Область техники, к которой относится изобретение
Изобретение относится к рабочим машинам, а именно к определению состояния конструктивной части рабочей машины.
Уровень техники
Проверка состояния рабочей машины с использованием известных способов, как правило, требует чистой, контролируемой среды и специального оборудования. Поэтому часто приходилось транспортировать рабочую машину в конкретное место технического обслуживания для проверки состояния, такого как изменение зазоров и просветов в шарнирных соединениях из-за износа рабочей машины. Это означало перерывы в производстве, что приводило к менее частым проверкам, чтобы избежать перерывов на техническое обслуживание и финансовых потерь. С другой стороны, менее частые проверки увеличивают риск незапланированных поломок.
Раскрытие сущности изобретения
Таким образом, целью настоящего изобретения является создание нового способа, устройства, рабочей машины и компьютерного программного продукта. Указанная цель достигнута способом, устройством, рабочей машиной и компьютерным программным продуктом, характеризующимися признаками, указанными в независимых пунктах формулы изобретения. Некоторые предпочтительные варианты осуществления раскрыты в зависимых пунктах формулы изобретения.
Изобретение основано на идее использования измерений силы и положения для определения состояния рабочей машины. В частности, детектируют силу для инициирования изменения взаимного положения двух конструктивных частей рабочей машины, и определяют состояние на основе изменения взаимного положения первых конструктивных частей в зависимости от детектированной силы.
Преимущество указанных способа и устройства заключается в том, что они позволяют определять состояние рабочей машины практически в любом месте, например, на месте производства работ, а в некоторых случаях даже во время нормального рабочего цикла. Это позволяет избежать или свести к минимуму перерывы на техническое обслуживание для этой цели измерения и, с другой стороны, более часто определять состояния. Таким образом, износ может быть детектирован настолько рано насколько возможно, а необходимые перерывы на техническое обслуживание для замены запасных частей и тому подобное могут быть запланированы заблаговременно. Это также означает, что различные задачи технического обслуживания могут быть объединены, чтобы свести к минимуму количество перерывов на техническое обслуживание и риски незапланированных перерывов, вызванных изношенными и/или сломанными деталями, и даже риски травм, вызванных ими, могут быть сведены к минимуму.
Краткое описание чертежей
Ниже изобретение будет описано более подробно посредством предпочтительных вариантов осуществления со ссылкой на прилагаемые чертежи, на которых:
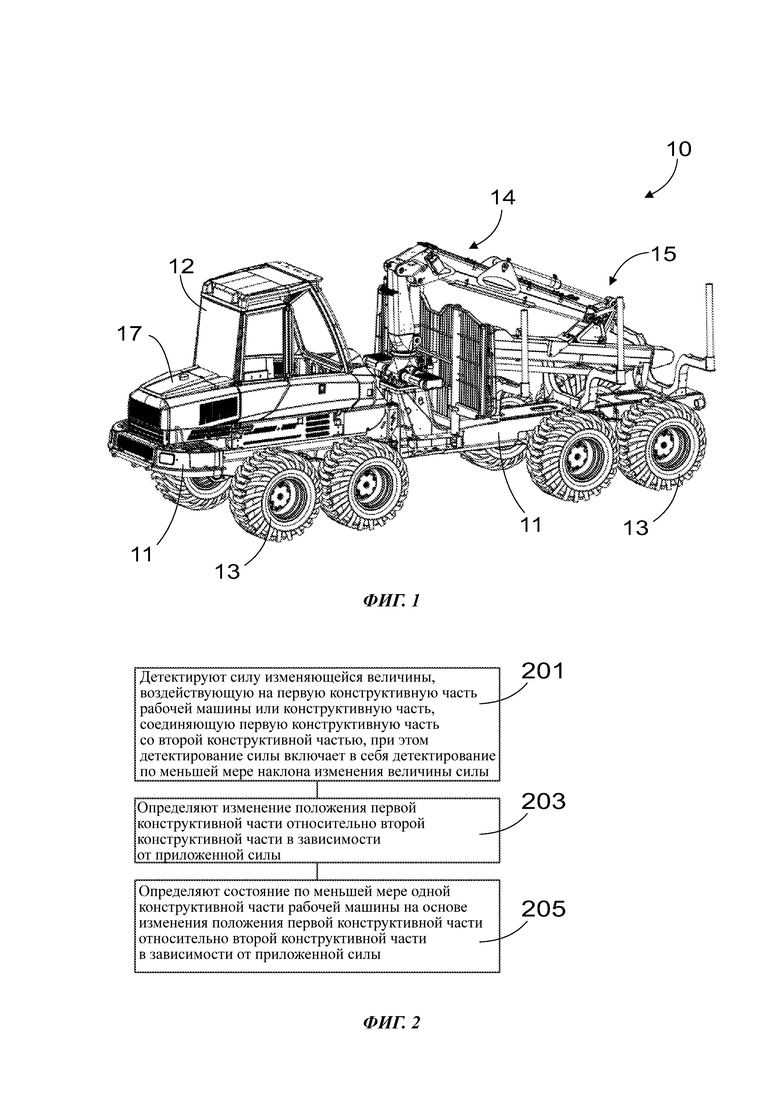
на фиг. 1 показана рабочая машина;
на фиг. 2 показан способ определения состояния по меньшей мере одной конструктивной части рабочей машины;
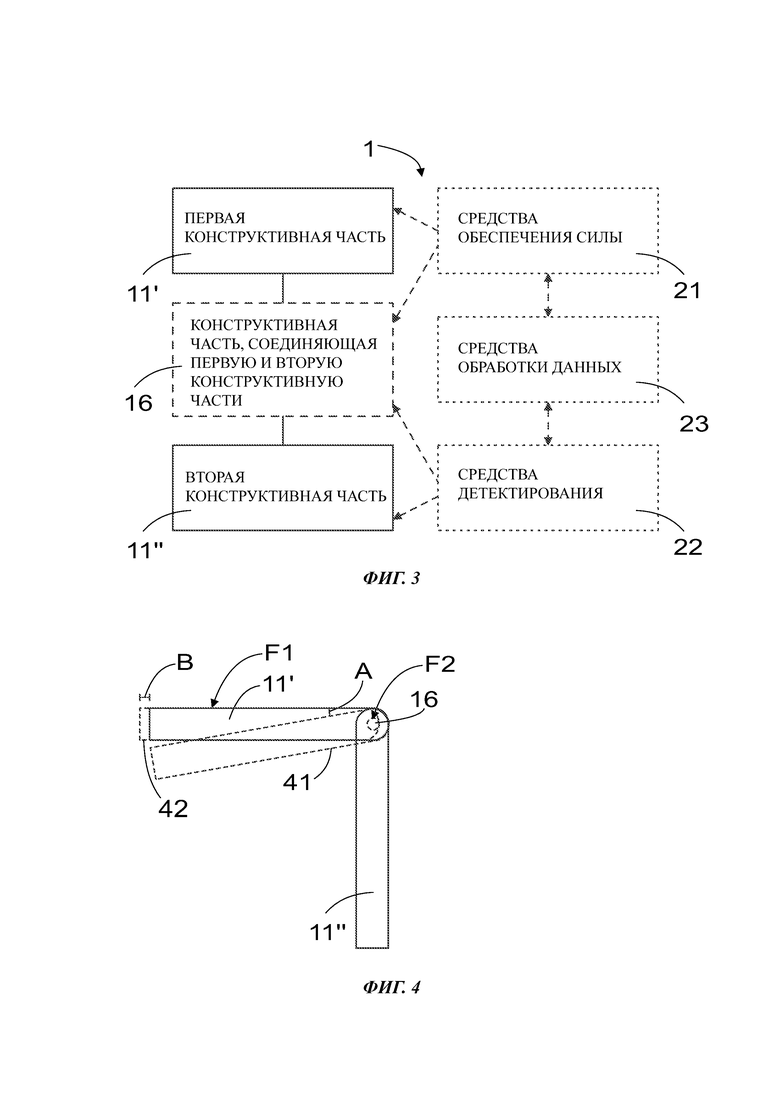
на фиг. 3 показано устройство 1 для определения состояния по меньшей мере одной конструктивной части рабочей машины;
на фиг. 4 схематически показана первая конструктивная часть и вторая конструктивная часть рабочей машины;
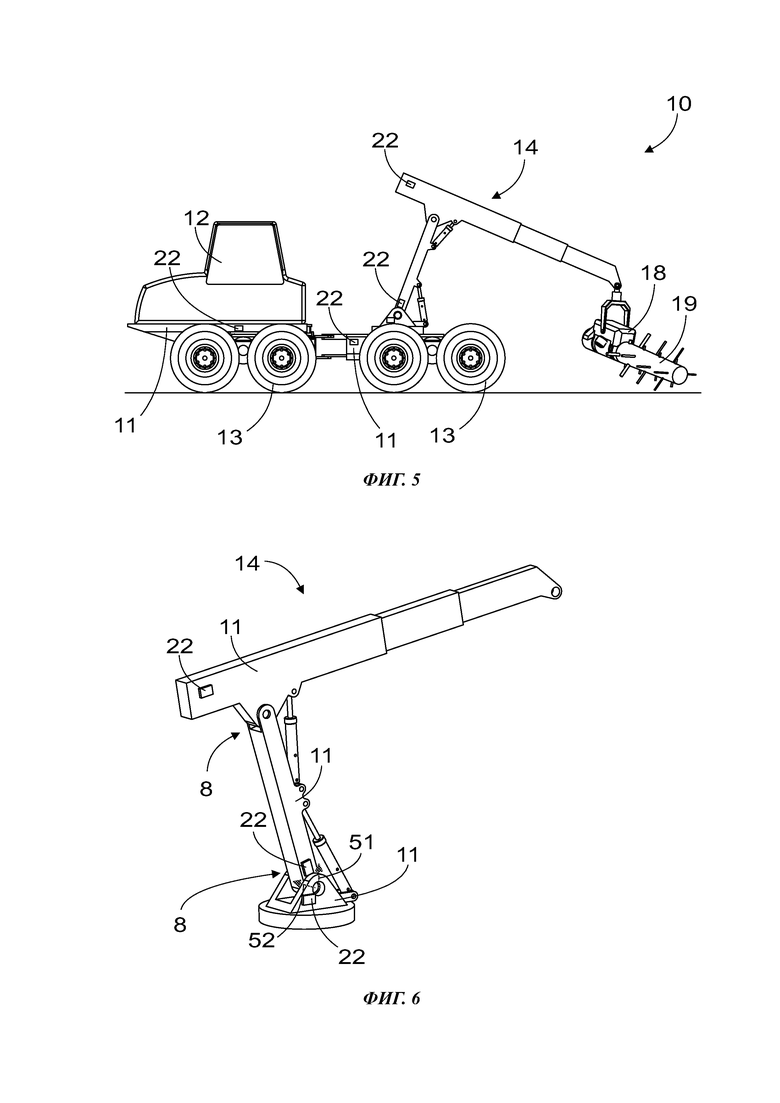
на фиг. 5 показан вариант осуществления рабочей машины;
на фиг. 6 схематически показана стрела рабочей машины; и
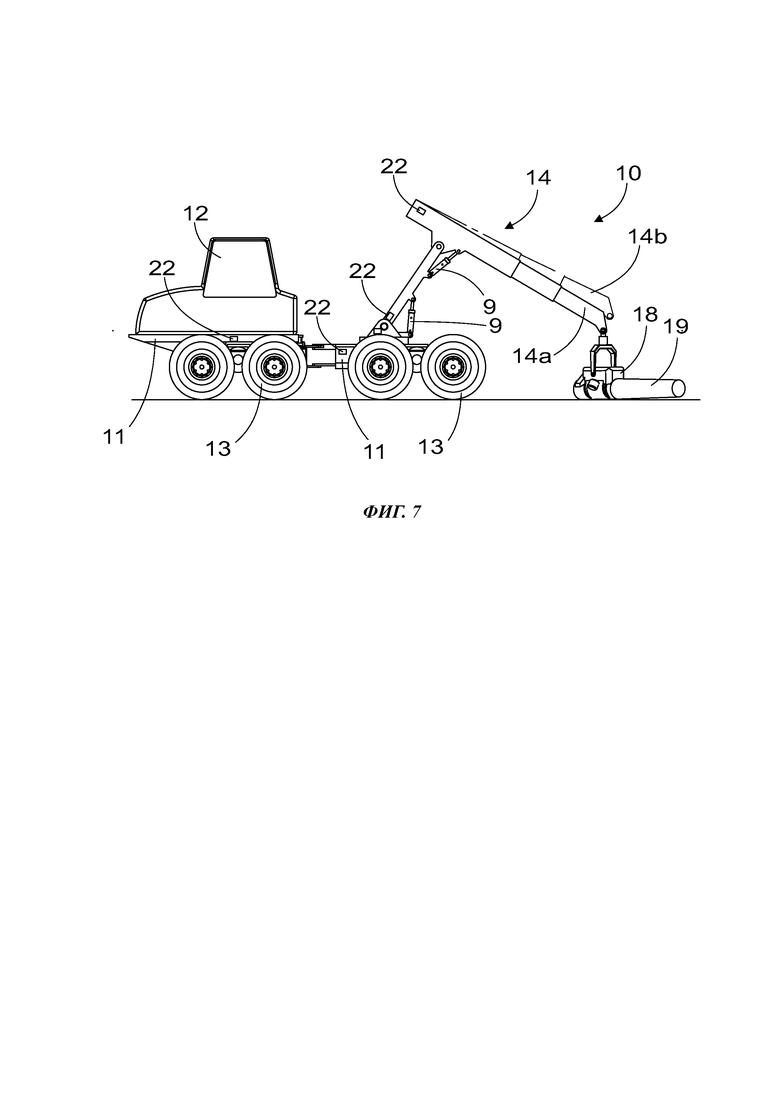
на фиг. 7 схематически показан вариант осуществления рабочей машины и изменение положения стрелы рабочей машины.
Осуществление изобретения
Рабочая машина может представлять собой любую рабочую машину, содержащую по меньшей мере две конструктивные части, первую конструктивную часть и вторую конструктивную часть. В зависимости от варианта осуществления первая конструктивная часть и вторая конструктивная часть могут быть соединены друг с другом непосредственно или опосредованно. Под первой и второй конструктивными частями, соединенными непосредственно, понимают первую конструктивную часть и вторую конструктивную часть, соединенные друг с другом без какой-либо промежуточной части или конструкции. Под первой и второй конструктивными частями, соединенными опосредованно, понимают первую конструктивную часть и вторую конструктивную часть, соединенные друг с другом с помощью одной или нескольких других частей и/или конструкций, таких как по меньшей мере одно шарнирное соединение, исполнительный элемент, подшипник, зубчатое колесо, соединитель и/или крепежный элемент.
Как в вариантах осуществления, в которых первая конструктивная часть и вторая конструктивная часть соединены непосредственно, так и в тех вариантах осуществления, в которых первая конструктивная часть и вторая конструктивная часть соединены опосредованно, перемещение первой конструктивной части и второй конструктивной части ограничено по меньшей мере в одном направлении перемещения. Перемещение в направлении, в котором движение ограничено, может быть поступательным или вращательным. В соответствии с одним вариантом осуществления, взаимное перемещение первой конструктивной части и второй конструктивной части может быть ограничено более чем в одном направлении поступательного и/или вращательного перемещения.
В соответствии с одним вариантом осуществления, перемещение первой конструктивной части и второй конструктивной части относительно друг друга по меньшей мере в одном направлении перемещения может быть полностью ограничено, при этом первая конструктивная часть и вторая конструктивная часть неподвижно соединены друг с другом в этом направлении перемещения.
В соответствии с одним вариантом осуществления, перемещение первой конструктивной части и второй конструктивной части относительно друг друга по меньшей мере в одном направлении перемещения может быть частично ограничено, при этом перемещение первой конструктивной части относительно второй конструктивной части допускается, но ограничено по величине. В зависимости от направления рассматриваемого перемещения указанная величина может включать в себя максимальный угол, максимальное расстояние, максимальную скорость разрешенного взаимного перемещения.
В соответствии с одним вариантом осуществления, первая конструктивная часть может быть соединена со второй конструктивной частью с помощью геометрического замыкания. Под геометрическим замыканием понимают состояние, в котором первая конструктивная часть и вторая конструктивная часть, или другая часть или конструкция, соединяющая первую конструктивную часть со второй конструктивной частью, содержит форму и ответную форму, которые, когда они установлены друг против друга, ограничивают взаимное перемещение первой и второй конструктивных частей по меньшей мере в одном направлении перемещения.
В соответствии с одним вариантом осуществления, рабочая машина может представлять собой передвижную рабочую машину. Это выгодно, поскольку передвижные рабочие машины обычно используются в средах, которые не являются оптимальными для традиционных способов контроля состояний, таких как износ, зазоры и просветы конструктивных частей и шарнирных соединений рабочей машины, и/или удаленно от мест технического обслуживания и соответствующего оборудования. В соответствии с одним вариантом осуществления, рабочая машина может представлять собой лесозаготовительную машину. Это особенно выгодно, поскольку лесозаготовительные машины обычно используются вдали от мест технического обслуживания и соответствующего оборудования и в условиях, особенно сложных для традиционных способов контроля износа, зазоров и просветов, и других аналогичных состояний рабочей машины.
На фиг. 1 показана рабочая машина 10. Рабочая машина на фиг. 1 представляет собой лесозаготовительную машину, в частности форвардер. Однако настоящее решение применимо для других типов лесозаготовительных машин, таких как харвестеры, а также передвижные рабочие машины и другие типы рабочих машин, причем форвардер показан исключительно для иллюстрирования типичных конструктивных частей и принципов работы (передвижной) рабочей машины.
Рабочая машина 10 может содержать одну, две или более рамных частей 11. Рабочая машина может также содержать кабину 12, расположенную по меньшей мере в одной из рамных частей 11. Кроме того, рабочая машина 10, в частности передвижная рабочая машина, может содержать движительное оборудование 13. Движительное оборудование 13 может включать в себя по меньшей мере одно из следующего: колеса, непрерывные гусеницы и другие движительные элементы для перемещения рабочей машины относительно грунта или другой рабочей платформы, известной как таковая. В соответствии с одним вариантом осуществления, рабочая машина 10 может также содержать стрелу 14. В одном варианте осуществления на фиг. 1 рабочая машина 10 дополнительно содержит другие конструктивные части, такие как загрузочное пространство 15, инструмент (не показан), такой как валочная головка или грейфер (захват), и источник 17 питания.
На фиг. 2 показан способ определения состояния по меньшей мере одной конструктивной части рабочей машины. Состояние может быть определено для первой конструктивной части 11', второй конструктивной части 11'' или конструктивной части 16, соединяющей первую и вторую конструктивные части 11', 11'' друг с другом. Каждая из первой конструктивной части 11' и второй конструктивной части 11'' может содержать по меньшей мере одно из следующего или их часть: рамную часть 11, кабину 12, часть движительного оборудования 13, стрелу 14, секцию стрелы, загрузочное пространство 15, инструмент и источник 17 питания. Каждая из первой конструктивной части 11' и второй конструктивной части 11'' может также содержать в дополнение или вместо вышеупомянутых конструктивных частей любую другую конструктивную часть рабочей машины 10, известную как таковая.
Способ может включать в себя детектирование 201 силы изменяющейся величины, воздействующей на первую конструктивную часть 11' рабочей машины 10 или конструктивную часть 16, соединяющую первую конструктивную часть 11' со второй конструктивной частью 11''. Детектируют по меньшей мере наклон (крутизну) изменения величины силы. Сила может представлять собой силу, приложенную к первой конструктивной части 11', непосредственно вызывающую силу, прямо воздействующую на первую конструктивную часть 11', или силу, предусмотренную на расстоянии от первой конструктивной части 11' или ее середины, или точки соединения и переданную ей, в результате чего сила вызывает момент, приложенный к первой конструктивной части 11'. Сила может представлять собой единственную силу или результирующую силу, вызванную несколькими силами, направленными в одном направлении и/или в разных направлениях. Такие силы могут быть приложены одними и теми же или различными внешними исполнительными элементами и/или исполнительными элементами или другими конструктивными частями рабочей машины 10.
В настоящем описании под наклоном изменения величины силы понимают первую производную силы, другими словами, кривую силы, изображенную в зависимости от времени или от другой переменной по оси х и силой по оси у. Другими словами, под наклоном кривой силы понимают скорость изменения величины силы в данный момент и, таким образом, он определяет наклон изменения величины силы.
Детектирование силы и ее величины может быть осуществлено, например, с помощью средств 22 детектирования, средств 21 обеспечения силы или средств 23 обработки данных. С одной стороны, сила и/или ее величина могут быть детектированы посредством средств 22 детектирования, например, путем восприятия, измерения или вычисления силы. Восприятие или измерение силы может быть осуществлено, например, с помощью взвешивающего устройства или датчика давления. С другой стороны, сила и/или ее величина могут быть детектированы с помощью средств 21 обеспечения силы, например, путем определения силы, обеспечиваемой и/или прилагаемой к первой конструктивной части 11' или конструктивной части 16, соединяющей первую конструктивную часть 11' со второй конструктивной частью 11''. Сила и/или ее величина также могут быть детектированы с помощью средств 23 обработки данных, например, на основе данных, предоставляемых управляющей системой рабочей машины 10.
Под наклоном изменения величины силы понимают информацию о взаимном положении первой и второй конструктивных частей 11', 11'', соответствующую силе детектированной или известной величины, воздействующей на первую конструктивную часть 11' или конструктивную часть 16, соединяющую вторую конструктивную часть 11'' с первой конструктивной частью 11'. Это означает, что необходима информация по меньшей мере о двух величинах силы, воздействующей на первую конструктивную часть 11' или конструктивную часть 16, соединяющую первую конструктивную часть 11' со второй конструктивной частью 11''. Одна из этих величин может не включать в себя силу, приложенную к первой конструктивной части 11' или конструктивной части 16, соединяющей первую конструктивную часть 11' со второй конструктивной частью 11''. Другими словами, величина внешней силы может быть равна 0. Таким образом, по меньшей мере одну величину силы, воздействующей на первую конструктивную часть 11' или конструктивную часть 16, соединяющую первую конструктивную часть 11' со второй конструктивной частью 11'', а именно вторую величину, детектируют путем измерения, расчета или определяют каким-либо другим подходящим способом. Такое состояние, в котором величина внешней силы, приложенной к первой конструктивной части 11' и/или конструктивной части 16, соединяющей первую конструктивную часть 11' со второй конструктивной частью 11'', равна 0, может быть достигнуто, например, путем установки стрелы 14 в положение, в котором к стреле 14 и/или шарнирному соединению, соединяющему секции стрелы или соединяющему стрелу 14 с рамной частью 11, например, не приложена никакая сила. Естественно, обе величины силы могут отличаться от 0, и/или обе величины силы могут быть измерены, рассчитаны или определены каким-либо другим подходящим способом.
Способ может дополнительно включать в себя определение 203 изменения положения первой конструктивной части 11' относительно второй конструктивной части 11'' в зависимости от детектированной силы. В соответствии с одним вариантом осуществления, определение 203 изменения положения первой конструктивной части 11' относительно второй конструктивной части 11'' может включать в себя определение положения первой конструктивной части 11' относительно второй конструктивной части 11'' в первый момент времени, когда детектируют силу первой известной величины, воздействующую на первую конструктивную часть 11'; определение положения первой конструктивной части 11' относительно второй конструктивной части 11'' во второй момент времени, когда детектируют силу второй известной величины, воздействующую на первую конструктивную часть 11'; и определение 203 изменения положения первой конструктивной части 11' относительно второй конструктивной части 11'' на основе этих определенных положений.
В соответствии с другим вариантом осуществления, определение 203 изменения положения первой конструктивной части 11' относительно второй конструктивной части 11'' может включать в себя определение изменения положения первой конструктивной части 11' относительно второй конструктивной части 11'' между первым моментом времени, когда детектируют силу первой известной величины, воздействующую на первую конструктивную часть 11', и вторым моментом времени, когда детектируют силу второй известной величины, воздействующую на первую конструктивную часть 11', непосредственно. Это может быть реализовано, например, путем использования первого положения в качестве опорного положения и определения второго положения относительно этого опорного положения или путем измерения изменения положения каким-либо другим способом, известным как таковой.
Под положением первой конструктивной части 11' относительно второй конструктивной части 11'' понимают взаимное поступательное и/или вращательное положение первой и второй конструктивных частей 11', 11''. Другими словами, одна или обе из первой и второй конструктивных частей 11', 11'' могут вращаться или перемещаться в поступательном направлении относительно другой.
Способ может дополнительно включать в себя определение 205 состояния по меньшей мере одной конструктивной части 11', 11'', 16 рабочей машины на основе изменения положения первой конструктивной части 11' относительно второй конструктивной части 11'' в зависимости от детектированной силы. Под изменением положения первой конструктивной части 11' относительно второй конструктивной части 11'' в зависимости от детектированной силы понимают зависимость между детектированной силой и изменением взаимного положения первой и второй конструктивных частей 11', 11''.
Другими словами, в способе, устройстве, рабочей машине и/или компьютерном программном продукте настоящего описания сила, воздействующая на первую конструктивную часть 11' или конструктивную часть 16, соединяющую первую конструктивную часть 11' со второй конструктивной частью 11'', предусмотрена такая, чтобы вызвать изменение взаимного положения между первой конструктивной частью 11' и второй конструктивной частью 11'' рабочей машины 10. Состояние по меньшей мере одной конструктивной части 11', 11'', 16 рабочей машины 10 затем определяют на основе изменения взаимного положения первой конструктивной части 11' и второй конструктивной части 11'' в зависимости от детектированной силы.
В соответствии с одним вариантом осуществления, способ дополнительно включает в себя приложение силы, и/или устройство, рабочая машина и/или компьютерный программный продукт дополнительно выполнены с возможностью приложения силы изменяющейся величины к первой конструктивной части 11' рабочей машины 10 или конструктивной части 16, соединяющей первую конструктивную часть 11' со второй конструктивной частью 11''. Детектируют по меньшей мере наклон (крутизну) изменения величины силы.
В соответствии с одним вариантом осуществления, состояние определяют для первой конструктивной части 11'. Другими словами, в способе, устройстве и компьютерном программном продукте может быть определено состояние конструктивной части, на которую непосредственно или опосредованно воздействует сила. В соответствии с другим вариантом осуществления, в способе, устройстве и компьютерном программном продукте определяют состояние для второй конструктивной части 11'', которая отличается от первой конструктивной части 11', но находится в соединении с ней. В зависимости от варианта осуществления первая конструктивная часть 11' и вторая конструктивная часть 11'' могут быть соединены непосредственно или опосредованно, как объяснено выше. В соответствии со следующим вариантом осуществления, состояние определяют для конструктивной части 16, соединяющей по меньшей мере две конструктивные части рабочей машины, первую конструктивную часть 11' и вторую конструктивную часть 11''.
В соответствии с одним вариантом осуществления, состояние определяют для шарнирного соединения, соединяющего по меньшей мере две конструктивные части 11, 11', 11'', 16 рабочей машины. В соответствии с одним вариантом осуществления, первая конструктивная часть 11' может представлять собой шарнирное соединение. В соответствии с другим вариантом осуществления, первая конструктивная часть 11' может представлять собой по меньшей мере одну из конструктивных частей 11, 11', 11'', 16, соединенных друг с другом посредством указанного шарнирного соединения.
В соответствии с одним вариантом осуществления, состояние по меньшей мере одной конструктивной части может быть определено на основе углового коэффициента изменения положения первой конструктивной части 11', такого как положение первой конструктивной части 11' относительно второй конструктивной части 11'', в зависимости от детектированной силы. Угловой коэффициент описывает скорость, с которой сила изменяется в данный момент. В вариантах осуществления, в которых сила увеличивается или уменьшается с постоянной скоростью, может быть достаточно двух точек измерения, одна из которых может быть даже нулевой силой. В вариантах осуществления, в которых сила постоянно изменяется с различной скоростью, угловой коэффициент может быть определен в нескольких точках измерения или даже непрерывно для определения состояния.
В соответствии с одним вариантом осуществления, состояние по меньшей мере одной конструктивной части 11', 11'', 16 может включать в себя износ конструктивной части. В соответствии с одним вариантом осуществления, износ по меньшей мере одной конструктивной части 11', 11'', 16 может включать в себя изменение просвета или зазора в соединении между первой и второй конструктивными частями 11', 11''.
В соответствии с одним вариантом осуществления, определение состояния по меньшей мере одной конструктивной части может включать в себя определение по меньшей мере одного из следующего: зазора в конструктивной части, зазора в шарнирном соединении двух конструктивных частей, деформации конструктивной части, деформации шарнирного соединения двух конструктивных частей, изгиба по меньшей мере одной конструктивной части и утечки в конструктивной части.
Просвет или зазор может представлять собой, например, зазор в осевом подшипнике, зазор в исполнительном элементе, зазор в трансмиссии и/или механический зазор. Зазор в осевом подшипнике может представлять собой, например, зазор в шарнирном соединении или телескопическом механизме. Зазор в исполнительном элементе может представлять собой, например, зазор в крепежных средствах исполнительного элемента, например, в размере монтажного кронштейна, или зазор в размерах самого исполнительного элемента. Зазор в трансмиссии может представлять собой, например, зазор в размерах зубчатой передачи или другого типа устройства передачи на основе формы. Механический зазор может представлять собой, например, зазор в размерах запорного механизма или монтажного механизма.
На фиг. 6 схематически показана стрела рабочей машины. На фиг. 6 также показано шарнирное соединение 8, в частности два шарнирных соединения 8, и различные типы просвета или зазора в связи с таким шарнирным соединением. На фиг. 6 показаны направления радиального зазора 51 и осевого зазора 52. На фиг. 6 также показан вариант осуществления снабжения средствами 22 детектирования по меньшей мере двух конструктивных частей 11, в частности трех конструктивных частей 11. В таком варианте осуществления любая из конструктивных частей 11, снабженных средствами 22 детектирования, может представлять собой первую конструктивную часть 11', а одна из других конструктивных частей 11 может представлять собой вторую конструктивную часть 11''. В зависимости от варианта осуществления сила может воздействовать на одну из конструктивных частей 11 или на конструктивную часть 16, соединяющую вторую конструктивную часть с первой конструктивной частью, в данном случае на шарнирное соединение 8, соединяющее конструктивные части 11. Средства 22 детектирования могут включать в себя, например, инерционный датчик. Инерционный датчик может включать в себя, например, инерциальный блок измерения. Средства 22 детектирования могут также включать в себя некоторые другие типы средств детектирования, раскрытые в этом описании.
В соответствии с одним вариантом осуществления, изменение положения первой конструктивной части 11' относительно второй конструктивной части 11'' определяют путем непосредственного определения изменения положения первой конструктивной части относительно второй конструктивной части. В соответствии с другим вариантом осуществления, изменение положения первой конструктивной части 11' относительно второй конструктивной части 11'' определяют путем определения изменения положения каждой из первой конструктивной части 11' и/или второй конструктивной части 11'' относительно грунта или другой рабочей платформы или поверхности рабочей машины, причем на основе этой информации определяют изменение взаимного положения первой и второй конструктивных частей 11', 11''.
В соответствии с одним вариантом осуществления, изменение положения первой конструктивной части 11' может быть определено путем определения по меньшей мере в одном направлении измерения по меньшей мере двух различных измеряемых переменных - первой и второй измеряемых переменных; приема первого и второго измерительных сигналов, описывающих первую и вторую измеряемые переменные в средствах обработки данных; и определения изменения положения первой конструктивной части на основе первой и второй измеряемых переменных.
Определение по меньшей мере двух различных измеряемых переменных для направления измерения и для конструктивной части позволяет использовать средние значения измерений и/или быстро и точно компенсировать погрешности измерений, возникающие в одной измеряемой переменной и вызванные различными возмущениями. В таком случае путем объединения сигналов датчика ускорения и/или датчика угловой скорости, и/или датчика углового ускорения для компенсации погрешностей измерения можно надежно рассчитать угловое положение и/или угловую скорость каждой конструктивной части. Определение углового положения и угловой скорости на основе измерительных сигналов датчика ускорения, датчика угловой скорости или датчика углового ускорения известно само по себе и, следовательно, не нуждается в более подробном объяснении в настоящем документе. Работа датчика ускорения и инклинометра основана на обнаружении ускорения движения и гравитационного ускорения датчика, поэтому в связи с раскрытыми решениями эти типы датчиков соответствуют друг другу и могут считаться равными в раскрытых решениях. Использование этих детекторов обеспечивает, например, то преимущество, что информация о положении или состоянии движения может определяться посредством небольших, недорогих, надежных и долговечных детекторов, которые часто также могут быть расположены довольно свободно в отслеживаемой конструктивной части. По сравнению с существующими решениями, например, долговечные датчики угла шарнирного соединения и датчики линейного положения являются дорогостоящими.
В соответствии с одним вариантом осуществления, изменение положения первой конструктивной части определяют с помощью по меньшей мере одного из следующего: инклинометра, датчика ускорения, датчика углового ускорения, гироскопа, магнитометра, емкостного датчика расстояния, инерциального измерительного блока и оптического датчика.
В соответствии с одним вариантом осуществления, первый и/или второй измерительный сигнал может содержать по меньшей мере один из сигналов следующего: инклинометра, датчика ускорения, датчика углового ускорения, гироскопа, магнитометра, емкостного датчика расстояния, инерциального измерительного блока и оптического датчика.
В соответствии с одним вариантом осуществления, по меньшей мере одна измеряемая переменная представляет собой изменение положения первой конструктивной части 11', например первая измеряемая переменная и/или вторая измеряемая переменная может включать в себя по меньшей мере два параметра из следующих: ускорение, угловую скорость и угловое ускорение.
В соответствии с одним вариантом осуществления, силу прикладывают к первой конструктивной части 11' посредством исполнительного элемента рабочей машины 10 или по меньшей мере к одной конструктивной части рабочей машины 10. Другими словами, сила, необходимая для определения состояния по меньшей мере одной конструктивной части рабочей машины, может быть обеспечена самой рабочей машиной. Это выгодно, так как, таким образом, для этого не требуется никаких средств, обеспечивающих внешнюю силу. Таким образом, состояние рабочей машины может быть определено даже на месте, где отсутствуют такие средства, обеспечивающие внешнюю силу. В соответствии с одним вариантом осуществления, сила может быть приложена к первой конструктивной части, например, посредством стрелы рабочей машины.
В соответствии с одним вариантом осуществления, сила может быть приложена к первой конструктивной части 11' посредством исполнительного элемента, внешнего по отношению к рабочей машине 10. Это требует внешнего оборудования, но может позволить, например, более точно управлять прикладываемой силой.
В соответствии с одним вариантом осуществления, может быть установлен предварительно заданный интервал времени для определения состояния по меньшей мере одной конструктивной части.
В соответствии с одним вариантом осуществления, состояние по меньшей мере одной конструктивной части 11', 11'', 16 может быть определено автоматически во время нормального использования рабочей машины 10, например, в предварительно заданный интервал времени. Это особенно полезно, так как нормальное использование рабочей машины не нужно прерывать, и не требуется никаких активных действий от оператора рабочей машины. Это облегчает непрерывное отслеживание состояния рабочей машины и позволяет детектировать ранние признаки износа, например, предоставляя больше времени и альтернатив для планирования действий по техническому обслуживанию. В таком варианте осуществления не требуется отдельной проверочной силы. Вместо этого, силы, связанные с нормальным использованием рабочей машины 10, другими словами, силы, связанные с выполнением других функций рабочей машины, могут быть использованы для определения состояния по меньшей мере одной конструктивной части. В соответствии с другим вариантом осуществления, средства обработки данных рабочей машины могут быть выполнены с возможностью выдачи сигнала тревоги или напоминания оператору в предварительно заданные интервалы времени для определения состояния. В зависимости от варианта осуществления оператор может представлять собой, например, владельца, специалиста по техническому обслуживанию, водителя или диспетчера рабочей машины.
В соответствии с одним вариантом осуществления, для состояния по меньшей мере одной конструктивной части 11', 11'', 16 может быть установлен контрольный предел. Кроме того, может быть инициировано действие в ответ на определенное состояние, превышающее или находящееся ниже контрольного предела. В соответствии с одним вариантом осуществления, действие может включать в себя по меньшей мере одно из следующего: инициирование сигнала тревоги, предусмотренного для оператора, и воздействие на работу рабочей машины. Воздействие на работу рабочей машины может включать в себя ограничение работы рабочей машины, например ограничение крайних положений или обрабатываемых нагрузок, или даже прекращение работы рабочей машины в случае повышенного риска.
На фиг. 3 показано устройство 1 для определения состояния по меньшей мере одной конструктивной части 11', 11'', 16 рабочей машины 10. Устройство 1 может содержать средства 22 детектирования, выполненные с возможностью определения изменения положения первой конструктивной части 11' рабочей машины 10 относительно второй конструктивной части 11''. Средства детектирования могут включать в себя, например, по меньшей мере один детектор.
Устройство может дополнительно содержать средства 23 обработки данных, выполненные с возможностью определения состояния по меньшей мере одной конструктивной части 11', 11'', 16 рабочей машины 10 на основе изменения положения первой конструктивной части 11' относительно второй конструктивной части 11'' в зависимости от детектированной силы. Средства 23 обработки данных могут быть дополнительно выполнены с возможностью реализации одной или нескольких функций способов, описанных в настоящем описании и на сопроводительных фигурах, и/или с возможностью инициирования рабочей машины 10 и/или ее части (частей), такой как конструктивная часть (части), реализовать по меньшей мере одну или несколько функций способов, описанных в настоящем описании и на сопроводительных фигурах.
В соответствии с одним вариантом осуществления, устройство 1 может дополнительно содержать средства 21 обеспечения силы, выполненные с возможностью приложения силы изменяющейся величины к первой конструктивной части 11' рабочей машины 10. Может быть известен по меньшей мере наклон изменения величины силы, как описано выше.
В соответствии с одним вариантом осуществления, средства 22 детектирования, средства 23 обработки данных и/или средства 21 обеспечения силы могут быть выполнены с возможностью детектирования по меньшей мере наклона изменения величины силы изменяющейся величины, воздействующей на первую конструктивную часть 11'. В соответствии с одним вариантом осуществления, средства 22 детектирования, средства 23 обработки данных и/или средства 21 обеспечения силы могут быть выполнены с возможностью детектирования изменения положения первой конструктивной части 11' рабочей машины 10 относительно второй конструктивной части 11'' в зависимости от детектированной силы.
В соответствии с одним вариантом осуществления, средства обеспечения силы могут включать в себя исполнительный элемент рабочей машины. В соответствии с другим вариантом осуществления, средства обеспечения силы включают в себя внешний исполнительный элемент. В соответствии с другим вариантом осуществления, сила может быть обеспечена путем приведения рабочей машины 10 в движение по наклонному или неровному основанию. В таком варианте осуществления средства обеспечения силы могут включать в себя конструктивные части рабочей машины, такие как трансмиссия привода, по меньшей мере одна рамная часть 11, стрела 14 и/или движительное оборудование 13 рабочей машины 10.
В соответствии с одним вариантом осуществления, средства детектирования могут быть расположены неподвижно на рабочей машине. В соответствии с другим вариантом осуществления, средства детектирования могут содержать средства детектирования, которые могут быть соединены с рабочей машиной и средствами обработки данных с возможностью отсоединения.
В соответствии с одним вариантом осуществления, рабочая машина может содержать устройство, описанное выше, и/или может быть выполнена с возможностью реализации по меньшей мере одного из этапов способа, описанного выше.
На фиг. 4 схематически показана первая конструктивная часть 11' и вторая конструктивная часть 11'' рабочей машины 10, а также некоторые основные концепции устройства и способа, описанные выше. В соответствии с одним вариантом осуществления, первая конструктивная часть 11' и вторая конструктивная часть 11'' могут быть соединены друг с другом посредством конструктивной части 16, соединяющей первую и вторую конструктивные части 11', 11'' друг с другом. Эта опциональная конструктивная часть 16, соединяющая первую и вторую конструктивные части, показана на фиг. 4 штриховой линией.
В соответствии с одним вариантом осуществления, сила изменяющейся величины может воздействовать на первую конструктивную часть 11' рабочей машины 10. На фиг. 4 это проиллюстрировано стрелкой F1. В соответствии с другим вариантом осуществления, сила изменяющейся величины может воздействовать на конструктивную часть 16, соединяющую первую конструктивную часть 11' со второй конструктивной частью 11''. На фиг. 4 это проиллюстрировано стрелкой F2.
В соответствии с одним вариантом осуществления, изменение положения первой конструктивной части 11' относительно второй конструктивной части 11'' может представлять собой поворотное изменение, такое как изменение угла А на фиг. 4, причем измененное положение первой конструктивной части 11' относительно второй конструктивной части 11'' показано первой штриховой линией 41. В соответствии со вторым вариантом осуществления, изменение положения первой конструктивной части 11' относительно второй конструктивной части 11' может представлять собой латеральное изменение, такое как изменение расстояния В на фиг. 4, причем измененное положение первой конструктивной части 11' относительно второй конструктивной части 11'' показано второй штриховой линией 42. В соответствии с третьим вариантом осуществления, изменение положения первой конструктивной части 11' относительно второй конструктивной части 11'' может представлять собой комбинацию поворотного изменения и латерального изменения.
На фиг. 5 показан вариант осуществления рабочей машины. В варианте осуществления на фиг. 5 рабочая машина 10 представляет собой харвестер. На фиг. 5 некоторые конструктивные части рабочей машины 10 отмечены ссылочными обозначениями. Многие из этих конструктивных частей могут включать в себя конструктивные части, аналогичные рабочей машине 10 с фиг. 1. С другой стороны, рабочая машина 10 может также содержать конструктивные части, отличные от конструктивных частей, представленных на фиг. 1, вместо или в дополнение к конструктивным частям, описанным в связи с фиг. 1 и другими вариантами осуществления, раскрытыми в этом описании. Рабочая машина 10 может, например, содержать инструмент 18, такой как харвестерная головка. На рис. 5 показана харвестерная головка, удерживающая ствол 19.
На фиг. 5 также показаны средства 22 детектирования, предусмотренные в рабочей машине 10. Средства 22 детектирования, показанные на фиг. 5, иллюстрируют только один вариант осуществления, и в различных вариантах осуществления рабочая машина 10 может не содержать ни одного, или содержать одно, два или более двух средств 22 детектирования, указанных на фиг. 5, и/или один, два или несколько элементов средств 22 детектирования, не показанных на фиг. 5. В варианте осуществления на фиг. 5 средства 22 детектирования предусмотрены в двух рамных частях 11 и двух секциях стрелы 14. В соответствии с другими вариантами осуществления, средства 22 детектирования могут быть предусмотрены, например, в кабине 12, дополнительной секции стрелы, инструменте 18 и/или по меньшей мере в одной другой конструктивной части рабочей машины 10.
На фиг. 7 схематически показан вариант осуществления рабочей машины 10 и изменение положения конструктивной части, в частности наружной секции стрелы 14, рабочей машины 10. На фиг. 7 схематически показано изменение положения первой конструктивной части, в частности внешней секции стрелы 14, путем отображения первого положения внешней секции стрелы ссылочным обозначением 14а и второго положения внешней секции стрелы ссылочным обозначением 14b. Таким образом, изменение положения внешней секции стрелы 14 включает в себя разницу между первым положением первой конструктивной части, а именно внешней секции стрелы 14, и вторым положением первой конструктивной части. Под положением первой конструктивной части 11' могут понимать положение первой конструктивной части 11' по отношению ко второй конструктивной части 11''. В варианте осуществления на фиг. 14 вторая конструктивная часть 11'' может содержать внутреннюю секцию стрелы 14, другими словами, секцию стрелы 14, шарнирно соединенную с рамной частью 11, или, например, рамную часть 11. Изменение положения первой конструктивной части 11' относительно второй конструктивной части 11'' может быть детектировано, например, с помощью средств 22 детектирования.
Средства 22 детектирования, средства 21 обеспечения силы (не показаны) и/или средства 23 обработки данных (не показаны) могут быть выполнены с возможностью детектирования по меньшей мере наклона изменения силы изменяющейся величины, воздействующей на первую конструктивную часть 11', в данном случае на внешнюю секцию стрелы 14, рабочей машины 10. В первый момент времени, например, когда внешняя секция стрелы находится в положении 14а, сила первой величины может воздействовать на первую конструктивную часть 11', а именно на внешнюю секцию стрелы 14. Во второй момент времени, например, когда внешняя секция стрелы находится в положении 14b, сила второй величины может воздействовать на первую конструктивную часть 11', а именно на внешнюю секцию стрелы 14. Изменение величины силы может включать в себя разницу в величине между силой первой величины и силой второй величины.
В варианте осуществления на фиг. 7 сила первой величины может быть равна 0, если ствол 19 уложен на грунт, например, в первом положении стрелы. В варианте осуществления на фиг. 7 сила может быть обеспечена с помощью средств 21 обеспечения силы, например, с помощью одного или нескольких исполнительных элементов 9, таких как один или несколько цилиндров с рабочей средой под давлением, рабочей машины 10, с помощью по меньшей мере одной конструктивной части рабочей машины или, например, с помощью внешнего исполнительного элемента. Сила, обеспечиваемая по меньшей мере одной конструктивной частью рабочей машины, может представлять собой силу, вызванную весом конструктивной части, такой как, например, стрела 14.
Средства 23 обработки данных (не показаны) могут быть выполнены с возможностью определения состояния по меньшей мере одной конструктивной части рабочей машины, такой как наружная секция стрелы 14, шарнирное соединение, соединяющее наружную секцию стрелы 14 с внутренней секцией стрелы 14 или рамной частью 11, или шарнирное соединение, соединяющее стрелу 14 с рамной частью 11. Состояние может быть определено на основе изменения положения первой конструктивной части относительно второй конструктивной части в зависимости от детектированной силы.
Компьютерный программный продукт может храниться на машиночитаемом носителе и исполняться процессором. Компьютерный программный продукт может содержать машиночитаемый программный код, выполненный с возможностью осуществления этапов способа, изложенных выше, или их комбинации, при исполнении программного кода процессором. Процессор может содержать средства обработки данных рабочей машины.
Специалисту в данной области будет очевидно, что по мере развития технологии изобретательская концепция может быть реализована различными способами. Изобретение и его варианты осуществления не ограничены примерами, описанными выше, но могут варьироваться в пределах объема формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДЕТЕКТОРНЫЙ УЗЕЛ ДЛЯ ПЕРЕДВИЖНОЙ РАБОЧЕЙ УСТАНОВКИ | 2013 |
|
RU2638126C2 |
| ИЗМЕРИТЕЛЬ УГЛА НАКЛОНА С ПОСТОЯННЫМ МАГНИТОМ ДЛЯ ПРОМЫШЛЕННОЙ МАШИНЫ | 2012 |
|
RU2623679C2 |
| СПОСОБ ДЛЯ ИЗМЕРЕНИЯ УСИЛИЙ В ЗЕМЛЕРОЙНЫХ МАШИНАХ И УПРАВЛЕНИЯ ЭТИМИ МАШИНАМИ, И ЗЕМЛЕРОЙНАЯ МАШИНА, СОДЕРЖАЩАЯ ТАКУЮ СИСТЕМУ | 2019 |
|
RU2808023C2 |
| СИСТЕМА, СПОСОБ И ЗАЩИТНОЕ СНАРЯЖЕНИЕ ДЛЯ ЭЛЕКТРОННОГО УЧЕТА ОЧКОВ ДЛЯ ПРИМЕНЕНИЯ В БОЕВЫХ ИСКУССТВАХ | 2010 |
|
RU2541303C2 |
| АППАРАТ ДЛЯ ИНСЕКТИЦИДНОГО ОПРЫСКИВАНИЯ | 2019 |
|
RU2795590C2 |
| КОНТРОЛЛЕР ВРАЩАЮЩЕЙСЯ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2008 |
|
RU2431916C1 |
| СПОСОБ МОНИТОРИНГА И СИСТЕМА ДЛЯ ДЕТЕКТИРОВАНИЯ СКРУЧИВАНИЯ ВДОЛЬ КАБЕЛЯ, СНАБЖЕННОГО ИДЕНТИФИКАЦИОННЫМИ МЕТКАМИ | 2009 |
|
RU2518474C2 |
| КАТУШЕЧНАЯ КОНСТРУКЦИЯ ДЛЯ СИСТЕМЫ МАГНИТНО-РЕЗОНАНСНОЙ ТОМОГРАФИИ | 2019 |
|
RU2790472C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ДЕТЕКТИРОВАНИЯ ТОЛЩИНЫ ЛИСТОВОГО ДОКУМЕНТА | 2009 |
|
RU2507586C2 |
| САМОХОДНАЯ СЕЛЬСКОХОЗЯЙСТВЕННАЯ МАШИНА, СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ТАКОЙ МАШИНОЙ | 2013 |
|
RU2635930C2 |
Изобретение относится к рабочим машинам, а именно к определению состояния конструктивной части рабочей машины. Состояние по меньшей мере одной конструктивной части рабочей машины определяют путем детектирования силы изменяющейся величины, воздействующей на первую конструктивную часть или конструктивную часть, соединяющую первую конструктивную часть со второй конструктивной частью, определения изменения положения первой конструктивной части относительно второй конструктивной части в зависимости от детектированной силы и определения состояния на основе изменения положения первой конструктивной части относительно второй конструктивной части в зависимости от детектированной силы. Детектируют по меньшей мере наклон (крутизну) изменения величины силы. Технический результат заключается в том, чтобы свести к минимуму перерывы на техническое обслуживание и при этом более часто определять состояния, свести к минимуму риски незапланированных перерывов, вызванных изношенными и/или сломанными деталями, и даже риски травм, вызванных ими, могут быть сведены к минимуму. 4 н. и 20 з.п. ф-лы, 7 ил.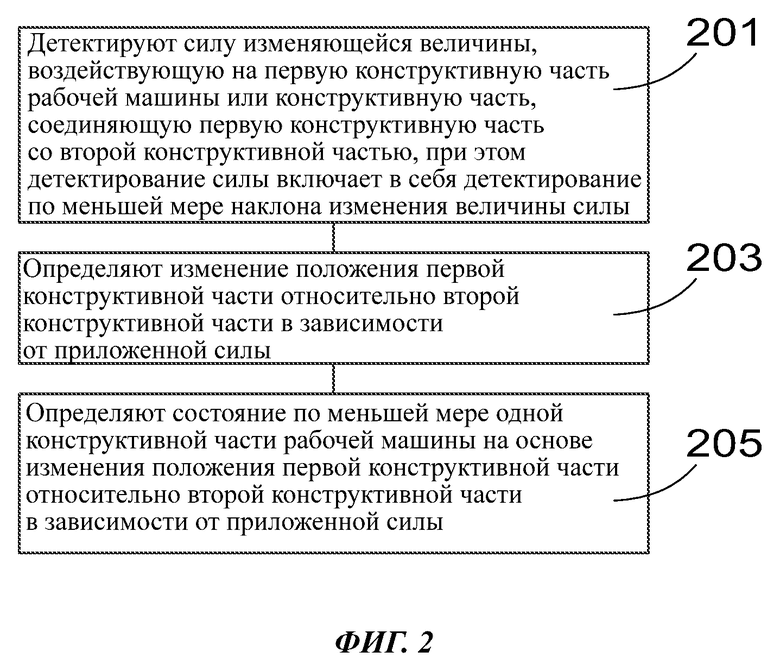
1. Способ определения состояния по меньшей мере одной конструктивной части рабочей машины, содержащей по меньшей мере две конструктивные части, первую конструктивную часть и вторую конструктивную часть, причем первая и вторая конструктивные части соединены друг с другом непосредственно или опосредованно, отличающийся тем, что включает в себя шаги:
детектируют силу изменяющейся величины, воздействующую на первую конструктивную часть рабочей машины или конструктивную часть, соединяющую первую конструктивную часть со второй конструктивной частью, при этом известен по меньшей мере наклон изменения величины силы,
определяют изменение положения первой конструктивной части относительно второй конструктивной части в зависимости от детектированной силы, и
определяют состояние по меньшей мере одной конструктивной части рабочей машины на основе изменения положения первой конструктивной части относительно второй конструктивной части в зависимости от детектированной силы,
причем определение состояния по меньшей мере одной конструктивной части включает в себя определение по меньшей мере одного из следующего: зазора в конструктивной части, зазора в шарнирном соединении (8) двух конструктивных частей, деформации конструктивной части, деформации шарнирного соединения (8) двух конструктивных частей, изгиба по меньшей мере одной конструктивной части и утечки в конструктивной части, и
при этом указанную силу прикладывают к первой конструктивной части посредством исполнительного элемента рабочей машины, по меньшей мере одной конструктивной части рабочей машины или посредством исполнительного элемента, внешнего по отношению к рабочей машине.
2. Способ по п. 1, отличающийся тем, что указанное состояние определяют для первой конструктивной части.
3. Способ по п. 1, отличающийся тем, что указанное состояние определяют для второй конструктивной части, которая отличается от первой конструктивной части, но находится в соединении с ней.
4. Способ по п. 1, отличающийся тем, что указанное состояние определяют для шарнирного соединения, соединяющего по меньшей мере две конструктивные части рабочей машины.
5. Способ по п. 4, в котором первая конструктивная часть содержит шарнирное соединение.
6. Способ по п. 4, в котором первая конструктивная часть представляет собой по меньшей мере одну из конструктивных частей, соединенных друг с другом с помощью шарнирного соединения.
7. Способ по п. 1, в котором состояние по меньшей мере одной конструктивной части определяют на основе углового коэффициента изменения положения первой конструктивной части в зависимости от детектированной силы.
8. Способ по п. 1, в котором состояние по меньшей мере одной конструктивной части включает в себя износ конструктивной части.
9. Способ по п. 1, в котором изменение положения первой конструктивной части определяют с помощью по меньшей мере одного из следующего: инклинометра, датчика ускорения, датчика углового ускорения, гироскопа, магнитометра, емкостного датчика расстояния, инерциального измерительного блока и оптического датчика.
10. Способ по п. 1, в котором изменение положения первой конструктивной части определяют посредством
определения по меньшей мере в одном направлении измерения по меньшей мере двух различных измеряемых переменных - первой и второй измеряемых переменных,
приема первого и второго измерительных сигналов, описывающих первую и вторую измеряемые переменные в средствах обработки данных, и
определения изменения положения первой конструктивной части на основе первой и второй измеряемых переменных.
11. Способ по п. 1, в котором силу прикладывают к первой конструктивной части посредством стрелы рабочей машины.
12. Способ по п. 1, в котором
устанавливают предварительно заданный интервал времени для определения состояния по меньшей мере одной конструктивной части.
13. Способ по п. 12, в котором дополнительно
определяют состояние по меньшей мере одной конструктивной части автоматически в предварительно заданный интервал времени при нормальном использовании рабочей машины.
14. Способ по по п. 1, дополнительно включающий в себя шаги, на которых
устанавливают контрольный предел для состояния по меньшей мере одной конструктивной части и
инициируют действие в ответ на определенное состояние, превышающее или находящееся ниже контрольного предела.
15. Способ по п. 14, в котором действие включает в себя по меньшей мере одно из следующих действий: инициирование сигнала тревоги, предусмотренного для оператора, и воздействие на работу рабочей машины.
16. Способ по п. 1, в котором одна из величин силы изменяющейся величины не содержит силы, прикладываемой к первой конструктивной части или конструктивной части, соединяющей первую конструктивную часть со второй конструктивной частью.
17. Устройство для определения состояния по меньшей мере одной конструктивной части рабочей машины, отличающееся тем, что содержит
средства детектирования, выполненные с возможностью определения изменения положения первой конструктивной части рабочей машины относительно второй конструктивной части, и
средства обработки данных, выполненные с возможностью определения состояния по меньшей мере одной конструктивной части рабочей машины на основе изменения положения первой конструктивной части относительно второй конструктивной части в зависимости от детектированной силы, при этом
средства детектирования, средства обработки данных и/или средства обеспечения силы выполнены с возможностью детектирования по меньшей мере наклона изменения величины силы изменяющейся величины, воздействующей на первую конструктивную часть, и определения изменения положения первой конструктивной части рабочей машины относительно второй конструктивной части в зависимости от детектированной силы.
18. Устройство по п. 17, дополнительно содержащее средства обеспечения силы, выполненные с возможностью приложения силы изменяющейся величины к первой конструктивной части рабочей машины, при этом известно по меньшей мере изменение величины силы.
19. Устройство по п. 18, в котором средства обеспечения силы содержат исполнительный элемент рабочей машины или по меньшей мере одну конструктивную часть рабочей машины.
20. Устройство по п. 17, в котором средства детектирования расположены неподвижно на рабочей машине.
21. Устройство по п. 17, в котором средства детектирования включают в себя средства детектирования, которые могут быть соединены с рабочей машиной и средствами обработки данных с возможностью отсоединения.
22. Устройство по п. 18, в котором средства обеспечения силы содержат внешний исполнительный элемент.
23. Рабочая машина, содержащая устройство по любому из пп. 17-22.
24. Машиночитаемый носитель, содержащий компьютерный программный продукт, отличающийся тем, что указанный продукт может быть исполнен процессором, причем указанный компьютерный программный продукт содержит машиночитаемый программный код, выполненный с возможностью инициирования устройства по любому из пп. 17-22 осуществлять указанные этапы способа, изложенные в любом из пп. 1-16 при его исполнении процессором.
| JP 2002181670 A, 26.06.2002 | |||
| US 8855943 B1, 07.10.2014 | |||
| US 9856967 B2, 02.01.2018 | |||
| Пластинчатая броневая покрышка для гибких трубчатых частей | 1930 |
|
SU27344A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ РАБОЧИХ ОРГАНОВ ЗЕМЛЕРОЙНЫХ МАШИН | 2010 |
|
RU2429459C1 |

