Область техники
Изобретение относится к области летных испытаний авиационной техники, а именно, к предварительным летным испытаниям беспилотных летательных аппаратов (БЛА) самолетного типа.
Уровень техники
В целях сокращения сроков, повышения эффективности, снижения объемов и стоимости летных испытаний, а также обеспечения безопасности их проведения испытания авиационной техники целесообразно начинать с предварительных летных испытаний.
Известен патент КНР №109229421А «Система и способ исследования динамических характеристик беспилотных летательных аппаратов», опубликован 18.01.2019, в котором предлагается система и способ проведения испытаний для определения динамических характеристик БЛА. Система включает в себя цилиндрическую неподвижную платформу, кронштейн, датчики давления, подвижную платформу с установленным на ней многороторным БЛА, хомут из нержавеющей стали для крепления БЛА к платформе, электродвигатель, модуль питания БЛА, датчики температуры и скорости, датчики напряжения и тока, главный компьютер. Система и способ проведения испытаний позволяют измерять подъемную силу, крутящий момент, возникающие при подъеме или снижении БЛА, тангаже и крене, и одновременно получать результаты испытаний различных параметров полета. Через модуль беспроводной передачи данные с датчиков передаются и регистрируются в режиме реального времени главным компьютером для последующего анализа динамических характеристик БЛА. Однако, данная система предназначена для испытаний БЛА только многороторного типа.
Также известен патент РФ «Стенд для аэродинамических испытаний сверхлегких летательных аппаратов» №2092804, опубликован 10.10.1997. Данный стенд содержит мачту с системами крепления объекта испытаний и задания угла атаки, установленными на транспортном средстве на базе тяжелого автомобиля с кунгом, датчики усилий и регистратор сигналов. Дополнительно установлен аэродинамический экран в виде откидной площадки, шарнирно закрепленной впереди над транспортным средством посредством стоек и раскосов и связанной блочно-тросовой системой с лебедкой. Установленный аэродинамический экран позволяет изолировать возмущенный автомобилем поток воздуха.
Недостатком использования данного стенда аэродинамических испытаний является сложность и габариты конструкции. В приведенном патенте в качестве объекта испытаний представлен только дельтаплан. При проведении испытаний других видов летательных аппаратов на стенде потребуется внесение изменений в их конструкцию и (или) конструкцию стенда. Предлагаемый в патенте стенд создается для конкретного буксирующего автомобиля (в патенте приведен тяжелый автомобиль с кунгом ГАЗ-66), что также ограничивает его применение. Использование стенда сводится к задаче исследования аэродинамических, прочностных характеристик и статических испытаний сверхлегких летательных аппаратов (при снятии его с автомобиля и установке на пол стенда для статических испытаний).
Известен патент ЕПВ №2902320 В1 «Способ и устройство взлета беспилотного летательного аппарата», опубликован 14.04.2021, в котором предлагается способ и устройство для запуска беспилотных летательных аппаратов с неподвижным крылом. Данный способ запуска включает в себя устройство для взлета БЛА (на земле или с поверхности воды), трос для буксировки БЛА, закрепленный на устройстве. БЛА размещается на устройстве запуска между двумя стенками устройства и фиксируется. Устройство с закрепленным на нем БЛА, предпочтительнее в положении «нос вниз», приводится в движение лебедочной системой до достижения или превышения скорости взлета БЛА. При достижении этой скорости летательный аппарат может естественным образом оторваться от устройства взлета. Часть буксирного троса является упругой для того, чтобы уменьшить влияние начального натяжения троса и снизить вероятность его обрыва.
В описании данного патента приведены два способа крепления БЛА на устройство взлета: с помощью фиксации кронштейном задней кромки крыла БЛА или при помощи доработки фюзеляжа БЛА цилиндрическими выступами с полусферическими концами, которые соприкасаются с направляющими, закрепленными вертикально на внутренней поверхности тележки. Применение первого из способов крепления БЛА на устройство взлета может привести к повреждению БЛА, а применение второго способа требует модификации фюзеляжа БЛА. Устройство взлета разрабатывается для конкретного аппарата, и применение его для другой категории БЛА потребует не просто его доработки, а изготовления нового.
Предлагаемое изобретение направлено на достижение технического результата, заключающегося в расширении арсенала технических средств для проведения предварительных летных испытаний БЛА самолетного типа, а также в повышении безопасности проведения испытаний БЛА за счет особенностей конструкции составных частей системы и контролирования хода проведения испытаний.
Для достижения указанного технического результата предлагается система для проведения предварительных летных испытаний беспилотных летательных аппаратов (БЛА) самолетного типа, содержащая толкающее устройство, измерительно-вычислительное устройство, опорную платформу с ходовой частью, отличающаяся тем, что опорная платформа выполнена в виде рамочной конструкции, соединенной с толкающим устройством узлом крепления; при этом на рамочную конструкцию установлен блок подвески, включающий в себя вертикальные направляющие, обеспечивающие возможность линейного движения БЛА перпендикулярно строительной плоскости платформы в диапазоне высот, соответствующих размерам испытываемого БЛА, ограничительные планки, предотвращающие выход БЛА за пределы безопасной зоны, и шарнирный узел, обеспечивающий вращение БЛА относительно трех основных осей; в шарнирном узле закреплено устройство сопряжения, состоящее из разборных колец, охватывающих фюзеляж БЛА, и шпилек, соединяющих кольца между собой, при этом размер и количество колец определяется категорией БЛА; кроме того, на рамочной конструкции установлены пневмоподушки, предотвращающие повреждение поверхностей БЛА; дополнительно в систему для проведения предварительных летных испытаний БЛА самолетного типа введено измерительно-вычислительное устройство, содержащее блок датчиков, устанавливаемых на БЛА, и вычислительный блок с системой сбора, обработки, регистрации данных от датчиков, передачи и отображения информации в реальном масштабе времени на блок управления, установленный на толкающем устройстве, для выдачи рекомендаций на изменение параметров движения БЛА путем воздействия на органы управления БЛА и изменения скорости толкающего устройства; в качестве толкающего устройства может использоваться произвольное транспортное средство, соответствующее категории испытываемого БЛА.
Краткое описание чертежей
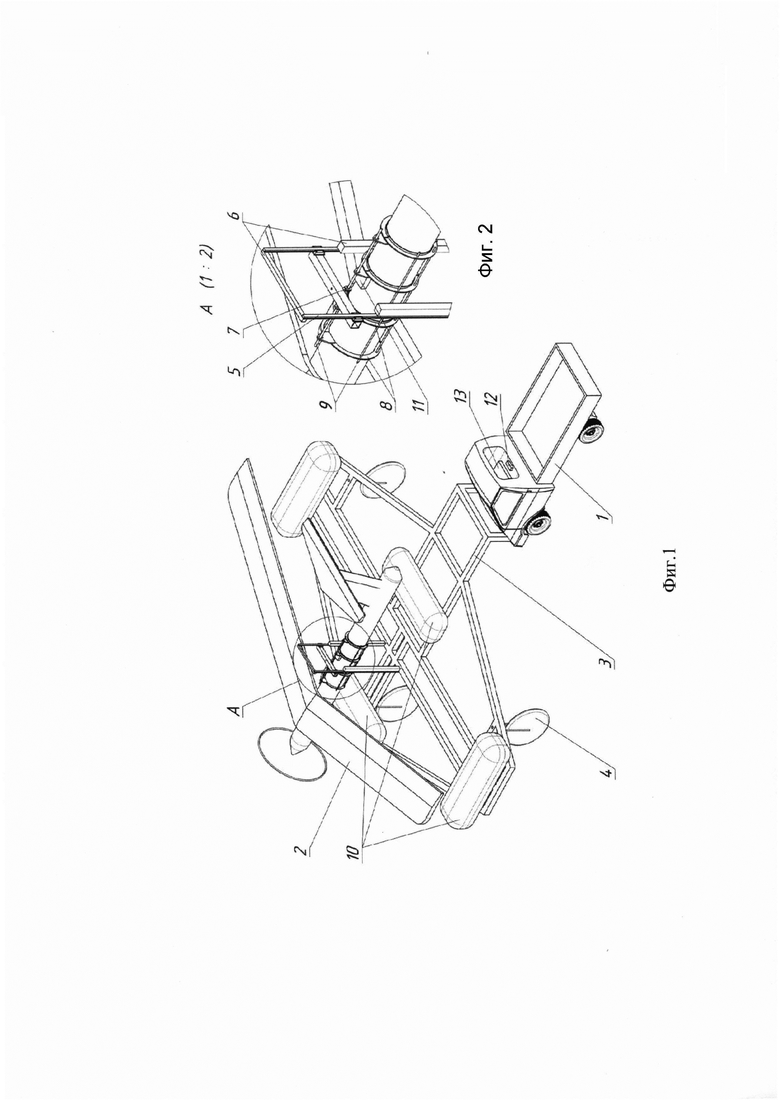
На фиг. 1 приведен общий вид системы для проведения предварительных летных испытаний беспилотных летательных аппаратов, а на фиг. 2 - увеличенное изображение А фрагмента системы, где:
1 - толкающее устройство,
2 - беспилотный летательный аппарат,
3 - рамочная конструкция,
4 - колесные опоры,
5 - вертикальные направляющие блока подвески,
6 - ограничительные планки блока подвески,
7 - шарнирный узел блока подвески,
8 - разборные кольца устройства сопряжения,
9 - шпильки,
10 - пневмоподушки,
11 - блок датчиков,
12 - вычислительный блок,
13 - блок управления.
В качестве толкающего устройства 1 может использоваться транспортное средство, вид (тип) которого зависит от размера и веса испытуемого БЛА 2 (фиг. 1).
Опорная платформа представляет собой рамочную конструкцию 3 на колесных опорах 4 в виде жесткой ферменной конструкции, соединенной с толкающим устройством 1 узлом крепления (не показан). На рамочную конструкцию 3 установлен блок подвески, включающий в себя вертикальные направляющие 5, которые дают возможность линейного движения БЛА 2 перпендикулярно строительной плоскости платформы в диапазоне высот, зависящих от размеров испытываемого БЛА 2, ограничительные планки 6, которые предотвращают выход БЛА 2 за пределы безопасной зоны, и шарнирный узел 7, обеспечивающий вращение БЛА 2 относительно трех основных осей (фиг. 2). В шарнирном узле 7 (фиг. 2) закреплено устройство сопряжения, состоящее из разборных колец 8, охватывающих фюзеляж БЛА 2, и шпилек 9, соединяющих кольца 8 между собой, при этом размер и количество колец 8 определяется категорией БЛА 2. На рамочной конструкции 3 установлены пневмоподушки 10 (фиг. 1), которые позволяют при взаимодействии с поверхностями БЛА 2 не повреждать его конструкцию.
Измерительно-вычислительное устройство состоит из блока датчиков 11, устанавливаемых на БЛА 2, и вычислительного блока 12 для сбора, обработки, регистрации данных от датчиков, передачи и отображения информации в реальном масштабе времени на блок управления 13, который находится на толкающем устройстве 1 и выдает рекомендации на изменение параметров движения БЛА 2 путем воздействия на органы управления БЛА 2 и изменения скорости толкающего устройства 1 (фиг. 1).
Система работает следующим образом. Для минимизации влияния собственных движений опорной платформы на БЛА испытания проводятся на ровном участке дороги или ВПП аэродрома.
БЛА 2 самолетного типа устанавливается на рамочную конструкцию 3 системы с применением образующих устройство сопряжения колец 8 и шпилек 9, закрепляемых в шарнирном узле 7 блока подвески. Приводимая в движение толкающим устройством 1 система для проведения предварительных летных испытаний БЛА выполняет пробежки с поэтапным и постепенным увеличением скорости вплоть до скорости подъема носового колеса БЛА 2. При этом направляющие 5 и ограничительные планки 6 блока подвески предотвращают выход БЛА 2 за пределы безопасной зоны в процессе движения системы. Во время работы системы блоки 11, 12 измерительно-вычислительного устройства осуществляют контроль за выполнением каждого этапа испытаний.
В процессе испытаний с использованием блока управления 13 система позволяет провести проверку и отладку информационного комплекса БЛА, каналов командного радиоуправления и телеметрии, а при включенном двигателе БЛА - получение подтверждения срабатывания автономных бортовых и внешних средств принудительного прекращения движения БЛА на планируемых дальностях проведения испытаний. Также система позволяет провести проверку выключения двигателя по таймеру в стационарных условиях, проверку включения и отработку каналов стабилизации тангажа, крена, высоты и исследование аэродинамических характеристик испытуемого БЛА.
Пример осуществления изобретения для БЛА самолетного типа весом до 100 кг.
Для данной категории БЛА толкающим устройством может быть выбран грузовой автомобиль марки «Газель». Опорная платформа представляет собой сварную рамочную конструкцию и может изготавливаться из квадратной трубы. В качестве колесных опор могут быть использованы амортизационные колеса для роликов, велосипедов, тележек и т.д. Для реализации прямолинейного перемещения БЛА (вертикальные направляющие) может применяться система линейного перемещения (система скольжения), в которой по рельсовым направляющим перемещается каретка. На каретку закрепляется планка с шарнирным узлом, состоящим из шарнирной головки (самоцентрирующийся подшипник скольжения, который использует сферическое внутреннее кольцо). Устройство сопряжения может состоять из шпилек и выточенных из алюминиевого прутка колец диаметром, соответствующим размеру испытуемого БЛА. В качестве подушек безопасности могут быть использованы надувные баллоны из ПВХ цилиндрической формы. Блок датчиков может измерять такие параметры полета, которые характеризуют угловое движение БЛА, как углы тангажа, крена, рыскания и их угловые скорости. При этом выходной измерительный сигнал с датчиков после подачи на вход вычислительного блока с помощью АЦП преобразуется в цифровой код, что дает возможность обработки измерительной информации в режиме реального времени с последующим отображением ее на мониторе блока управления.
Таким образом, предлагаемая система для проведения предварительных летных испытаний беспилотных летательных аппаратов позволяет реализовать практически натурные условия для проведения испытаний БЛА при обеспечении контроля и безопасности исследуемого объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2008 |
|
RU2380286C1 |
| Способ полунатурных роботизированных исследований и испытаний систем управления беспилотных воздушных судов вертикального взлета и посадки (БВС ВВП) | 2021 |
|
RU2771692C1 |
| ВОЗВРАЩАЕМЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ТРЕХОПОРНЫМ ШАССИ | 2008 |
|
RU2408500C2 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1995 |
|
RU2133210C1 |
| Беспилотный летательный аппарат - перехватчик | 2018 |
|
RU2669904C1 |
| Беспилотный летательный аппарат самолетного типа для обнаружения пропавшего человека | 2019 |
|
RU2723201C1 |
| Трансформируемый беспилотный летательный аппарат | 2018 |
|
RU2688506C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ПАРАШЮТНОЙ СИСТЕМОЙ ПОСАДКИ | 2020 |
|
RU2754278C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2009 |
|
RU2409504C1 |
| МОДУЛЬНАЯ КОНСТРУКЦИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2017 |
|
RU2681423C1 |
Изобретение относится к области летных испытаний авиационной техники, а именно к предварительным летным испытаниям беспилотных летательных аппаратов (БЛА) самолетного типа. Система для проведения предварительных летных испытаний беспилотных летательных аппаратов (БЛА) самолетного типа содержит толкающее устройство, измерительно-вычислительное устройство с блоком датчиков, опорную платформу с ходовой частью и вычислительный блок. Опорная платформа выполнена в виде рамочной конструкции, соединенной с толкающим устройством узлом крепления. При этом на рамочную конструкцию установлен блок подвески. Блок подвески включает в себя вертикальные направляющие, ограничительные планки и шарнирный узел. В шарнирном узле закреплено устройство сопряжения, состоящее из разборных колец, охватывающих фюзеляж БЛА, и шпилек, соединяющих кольца между собой. На рамочной конструкции установлены пневмоподушки, предотвращающие повреждение поверхностей БЛА. Вычислительный блок содержит систему сбора, обработки, регистрации данных от датчиков, передачи и отображения информации в реальном масштабе времени на блок управления, установленный на толкающем устройстве. 2 ил.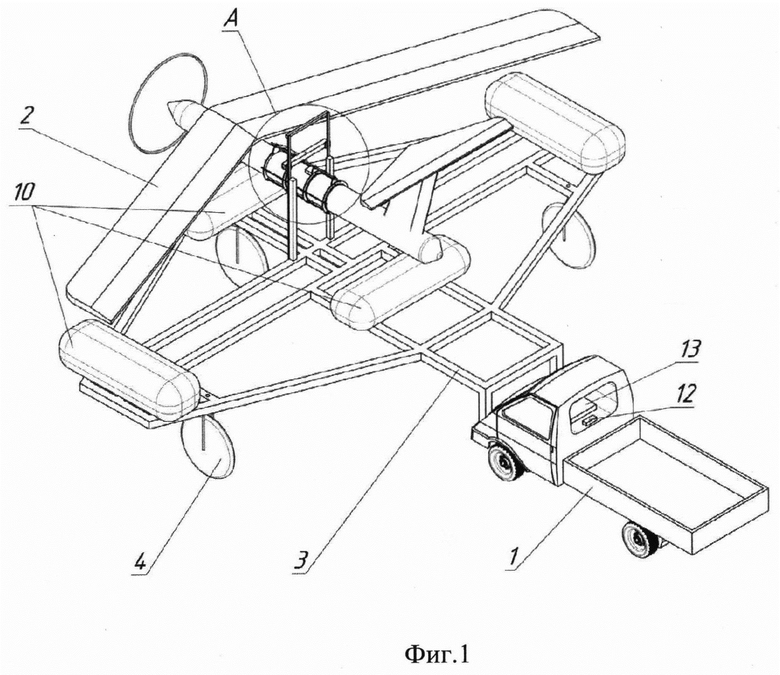
Система для проведения предварительных летных испытаний беспилотных летательных аппаратов (БЛА) самолетного типа, содержащая: толкающее устройство, измерительно-вычислительное устройство, опорную платформу с ходовой частью, отличающаяся тем, что опорная платформа выполнена в виде рамочной конструкции, соединенной с толкающим устройством узлом крепления; при этом на рамочную конструкцию установлен блок подвески, включающий в себя вертикальные направляющие, обеспечивающие возможность линейного движения БЛА перпендикулярно строительной плоскости платформы в диапазоне высот, соответствующих размерам испытываемого БЛА, ограничительные планки, предотвращающие выход БЛА за пределы безопасной зоны, и шарнирный узел, обеспечивающий вращение БЛА относительно трех основных осей; в шарнирном узле закреплено устройство сопряжения, состоящее из разборных колец, охватывающих фюзеляж БЛА, и шпилек, соединяющих кольца между собой, при этом размер и количество колец определяется категорией БЛА; кроме того, на рамочной конструкции установлены пневмоподушки, предотвращающие повреждение поверхностей БЛА; дополнительно в систему для проведения предварительных летных испытаний БЛА самолетного типа введено измерительно-вычислительное устройство, содержащее блок датчиков, устанавливаемых на БЛА, и вычислительный блок с системой сбора, обработки, регистрации данных от датчиков, передачи и отображения информации в реальном масштабе времени на блок управления, установленный на толкающем устройстве, для выдачи рекомендаций на изменение параметров движения БЛА путем воздействия на органы управления БЛА и изменения скорости толкающего устройства; в качестве толкающего устройства может использоваться произвольное транспортное средство, соответствующее категории испытываемого БЛА.
| EP 2902320 B1, 14.04.2021 | |||
| Способ экспериментальных исследований аэромеханики и динамики полёта беспилотных летательных аппаратов и устройство для его осуществления | 2021 |
|
RU2767584C1 |
| CN 108622437 A, 09.10.2018 | |||
| ПУСКОВАЯ УСТАНОВКА ДЛЯ ЗАПУСКА БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2617096C1 |

