Изобретение относится к области радиолокации и может быть использовано для однозначного определения радиальной скорости объектов, перемещающихся по различным типам траекторий.
Известны способы определения радиальной скорости движения объекта, основанные на использовании эффекта Доплера. Сущность этих способов заключается в том, что с помощью линейки узкополосных фильтров измеряют доплеровское смещение частоты принимаемых колебаний FA, а затем вычисляют радиальную скорость объекта по формуле:  где λ - длина волны излучаемых колебаний РЛС [1, С. 238-239; 2, С. 128-129]
где λ - длина волны излучаемых колебаний РЛС [1, С. 238-239; 2, С. 128-129]
Недостаток способов: неоднозначность определения радиальной скорости. Величина максимальной однозначно измеряемой радиальной скорости зависит от частоты повторения (следования) Fп зондирующих импульсов и длины волны λ излучаемых колебаний:  [2, С. 297-298]. За пределами интервала
[2, С. 297-298]. За пределами интервала  радиальная скорость измеряется неоднозначно.
радиальная скорость измеряется неоднозначно.
Наиболее близким аналогом, то есть прототипом, является способ определения радиальной скорости путем оптимального взвешенного суммирования фиксированной выборки из N измеренных значений дальности [3, рис.4.7, С. 303].
Сущность способа-прототипа поясняется структурной схемой устройства определения радиальной скорости, приведенной в фиг. 1.
Устройство определения радиальной скорости способом-прототипом содержит последовательно соединенные цифровой нерекурсивный фильтр (ЦНРФ, блок 1) оценивания первого приращения, состоящий из последовательно соединенных запоминающего устройства (ЗУ блок 1.1), содержащего (N-1) устройств задержки на период обзора T0, блока реализации весовой функции (блок 1.2), содержащего блок весовых коэффициентов и умножители, сумматора (блок 1.3), а также вычислитель радиальной скорости (блок 2), являющийся выходом устройства.
В РЛС через одинаковые интервалы времени, равные периоду обзора Т0, измеряют дальность до объекта и преобразуют результаты измерений в цифровые сигналы, которые подают на вход запоминающего устройства ЦНРФ. На выходе ЗУ формируется фиксированная выборка из N сигналов дальности ri, которую подают на вход блока реализации весовой функции (блок 1.2). В блоке 1.2 фиксированную выборку сигналов дальности ri умножают на весовые коэффициенты оценивания первого приращения, поступающие из блока весовых коэффициентов. При этом в блоке весовых коэффициентов по нижеприведенным формулам вычисляют весовые коэффициенты оценивания первого приращения сигнала дальности в следующих точках траектории:
- в начале интервала сглаживания (в начале фиксированной выборки)

- в середине интервала сглаживания

- в конце интервала сглаживания

где i - порядковый номер координаты в фиксированной выборке.
В итоге на выходе блока реализации весовой функции получают три фиксированные взвешенные выборки сигналов дальности, которые подают на вход сумматора
В сумматоре производят суммирование взвешенных сигналов дальности и определяют оценки первых приращений дальности:
- в начале интервала сглаживания 
- в середине интервала сглаживания 
- в конце интервала сглаживания 
В вычислителе радиальной скорости (блок 2) определяют оценки радиальной скорости объекта путем деления оценок первых приращений дальности на период обзора Т0:
- в начале интервала сглаживания 
- в середине интервала сглаживания 
- в конце интервала сглаживания 
Достоинство способа-прототипа: обеспечивается однозначное определение радиальной скорости объектов, перемещающихся по различным типам траекторий.
Недостаток способа-прототипа: появляются динамические ошибки определения радиальной скорости, то есть смещение оценок радиальной скорости, в том числе на линейной траектории. При этом динамические ошибки существенно возрастают, если радиальную скорость оценивают в конце и в начале интервала сглаживания.
Техническим результатом заявленного изобретения является устранение смещения оценок радиальной скорости па линейной траектории и устранение неоднозначности определения радиальной скорости.
Для достижения заявленного технического результата оценивание радиальной скорости осуществляют по фиксированной выборке квадратов дальности.
Сущность заявленного способа поясняется схемой устройства определения радиальной скорости по выборке квадратов дальности, приведенной в фиг. 2. В отличие от устройства-прототипа, приведенного в фиг. 1, в схему дополнительно введен умножитель измерений дальности ri×ri (блок 3), а на третий вход вычислителя радиальной скорости (блок 2) подают результаты измерений дальности до объекта в начале r1, в середине rcp и в конце rN интервала сглаживания.
В заявленном способе так же, как в способе - прототипе, в РЛС через одинаковые интервалы времени, равные периоду обзора Т0, измеряют дальность до объекта и преобразуют результаты измерений в цифровые сигналы. Далее формируют фиксированную выборку из N сигналов, умножают эти сигналы на весовые коэффициенты  вычисленные по формулам (1)-(3), и получают три фиксированные выборки взвешенных сигналов. Затем суммируют эти фиксированные выборки взвешенных сигналов и получают оценки первых приращений сигналов в начале, в середине и в конце интервала сглаживания, которые делят на период обзора Т0.
вычисленные по формулам (1)-(3), и получают три фиксированные выборки взвешенных сигналов. Затем суммируют эти фиксированные выборки взвешенных сигналов и получают оценки первых приращений сигналов в начале, в середине и в конце интервала сглаживания, которые делят на период обзора Т0.
В отличие от прототипа, согласно заявленному изобретению, используют цифровые сигналы квадратов дальности, для этого в каждом обзоре перемножают измеренные значения дальности ri и получают квадраты дальности  которые преобразуют в цифровые сигналы. Далее формируют фиксированную выборку квадратов дальности
которые преобразуют в цифровые сигналы. Далее формируют фиксированную выборку квадратов дальности  умножают их на весовые коэффициенты
умножают их на весовые коэффициенты  и получают три фиксированные выборки взвешенных сигналов квадратов дальности. Полученные после суммирования трех фиксированных выборок взвешенных сигналов квадратов дальности оценки первого приращения квадрата дальности в начале
и получают три фиксированные выборки взвешенных сигналов квадратов дальности. Полученные после суммирования трех фиксированных выборок взвешенных сигналов квадратов дальности оценки первого приращения квадрата дальности в начале  в середине
в середине  и в конце
и в конце  интервала сглаживания дополнительно делят на удвоенные значения дальности до объекта в начале r1, в середине rcp и в конце rN интервала сглаживания. В итоге оценивают радиальные скорости объекта в начале
интервала сглаживания дополнительно делят на удвоенные значения дальности до объекта в начале r1, в середине rcp и в конце rN интервала сглаживания. В итоге оценивают радиальные скорости объекта в начале  в середине
в середине  и в конце
и в конце  интервала сглаживания.
интервала сглаживания.
Для доказательства реализуемости заявленного технического результата оценим радиальные скорости объекта, перемещающегося по линейной траектории, схема которой приведена в фиг. 3.
В фиг. 3 использованы следующие условные обозначения:
AF - линейная траектория (пунктирная линия);
АС - интервал сглаживания;
Р=OD - курсовой параметр (траверзное расстояние) - минимальное удаление объекта от РЛС, находящейся в начале системы координат XOY;
OD - линия траверза;
V - скорость объекта;
Q - курс объекта;
ri - наклонная дальность до объекта;
 - радиальная скорость объекта;
- радиальная скорость объекта;
qi - курсовой угол между векторами скорости и радиальной скорости;
 - удаления объекта в начале, в середине и в конце интервала сглаживания от траверза.
- удаления объекта в начале, в середине и в конце интервала сглаживания от траверза.
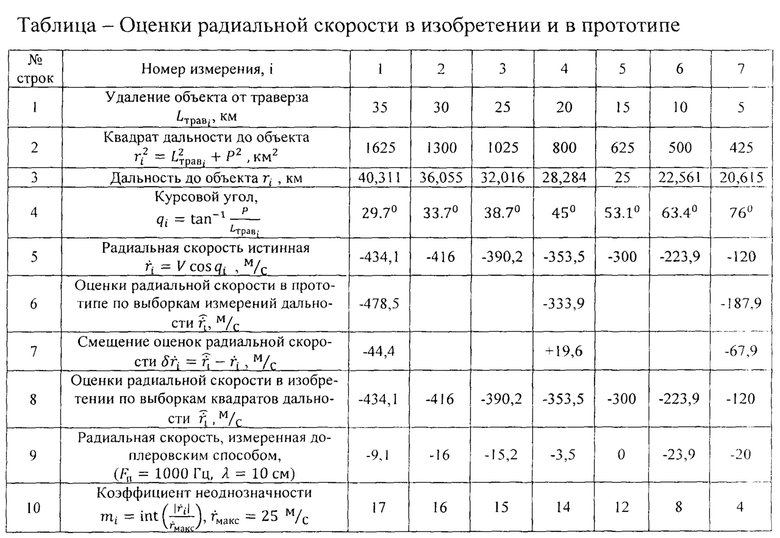
Объект перемещается с постоянной скоростью  с произвольным неизменным курсом Q, на постоянной высоте и с курсовым параметром Р=20 км относительно неподвижной РЛС. Измерения дальности производятся с темпом, равным периоду обзора Т0 - 10 с, на интервале сглаживания АС длиной 30 км, то есть фиксированная выборка содержит 7 измерений дальности (N=7). Начало интервала сглаживания находится на удалении 35 км
с произвольным неизменным курсом Q, на постоянной высоте и с курсовым параметром Р=20 км относительно неподвижной РЛС. Измерения дальности производятся с темпом, равным периоду обзора Т0 - 10 с, на интервале сглаживания АС длиной 30 км, то есть фиксированная выборка содержит 7 измерений дальности (N=7). Начало интервала сглаживания находится на удалении 35 км  середина - 20 км
середина - 20 км  и конец - 5 км
и конец - 5 км  от траверза (точка D).
от траверза (точка D).
Как видно из фиг. 3, радиальные скорости отрицательны до траверза, так как объекты приближаются к РЛС, и положительны после траверза (после точки Е), так как объекты удаляются от РЛС.
Значения дальности до объекта и его радиальной скорости, а также смещений оценок радиальной скорости в разных точках интервала сглаживания приведены в таблице.
В строках 6 и 7 таблицы приведены значения оценок радиальной скорости и их смещений, полученные в прототипе в начале (1-й столбец), в середине (4-й столбец) и в конце (7-й столбец) интервала сглаживания.
Оценки вычислялись по следующей методике. Формулы (2), (5) и (8) для прототипа в середине интервала сглаживания при семи измерениях приводятся к виду:

В итоге имеем положительное смещение оценки в прототипе  В предлагаемом изобретении смещение устраняется:
В предлагаемом изобретении смещение устраняется:

Аналогично формулы (3), (6) и (9) для прототипа в конце интервала сглаживания при семи измерениях приводятся к виду:

В итоге имеем отрицательное смещение оценки в прототипе

В предлагаемом изобретении смещение оценки в конце интервала сглаживания также устраняется:

Аналогичные результаты получены в начале интервала сглаживания.
Характер изменения величины смещения оценок радиальной скорости на траектории в прототипе показан на графиках фиг. 4.
В фиг. 4 использованы следующие условные обозначения: - На оси абсцисс приведены значения удалений объекта, находящегося в конце интервала сглаживания, от траверза 
- На оси ординат приведены значения смещения оценок радиальной скорости  При этом сплошной линией приведены графики зависимости значений смещения оценок радиальной скорости
При этом сплошной линией приведены графики зависимости значений смещения оценок радиальной скорости  от удалений объекта от траверза
от удалений объекта от траверза  при оценивании радиальной скорости в середине интервала сглаживания, а пунктирной линией - графики смещения оценок
при оценивании радиальной скорости в середине интервала сглаживания, а пунктирной линией - графики смещения оценок  при оценивании радиальной скорости в конце интервала сглаживания Как видно из графиков, смещения оценок радиальной скорости достигают максимума при нахождении объекта на траверзе для приближающихся к РЛС объектов и в 30 км после траверза - для удаляющихся объектов. При этом смещения
при оценивании радиальной скорости в конце интервала сглаживания Как видно из графиков, смещения оценок радиальной скорости достигают максимума при нахождении объекта на траверзе для приближающихся к РЛС объектов и в 30 км после траверза - для удаляющихся объектов. При этом смещения  в середине интервала сглаживания в несколько раз меньше смещений
в середине интервала сглаживания в несколько раз меньше смещений  На удалениях объектов более 60 км от траверза смещения можно не учитывать.
На удалениях объектов более 60 км от траверза смещения можно не учитывать.
В предлагаемом изобретении смещения оценок во всех случаях устраняются. Это обусловлено тем, что закон изменения квадрата дальности во времени на линейной траектории описывается полиномом второй степени:

где  - дальность и радиальная скорость цели в конце интервала сглаживания.
- дальность и радиальная скорость цели в конце интервала сглаживания.
Так как постоянный коэффициент  второго члена полинома (10) имеет смысл первого приращения квадрата дальности
второго члена полинома (10) имеет смысл первого приращения квадрата дальности  радиальная скорость определяется без смещения.
радиальная скорость определяется без смещения.
Так как закон изменения дальности во времени на линейной траектории описывается полиномами выше второй степени

радиальная скорость определяется со смещением.
Эта закономерность сохраняется при оценивании радиальной скорости в начале и в середине интервала сглаживания [4, С. 158-159].
В заявленном изобретении и в прототипе обеспечивается однозначное определение радиальной скорости в отличие от способов, основанных на использовании эффекта Доплера.
Неоднозначность определения радиальной скорости в этих способах характеризуется коэффициентом неоднозначности, равным целому числу интервалов однозначного измерения радиальной скорости  укладывающихся в пределах истинной радиальной скорости
укладывающихся в пределах истинной радиальной скорости  [1]:
[1]:
где int(*) означает операцию взятия целой части от числа.
В качестве примера в последних строках таблицы приведены значения радиальной скорости объекта, измеренные в РЛС с длиной волны λ=10 см и частотой повторения Fп - 1000 Гц (максимальной дальностью 150 км). Как видно из таблицы и графиков фиг. 4, смещения оценки в середине интервала  соизмеримы с максимальной однозначно измеряемой скоростью
соизмеримы с максимальной однозначно измеряемой скоростью  а смещения на краях интервала
а смещения на краях интервала  существенно, в разы, превосходят ее. Поэтому для устранения неоднозначности радиальной скорости необходимо оценивать ее заявленным способом, то есть по выборкам квадратов дальности в середине интервала сглаживания, так как в этом случае смещения оценок отсутствуют, а случайные среднеквадратические ошибки оценивания до 4-х раз меньше, чем па краях интервала сглаживания.
существенно, в разы, превосходят ее. Поэтому для устранения неоднозначности радиальной скорости необходимо оценивать ее заявленным способом, то есть по выборкам квадратов дальности в середине интервала сглаживания, так как в этом случае смещения оценок отсутствуют, а случайные среднеквадратические ошибки оценивания до 4-х раз меньше, чем па краях интервала сглаживания.
Таким образом, доказана реализуемость заявленного технического результата, то есть устраняются динамические ошибки при оценивании радиальной скорости по выборкам квадратов дальности до объекта, перемещающегося по линейной траектории, и устраняется неоднозначность определения радиальной скорости за счет оценивания ее по выборкам квадратов дальности.
Список использованных источников
1. Губин В.А., Клюев Н.Ф., Костылев А.А. и др. Основы радионавигационных измерений/ Под ред. Н.Ф. Клюева - М: Минобороны СССР, 1987, 429 с.
2. Бартон Д., Вард. Г. Справочник по радиолокационным измерениям / Пер. с англ. Под ред. М.М. Вейсбейна - М: Сов. радио, 1976, 398 с.
3. Кузьмин С.З. Цифровая обработка радиолокационной информации. М.: «Советское радио», 1967, 400 с.
4. Кузьмин С.З. Основы проектирования систем цифровой обработки радиолокационной информации. М.: «Советское радио», 1986, 352 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПУТЕВОЙ СКОРОСТИ НЕМАНЕВРИРУЮЩЕЙ ЦЕЛИ С ИСПОЛЬЗОВАНИЕМ ОЦЕНОК ЕЕ РАДИАЛЬНОГО УСКОРЕНИЯ | 2021 |
|
RU2782527C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МОМЕНТА ОКОНЧАНИЯ АКТИВНОГО УЧАСТКА БАЛЛИСТИЧЕСКОЙ ТРАЕКТОРИИ ПО ВЫБОРКАМ КВАДРАТОВ ДАЛЬНОСТИ | 2020 |
|
RU2752265C1 |
| Способ определения модуля скорости баллистического объекта с использованием выборки произведений дальности на радиальную скорость и устройство для его реализации | 2015 |
|
RU2634479C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ВЕРТИКАЛЬНОЙ СКОРОСТИ БАЛЛИСТИЧЕСКОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2646854C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КУРСА ОБЪЕКТА НА ЛИНЕЙНОЙ ТРАЕКТОРИИ С ИСПОЛЬЗОВАНИЕМ ИЗМЕРЕНИЙ ЕГО РАДИАЛЬНОЙ СКОРОСТИ | 2019 |
|
RU2714884C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МОДУЛЯ СКОРОСТИ БАЛЛИСТИЧЕСКОГО ОБЪЕКТА С ИСПОЛЬЗОВАНИЕМ ВЫБОРКИ КВАДРАТОВ ДАЛЬНОСТИ | 2015 |
|
RU2658317C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МОДУЛЯ СКОРОСТИ БАЛЛИСТИЧЕСКОЙ ЦЕЛИ С ИСПОЛЬЗОВАНИЕМ ОЦЕНОК ЕЕ РАДИАЛЬНОГО УСКОРЕНИЯ ПРИ НЕОДНОЗНАЧНЫХ ИЗМЕРЕНИЯХ РАДИАЛЬНОЙ СКОРОСТИ | 2021 |
|
RU2796965C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВЕРТИКАЛЬНОЙ СКОРОСТИ БАЛЛИСТИЧЕСКОЙ ЦЕЛИ С ИСПОЛЬЗОВАНИЕМ ОЦЕНОК ПЕРВОГО И ВТОРОГО ПРИРАЩЕНИЙ ЕЕ РАДИАЛЬНОЙ СКОРОСТИ | 2021 |
|
RU2797227C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КУРСА ОБЪЕКТА НА ЛИНЕЙНОЙ ТРАЕКТОРИИ С ИСПОЛЬЗОВАНИЕМ ВЫБОРОК КВАДРАТОВ ДАЛЬНОСТИ | 2020 |
|
RU2753615C1 |
| СПОСОБ РАСПОЗНАВАНИЯ БАЛЛИСТИЧЕСКОЙ ЦЕЛИ С ИСПОЛЬЗОВАНИЕМ ОЦЕНОК ПЕРВОГО И ВТОРОГО ПРИРАЩЕНИЙ РАДИАЛЬНОЙ СКОРОСТИ | 2022 |
|
RU2793774C1 |
Изобретение относится к области радиолокации. Технический результат изобретения заключается в устранении смещения оценок радиальной скорости объектов, перемещающихся по линейной траектории, и устранении неоднозначности определения радиальной скорости. В заявленном способе оценки радиальной скорости объекта в середине  в конце
в конце  и в начале
и в начале  интервала сглаживания определяют путем деления оценок первых приращений квадрата дальности в середине
интервала сглаживания определяют путем деления оценок первых приращений квадрата дальности в середине  в конце
в конце  и в начале
и в начале  интервала сглаживания на удвоенные значения дальности до объекта в середине rср, в конце rN и в начале r1 интервала сглаживания, а также на период обзора Т0 РЛС. При этом оценки первых приращений квадрата дальности определяют путем взвешенного суммирования фиксированной выборки квадратов дальности с соответствующими весовыми коэффициентами. 4 ил., 1 табл.
интервала сглаживания на удвоенные значения дальности до объекта в середине rср, в конце rN и в начале r1 интервала сглаживания, а также на период обзора Т0 РЛС. При этом оценки первых приращений квадрата дальности определяют путем взвешенного суммирования фиксированной выборки квадратов дальности с соответствующими весовыми коэффициентами. 4 ил., 1 табл.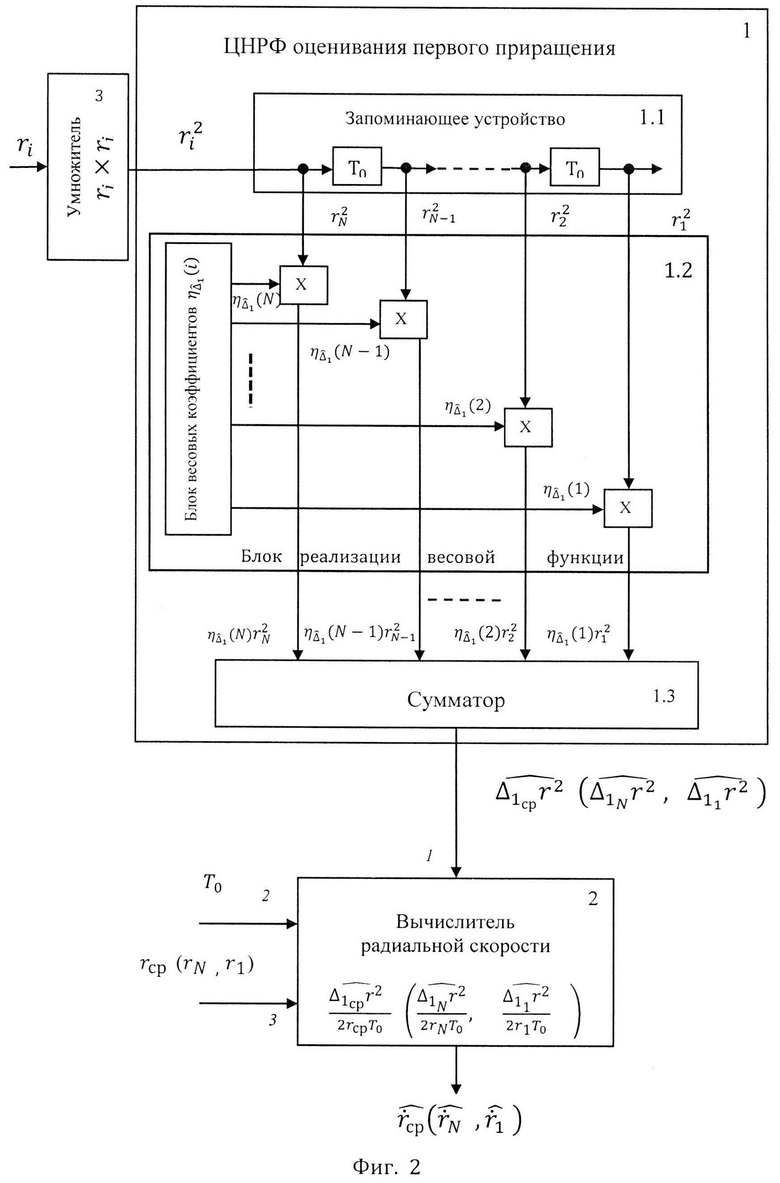
Способ определения радиальной скорости объекта по выборкам квадратов дальности, заключающийся в том, что в радиолокационной станции через одинаковые промежутки времени, равные периоду обзора Т0, измеряют дальность до объекта и преобразуют результаты измерений в цифровые сигналы, формируют фиксированную выборку сигналов, вычисляют три типа весовых коэффициентов по формулам:
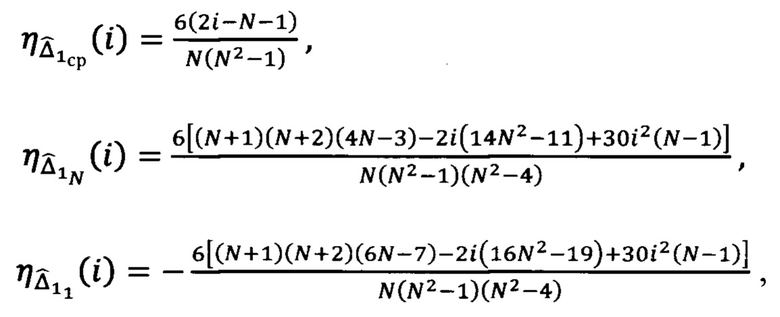
где i - порядковый номер цифрового сигнала в фиксированной выборке,
N - количество цифровых сигналов в фиксированной выборке,
умножают фиксированную выборку сигналов на полученные весовые коэффициенты  и получают три фиксированные выборки взвешенных сигналов, суммируют эти фиксированные выборки взвешенных сигналов и получают оценки первых приращений сигналов в начале, в середине и в конце интервала сглаживания, эти оценки делят на период обзора Т0, отличающийся тем, что используют цифровые сигналы квадратов дальности, для этого в каждом обзоре перемножают измеренные значения дальности ri и получают квадраты дальности ri2, которые преобразуют в цифровые сигналы, формируют фиксированную выборку сигналов квадратов дальности ri2, умножают их на весовые коэффициенты
и получают три фиксированные выборки взвешенных сигналов, суммируют эти фиксированные выборки взвешенных сигналов и получают оценки первых приращений сигналов в начале, в середине и в конце интервала сглаживания, эти оценки делят на период обзора Т0, отличающийся тем, что используют цифровые сигналы квадратов дальности, для этого в каждом обзоре перемножают измеренные значения дальности ri и получают квадраты дальности ri2, которые преобразуют в цифровые сигналы, формируют фиксированную выборку сигналов квадратов дальности ri2, умножают их на весовые коэффициенты  и получают три фиксированные выборки взвешенных сигналов квадратов дальности, полученные после суммирования трех фиксированных выборок взвешенных сигналов квадратов дальности оценки первого приращения квадрата дальности в середине
и получают три фиксированные выборки взвешенных сигналов квадратов дальности, полученные после суммирования трех фиксированных выборок взвешенных сигналов квадратов дальности оценки первого приращения квадрата дальности в середине  в конце
в конце  и в начале
и в начале  интервала сглаживания дополнительно делят на удвоенные измеренные значения дальности до объекта в середине rср, в конце rN и в начале r1 интервала сглаживания, в итоге определяют радиальные скорости объекта в середине
интервала сглаживания дополнительно делят на удвоенные измеренные значения дальности до объекта в середине rср, в конце rN и в начале r1 интервала сглаживания, в итоге определяют радиальные скорости объекта в середине  в конце
в конце  и в начале
и в начале  интервала сглаживания.
интервала сглаживания.
| СПОСОБ ОПРЕДЕЛЕНИЯ МОДУЛЯ СКОРОСТИ АЭРОДИНАМИЧЕСКОЙ ЦЕЛИ | 2012 |
|
RU2559296C2 |
| КУЗЬМИН С.З | |||
| Цифровая обработка радиолокационной информации | |||
| М.: "Советское радио", 1967, 400 с., сс.298-306, раздел 4.4.3 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ МОДУЛЯ СКОРОСТИ НЕМАНЕВРИРУЮЩЕЙ АЭРОДИНАМИЧЕСКОЙ ЦЕЛИ ПО ВЫБОРКАМ ИЗМЕРЕНИЙ ДАЛЬНОСТИ | 2017 |
|
RU2669773C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2362182C1 |
| Способ оценки радиальной скорости объекта | 2018 |
|
RU2696084C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МОДУЛЯ СКОРОСТИ БАЛЛИСТИЧЕСКОГО ОБЪЕКТА С ИСПОЛЬЗОВАНИЕМ ВЫБОРКИ КВАДРАТОВ ДАЛЬНОСТИ | 2015 |
|
RU2658317C1 |
| Способ и устройство определения путевой скорости неманеврирующего объекта по выборке произведений дальности на радиальную скорость | 2019 |
|
RU2741400C2 |
| US 10488426 B2, 26.11.2019 | |||
| WO 2019181448 A1, 26.09.2019 | |||
| CN | |||

