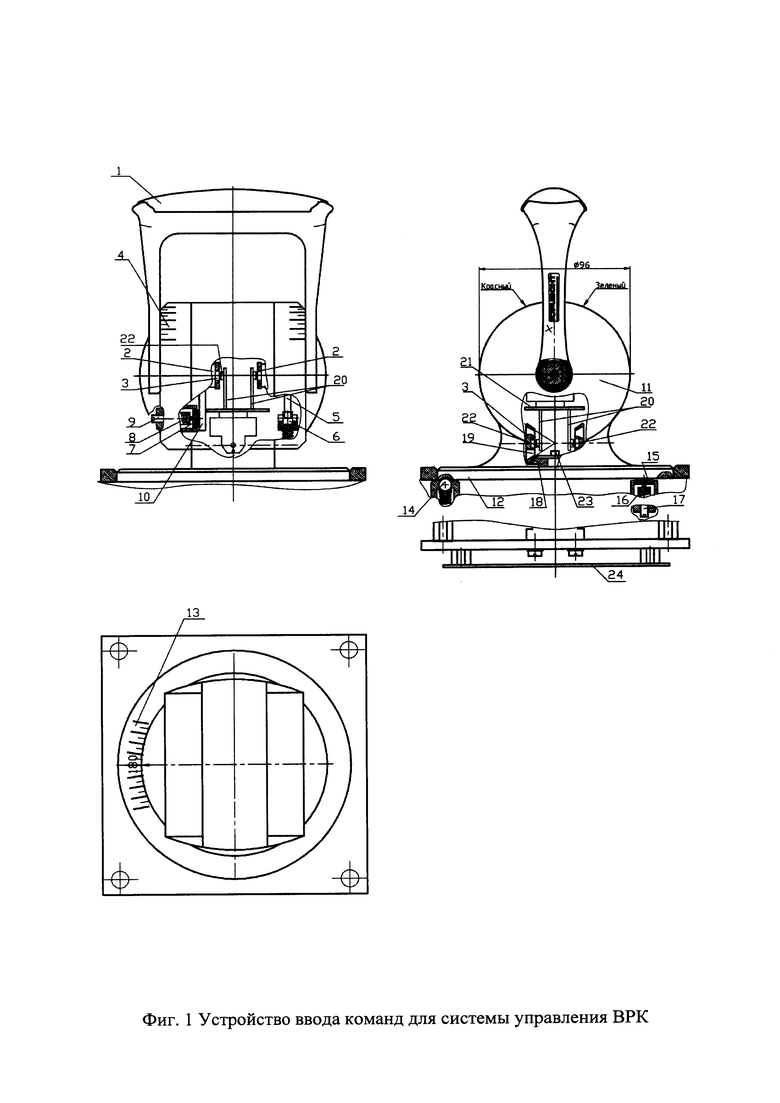
На фиг. 1 приведен общий вид устройства ввода команд для системы управления винторулевой колонкой.
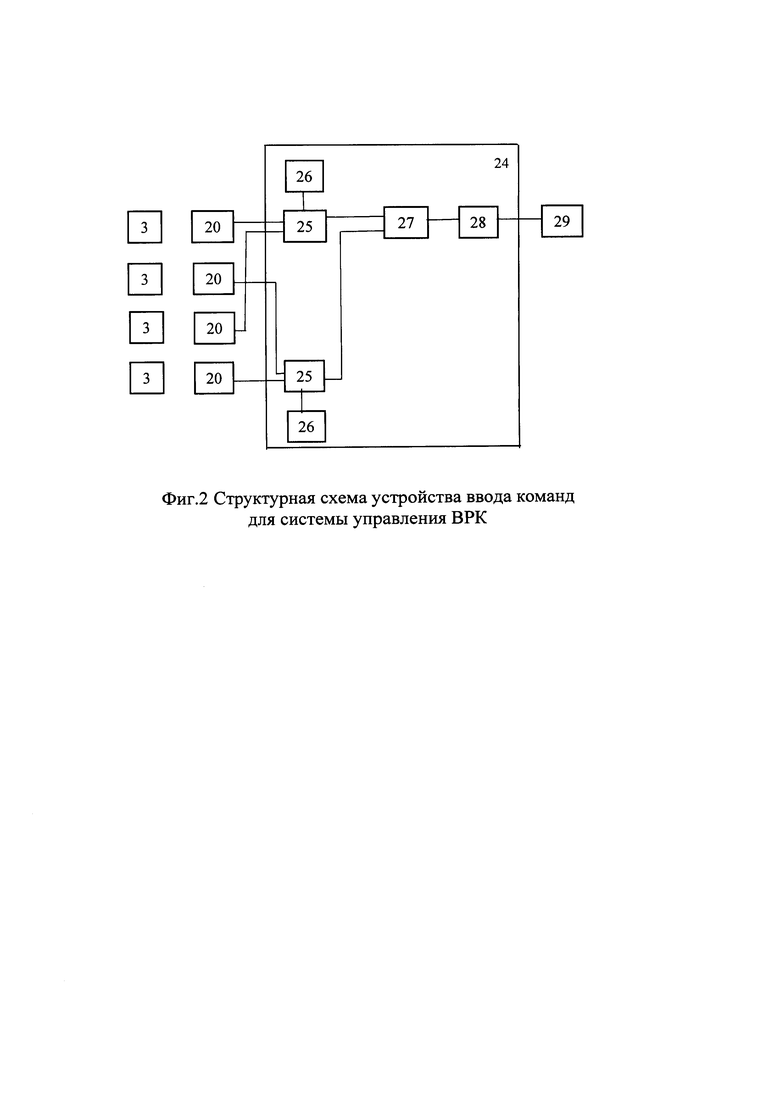
На фиг. 2 приведена структурная схема устройства ввода команд для системы управления винторулевой колонкой.
Устройство ввода команд для системы управления винторулевой колонкой содержит два независимых привода: привод управления гребным двигателем и привод управления угла поворота винторулевой колонки, объединенные общей рукояткой 1, соединяющей две оси 2 с установленными магнитами 3, механизм фиксации позиций рукоятки 1, включающий шкалу скорости 4, с тактильным диском 5 с углублениями, находящимся на общей оси с рукояткой 1 и подпружиненным роликом 6 для фиксации тактильных точек, тормозную колодку 7 с пружиной сжатия 8 и винтом 9 регулировки тормозного усилия, воздействующую на тормозной диск 10, находящийся на общей оси с рукояткой 1, механизм фиксации позиций корпуса 11 с поворотным диском 12 с углублениями, включающим шкалу угла поворота 13, и подпружиненным шариком 14 для фиксации тактильных точек, тормозную колодку 15 с пружиной сжатия 16 и винтом 17 регулировки тормозного усилия, воздействующую на поверхность поворотного диска 12, что позволяет обеспечить фиксацию рукоятки 1 и корпуса 11 в любой точке рабочей зоны, коническую зубчатую шестерню 18 для передачи вращения от рукоятки 1 на две вал-шестерни 19 с закрепленными магнитами 3, установленными в стенках корпуса 11.
Каждый привод в устройстве ввода команд содержит по два канала датчиков угла 20, состоящих из плат с микросхемами 22 и датчиками Холла, установленных напротив закрепленных в осях 2 и вал-шестернях 19 магнитов 3, по одному магниту на каждый канал. Платы датчиков угла 20, установленные на общей плате 21, посредством вращающихся контактов 23 соединены с общей платой 24 модуля контроллера, в состав которого входят два канала контроллера 25 со своими источниками питания 26, коммутатор 27 для передачи данных с любого из двух каналов контроллера в линию связи по последовательному каналу RS485, адаптер 28, который преобразовывает данные от контроллера в вид интерфейса RS485, и выходной разъем 29 для передачи данных в контроллер верхнего уровня системы управления винторулевой колонкой.
Заявляемое устройство ввода команд системы управления ВРК работает следующим образом.
Задание угла поворота ВРК обеспечивается поворотом рукоятки 1 с корпусом вокруг вертикальной оси на 360° в горизонтальной плоскости и в любом направлении без ограничения с независимой фиксацией в любой точке рабочего диапазона и контрольными тактильными точками через каждые 90°.
Задание частоты оборотов и направления вращения гребного электродвигателя обеспечивается перемещением рукоятки 1 в вертикальной плоскости от начального (нулевого) вертикального положения с наклоном в обе стороны до положения ±60° с фиксацией в любой точке рабочего диапазона без самовозврата и контрольными тактильными точками в точке «0» и крайних точках, ограничивающих угол наклона.
Таким образом, реализуется перемещение одной рукоятки в двух степенях свободы с измерением угла в каждом из этих перемещений.
При перемещении рукоятки 1 в вертикальной плоскости с фиксацией в любой точке рабочего диапазона, обеспечиваемой тактильным диском 5 и подпружиненным роликом 6, а также тормозной колодкой 7 с регулируемым тормозным усилием, воздействующим на тормозной диск 10, происходит поворот осей 2 привода управления гребным двигателем с закрепленными на них магнитами 3 относительно двух каналов плат датчиков угла 20, состоящих из микросхем 22 с датчиками Холла, установленных на стационарно закрепленной плате 21, которые непрерывно производят измерение угла поворота магнитов 3 относительно нулевого положения, при котором производилась юстировка устройства ввода команд при настройке.
При повороте рукоятки 1 вокруг вертикальной оси поворотный диск 12 с закрепленным на нем корпусом 11 поворачиваются на подшипниковой опоре вокруг стационарной оси с установленной на ней конической шестерней 18 в любое фиксированное положение, обеспечиваемое тормозной колодкой 15 с регулируемым тормозным усилием, воздействующим на плоскость поворотного диска 12 и контрольными тактильными точками с подпружиненным шариком 14 и углублениями для его фиксации на диске 12, вместе с тем происходит вращение вал-шестерен 19, установленных в стенках корпуса 11, с закрепленными магнитами 3 относительно стационарно установленных на общей плате 21 двух каналов плат датчиков угла 20 с магнитами 3 и микросхемами 22 с датчиками Холла, которые непрерывно производят измерение угла поворота магнитов 3 относительно нулевого положения, при котором производилась юстировка устройства ввода команд при настройке.
В процессе юстировки платы контроллера 24 для привода управления гребным двигателем каждый канал контроллера опрашивает платы датчиков угла 20 своего канала от привода управления гребным двигателем при установке рукоятки 1 в контрольных точках рабочего диапазона: +60°, 0°, -60° и записывает в память контроллера значения углов, соответствующих этим контрольным точкам.
В процессе юстировки платы контроллера 24 для привода управления угла поворота винторулевой колонки каждый канал контроллера опрашивает платы датчиков угла 20 своего канала от привода управления угла поворота винторулевой колонки при установке рукоятки 1 в контрольных точках рабочего диапазона: 0°, 90°, 180°, 270°, и записывает в память контроллера значения углов, соответствующих этим контрольным точкам.
В рабочем режиме каждый из двух каналов контроллера 25 платы 24 непрерывно циклически и последовательно опрашивает платы датчиков угла 20 своего канала от привода управления гребным двигателем и привода управления угла поворота винторулевой колонки, производит масштабирование значений измеренных углов, вычисляет значения, соответствующие измеренному углу в соответствии с согласованным протоколом, формирует команды управления в виде пакета данных для передачи на верхний уровень системы управления как для управления частотой оборотов и направлением вращения гребного электродвигателя, так и для угла поворота винторулевой колонки. Коммутатор 27 выбирает канал, с которого передается сформированная команда через адаптер 28 который преобразует сформированную контроллером команду управления в вид интерфейса RS485 для передачи через выходной разъем 29 на верхний уровень системы управления винторулевой колонкой.
Система управления винторулевой колонкой имеет возможность опрашивать показания любого канала каждого привода одновременно в одном сеансе обмена, что повышает надежность устройства.
При отпускании рукоятки 1, последняя фиксируется в любой точке рабочей зоны за счет узлов торможения, состоящих из тормозных колодок 7 и 15 и пружин 8 и 16.
Таким образом, заявляемое устройство ввода команд обеспечивает выполнение функций управления поворотом винторулевой колонки и оборотами гребного электродвигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство ввода команд для системы управления подруливающим устройством | 2023 |
|
RU2802096C1 |
| Устройство ввода команд | 2018 |
|
RU2679745C1 |
| Устройство ввода команд для системы управления экскаватором | 2023 |
|
RU2809499C1 |
| Устройство ввода команд | 2018 |
|
RU2679751C1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2022 |
|
RU2788226C1 |
| ПОЛЬЗОВАТЕЛЬСКИЙ ИНТЕРФЕЙС ДЛЯ УПРАВЛЕНИЯ ВАННОЙ С ВИХРЕВЫМ ГИДРОМАССАЖЕМ | 2004 |
|
RU2334264C2 |
| КОНТРОЛЛЕР КИСТИ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2716353C1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2023 |
|
RU2808302C1 |
| КОНТРОЛЛЕР ЗАПЯСТЬЯ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2718568C1 |
| КОНТРОЛЛЕР | 2005 |
|
RU2286898C1 |
Изобретение относится к устройству формирования и выдачи оператором команд управления углом поворота винторулевой колонки и оборотами гребного электродвигателя. Устройство ввода команд для системы управления винторулевой колонкой содержит два независимых привода: привод управления гребным двигателем и привод управления угла поворота винторулевой колонки, объединенные общей рукояткой управления. Привод управления гребным двигателем содержит механизм фиксации позиции рукоятки, два канала датчиков угла, где каждый канал состоит из магнита и микросхемы с датчиком Холла, размещенными на двух осях, соединенных рукояткой управления. Механизм фиксации позиций рукоятки с тактильным диском с углублениями, находящимся на общей оси с рукояткой и подпружиненным роликом для фиксации тактильных точек, тормозную колодку, воздействующую на тормозной диск, находящийся на общей оси с рукояткой. Привод управления угла поворота винторулевой колонки содержит механизм фиксации позиций корпуса, ось которого перпендикулярна оси рукоятки, с поворотным диском с углублениями, и подпружиненным шариком для фиксации тактильных точек, тормозную колодку, воздействующую на поверхность поворотного диска, две вал- шестерни с магнитами, связанные с рукояткой через стационарную коническую шестерню для передачи вращения от рукоятки на вал-шестерни с магнитами, два канала датчиков угла, где каждый канал состоит из магнита и микросхемы с датчиком Холла. Достигается совмещение бесконтактного измерения угла поворота рукоятки с конструкцией, позволяющей производить перемещение одной рукоятки в двух степенях свободы с измерением угла в каждом из этих перемещений, а также, двухканальное резервирование как датчиков угла, так и контроллеров схемы измерения с источниками питания, независимая фиксация рукоятки в любом положении для любой степени свободы перемещения в пределах рабочего диапазона. 7 з.п. ф-лы, 2 ил.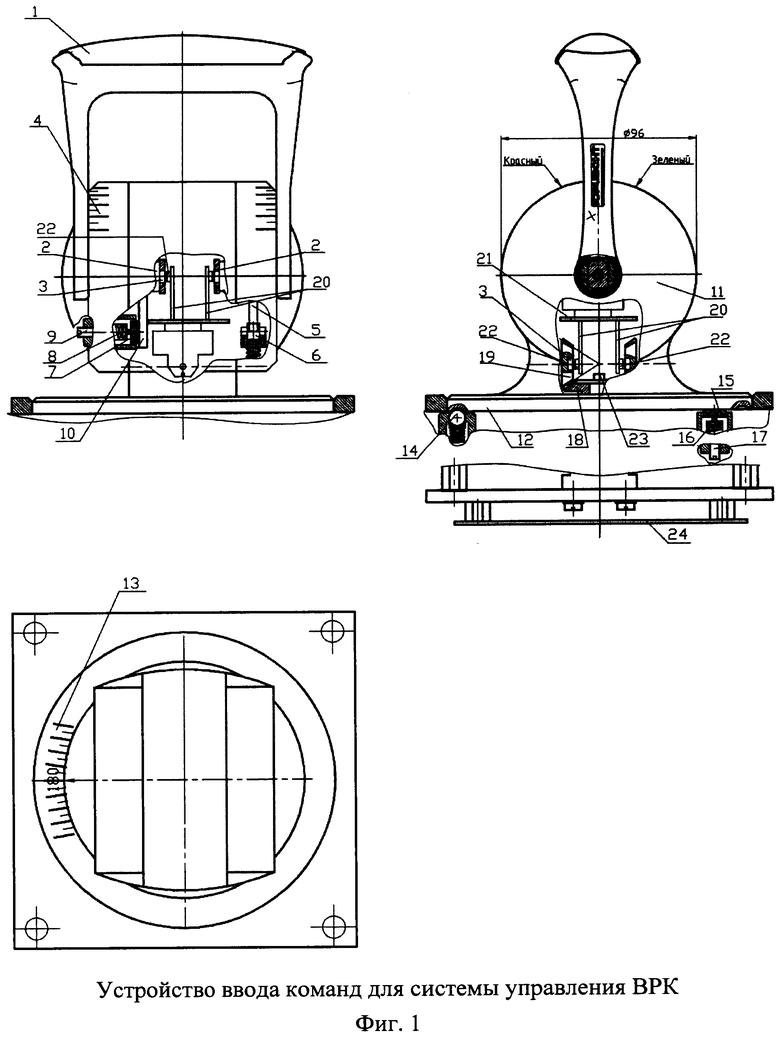
1. Устройство ввода команд для системы управления винторулевой колонкой, содержащее два независимых привода: привод управления гребным двигателем и привод управления угла поворота винторулевой колонки, объединенные общей рукояткой управления, при этом привод управления гребным двигателем содержит механизм фиксации позиции рукоятки, два канала датчиков угла, где каждый канал состоит из микросхем с датчиком Холла и магнитами, размещенными на двух осях соединенных рукояткой управления, отличающееся тем, что механизм фиксации позиций рукоятки с тактильным диском с углублениями, находящимся на общей оси с рукояткой и подпружиненным роликом для фиксации тактильных точек, тормозную колодку, воздействующую на тормозной диск, находящийся на общей оси с рукояткой, кроме того привод управления угла поворота винторулевой колонки содержит механизм фиксации позиций корпуса, ось которого перпендикулярна оси рукоятки, с поворотным диском с углублениями, и подпружиненным шариком для фиксации тактильных точек, тормозную колодку, воздействующую на поверхность поворотного диска, две вал-шестерни с магнитами, связанные с рукояткой через стационарную коническую шестерню для передачи вращения от рукоятки на вал-шестерни с магнитами, два канала датчиков угла, где каждый канал состоит из магнита и микросхемы с датчиком Холла.
2. Устройство ввода команд по п.1, отличающееся тем, что каналы датчиков угла привода управления гребным двигателем и привода управления угла поворота винторулевой колонки соединены с общей стационарной платой контроллера через вращающийся контакт, в качестве которого выступает капсульный токоприемник.
3. Устройство ввода команд по п.2, отличающееся тем, что стационарная плата контроллера имеет двухканальное исполнение по контроллеру и встроенным источником питания.
4. Устройство ввода команд по п.1, отличающееся тем, что обеспечивает соосность магнитов и микросхем датчиков угла при двухкратном резервировании, приведенных в одну плоскость их вращения от рукоятки, перемещаемой в двух степенях свободы.
5. Устройство ввода команд по п.1, отличающееся тем, что механизм фиксации позиций рукоятки включает в себя шкалу скорости.
6. Устройство ввода команд по п.1, отличающееся тем, что механизм фиксации позиций корпуса включает в себя шкалу угла поворота.
7. Устройство ввода команд по п.1, отличающееся тем, что шкала скорости выполнена с подсветкой.
8. Устройство ввода команд по п.1, отличающееся тем, что шкала угла поворота выполнена с подсветкой.
| Устройство ввода команд | 2018 |
|
RU2679751C1 |
| ГИДРАВЛИЧЕСКОЕ РУЛЕВОЕ УСТРОЙСТВО ДЛЯ ВИНТОРУЛЕВОЙ КОЛОНКИ МОРСКОГО СУДНА | 2011 |
|
RU2560940C1 |
| DE 19648417 A1, 28.05.1998 | |||
| KR 1020140022277 A, 24.02.2014 | |||
| ПРИВОДНАЯ СИСТЕМА ГРЕБНОГО ВИНТА НАДВОДНОГО СУДНА И СПОСОБ ОБЕСПЕЧЕНИЯ ДВИЖЕНИЯ И УПРАВЛЕНИЯ ПО КУРСУ | 1999 |
|
RU2234439C2 |

