Изобретение относится к антенным устройствам с механическим сканированием и может быть использовано на подвижных объектах.
Известные «Антенное устройство» (патент РФ №2592053, МПК H01R, 3/00, опубл. 20.07.2016), «Антенное устройство с бикардановым подвесом» (патент РФ №2613344, МПК F41G, 7/22, опубл. 16.03.2017) являются устройствами с усовершенствованным механизмом вращения (С.С. Ривкин. Стабилизация измерительных устройств на качающемся основании. М. «Наука», 1978 г., стр. 197-198) и представляют собой сочетание двух кардановых подвесов. Первый из них состоит из внешней рамки, внутренней рамки и стабилизируемой площадки. Механизм вращения состоит из двигателей, которые поворачивают рамки подвеса. Второй карданов подвес состоит из бугеля и вилки. Бугель играет роль внешней рамки второго подвеса, а вилка - роль его внутренней рамки. Все указанные устройства имеют общий недостаток - они работают только в режиме периодического изменения направления вращения двигателей, что не позволяет реализовать режим скоростного сканирования, при котором двигатели вращаются непрерывно с частотами, близкими к предельным.
Наиболее близким по технической сущности является «Антенное устройство» (авторское свидетельство SU №1810941 А1, МПК Н01Q 3/08, опублик. 23.04.93). В указанном устройстве электродвигатель, вращающийся с постоянной частотой, через зубчатые колеса передает движение валу азимутального вращения и валу привода качания, имеющим общую ось вращения. На торце вала привода качания расположен эксцентрик, который взаимодействует с кареткой, установленной на полом валу азимутального вращения с возможностью возвратно-поступательного перемещения в плоскости, перпендикулярной общей оси валов. Каретка снабжена зубчатой рейкой, взаимодействующей с зубчатым сектором, который жестко соединен с отражателем антенны. Закон сканирования данного устройства определяется разницей частот вращения валов азимутального вращения и привода качания, которая задается коэффициентами передачи зубчатых колес. Недостатком данной конструкции является то, что закон сканирования задается механически - за счет зубчатых передач, без возможности изменения его в процессе работы. Кроме того, подвижный отражатель при работе устройства вращается вокруг своей оси, что делает невозможным построение антенны с поворотом плоскости поляризации.
Техническим результатом предложенного технического решения является возможность обзора области цели с высокой скоростью по спиральному закону с возможностью управления траекторией движения сканирующего луча в процессе работы, а также расширение области применения за счет возможности построения антенны с поворотом плоскости поляризации.
Технический результат достигается тем, что антенное устройство с электромеханическим приводом, включающим электродвигатель, полые вал азимутального вращения и вал угломестного вращения, установленные соосно, основание, жестко связанное с валом азимутального вращения, эксцентрик, установленный в торце вала угломестного вращения, каретку, расположенную на основании с возможностью линейного перемещения относительно основания под действием эксцентрика, подвес отражателя, установленный на основании с возможностью вращения вокруг оси закрепления под действием каретки, содержит подвижный отражатель, облучатель, установленный в центре полых валов, корпус, установленный на корпусе радиопрозрачный кожух, на котором находится неподвижный отражатель. В устройство введен второй электродвигатель, при этом один из них связан кинематически с валом азимутального вращения, а второй - с валом угломестного вращения с возможностью независимого управления обоими электродвигателями. Кроме того на подвес посредством подшипника установлен держатель с закрепленным на нем с возможностью вращения вокруг оси закрепления кронштейном, имеющим зубчатые секторы, связанные кинематически с шестернями, закрепленными на корпусе, при этом подвижный отражатель жестко установлен на держателе.
Сущность предлагаемого технического решения поясняется следующими фигурами.
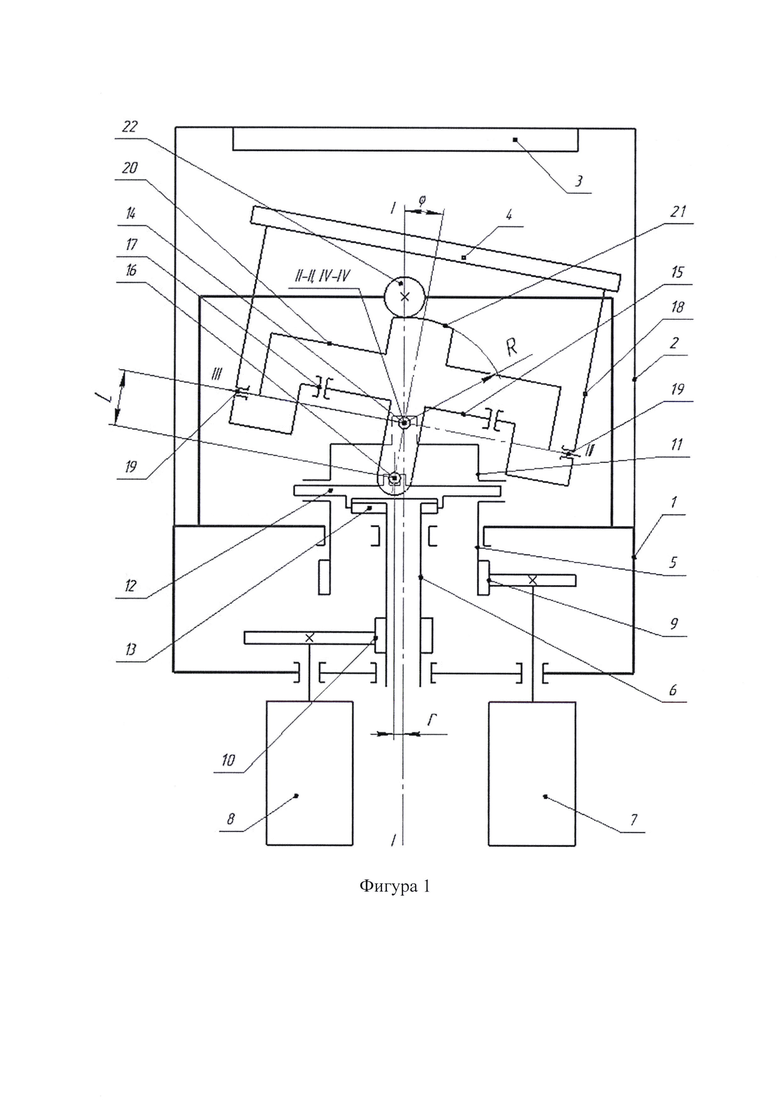
На фигуре 1 приведена кинематическая схема антенного устройства.
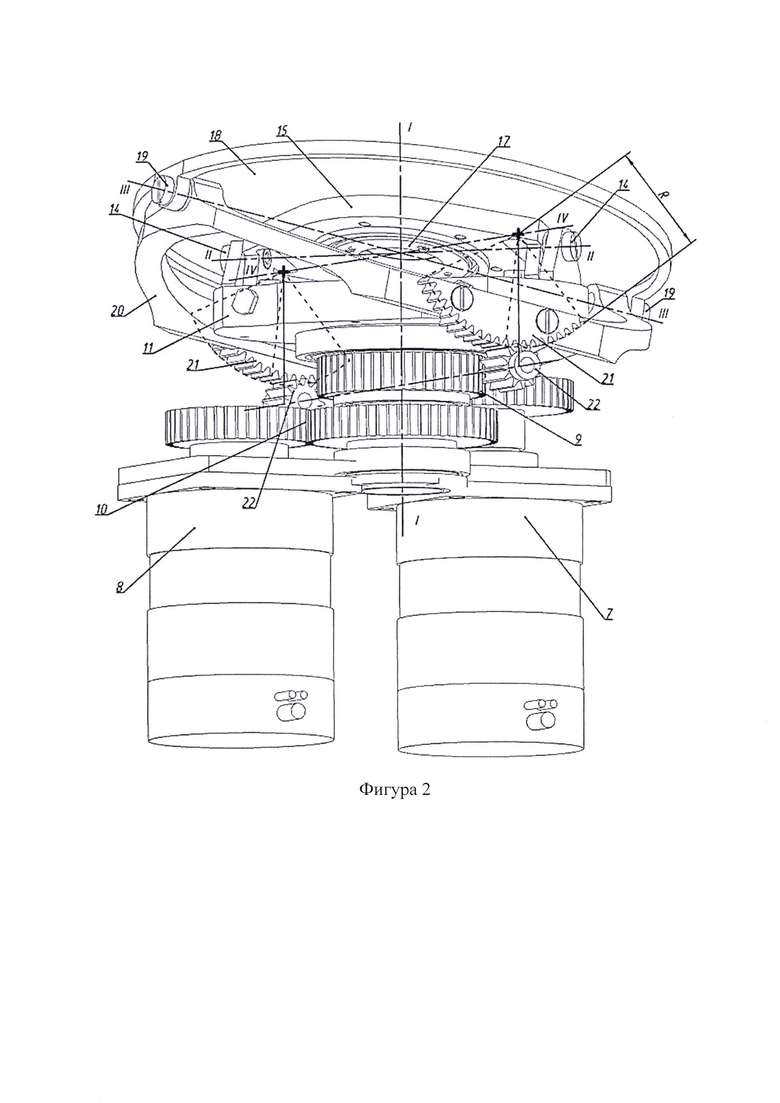
На фигуре 2 приведен внешний вид электромеханического привода.
На фигуре 3 приведено сечение электромеханического привода.
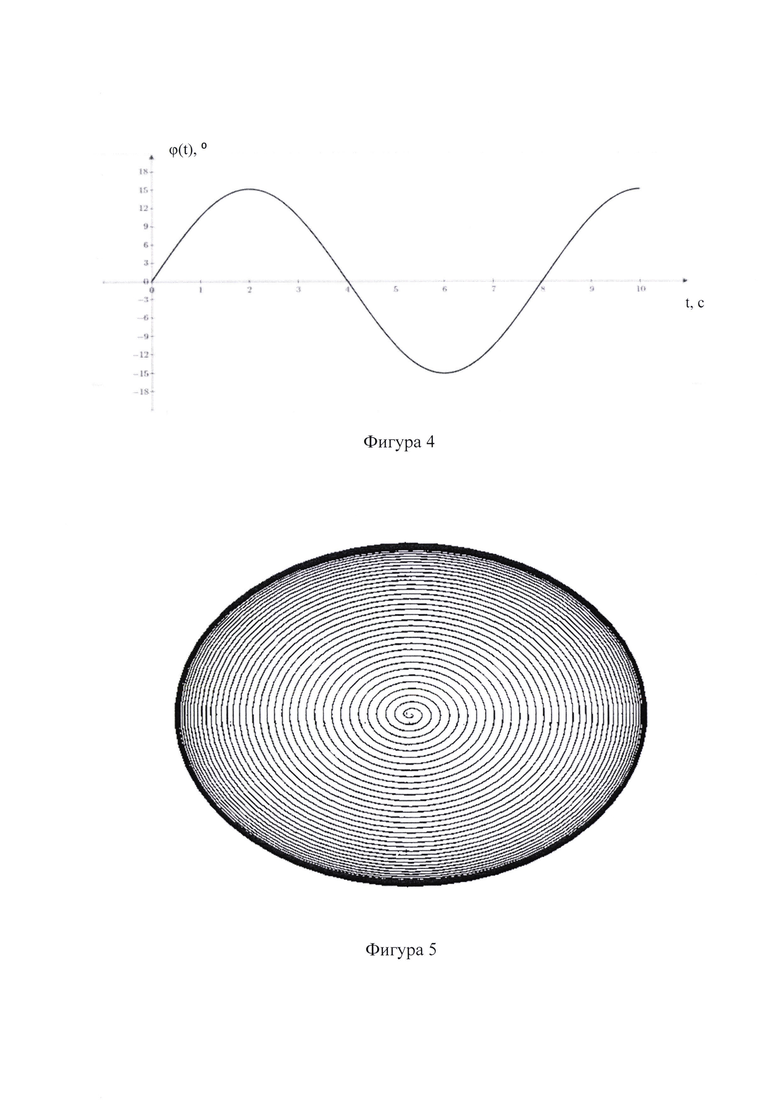
На фигуре 4 показано изменение угла места при равномерном вращении вала угло-местного вращения относительно вала азимутального вращения.
На фигуре 5 показана линия пересечения нормали подвижного отражателя и плоскости, перпендикулярной строительной оси устройства за время получения полного кадра.
Антенное устройство (фиг. 1) включает корпус 1, на который установлен радиопрозрачный кожух 2 с неподвижным отражателем 3, облучатель, электромеханический привод и подвижный отражатель 4.
Электромеханический привод (фиг. 1, фиг. 2, фиг. 3), включает полые вал азимутального вращения 5 и вал угломестного вращения 6, расположенные соосно в корпусе 1, вращающиеся вокруг строительной оси устройства I-I и приводимые в движение двумя двигателями: вал 5 - двигателем 7; вал 6 - двигателем 8 через зубчатые передачи 9 и 10 соответственно. В центре полых валов азимутального и угломестного вращения установлен облучатель антенны (на фигурах не показан).
Основание 11 жестко связано с валом азимутального вращения 5. Каретка 12 расположена на основании 11 с возможностью линейного перемещения относительно основания в плоскости, перпендикулярной строительной оси устройства. Эксцентрик 13, установленный в торце вала привода угломестного вращения 6, при вращении относительно основания 11 приводит к возвратно-поступательным движениям каретки 12. На основании 11 посредством штырей 14 также установлен подвес 15, который под действием каретки 12 наклоняется вокруг оси закрепления II-II, перпендикулярной строительной оси устройства I-I, при этом ось II-II вращается вокруг оси I-I вместе с основанием. На подвесе 15 на расстоянии L от его оси крепления установлены штифты 16, которые находятся в пазах каретки 12. Таким образом, линейные перемещения каретки 12 приводят к наклону подвеса 15 относительно основания 11 (вокруг оси II-II). Максимальный угол наклона подвеса ϕ определяется расстоянием r между центрами эксцентрика 13 и расстоянием L.
При работе устройства основание 11 с подвесом 15 вращаются вокруг строительной оси устройства I-I. Для обеспечения возможности построения антенны с поворотом плоскости поляризации необходимо ограничить вращение подвижного отражателя вокруг своей оси. Для этого на подвес 15 через подшипник 17 установлен держатель 18, на котором посредством штырей 19 установлен кронштейн 20, способный свободно вращаться вокруг оси закрепления относительно держателя (вокруг оси III-III). Кронштейн 20 имеет зубчатые секторы 21, взаимодействующие с шестернями 22, установленными на корпусе 1. Центры зубчатых секторов 21 находятся на линии IV-IV, параллельной оси установки шестерней 22 и проходящей через точку пересечения строительной оси устройства I-I и оси II-II крепления подвеса 15 и основания 11. При работе устройства подвижный отражатель 4, установленный на держателе 18, будет наклоняться вокруг оси III-III относительно кронштейна 20, а также наклоняться вокруг оси IV-IV совместно с кронштейном 20, при этом ось IV-IV остается неподвижной относительно корпуса 1, а ось III-III вращается вокруг оси IV-IV в плоскости, перпендикулярной оси IV-IV и проходящей через точку пересечения осей I-I и IV-IV.
Устройство работает следующим образом.
Поворот отражателя по азимуту (вокруг оси I-I) осуществляется синхронным вращением валов 5 и 6, приводимых в движение двигателями 7 и 8 через зубчатые передачи 9 и 10. При этом эксцентрик 13 не будет перемещать каретку 12, а подвес 15 будет вращаться вокруг оси I-I без изменения значения угла ϕ. Таким образом можно обеспечить поворот антенны на заданный угол по азимуту (угол α) или реализовать высокоскоростной обзор пространства по круговому закону (если двигатели будут вращаться с равными постоянными частотами, близкими к предельно допустимым).
Поворот отражателя по углу места осуществляется поворотом вала 6 относительно вала 5. Если частоты вращения валов 5 и 6 будут постоянными, но различными, эксцентрик 13 будет перемещать каретку 12 относительно основания 11 по гармоническому закону в диапазоне расстояний от -r до г от строительной оси. Угол места будет изменяться по формуле:
где α1(t) -угол между эксцентриком и основанием.
Если вал 6 будет вращаться с постоянной частотой, а вал 5 будет неподвижен, то подвес 15 будет совершать колебания вокруг оси II-II, как показано на фиг. 4. Если валы 5 и 6 будут вращаться с постоянными, но разными частотами, близкими к предельно допустимым, устройство будет обеспечивать высокоскоростной обзор области цели по спиральному закону. По результатам кинематического расчета предлагаемого устройства была получена линия пересечения нормали подвижного отражателя и плоскости, перпендикулярной строительной оси устройства за время получения полного кадра (фиг. 5). Разница между частотами вращения валов 5 и 6 должна рассчитываться по формуле:
где ТК - время получения полного кадра или время изменения угла места от нуля до максимального значения (или наоборот).
Количество витков спирали будет определяться выражением:
где Та - период вращения вала 5.
Таким образом, предлагаемое устройство позволяет обеспечить обзор области цели с высокой скоростью по спиральному закону с возможностью управления траекторией движения сканирующего луча в процессе работы за счет использования второго электродвигателя, а установка на подвес с помощью подшипника держателя с кронштейном, имеющим зубчатые секторы, кинематически связаные с шестернями корпуса, ограничивает вращение держателя вокруг строительной оси устройства, что позволяет построить антенну с поворотом плоскости поляризации.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ЭЛЕКТРОМАГНИТНОГО АРРЕТИРОВАНИЯ АНТЕННЫ БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2014 |
|
RU2564636C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ АНТЕННЫ ПО АЗИМУТУ И УГЛУ МЕСТА | 1990 |
|
RU2020666C1 |
| АНТЕННОЕ УСТРОЙСТВО | 2007 |
|
RU2334316C1 |
| КРУПНОГАБАРИТНАЯ ПЕРЕВОЗИМАЯ АНТЕННА | 1996 |
|
RU2169969C2 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО | 2008 |
|
RU2359372C1 |
| Антенное устройство | 1991 |
|
SU1810941A1 |
| АЗИМУТАЛЬНО-УГЛОМЕСТНАЯ АНТЕННАЯ УСТАНОВКА С ЧЕТЫРЕХЗЕРКАЛЬНЫМ ЛУЧЕВОДОМ | 1995 |
|
RU2094916C1 |
| АНТЕННОЕ УСТРОЙСТВО | 1990 |
|
RU2054216C1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО (ЕГО ВАРИАНТЫ) | 1991 |
|
RU2134003C1 |
| Двухзеркальная антенна с механическим нацеливанием | 2017 |
|
RU2665495C1 |

Изобретение относится к антенным устройствам с механическим сканированием и может быть использовано на подвижных объектах. В антенном устройстве с электромеханическим приводом валы азимутального и угломестного вращения расположенные соосно, приводятся в движение разными двигателями независимо друг от друга. На основании, жестко связанном с валом азимутального вращения, расположена каретка, совершающая возвратно-поступательные движения под действием эксцентрика, установленного в торце вала угломестного вращения. На основании установлен подвес с возможностью вращения вокруг оси закрепления под действием каретки. На подвес посредством подшипника установлен держатель с закрепленным на нем с возможностью вращения вокруг оси закрепления кронштейном, имеющим зубчатые секторы, взаимодействующие с шестернями, закрепленными на корпусе, при этом подвижный отражатель жестко установлен на держателе. Техническим результатом заявленного технического решения является возможность обзора области цели с высокой скоростью по спиральному закону с возможностью управления траекторией движения сканирующего луча в процессе работы, а также расширение области применения за счет возможности построения антенны с поворотом плоскости поляризации. 5 ил.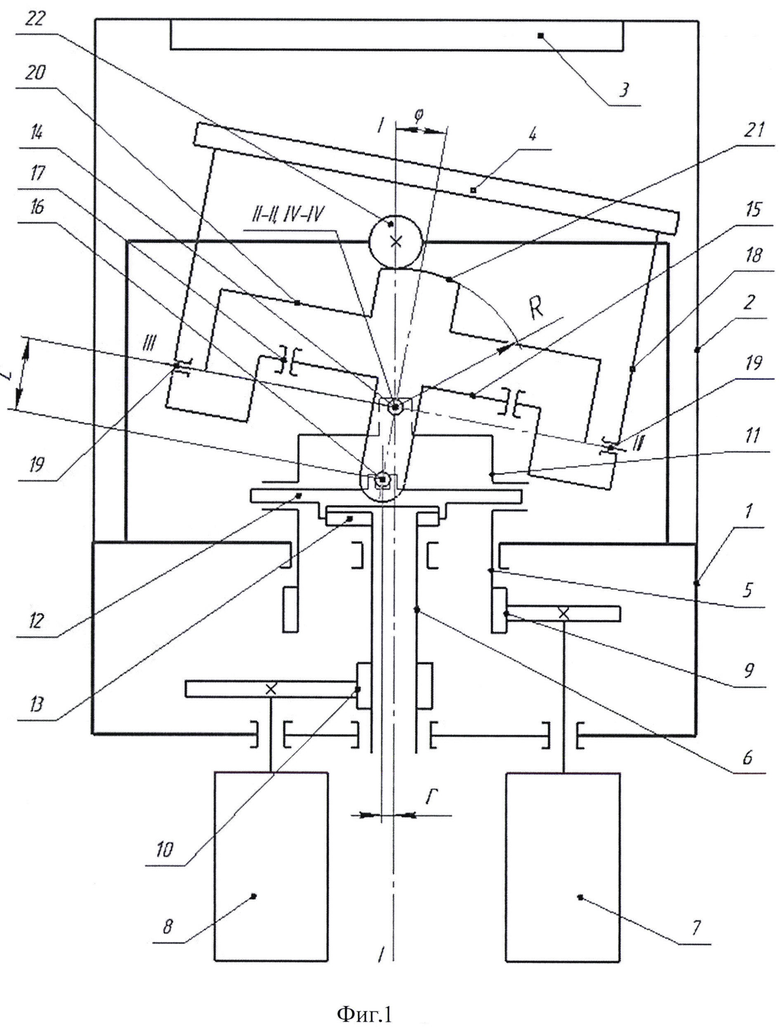
Антенное устройство с электромеханическим приводом, включающим электродвигатель, полые вал азимутального вращения и вал угломестного вращения, установленные соосно, основание, жестко связанное с валом азимутального вращения, эксцентрик, установленный в торце вала угломестного вращения, каретку, расположенную на основании с возможностью линейного перемещения относительно основания под действием эксцентрика, подвес отражателя, установленный на основании с возможностью вращения вокруг оси закрепления под действием каретки, содержит подвижный отражатель, облучатель, установленный в центре полых валов, корпус, установленный на корпусе радиопрозрачный кожух, на котором находится неподвижный отражатель, отличающееся тем, что в устройство введен второй электродвигатель, при этом один электродвигатель связан кинематически с валом азимутального вращения, а второй - с валом угломестного вращения с возможностью независимого управления обоими электродвигателями, кроме того, на подвес посредством подшипника установлен держатель с закрепленным на нем с возможностью вращения вокруг оси закрепления кронштейном, имеющим зубчатые секторы, связанные кинематически с шестернями, закрепленными на корпусе, при этом подвижный отражатель жестко установлен на держателе.
| Антенное устройство | 1991 |
|
SU1810941A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В НАПРЯЖЕНИЕ | 1983 |
|
SU1840567A1 |
| Привод антенного устройства | 1977 |
|
SU628567A1 |
| АНТЕННОЕ УСТРОЙСТВО | 2015 |
|
RU2592053C1 |
| Поворотное устройство антенны | 1984 |
|
SU1218433A1 |
| Способ получения термореактивных лаков | 1949 |
|
SU77731A1 |
| CN 202871980 U, 10.04.2013. | |||

