Область техники, к которой относится изобретение
Изобретение относиться к области возделывания зерновых культур в сельском хозяйстве при использовании информационно-управляющих систем (ИУС) и может быть применено в сельскохозяйственных предприятиях различного уровня при выборе номенклатуры машинно-тракторного парка (агрегатов, МТП), осуществляющих выполнение технологических операций на поле.
Уровень техники
Известен способ управления возделыванием зерновых культур, (1. Исакова С.П., Лапченко Е.А.. Web-комплекс на базе математической модели формирования оптимального машинно-тракторного парка // Сибирский вестник сельскохозяйственной науки. - 2016. - №5. - С. 76-82), заключающийся в том, что выполняют технологические операции агротехнологии рабочим составом агрегатов - состав агрегатов для выполнения на поле технологических операции агротехнологии, при этом рабочий состав агрегатов определяют из альтернативного состава агрегатов - состав агрегатов, планируемый для выполнения на поле технологических операции агротехнологии из базового состава агрегатов - совокупность агрегатов, необходимых для механизации работы по возделыванию сельскохозяйственных культур агротехнологии с учетом минимума затрат для выполнения технологических операций по математической модели подбора с критериальной функцией, состоящей из минимума прямых затрат с ограничением по срокам работ (1) и критерию оптимизации по числу механизаторов (2):

где - a, r, pg индексы агрегата, работы, периода работы; Gsmar - расход ГСМ кг/га;  - объем работ агрегата, га; С - стоимость ГСМ, руб./кг; ka - коэффициент учета стоимости ГСМ;
- объем работ агрегата, га; С - стоимость ГСМ, руб./кг; ka - коэффициент учета стоимости ГСМ; 
 - затраты на амортизацию для трактора и сельскохозяйственной машины, руб.;
- затраты на амортизацию для трактора и сельскохозяйственной машины, руб.; 
 - затраты на техобслуживание и ремонт для трактора и сельскохозяйственной машины, руб.;
- затраты на техобслуживание и ремонт для трактора и сельскохозяйственной машины, руб.;  - соответственно ставка механизатора, руб./смена, число механизаторов, норма при выполнении работы, смена, социальные отчисления за выполнение работы, %.
- соответственно ставка механизатора, руб./смена, число механизаторов, норма при выполнении работы, смена, социальные отчисления за выполнение работы, %.
Решение соотношений (1), (2) определяет рабочий состав агрегатов.
Недостатками рассматриваемого способа являются невозможность минимизации потерь валового продукта (зерна), связанными с огрехами обработки - необработанные участки поля или участки поля с пересевом, переопрыскиванием в операциях посева и защиты растений, поскольку подбор рабочего состава агрегатов, трека их движения на поле и параметров управления рабочими органами, определяющих отключение секций при текущем положении секции в обработанных участках поля при оценки альтернативного состав агрегатов в части агрегатов посева и защиты растений, по соотношениям (1), (2) не связан с огрехами обработки.
Наиболее близким аналогом к заявляемому изобретению является способ управления продукционным процессом сельскохозяйственных культур, (2. Агроэкологическая оценка земель, проектирование адаптивно-ландшафтных систем земледелия и агротехнологий/ Методическое руководство. Под редакцией академика РАСХН В.И. Кирюшина, академика РАСХН А.Л. Иванова ФГНУ "Росинформагротех" Москва 2005. С. 783), заключающийся в том, что выполняют технологические операции агротехнологии рабочим составом агрегатов, при этом значения урожайности и базовый состав агрегатов содержится в планируемой агротехнологии, а рабочий состав агрегатов определяют из альтернативный состав агрегатов из базового состава агрегатов агротехнологии по критерию минимизации затрат-критерий выбора альтернативного варианта состава агрегатов по эффективности живого труда, определяемой в стоимостной форме как отношение объема продукции к численности работающих, [2, с. 655, ф. 8.75 - ф. 8.79]:

при выполнении следующих групп ограничений и условий:
1. Все виды и объемы механизированных работ должны быть выполнены полностью и в рекомендуемые агросроки:

2. Потребность сельхозпредприятия в средствах механизации определяется их максимальным количеством в наиболее напряженных периодах полевого сезона:


3. Потребность в механизаторах определяется их необходимым количеством в наиболее напряженном периоде:

4. Основные переменные математической модели должны иметь неотрицательные значения:

5. Основные переменные модели должны определяться целочисленно:

где: Sf, Уf, Цf - соответственно площади, урожайности и цены реализации f-й культуры Cijk - текущие эксплуатационные затраты (без реновации) на выполнение i-й операции k-ы агрегатом в j-м периоде; Xijk - число k-х агрегатов, используемых на выполнение i-й работы в j-м периоде; Bn, Bs - соответственно балансовые цены n-х энерго- и s-x сельхозмашин; Rn, Rs - доля отчислений на реновацию (от балансовой цены) n-х энерго- s-x сельхозмашин; XNn - число n-х энергомашин в составе МТП; XSs - число s-x сельхозмашин; ХМ - общая потребность сельхозпредприятия в механизаторских кадрах; I, J, К, N, S - соответственно множество видов механизированных работ, рабочих периодов полевого сезона, видов машинно-тракторных агрегатов, энерго- и сельхозмашин; tij - продолжительность (в днях) выполнения i-ой механизированной работы в j-ый период; Wijk - дневная производительность k-ro машинного агрегата на выполнении i-й работы в j-й период; Qj - объем i-й работы, выполняемой в j-м периоде; aikn, aiks - соответственно число n-х энергомашин и s-x сельхозмашин в составе k-го агрегата на i-й работе в j-м периоде; βijn, βijs, соответственно коэффициенты комплектации энерго- и сельхозмашин (β=1 при наличии и β=0 при отсутствии машин в составе агрегата); XNn, XSs, ХМ - соответственно максимальная потребность в n-х энергомашинах, s-x сельхозмашинах и механизаторах.
Недостатками рассматриваемого способа являются то, что при определении рабочего состава агрегатов для выполнения технологических операций посева и защиты растений по критерию минимизации затрат учитываются производственные затраты, определяемые соотношением (3), при этом не учитывается ущерб от потерь урожая, связанного с огрехами обработки. Это приводит к потерям валового продукта (зерна) из-за неоптимального подбора рабочего состава агрегатов и выполнения операций защиты растений и посева не связано с минимизацией огрехов обработки.
Раскрытие изобретения
Технический результат, на достижение которого направлено предполагаемое изобретение заключается в уменьшении потерь валового продукта (зерна), связанного с огрехами обработки.
Существенными признаками, находящиеся в причинно-следственной связи с указанным техническим результатом являются действия над материальными объектами (агрегат, рабочие органы агрегата, поле, посевы), заключающийся в том, что выполняют на поле технологические операции агротехнологии рабочим составом агрегатов, при этом предпосевные операции выполняют без огрехов обработки, а рабочий состав агрегатов определяют из альтернативного состава агрегатов из базового состава агрегатов агротехнологии по критерию минимизации затрат, отличающийся тем, что состав, трек движения и параметры управления рабочими органами, определяющие отключение секций при текущем положении секции в обработанных участках поля, агрегатов посева и защиты растений определяют по критерию минимизации затрат, дополнительно включающим ущерб от потерь урожая, определяемый площадью огрехов обработки, с учетом включения в трек движения кругового обхода объектов-препятствий,
моделируемую площадь огрехов обработки определяют суммой количества маркеров определенного типа на двухкоординатной плоскости модели поля: Sis=nis⋅ksp, Sjs=njs⋅kso, где: Sis, Sjs - площади огрехов обработки, ni, nj - количество маркеров, is, js - тип огреха обработки, ksp, kso - масштаб площади маркеров посева и опрыскивания, м2,
моделируют трек движения и определяют параметры управления рабочих органов агрегата в альтернативных вариантах движения, отличающихся включением кругового обходом объектов-препятствий и точкой входа на поле трека движения,
определяют точку входа на поле трека движения с минимальным значением площади огрехов обработки,
включение кругового обхода объектов-препятствий определяют решением критерия минимизации затрат для альтернативных вариантов,
а операции посева или защиты растений выполняют в соответствии с определенными составом агрегатов, треком движения и параметрами управления рабочими органами.
При этом выполнение технологических операций агрегатами посева или защиты растений в соответствии с треком движения и параметрами управления рабочими органами определяют технический результат, заключающийся в уменьшении потерь валового продукта (зерна), связанное с ущербом от потерь урожая.
Ущерб от потерь урожая связан с огрехами обработки, поскольку недосев соответствует потери урожая, а пересев снижает урожайность на определенную величину, на зараженном поле необработанные участки при защите посевов или переопрыскивание препаратом защиты растений угнетает развитие посевов, что приводит к снижению урожайности в этих участках. Включение кругового обход объектов-препятствия уменьшает огрехи обработки, связанные с необработанными участками поля, возникающими при отгибание объектов-препятствий при обработки агрегатами посева или защиты растений. Включение кругового обхода объектов-препятствий определяют решением системы уравнений, описывающих критерий минимизации затрат.
Снижение ущерба от потерь урожая связано с уменьшением суммарной площади огрехов обработки в операциях посева или защиты растений. Уменьшение площади необработанных участков поля связано с взаимным положением границ контура поля, объектов-препятствий и трека движения агрегата, а уменьшение площади участков поля с пересевом (переопрыскиванием) связано с параметрами управления рабочими органами агрегата.
Рабочий состав агрегатов определяют из альтернативного состава агрегатов из базового состава агрегатов агротехнологии, по критерию минимизации затрат, определяемой в стоимостной форме как отношение объема продукции прогнозируемой урожайности к численности работающих, при выполнении системы технологических ограничений и балансовых уравнений, при этом объем продукции определяется по соотношением (3) с учетом ущерба от огрехов обработки U, соотношение (10, 11) при выполнении групп ограничений и условий (4-9):


где: Sis, Sjs, Kis, Kjs соответственно, площадь огреха обработки, коэффициент снижения урожайности на участках с огрехами обработки is (js)-го типа; is (js)=1, 2 тип огреха, соответственно, нет посева, пересев (неопрысканный, переопрысканный), kps, (kos) соответственно номер агрегата посева (опрыскивания), Kps, (Kos) количество соответственно агрегатов, выполняющих операции посева (опрыскивания) из планируемого состава агрегатов агротехнологии.
Оценка площади огрехов обработки для агрегатов посева или защиты растений в альтернативных вариантах рабочего состава агрегатов производиться по математической модели, представляющей из себя двух координатную плоскость, взаимосвязанную с выбранной системой спутниковых координат заданного участка поля и включающую контура границ поля и объектов препятствий, модели секционных рабочих органов агрегатов посева и опрыскивателя, имитирующих посев и опрыскивание в точке их позиционирования маркировкой результата в двух координатной плоскости, контур (трек) перемещения модели агрегата, моделирующий, например, челночный способ транспорта агрегата с разворотами на границе поля, кругового обхода объектов-препятствий и имеющий начальную точку в заданном месте контура поля, при этом моделируют перемещение агрегата с определением параметров управления рабочими органами.
Моделируемая площадь огрехов обработки определяется суммой количества маркеров определенного типа: Sis=nis⋅ksp, Sjs=njs⋅kso, где: Sis, Sjs - площади огрехов обработки, ni, nj - количество маркеров, is, js - тип огреха обработки, ksp, kso - масштаб площади маркеров посева и опрыскивания, м2. Варьируя точку входа начало трека ищут минимум огрехов обработки. Перемещение агрегата посева осуществляется по направлению линий гона агрегата защиты растений для исключения повреждения посевов при разнонаправленном перемещении. Для точки входа с минимальным значением площади огрехов обработки осуществляется перемещение агрегата посева и защиты растений с включением трека кругового обхода объектов-препятствий с вычислением огрехов обработки, запоминаются треки, соответствующие им параметры управление рабочими органами и значения площадей огрехов обработки разного типа для вариантов без кругового обхода и с круговым обходом объектов-препятствий и являются исходными данными альтернативных вариантов при расчете состава рабочего состава агрегатов по критерию минимизации затрат, соотношения (10, 11) и выполнения групп ограничений и условий (4-9).
Краткое описание чертежей
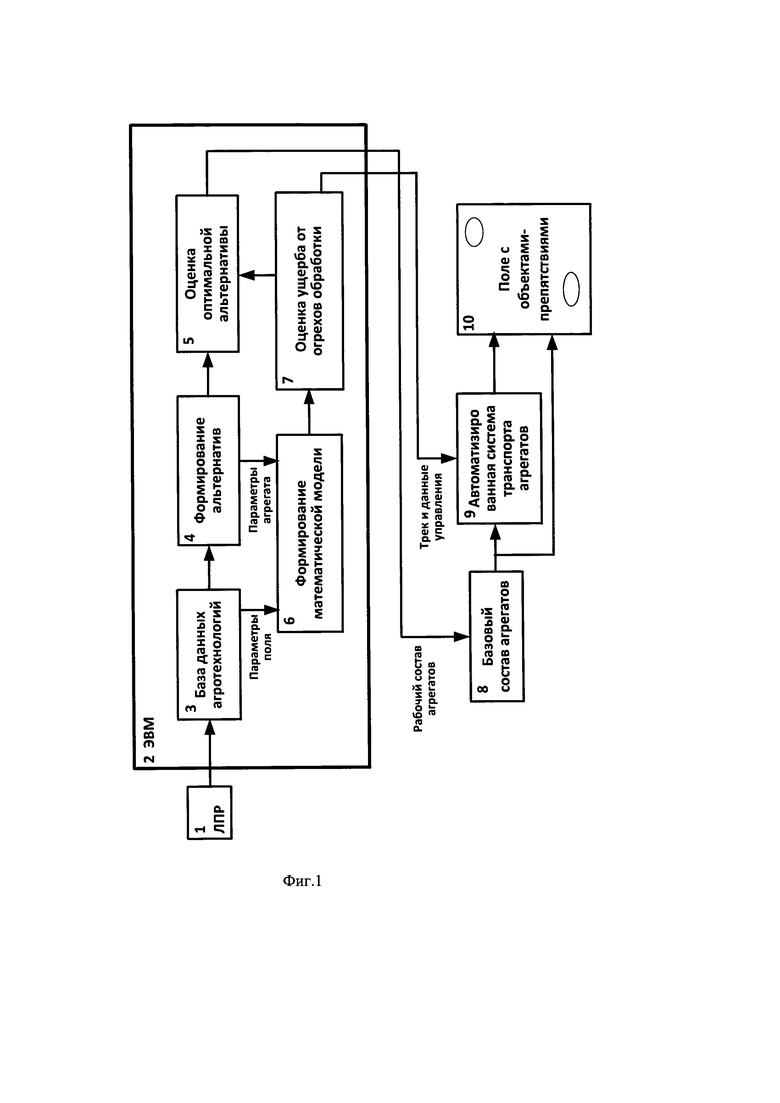
На фиг. 1 изображено устройство для реализации способа управления возделыванием зерновых культур.
Устройство состоит из информационно-управляющей системы (ИУС), содержащая лицо принимающее решение (ЛПР) 1, ЭВМ 2, базового состава агрегатов 8, автоматизированная система спутниковой навигацией транспорта агрегатов посева или защиты растений 9, поле с посевами и объектами-препятствования 10,
ЭВМ 2 состоит из программных модулей:
- 3 база данных агротехнологий, содержащая технико-экономические параметры технологических операций, базового состава агрегатов, контура поля с объектами-препятствиями,
- 4 формирование альтернатив: составление к альтернатив рабочего состава агрегатов с технико-экономическими параметрами технологических операций и агрегатов,
- 5 оценка оптимальной альтернативы состава агрегатов по критерию минимизации затрат,
- 6 формирование математической модели поля с объектами-препятствиями, агрегатов посева и защиты растений, треков перемещения при обработки, параметров управления рабочими органами и расчета огрехов обработки,
- 7 оценка ущерба от огрехов обработки к альтернатив состава агрегатов посева и защиты растений с расчетом трека движения и параметров управления рабочими органами, обеспечивающих минимальное значение ущерба вариантов без кругового обхода объектов-препятствий и с круговым обходом объектов-препятствий.
Осуществление изобретения
Способ управления возделыванием зерновых культур осуществляется следующим образом (фиг. 1): информационно-управляющая система (ИУС) с помощью ЭВМ 2 и ЛПР 1 формирует условия осуществления управления возделыванием зерновых культур в пределах поля 10, заключающиеся в определении, в пределах параметров заданной агротехнологии, предусматривающей выполнение предпосевных операции без огрехов обработки, номенклатуры рабочего состава агрегатов, удовлетворяющих критерий минимизации затрат с учетом ущерба от огрехов обработки, формирование рабочего перечня технологических операций (технологических карт), соответствующих рабочему составу агрегатов, трека движения и параметров управления рабочими органами агрегатов посева или защиты растений, рабочий состав агрегатов комплектуется из базового состава агрегатов 8, при этом агрегаты посева или защиты растений выбираются из класса агрегатов с автоматизированной системой спутниковой навигацией транспорта агрегатов с управлением рабочими органами (включением/отключением секции) файлами данных, привязанных к треку, например, сеялки точного высева HORSCH PRONTO 6 DC с управлением с помощью терминала Touch800 (Horsch) или самоходные опрыскиватели John Deere и др. Агрегаты, не относящиеся к классу агрегатов посева или защиты растений управляются механизатором.
Формирование условий для осуществления управления возделыванием зерновых культур происходит в ЭВМ 2 ИУС по алгоритму формирования альтернативного состава агрегатов, технико-экономических параметров технологических операций в пределах заданными ЛПР 1 агротехнологии и базового состава агрегатов. При этом, программный модуль 3 база данных содержит параметры агротехнологий: урожайность, технико-экономические параметры технологических операций, параметры базового состава агрегатов и контура поля с объектами-препятствиями. Программный модуль 4 формирования альтернатив составляет k альтернатив, извлекая эти данные из базы данных и передает сформированные альтернативы в программный модуль 5 оценки оптимальной альтернативы состава агрегатов по критерию минимизации затрат по формулам (10) с учетом ущерба от огрехов обработки U, (11) при выполнении групп ограничений и условий (4-9) с помощью математической модели целочисленного линейного программирования.
Для вычисления ущерба от огрехов обработки U вычисляются площади огрехов обработки k альтернатив, при этом программный модуль 6 формирование математической модели формирует математическую модель поля с объектами-препятствиями, представляющей из себя двух координатную плоскость, взаимосвязанную с выбранной системой спутниковых координат заданного участка поля и включающую контура границ поля и объектов препятствий базы данных 3, модели секционных рабочих органов агрегатов посева и опрыскивателя, имитирующих посев и опрыскивание в точке их позиционирования маркировкой результата в двух координатной плоскости, контур (трек) перемещения модели агрегата, моделирующий, например, челночный способ транспорта агрегата с разворотами на границе поля и имеющий начальную точку в заданном месте контура поля, при этом моделируют, в программном модуле 7, оценки ущерба от огрехов обработки, перемещение агрегата с управлением работой рабочих органов агрегата (секционное отключение в сеялках точного высева и опрыскивателях при текущем положении секции в полностью обработанных участках модели поля). Моделируемая площадь огрехов обработки определяется суммой количества маркеров определенного типа на двух координатной плоскости модели поля: Sis=nis⋅ksp, Sjs=njs⋅kso, где: Sis, Sjs - площади огрехов обработки, ni, nj - количество маркеров, is, js - тип огреха обработки, ksp, kso - масштаб площади маркеров посева и опрыскивания, м2. Варьируя точку входа начало трека ищем минимум огрехов обработки. Перемещение модели агрегата посева осуществляется по направлению линий гона агрегата защиты растений для исключения повреждения посевов при разнонаправленном перемещении. Для точки входа с минимальным значением площади огрехов обработки осуществляется перемещение агрегата посева и защиты растений с включением трека кругового обхода объектов-препятствий с вычислением огрехов обработки, запоминаются треки, соответствующие им параметры управление рабочими органами и значения площадей огрехов обработки разного типа для вариантов без кругового обхода и с круговым обходом объектов-препятствий. Значение ущерба U альтернативы рассчитывается по соотношению (11) и используется в программном модуле 5.
В результате оценки альтернатив программном модуле 5 с помощью математической модели целочисленного линейного программирования определяется альтернатива, имеющая максимальную производительность при минимальном значении соотношения ущерба огрехов обработки и производственных затрат, технологическая карта операций агротехнологии, номенклатура рабочего состава агрегатов, трек движения и параметры управления рабочими органами агрегатов посева и защиты растений при необходимости содержащие параметры движения кругового обхода объектов-препятствий. Рабочий состав агрегатов определяется номенклатурой из базового состава агрегатов 8. Трек движения и параметры управления рабочими органами агрегатов посева и защиты растений передается в бортовой компьютер автоматизированной системы транспорта агрегатов 9, при этом выполняются рабочие технологические операции рабочим составом агрегатов в соответствии с треком движения и параметрами управления рабочими органами. Выполнение других операции агротехнологии обуславливаются технологической картой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ непрерывного автоматического управления посевным агрегатом и агрегатом защиты растений на различных стадиях обработки сельскохозяйственного поля при спутниковой навигации | 2018 |
|
RU2708154C1 |
| Способ прогнозированного управления возделыванием зерновых культур | 2022 |
|
RU2822743C2 |
| СПОСОБ УПРАВЛЕНИЯ МАШИНОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2337851C2 |
| АГРОМАШИНА | 2004 |
|
RU2342821C2 |
| Способ мониторинга агрофизических показателей плодородия почвы в полевых условиях | 2023 |
|
RU2830298C1 |
| ЭЛЕКТРОННО-ОПТИЧЕСКИЙ СПОСОБ РЕГУЛИРОВАНИЯ ТЕХНОЛОГИИ ПРОИЗВОДСТВА АГРОПРОДУКЦИИ | 2009 |
|
RU2423042C2 |
| СПОСОБ И УСТРОЙСТВО РЕАЛИЗАЦИИ МОСТОВЫХ АГРОТЕХНОЛОГИЙ | 2009 |
|
RU2432727C2 |
| УСТРОЙСТВО ПОЗИЦИОНИРОВАНИЯ МОБИЛЬНЫХ АГРЕГАТОВ ПРИ ВОЗДЕЛЫВАНИИ АГРОКУЛЬТУР | 2010 |
|
RU2471338C2 |
| МАШИНА ДЛЯ ОБРАБОТКИ ПОЧВЫ | 2001 |
|
RU2232490C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ВОЗОБНОВЛЯЕМОГО ПРОИЗВОДСТВА АГРОПРОДУКЦИИ | 2008 |
|
RU2377764C2 |
Изобретение относится к области сельского хозяйства. Способ заключается в том, что на поле рабочим составом агрегатов выполняют технологические операции агротехнологии, при этом предпосевные операции выполняют без огрехов обработки. Рабочий состав агрегатов определяют из альтернативного состава агрегатов, из базового состава агрегатов агротехнологии по критерию минимизации затрат. Состав, трек движения и параметры управления рабочими органами, определяющие отключение секций при текущем положении секции в обработанных участках поля, агрегатов посева и защиты растений определяют по критерию минимизации затрат, дополнительно включающему ущерб от потерь урожая, определяемый площадью огрехов обработки, с учетом включения в трек движения кругового обхода объектов-препятствий. Моделируемую площадь огрехов обработки определяют суммой количества маркеров определенного типа на двухкоординатной плоскости модели поля: Sis=nis⋅ksp, Sjs=njs⋅kso, где Sis, Sjs - площади огрехов обработки, ni, nj - количество маркеров, is, js - тип огреха обработки, ksp, kso - масштаб площади маркеров посева и опрыскивания, м2. Моделируют трек движения и определяют параметры управления рабочих органов агрегата в альтернативных вариантах движения, отличающихся включением кругового обхода объектов-препятствий и точкой входа на поле трека движения. Определяют точку входа на поле трека движения с минимальным значением площади огрехов обработки. Включение кругового обхода объектов-препятствий определяют решением критерия минимизации затрат для альтернативных вариантов. Операции посева или защиты растений выполняют в соответствии с определенными составом агрегатов, треком движения и параметрами управления рабочими органами. Способ обеспечивает уменьшение потерь валового продукта – зерна, связанного с огрехами обработки. 1 ил.
Способ управления возделыванием зерновых культур, заключающийся в том, что выполняют на поле технологические операции агротехнологии рабочим составом агрегатов, при этом предпосевные операции выполняют без огрехов обработки, а рабочий состав агрегатов определяют из альтернативного состава агрегатов из базового состава агрегатов агротехнологии по критерию минимизации затрат, отличающийся тем, что состав, трек движения и параметры управления рабочими органами, определяющие отключение секций при текущем положении секции в обработанных участках поля, агрегатов посева и защиты растений определяют по критерию минимизации затрат, дополнительно включающему ущерб от потерь урожая, определяемый площадью огрехов обработки, с учетом включения в трек движения кругового обхода объектов-препятствий, моделируемую площадь огрехов обработки определяют суммой количества маркеров определенного типа на двухкоординатной плоскости модели поля: Sis=nis⋅ksp, Sjs=njs⋅kso, где: Sis, Sjs - площади огрехов обработки, ni, nj - количество маркеров, is, js - тип огреха обработки, ksp, kso - масштаб площади маркеров посева и опрыскивания, м2, моделируют трек движения и определяют параметры управления рабочих органов агрегата в альтернативных вариантах движения, отличающихся включением кругового обхода объектов-препятствий и точкой входа на поле трека движения, определяют точку входа на поле трека движения с минимальным значением площади огрехов обработки, включение кругового обхода объектов-препятствий определяют решением критерия минимизации затрат для альтернативных вариантов, а операции посева или защиты растений выполняют в соответствии с определенными составом агрегатов, треком движения и параметрами управления рабочими органами.
| Агроэкологическая оценка земель, проектирование адаптивно-ландшафтных систем земледелия и агротехнологий //Методическое руководство по агроэкологической оценке земель, проектированию адаптивно-ландшафтных систем земледелия и агротехнологий, под редакцией акад | |||
| PACXH В.И | |||
| Кирюшина, академика PACXH А.Л | |||
| Иванова, ФГНУ "Росинформагротех", Москва, |

