Область техники, к которой относится настоящее изобретение
Настоящее изобретение относится к области систем для землеройных машин. В частности, настоящее изобретение относится к системам и способам измерения усилий в землеройных машинах, к системам и способам управления такими машинами и к самим машинам. Землеройными машинами могут служить, например, экскаваторы, погрузчики для гражданского строительства и ведения горных работ, дноуглубительные суда или иные машины подобного рода.
Предшествующий уровень техники настоящего изобретения
Использование землеройных машин, таких как экскаваторы или погрузчики, которые предназначены для работы, например, на строительных площадках, для ведения горно-добычных работ, дноуглубительных работ и тому подобного, является обычным делом. Эти машины обычно снабжены землеройными орудиями (например, ковшами, лопатами, грунтозаборными устройствами и т.п.), в которых собирается материал. Землеройные орудия, например, ковши подвержены воздействию больших нагрузок и значительному износу, главным образом, в зоне, называемой режущей кромкой. Поэтому их режущие кромки обычно снабжены множеством предустановленных элементов, служащих для защиты режущей кромки и землеройных орудий от износа, а также для того, чтобы ковш лучше входил в грунт.
Эти защитные элементы включают в себя:
- зубья, обладающие функцией проникновения в грунт и защиты режущей кромки землеройных орудий;
штанги зубьев, обладающие функцией защиты режущей кромки и поддержки зубьев;
- передние щитки или экраны, обладающие функцией защиты козырька ковша в зонах, образуемых между зубьями, а также функцией проникновения, но в меньшей степени в сравнении с зубьями;
- боковые щитки или экраны, которые защищают боковые поверхности землеройных орудий; и
крепежные элементы, т.е. элементы, предназначенные для фиксации элементов износа между собой (например, для соединения зубьев со штангами зубьев) или для закрепления элементов износа на режущей кромке землеройных орудий (например, для прикрепления штанги зубьев к режущей кромке).
Все эти элементы подвергаются интенсивным механическим нагрузкам, большим деформирующим нагрузкам и сильному износу. Поэтому обычно их следует менять с определенной периодичностью, когда того требует степень их износа. В целом, эти защитные элементы обычно называются элементами износа или рабочими элементам землеройных орудий (GET).
Наиболее важными параметрами этих землеройных машин являются их надежность, производительность и высокий КПД (коэффициент полезного действия), т.е. затраты в расчете на единицу выбранного или загруженного материала и время безаварийной работы машины.
Важно обеспечить возможность измерения и расчета указанных механических нагрузок или усилий, которым подвергаются элементы износа, особенно во время наиболее ответственной части работы машины, которой обычно является выемка и загрузка материала, чтобы гарантировать производительность и эффективность работы машины. В наше время для того чтобы максимально точно определить возможные усилия, нагрузки и воздействия, которым могут подвергаться зубья и прочие элементы износа, проводятся теоретические исследования, предлагающие комплексные и сложные математические решения, приближенно отображающие реальные данные о местности.
Эти принятые в настоящее время решения включают в себя сложные варианты механического моделирования, носящие теоретический характер и приближенно отображающие общие динамические характеристики машины и ее функционирование, чтобы предложить наилучший критерий проектирования машины, особенно для конкретных ситуаций, таких как конкретное состояние грунта. Поскольку информация, предоставляемая этими имеющимися на данный момент решениями, носит теоретический характер, увязать ее с реальными земляными работами представляется сложной задачей. Более того, поскольку такое моделирование носит теоретический характер и лишь приближенно отображает реальную ситуацию, именно из-за отсутствия фактических и точных данных о нагрузках, которым подвергаются элементы GET, для минимизации риска преждевременного выхода из строя элементов GET вследствие нагрузок на известном уровне техники эти элементы проектируются с характеристиками прочности выше нормативных значений, например, с учетом максимального вырывного усилия машины, даже если во многих случаях усилие резания грунта не приближается к этому максимальному значению. Это, в свою очередь, приводит к уменьшению КПД земляных работ в сравнении с машиной, в которой элементы GET спроектированы с учетом реального уровня нагрузок, которым они должны будут подвергаться.
Другими попытками, предпринятыми в предшествующем уровне техники и направленными на изучение механических требований к землеройным машинам, являются, например, описанные в WO 2018/095536, WO 2015/077735, US 2018/0217108 и US 10011975.
Зная точные усилия, действующие на элементы GET, можно не только разместить на режущей кромке ковша элементы износа, наиболее подходящие для конкретных условий земляных работ, но также обеспечить следующее: определить, эффективно ли выполняются земляные работы, и повысить их КПД; снизить риск поломки элементов GET; спрогнозировать или более точно оценить срок службы элементов износа; и способствовать маневрированию или даже управлению машиной с тем, чтобы, к примеру, улучшить соотношение между затратами и объемом вынимаемого материала, снизить энергопотребление, продлить срок службы элементов износа и/или машины и т.д.
Более того, зная указанные усилия, можно также определить, каким будет ответное воздействие грунта на элементы GET во время работ по выемке и загрузке материала, т.е. можно получить информацию о том, как следует цеплять грунт. Для сравнения, простое определение реакции грунта на воздействие единичного элемента износа (или, например, ковша) не соответствует тому, как грунт будет реагировать на самом деле; и поэтому такой информации недостаточно, чтобы можно было определить, как следует выполнять работы по выемке и загрузке материала. Такая информация может быть полезной, как для работ, выполняемых в настоящее время, так и для адаптации элементов износа к указанным работам (или аналогичным работам, т.е. к работам в аналогичных условиях).
Соответственно, существует заинтересованность в создании систем и способов определения усилий, воздействий и/или нагрузок, которым подвергаются элементы износа землеройных машин, чтобы можно было уменьшить зависимость от гипотетических переменных величин из-за отсутствия исходных параметров и определить реакцию грунта на воздействие множества элементов износа. Также существует заинтересованность в создании систем и способов, содействующих оператору машины, или даже управляющих автономной машиной с учетом указанных усилий, воздействий и/или нагрузок, а также в создании таких машин.
Системы, способы и машины согласно настоящему изобретению предназначены для устранения указанных проблем.
Первый аспект настоящего изобретения относится к системе для землеройных машин, в частности, к землеройным орудиям (например, к ковшу, лопате, режущей головке или грунтозаборному устройству), причем эта система включает в себя: множество элементов износа, выполненных с возможностью соединения с режущей кромкой землеройных орудий землеройной машины; и один или несколько датчиков для измерения усилий (например, напряжений или однократных деформаций), причем каждый датчик из числа одного или нескольких датчиков установлен в одном элементе износа из числа множества элементов износа или между элементами износа из числа множества элементов износа.
Предложенная система представляет собой систему измерения усилий, которая позволяет измерять усилия в землеройных машинах (например, в экскаваторах, погрузчиках, дноуглубительных судах и т.п.) и, в частности, механические нагрузки или усилия, выдерживаемые элементами износа землеройных машин. Благодаря измерениям датчика/датчиков, т.е. сбором фактических данных в полевых условиях, можно избежать использования теоретических математических аппроксимаций при проектировании землеройных машин и их элементов износа или элементов GET; и, более того, их можно также избежать при эксплуатации таких машин с элементами износа, а получение полевых данных позволяет управлять работой машины.
Каждый датчик из числа одного или нескольких датчиков позволяет измерять изменение состояния одного или нескольких элементов износа вследствие механического воздействия или усилия, испытываемого указанным одним или несколькими элементами износа во время работы машины, и особенно (но не только) во время работ по выемке и загрузке материала, в ходе которых землеройные орудия (далее по тексту будет использован термин «ковш» в качестве эквивалента землеройным орудиям, хотя настоящее изобретение равным образом применимо и к другим землеройным орудиям, таким как лопаты, режущие головки или грунтозаборные устройства) входят в зацепление с грунтом, вследствие чего некоторые или все элементы износа контактируют с грунтом. В этом смысле указанный один или несколько элементов износа представляют собой, по меньшей мере, элемент износа, в котором располагается датчик, и в предпочтительном варианте с указанным элементом износа механически соединен один или несколько других элементов износа; в альтернативном варианте, когда датчик располагается между двумя элементами износа, указанный один или несколько элементов износа представляют собой один из указанных двух элементов износа, и с одним или обоими элементами износа механически соединены предпочтительно оба элемента износа, а более предпочтительно также один или несколько других элементов износа. Изменение состояния может быть обусловлено одним или несколькими следующими факторами: деформацией, давлением, нагрузкой, крутящим моментом, положением и т.п., и такие данные обрабатываются с целью определения фактической механической нагрузки или усилия, воздействию которого подвергается элемент/элементы износа, а также угла приложения усилия, воздействию которого подвергается элемент/элементы износа, за счет определения усилия по разным осям.
Множество элементов износа системы включает в себя любые элементы из числа таких элементов, как: зубья, штанги зубьев, щитки (передние и/или боковые), крепежные элементы (в виде, например, штифтов, скоб и т.п.) и их сочетания. В этом отношении в некоторых вариантах осуществления настоящего изобретения множество элементов износа включает в себя множество штанг зубьев, множество зубьев, множество щитков и множество крепежных элементов.
За счет размещения одного или нескольких датчиков в элементах износа датчик/датчики предоставляют более точные данные о каждом положении в отдельности в отличие от датчика/датчиков, размещенных в других конструктивных элементах машины (например, на ковше, козырьке ковша, стреле и пр.), которые не входят в непосредственный контакт с грунтом, т.е. в конструктивных элементах, отличных от элементов GET. Вследствие отсутствия зацепления таких других конструктивных элементов с грунтом по результатам измерений в этих элементах невозможно определить, какое усилие прикладывается к разным элементам износа. Следовательно, согласно таким измерениям, один единственный элемент износа может воспринимать все усилия, или некоторые усилия, или все усилия, и невозможно узнать, какие именно усилия он воспринимает. Кроме того, чем дальше датчик находится от места, где грунт прикладывает усилие к элементам износа, тем ниже напряжение вследствие приложения такого усилия и ниже чувствительность к направленности этого усилия, что делает невозможным измерение усилия, прикладываемого к элементам износа, и угла, под которым оно прикладывается. К примеру, напряжение вследствие усилия может превышать 1200 МПа на зубьях, составлять около 600 МПа на штангах зубьев и около 50 МПа или меньше на ковше за пределами его режущей кромки. И хотя значения усилия на зубьях и на штангах зубьев отражают усилие, прикладываемое к элементам износа, и его направленность, этого нельзя сказать в отношении ковша, не говоря уже о других элементах, отличных от ковша.
Система согласно настоящему изобретению предпочтительно спроектирована и изготовлена с учетом элементов износа разного типа в плане их размеров, формы и количества. Иначе говоря, для ковшей могут быть спроектированы и изготовлены разные комплекты элементов GET с учетом того, что в них должен быть установлен один или несколько датчиков для измерения усилий. Таким образом, системы согласно настоящему изобретению могут выпускаться серийно, что обеспечивает рентабельность их производства за счет возможности реализации этих систем на промышленном уровне. Это предпочтительно потому, что поскольку элементы GET должны время от времени заменяться, а некоторые элементы износа меняются чаще других, то также необходима замена датчиков и электроники системы, и поэтому их замена может производиться одновременно с заменой элементов износа с тем, чтобы сократить время простоя машины.
В некоторых вариантах осуществления настоящего изобретения один, некоторые или все датчики из числа одного или нескольких датчиков устанавливаются в одном элементе износа из числа множества элементов износа, а остальные датчики (ни один из них, один или некоторые) из числа одного или нескольких датчиков размещаются между двумя элементами износа из числа множества элементов износа. В некоторых вариантах осуществления настоящего изобретения один, несколько или все датчики размещаются между двумя элементами износа из числа множества элементов износа, а остальные датчики (ни один из них, один или некоторые) из числа одного или нескольких датчиков размещаются в одном элементе износа из числа множества элементов износа.
В некоторых вариантах осуществления настоящего изобретения каждый датчик из числа одного или нескольких датчиков представляет собой один из следующих типов датчиков: те изометрический датчик, манометр, датчик относительного перемещения, оптоволоконный щуп и пьезоэлектрический щуп. В некоторых из этих вариантов осуществления настоящего изобретения все датчики из числа одного или нескольких датчиков представляют собой датчики или щупы одного типа.
В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один датчик (или каждый датчик) из числа одного или нескольких датчиков устанавливается в полости, сформированной в соответствующем элементе износа, в которой размещается, по меньшей мере, один датчик (или каждый датчик).
В некоторых из этих вариантов осуществления настоящего изобретения, по меньшей мере, один датчик (или каждый датчик) устанавливается на стенке, ограничивающей полость.
В некоторых из этих вариантов осуществления настоящего изобретения один или несколько элементов износа из числа множества элементов износа, снабженных, по меньшей мере, одним размещенным в них датчиком, характеризуются продольной, поперечной и вертикальной осями; при этом один, несколько или все датчики в полости размещены на одной или нескольких стенках, ограничивающих эту полость вдоль ее поперечной или вертикальной оси (например, на боковых стенках); и/или один, несколько или все датчики в полости размещены на стенке, ограничивающей эту полость вдоль ее продольной оси (например, на передней стенке).
К примеру, один или несколько датчиков размещаются на передней стенке полости, которой в предпочтительном варианте осуществления настоящего изобретения является стенка полости вдоль продольной оси, располагающаяся ближе всего к краю множества элементов износа, входящих в контакт с грунтом (краю зубьев, которые должны контактировать с грунтом); при этом в необязательном варианте один или несколько датчиков размещаются на боковой стенке или боковых стенках полости. В другом примере один или несколько датчиков размещаются на боковой стенке или боковых стенках полости, а в необязательном варианте один или несколько датчиков размещаются на передней стенке полости. В некоторых примерах передней стенкой служит единственная стенка, ограничивающая полость вдоль продольной оси, что обусловлено наличием отверстия, образующим полость, которое располагается на противоположном конце полости вдоль ее продольной оси.
Благодаря размещению датчика/датчиков на передней стенке и/или на боковой стенке/боковых стенках результаты измерения усилий могут быть более точными в сравнении с результатами измерений, выполняемых с помощью датчиков, размещенных в других местах, что обусловлено распределением усилий в процессе земляных работ. Иначе говоря, обычно усилия распределяются среди множества элементов износа таким образом, что они сильнее воздействуют на стенки полости, и поэтому с помощью датчиков, размещенных в этих местах, можно получить более точные значения напряжений, воздействующих на элементы износа.
В некоторых вариантах осуществления настоящего изобретения одна, несколько или все полости, сформированные в элементах износа, снабжены одним или несколькими размещенными в них датчиками. В некоторых из этих вариантов осуществления настоящего изобретения количество датчиков, размещенных в полости, варьируется от трех до пяти.
В этих случаях предпочтение отдается схеме, согласно которой один или несколько датчиков размещены на передней стенке, а один или несколько датчиков размещены на боковой стенке или боковых стенках, что позволяет измерять усилия в разных точках полости. Это, в свою очередь, позволяет более точно определять усилия, воздействию которых подвергаются элементы износа, поскольку эти усилия прикладываются к стенкам полости неравномерно; напряжения или однократные деформации, измеренные с помощью датчиков, расположенных на противолежащих стенках, обычно сильно отличаются друг от друга в зависимости от того, какое усилие оказывает грунт на зубья во время работы машины. Измерение каждого из таких напряжений или однократных деформаций важно как для оптимизации конструкции элементов износа и самой машины, так и для оптимизации работы элементов износа и машины.
В некоторых вариантах осуществления настоящего изобретения одна или несколько полостей, сформированных в элементах износа, имеют конусную форму, причем в предпочтительном варианте указанные полости сходят на конус вдоль продольной оси соответствующего элемента/элементов износа. В некоторых из этих вариантов осуществления настоящего изобретения одна или несколько полостей выполнены более узкими на своем первом участке, который примыкает к первому краю соответствующего элемента износа, входящему в контакт с грунтом, в сравнении со вторым участком, который примыкает ко второму краю, противоположному первому краю.
В некоторых вариантах осуществления настоящего изобретения первая толщина t1 задается между наружной частью элемента износа и полостью (снабженной, по меньшей мере, одним датчиком) на первом участке полости, который примыкает к первому краю соответствующего элемента износа, входящего в контакт с грунтом, в отличие от второго участка, который примыкает ко второму краю, противоположному первому краю, а вторая толщина t2 задается между наружной частью элемента износа и полостью на втором участке, причем величина t1 меньше или равна величине t2 (и обе величины t1 и t2 превышают ноль). В некоторых из этих вариантов осуществления настоящего изобретения указанная полость (или полости) сформированы в элементе износа, который представляет собой зуб или штангу зуба.
В некоторых вариантах осуществления настоящего изобретения одна или несколько полостей или все полости, в которых располагается, по меньшей мере, один датчик, содержат элемент для защиты соответствующего, по меньшей мере, одного датчика или его управляющей электроники. В некоторых из этих вариантов осуществления настоящего изобретения этот элемент представляет собой или (дополнительно) содержит покрытие, например, силиконовое покрытие, смоляное покрытие или иное покрытие подобного рода. В некоторых из этих вариантов осуществления настоящего изобретения этот элемент представляет собой или (дополнительно) содержит твердотельный защитный элемент, например, пластину, которая может быть выполнена, например, из металла, такого как, например, сталь.
Усилия, прикладываемые к элементам износа во время работ по выемке и загрузке материала, обычно лежат в диапазоне сотен килоньютонов, и указанные усилия также прикладываются к любым элементам, входящим в состав элементов износа. Наличие защитных элементов в виде покрытий или твердотельных защитных элементов продлевает срок службы датчиков и любых сопряженных с ними компонентов, например, управляющей электроники согласно описанию, представленному ниже. В противном случае может случиться так, что один или несколько датчиков не смогут точно измерять напряжения или однократные деформации из-за своего смещения вследствие вхождения элементов износа в зацепление с грунтом; и возможно датчик/датчики могут вообще прекратить свое функционирование из-за механических нагрузок, которым подвергается один или несколько датчиков. Когда это происходит, элементы износа по-прежнему находятся в рабочем состоянии, но теперь больше невозможно измерять усилия, воздействию которых они подвергаются, и вследствие этого обслуживающий персонал или машина не в состоянии оценить, каково рабочее состояние элементов износа в данный момент времени, и эффективно ли осуществляется землеройная операция. Обе эти проблемы негативно влияют на работу машины в целом, поскольку невозможно определить состояние элементов износа на основании фактических данных, что может привести к их неожиданной поломке, в результате чего машина может прекратить свою работу; при этом обычно возрастают затраты в расчете на единицу объема перемещаемого материала, так как предоставляется меньше данных о землеройной операции, фиксирующих меньшее число неблагоприятных ситуаций.
В некоторых вариантах осуществления настоящего изобретения предложенная система дополнительно включает в себя управляющую электронику, сопряженную с одним или несколькими датчиками. В некоторых из этих вариантов осуществления настоящего изобретения управляющая электроника размещается в полости одного элемента износа из числа множества элементов износа, что упрощает передачу данных между датчиком/датчиками и управляющей электроникой, так как обмен данными может осуществляться по проводам или беспроводным способом, но с меньшими помехами из-за короткого расстояния между датчиками и управляющей электроникой и отсутствия или незначительного количества препятствий между ними. Наличие управляющей электроники упрощает передачу данных другим компонентам системы, таким как центральное средство управления, описанное ниже, или, например, характеристик машины в центр управления. Управляющая электроника предпочтительно снабжена модулем связи, включающим в себя антенну для беспроводной передачи и приема данных.
В некоторых вариантах осуществления настоящего изобретения предложенная система дополнительно включает в себя центральное средство управления для расчета усилия, воспринимаемого элементами износа, на основании результатов измерений (например, напряжений, однократных деформаций), выполняемых одним или несколькими датчиками. В некоторых из этих вариантов осуществления настоящего изобретения центральное средство управления коммуникативно связано с одним или несколькими датчиками и/или коммуникативно связано с управляющей электроникой (в тех вариантах осуществления, в которых система содержит указанную электронику). Коммуникационная связь осуществляется беспроводным образом, например, методом радиосвязи, но в некоторых вариантах осуществления коммуникационная связь осуществляется проводным образом; для этого центральное средство управления может быть снабжено модулем связи, включающим в себя антенну для беспроводной передачи и приема данных.
Центральное средство управления сконфигурировано в информационных целях для передачи уведомлений, например, оператору машины о том, превышает ли прикладываемое усилие заданное пороговое значение (например, заданное пороговое значение чрезмерного усилия), с последующим риском поломки рассматриваемого элемента или элементов износа; и/или о том, не находится ли прикладываемое усилие ниже оптимального рабочего уровня (например, заданного порога оптимального усилия), с обеспечением возможности выдерживать в дальнейшем большее усилие и, таким образом, возможности проведения земляных работ с приложением большего усилия. Оба этих типа уведомлений могут способствовать улучшению или оптимизации цикла выемки и загрузки материала с уменьшенным риском поломки рассматриваемого элемента или элементов износа или даже вообще без какого-либо непосредственного риска для них, поскольку последующие усилия будет измеряться повторно с помощью одного или нескольких датчиков; и, таким образом, последующие земляные работы, выполняемые машиной, будут отслеживаться на предмет выявления чрезмерного или неоптимального усилия, воздействию которого подвергается элемент/элементы износа, по мере того, как к ним прикладывается все большее вырывное усилие.
Центральное средство управления содержит один или несколько процессоров, один или несколько блоков памяти и модуль связи для приема данных с датчика/датчиков или управляющей электроники (или проводным, или беспроводным образом).
В некоторых вариантах осуществления настоящего изобретения центральное средство управления включает в себя, по меньшей мере, один процессор и, по меньшей мере, один блок памяти в расчете на один элемент износа, снабженный одним или несколькими датчиками, или в расчете на пару элементов износа с одним или несколькими датчиками, расположенными между ними. Каждый процессор из числа, по меньшей мере, одного процессора вычисляет усилие, воспринимаемое соответствующим датчиком/датчиками, на основании результатов выполненных ими измерений; таким образом, каждый отслеживаемый элемент износа имеет, по меньшей мере, один процессор для вычисления его усилий.
В некоторых вариантах осуществления настоящего изобретения центральное средство управления дополнительно выдает команды, по меньшей мере, на выполнение одной из следующих операций: регулирования усилия, прикладываемого машиной; изменение угла атаки землеройных орудий (и, таким образом, элементов GET); и изменение траектории движения землеройных орудий. Для этого центральное средство управления подает команды, исходя из того, превышает ли рассчитанное усилие заданное пороговое значение (например, заданное пороговое значение чрезмерного усилия), и/или, не находится ли рассчитанное усилие ниже оптимального рабочего уровня (например, ниже заданного порога оптимального усилия). Выдача команд может осуществляться с помощью, например, дополнительного одного или нескольких процессоров и дополнительного одного или нескольких блоков памяти, которые обрабатывают усилия, рассчитанные для каждого отслеживаемого элемента износа, и в этом случае разные процессоры передают рассчитанные усилия указанному дополнительному процессору/процессорам для их совместной обработки.
Центральное средство управления может содействовать оператору машины посредством выдачи команд на автоматическое внесение поправок, регулировку и коррекцию, по меньшей мере, одного усилия, прикладываемого машиной, угла атаки ковша и траектории движения ковша, помогая тем самым оператору осуществлять операции по выемке и загрузке грунта наиболее оптимальным и продуктивным образом, основываясь на пороговых значениях, заранее заданных в центральном средстве управления. Это, в свою очередь, предотвращает незапланированные остановы, что улучшает соотношение между затратами и объемом перемещаемого материала. Принцип, в соответствии с которым осуществляется внесение поправок, регулировка и коррекция, основан на прикладывании к ковшу меньшего или большего усилия при его заглублении в грунт (т.е. на цилиндры гидросистемы оказывается меньшее или большее давление); на изменении угла атаки, под которым ковш входит в контакт с грунтом во время выполнения землеройных и загрузочных работ; и/или на изменении траектории, по которой движется ковш во время выполнения землеройных и загрузочных работ; при этом последнее достигается за счет перемещения стрелы и рукояти машины.
Дополнительно или в альтернативном варианте указанный дополнительный один или несколько процессоров и один или несколько блоков памяти могут обрабатывать рассчитанные усилия для предоставления информации, касающейся работы элементов GET и, в необязательном варианте, также и машины.
Обработка, выполняемая центральным средством управления, предпочтительно предусматривает машинное обучение с тем, чтобы определять со все большей степенью точности состояние и функционирование элементов износа и, в необязательном варианте, также и машины, что - в свою очередь - обеспечивает возможность выдачи команд, лучше соответствующих реальной обстановке, в которой находятся элементы износа и машина. В этой связи центральное средство управления способно использовать статистические данные о работе элементов износа и/или машины за прошлые периоды, входные данные, получаемые от машины во время ее работы, и/или входные данные за прошлые периоды, и т.п.
В некоторых вариантах осуществления настоящего изобретения центральное средство управления рассчитывает усилие, воспринимаемое элементами износа, дополнительно основываясь на одном или нескольких видах входных данных машины (которые обычно предоставляются центральным органом управления машины, но могут также предоставляться блоками, собирающими все эти данные, которые генерируются в соответствующем компоненте или системе машины). Указанный один или несколько видов входных данных могут представлять собой один или несколько следующих видов входных данных: мощность, которую подает машина, вырывное усилие (BOF), энергопотребление, производительность гидросистемы машины и прочие данные, которые получает центральное средство управления через свой модуль связи. Центральное средство управления интерпретирует один или несколько видов входных данных вместе с рассчитанным усилием с тем, чтобы после завершения их обработки это средство управления могло выдать команды, которые, как было указано выше, автоматически настраивают, регулируют и корректируют прикладываемое усилие. В этой связи один или несколько видов входных данных машины могут обусловить коррекцию заданных пороговых значений; и, таким образом, одни и те же значения усилия в двух разных ситуациях могут давать в итоге разные выходные команды.
К примеру, когда вырывное усилие и/или энергопотребление превышает/превышают определенные значения, определяемые как чрезмерные и, соответственно, рассматриваемые как неприемлемые для работы машины, заданное пороговое значение чрезмерного усилия может быть уменьшено; таким образом, даже если значения усилия не представляются влекущими за собой риск поломки рассматриваемого элемента/элементов износа, работа машины в целом такова, что существует риск возникновения других проблем, например, сбоя в гидросистеме. Сводные данные, состоящие из одного или нескольких видов входных данных машины и значений усилия, могут быть обработаны центральным средством управления для внесения корректив в работу машины с помощью команд. В альтернативном варианте центральное средство управления может не корректировать заданные пороговые значения, исходя из одного или нескольких видов входных данных машины, а корректировать значения усилия на основании указанного одного или нескольких видов входных данных, например, путем внесения поправочного коэффициента в виде действительного числа, которое варьирует обработанные значения усилия, В обоих случаях могут быть получены аналогичные результаты.
Аналогичным образом центральное средство управления обрабатывает как один или несколько видов входных данных машины, так и значения усилий для выдачи команд, которые помогут оператору машины скорректировать работы по выемке и загрузке материала, что, как было указано выше, может обеспечить выполнение этих работ наиболее оптимальным и продуктивным образом и предотвратить незапланированные остановы, улучшая тем самым соотношение между затратами и объемом перемещаемого материала.
Когда центральное средство управления обрабатывает только значения усилия, и когда это средство использует как значения усилия, так и один или несколько видов входных данных машины, центральное средство управления организует оптимальную работу машины путем регулирования усилия, прикладываемого во время ее работы, в зависимости от обработанных данных в тем, чтобы в максимальной степени повысить КПД машины и производительность ее работы.
В контексте настоящего документа термин «вырывное усилие» используется взаимозаменяемо с терминами «прикладываемое усилие» и «усилие резания», обозначая усилие, прикладываемое к ковшу для вхождения в зацепление с грунтом.
В некоторых вариантах осуществления настоящего изобретения центральное средство управления сконфигурировано для коммуникационного сопряжения с центром управления характеристиками машины с целью предоставления информации с датчиков (после ее обработки центральным средством управления) в центр управления машины, что позволяет машине согласовывать эту информацию с фактическими данными, предоставляемыми центральным средством управления.
Благодаря связи между центральным средством управления и машиной в режиме реального времени машина способна интерпретировать данные и принимать решения на основании полученных показателей давления, усилия или нагрузки.
Если усилие или давление, измеренное датчиком/датчиками системы, дает в итоге рассчитанные значения усилия, которые превышают заданное пороговое значение (например, заданное пороговое значение чрезмерного усилия), которое обычно устанавливается с учетом механических свойств элементов износа (например, их сопротивления) и, в необязательном варианте, с учетом степени текущего износа, то центральное средство управления предпочтительно выполняет, по меньшей мере, одну из следующих операций: информирует оператора машины посредством одного или нескольких воспринимаемых сигналов (то, что обычно регулируется центром управления машины, в связи с чем центральное средство управления дает команду на выдачу такого сигнала или сигналов) о возможности неизбежной поломки рассматриваемых элементов износа, если не уменьшить прикладываемое вырывное усилие, и/или если не изменить угол атаки или траекторию движения ковша для уменьшения усилия, оказываемого на элементы износа; и выдает машине команду на уменьшение прикладываемого вырывного усилия или на изменение угла атаки или траектории движения ковша с тем, чтобы уменьшить вероятность поломки или даже предотвратить поломку элементов износа.
Если усилие или давление, измеренное датчиком/датчиками, меньше установленного оптимального уровня (например, заданного порога оптимального усилия) для указанных элементов износа, который обычно устанавливается, по меньшей мере, с учетом механических свойств элементов износа и степени текущего износа, если таковая известна, то центральное средство управления предпочтительно информирует оператора машины с помощью одного или нескольких воспринимаемых сигналов о возможности приложения большего усилия во время работы. Если центральное средство управления получает от машины один или несколько видов входных данных относительно ограничений и состояния компонентов машины, таких как двигатель, гидросистемы, передающие кабели и пр., а также о фактическом сопротивлении материалов машины, центральное средство управления может информировать оператора только тогда, когда этот один или несколько видов входных данных также указывают на возможность повышения вырывного усилия или изменения угла атаки или траектории движения ковша (что позволило бы существенно повысить прикладываемое усилие), не представляющего угрозы для машины; и поэтому, если по завершении обработки, как значений усилия, так и одного или нескольких видов входных данных центральное средство управления выявляет возможный риск при повышении прикладываемого усилия, тогда это средство предпочтительно не информирует оператора о возможности повышения вырывного усилия, или же это средство может проинформировать оператора о сложившейся ситуации, указав при этом, что оператор должен также учесть ограничения и состояние этих других компонентов, что центральное средство управления также делает, когда не получает указанный один или несколько видов входных данных. Еще один альтернативный вариант заключает в том, что центральное средство управления выдает машине команды на повышение прикладываемого усилия или изменение траектории движения или угла атаки ковша для повышения прикладываемого усилия и, таким образом, оптимизации работ по выемке и загрузке материала, что позволяет сократить цикл загрузки и повысить производительность работ в целом. Кроме того, в этом случае центральное средство управления может принять решение не выдавать такие команды, если после получения от машины одного или нескольких видов входных данных эти данные указывают на существование риска повреждения машины при повышении прикладываемого усилия,
С одной стороны, это позволяет уменьшить риск или воспрепятствовать выходу из строя системы (элементов износа, датчика или датчиков и пр.). Это предотвращает незапланированные остановы машины, которые стоят слишком дорого, поскольку они влияют на производительность горного предприятия, карьера или строительной площадки; а с другой стороны, это позволяет оптимизировать размеры элементов износа, находя оптимальный баланс между степенью проникновения в грунт зубьев меньшего размера без риска их поломки и увеличением количества проникающих зубьев с гарантией того, что они не поломаются, поскольку в случае приближения к критическим значениям напряжения машина получает соответствующую информацию и/или команды на уменьшение вырывного усилия, что обеспечивает повышение КПД земляных работ, увеличение производительности и снижение энергопотребления. Размеры элементов износа могут быть оптимизированы за счет непрерывного отслеживания рассчитываемых значений, поступающих от системы согласно настоящему изобретению, и - возможно -других параметров машины и/или выполняемой операции, таких как энергопотребление, соотношение между затратами и единицей объема перемещаемого материала, характеристики грунта и тому подобное; учитывая эти команды, например, когда должна быть выполнена последующая замена элементов износа, оператор может принять решение выполнить такую замену, но с использованием элементов износа другой формы (например, более длинных или коротких зубьев, более заостренных или более притупленных зубьев) или с использованием элементов износа других размеров, когда замене подлежат все элементы GET или штанги зубьев, причем оба эти варианта способствуют повышению эффективности работы. К примеру, когда к элементам износа может быть приложено дополнительное усилие, повысить эффективность работы могут более длинные и острые короткие зубья, тогда как, когда к элементам износа прикладывается чрезмерное усилие, эффективность работы могут повысить более короткие и широкие зубья.
Эта возможность предоставления машинам данных об элементах износа в режиме реального времени обеспечивает систему двойной связи, т.е. объединение в системе данных о самой машине (мощности, гидросистеме и т.п.) с данными, измеряемыми на местности. Такая обратная связь позволяет оператору машины получать фактические данные, что дает возможность принимать более взвешенные решения в процессе работ по выемке и загрузке материала. Более того, предложенная система может содействовать оператору путем автоматического внесения поправок, регулировки и коррекции прикладываемого усилия, облегчая работу оператора и делая ее более точной. Эта же система может функционировать в среде автономных машин без оператора в самой машине. Вне зависимости от того, используется ли дистанционно управляемая машина без водителя в кабине или автономная машина, предложенная система позволяет выполнять земляные работы с более высокой точностью и КПД, уменьшая вероятность или вообще предотвращая поломки элементов износа.
Повышение или уменьшение прикладываемого усилия предпочтительно означает, соответственно, повышение или уменьшение усилия, прикладываемого цилиндрами для перемещения ковша. Изменение угла атаки для повышения или уменьшения прикладываемого усилия предпочтительно означает изменение одного или нескольких углов, под которыми ковш входит в зацепление с грунтом, поскольку в зависимости от угла, под которым ковш входит в зацепление с грунтом, результирующее прикладываемое усилие может быть больше или меньше, даже тогда, когда не подаются никакие команды на повышение или уменьшение усилия, прикладываемого цилиндрами. Изменение траектории, по которой движется ковш для повышения или уменьшения прикладываемого усилия, предпочтительно означает изменение того, как ковш перемещается по всей траектории своего движения перед вхождением в зацепление с грунтом, поскольку в зависимости от того, как ковш перемещается для вхождения в зацепление с грунтом, результирующее прикладываемое усилие может быть больше или меньше, даже тогда, когда не подаются никакие команды на повышение или уменьшение усилия, прикладываемого цилиндрами.
В некоторых вариантах осуществления настоящего изобретения предложенная система дополнительно включает в себя машину, причем эта машина содержит центр управления, коммуникативно связанный с центральным средством управления.
Второй аспект настоящего изобретения относится к землеройной машине, содержащей: землеройные орудия; и систему согласно первому аспекту настоящего изобретения, причем множество ее элементов износа соединено с режущей кромкой землеройных орудий.
В некоторых вариантах осуществления настоящего изобретения указанная машина дополнительно включает в себя центр управления, предназначенный для управления машиной. Кроме того, в этих вариантах осуществления настоящего изобретения предложенная система содержит центральное средство управления, причем центральное средство управления коммуникативно связано с указанным центром управления; при этом центральное средство управления передает в центр управления выходные команды для управления машиной на основании, по меньшей мере, результатов измерений, выполненных одним или несколькими датчиками; а центр управления осуществляет управление машиной, по меньшей мере, на основании выходных команд, вследствие чего машина управляется, по меньшей мере, частично командами, выдаваемыми центром управления.
Предложенная система может функционировать в среде полуавтоматических машин (т.е. частично управляемых командами, выдаваемыми центром управления) и/или автоматических машин, т.е. содействуя оператору в осуществлении управления машиной или машиной с цифровым управлением без оператора внутри. Эта система обеспечивает возможность выполнения земляных работ с более высокой точностью и КПД, снижая вероятность внезапной поломки элементов износа и/или предотвращая такие поломки за счет интеграции данных, измеряемых системой, и данных, предоставляемых самой машиной. Кроме того, в полуавтоматической машине оператор может находиться внутри машины или на удалении от нее, т.е. в другом месте, откуда он может контролировать машину и управлять ее работой.
В некоторых вариантах осуществления настоящего изобретения указанная машина дополнительно содержит средство машинного зрения, первое средство для детектирования положения и ориентации стрелы машины, второе средство для детектирования положения и ориентации рукояти и третье средство для детектирования положения и ориентации землеройных орудий.
Средством машинного зрения может служить, по меньшей мере, одно из следующих устройств: камера/камеры; и система LIDAR (активный дальномер оптического диапазона). С помощью этого средства можно оценить окружающую среду и грунт и, соответственно, установить ориентацию машины и определить, каким образом элементы GET должны входить в зацепление с грунтом. Каждое средство из числа первого средства, второго средства и третьего средства содержит датчики, выполняющие измерения положения и ориентации стрелы, рукояти и ковша способом, известным на данном уровне развития техники, например, с помощью камеры/камер, радара, системы LIDAR и датчиков для измерения углов между их подвижными частями.
Помимо того, что центр управления коммуникативно связан с центральным средством управления, в предпочтительном варианте он коммуникативно связан (беспроводным образом) с пунктом управления, находящимся на удалении от машины, благодаря чему оператор может контролировать машину и управлять ее работой. Для этого пункт управления содержит одно или несколько средств предоставления информации пользователю, с помощью которых данные средства машинного зрения, первого, второго и третьего средств могут быть видны оператору.
Пункт управления дополнительно содержит одно или несколько средств пользовательского ввода для дистанционного управления машиной. Пункт управления передает команды пользователя в центр управления машины. Центр управления машины или исполняет команды после их получения, или обрабатывает команды на основании входных данных, полученных от центрального средства управления, и любых других входных данных машины. В последнем случае пользовательские команды подвергаются одному из таких видов обработки, как внесение поправок, регулировка и коррекция в соответствии с состоянием машины, с тем, чтобы, как было указано выше в привязке к первому аспекту настоящего изобретения, можно было содействовать оператору в осуществлении управления машиной благодаря данным, сгенерированным в машине.
Когда машина работает в автономном режиме, центр управления, по меньшей мере, использует данные с каждого средства из числа средства машинного зрения, первого средства, второго средства, третьего средства и центрального средства управления для ведения машины и управления стрелой, рукоятью и ковшом таким образом, чтобы выполнялись работы по выемке и загрузке материала, транспортировочные работы и разгрузочные работы. В этом смысле данные и/или команды, получаемые от центрального средства управления, обрабатываются центром управления с тем, чтобы можно было управлять стрелой, рукоятью и ковшом, поскольку эти данные показывают, как выполняются земляные работы, не является ли вырывное усилие чрезмерным или неоптимальным, и как ковш и его элементы износа входят в зацепление с грунтом.
Результаты измерений, получаемые от разных элементов износа, указывают на то, каким образом они входят в зацепление с грунтом, не только с точки зрения нагрузок на сами элементы износа, но и с точки зрения типа грунта, в зацепление с которым входят элементы износа. В отношении последнего можно сказать, что значения усилия могут указывать на особенности грунта (особенно, но не только, когда к этим значениям применяются методики машинного обучения), т.е. на то, что может повлиять на способ, которым осуществляется заглубление в грунт, и на тип и размеры элементов износа, необходимые для повышения эффективности земляных работ.
С помощью средства машинного зрения центр управления ведет машину, например, в карьере таким образом, чтобы она могла выполнять разные операции в рамках земляных работ, а также направляет машину в сторону грунта, в зацепление с которым она должна входить таким образом, чтобы расстояние между машиной и грунтом лежало в пределах значений расстояния, позволяющих ковшу достичь поверхности земли, и с углом атаки и траекторией движения ковша, заданных центром управления или центральным средством управления; в этом смысле средство машинного зрения может дополнительно содействовать выполнению работ благодаря данным, предоставляемым этим средством, которые относятся к поверхности земли (например, ее форме, как она изменяется при заглублении в грунт элементов GET и после извлечения из него ковша, и т.п.). При этом очевидно, что установленный угол атаки должен представлять собой угол, под которым ковш входит в зацепление с грунтом, и поэтому неправильная оценка расстояния между машиной и поверхностью земли может привести к тому, что ковш войдет в зацепление с грунтом под другим углом атаки. Аналогичным образом центру управления необходимо не только точно определить положение машины (в соответствии с тем, каким образом будет происходить заглубление в грунт), когда это касается расстояния, но он также должен правильно сориентировать машину для вхождения в зацепление с грунтом после получения соответствующей команды (или самой машины, или оператора, который в некоторых случаях помогает машине); следовательно, центр управления обрабатывает данные средства машинного зрения вместе с командами на заглубление таким образом, чтобы полуавтоматическая или автоматическая работа выполнялась надлежащим образом.
В некоторых вариантах осуществления настоящего изобретения центр управления осуществляет управление машиной, по меньшей мере, на основании выходных команд, благодаря чему машина полностью управляется командами, выдаваемыми центром управления (т.е. является автономной).
В некоторых случаях средство машинного зрения выполнено подвижным и/или поворотным, а центр управления осуществляет управление средством машинного зрения для изменения данных, которые оно получает с поверхности земли.
Третий аспект настоящего изобретения относится к автономной (т.е. безоператорной) землеройной машине согласно вариантам осуществления второго аспекта настоящего изобретения.
Четвертый аспект настоящего изобретения относится к способу, который предусматривает следующие стадии:
обеспечение наличия системы в землеройной машине, причем эта система включает в себя:
множество элементов износа, выполненных с возможностью соединения с режущей кромкой землеройных орудий землеройной машины; и
один или несколько датчиков для измерения усилий, причем каждый датчик из числа одного или нескольких датчиков располагается в одном элементе износа из числа множества элементов износа или между двумя элементами износа из числа множества элементов износа;
измерение усилий (например, в виде напряжений или однократных деформаций) одним или несколькими датчиками;
обработку результатов измерений, выполненных одним или несколькими датчиками, центральным средством управления для вычисления усилий на основании результатов измерений; и
определение центральным средством управления действия, которое должно быть выполнено, на основании рассчитанных усилий, что осуществляется следующим образом:
когда рассчитанные усилия превышают заданное пороговое значение чрезмерного усилия, предусмотрено, по меньшей мере, выполнение одного из следующих действий: выдачи предупреждения в форме, по меньшей мере, одного воспринимаемого сигнала, и автоматического уменьшения вырывного усилия землеройной машины; а
когда рассчитанные усилия меньше заданного порогового значения оптимального усилия, предусмотрено, по меньшей мере, выполнение одного из следующих действий: выдачи предупреждения в форме, по меньшей мере, одного воспринимаемого сигнала, и автоматического повышения вырывного усилия.
Предложенная система размещена на режущей кромке ковша землеройной машины, что позволяет получать фактические данные в отношении усилий, давления и/или нагрузок, воздействующих на элементы износа.
Во время выполнения земляных работ с помощью землеройной машины один или несколько датчиков измеряют напряжения или однократные деформации, испытываемые элементами износа. Центральное средство управления получает результаты измерений с одного или нескольких датчиков и обрабатывает их с тем, чтобы выдать предупреждение и/или изменить вырывное усилие машины в соответствии со значением усилий относительно заданных пороговых значений; при этом центральное средство управления может выдавать выходные команды, соответствующие любому из этих действий с тем, чтобы центр управления машины мог его выполнить. Для этого центральное средство управления снабжено одним или несколькими процессорами, одним или несколькими блоками памяти и модулем связи для приема данных с датчиков и, в необязательном варианте, с машины, а также для передачи данных на машину, например, в ее центр или блок управления, который управляет работой машины,
В некоторых вариантах осуществления настоящего изобретения повышение или уменьшение вырывного усилия предусматривает совершение, по меньшей мере, одного из следующих действий: соответственно, повышения и уменьшения давления, оказываемого на цилиндры гидросистемы машины; изменения угла атаки землеройных орудий с тем, чтобы, соответственно, повысить и уменьшить вырывное усилие; и изменения траектории, по которой движутся землеройные орудия с тем, чтобы, соответственно, повысить и уменьшить вырывное усилие.
В некоторых вариантах осуществления настоящего изобретения землеройная машина содержит центр управления, предназначенный для управления машиной; а указанное действие, определяемое центральным средством управления, представляет собой, по меньшей мере, одно из следующих действий: автоматическое уменьшение вырывного усилия землеройной машины в случае превышения рассчитанными значениями заданного порогового значения чрезмерного усилия; и автоматическое повышение вырывного усилия землеройной машины в случае, если рассчитанные усилия оказываются меньше заданного порогового значения оптимального усилия. Кроме того, в этих вариантах осуществления настоящего изобретения центр управления осуществляет управление машиной таким образом, что машина, по меньшей мере, частично управляется командами, выдаваемыми центром управления.
В некоторых вариантах осуществления настоящего изобретения предложенная машина содержит: средство машинного зрения, первое средство для детектирования положения и ориентации стрелы машины, второе средство для детектирования положения и ориентации рукояти и третье средство для детектирования положения и ориентации землеройных орудий. В некоторых из этих вариантов осуществления настоящего изобретения центр управления осуществляет управление машиной, по меньшей мере, на основании указанного действия, благодаря чему машина полностью управляется командами, выдаваемыми центром управления.
В некоторых вариантах осуществления настоящего изобретения предложенная система представляет собой систему согласно первому аспекту настоящего изобретения.
В некоторых вариантах осуществления настоящего изобретения предложенная машина представляет собой машину согласно второму или третьему аспекту настоящего изобретения.
Преимущества, аналогичные тем, которые описаны в рамках первого аспекта настоящего изобретения, также распространяются на второй, третий и четвертый аспекты настоящего изобретения.
Пятый аспект настоящего изобретения относится к способу, предусматривающему выполнение следующих стадий:
получение вычислительным устройством дробильной установки следующих данных:
значений усилия, прикладываемого к множеству элементов износа землеройной машины; или
данных, указывающих на характеристики материала, загружаемого с помощью землеройной машины;
определение вычислительным устройством характеристик материала на основании, по меньшей мере, значений усилия при получении указанных значений усилия; и
корректировка вычислительным устройством работы дробильной установки на основании, по меньшей мере, полученных или установленных характеристик материала.
Вычислительное устройство установки (именуемой дробилкой), которая осуществляет дробление материала, получаемого в ходе земляных работ, может обрабатывать значения усилия или данные с тем, чтобы конфигурировать дробильную установку в соответствии с характеристиками материала, подвергаемого дроблению. Вне зависимости от того, является ли материал однородным, неоднородным, уплотненным, скальным, рыхлым или неуплотненным, его твердость и прочие свойства являются важными составляющими информации для наладки дробильной установки максимально оптимальным образом с целью дробления материала с высокой скоростью и уменьшенным энергопотреблением.
После получения значений или данных, предпочтительно от системы согласно первому аспекту настоящего изобретения или машины согласно любому аспекту из числа второго и третьего аспектов настоящего изобретения, вычислительное устройство определяет характеристики материала (в случае получения значений усилия) и корректирует работу машины соответствующим образом; кроме того, в случае получения данных вычислительное устройство использует эти данные для соответствующей корректировки работы машины.
В некоторых вариантах осуществления настоящего изобретения корректировка работы дробильной установки предусматривает выполнение, по меньшей мере, одной из следующих операций: изменения ее усилия; изменения ее оборотов; и регулировки ее конуса.
Краткое описание фигур
Для завершения описания и обеспечения более глубокого понимания настоящего изобретения предусмотрен комплект чертежей. Указанные чертежи образуют неотъемлемую часть описания и иллюстрируют варианты осуществления настоящего изобретения, которые не должны рассматриваться как ограничивающие его объем, а служат лишь примерами того, каким образом может быть осуществлено настоящее изобретение. Чертежи содержат фигуры, описанные ниже, где:
На фиг.1-3 проиллюстрированы системы согласно разным вариантам осуществления настоящего изобретения, которые представлены в виде блок-схем.
На фиг.4 и 5 представлено перспективное изображение и вид сбоку в продольном разрезе части системы согласно одному из вариантов осуществления настоящего изобретения, включающей в себя зуб с датчиками; причем на фиг.5 также показаны векторы усилий вследствие использования землеройной машины, снабженной указанной системой.
На фиг.6 показан вид сбоку в продольном разрезе системы согласно одному из вариантов осуществления настоящего изобретения, включающей в себя узел, состоящий из зуба и штанги зуба с датчиками.
На фиг.7 показан вид сверху в продольном разрезе системы согласно одному из вариантов осуществления настоящего изобретения, включающей в себя узел, состоящий из зуба и штанги зуба с датчиками.
На фиг.8 показан вид сбоку в продольном разрезе системы согласно одному из вариантов осуществления настоящего изобретения, включающей в себя штангу зуба с датчиками.
На фиг.9 показан вид сбоку в продольном разрезе системы согласно одному из вариантов осуществления настоящего изобретения с датчиками, по меньшей мере, внутри штанги зуба.
На фиг.10А-10 В и 11А-11 В представлены перспективные изображения сечений систем согласно вариантам осуществления настоящего изобретения с датчиками, по меньшей мере, внутри штанг зуба.
На фиг.12 схематически показан датчик для систем согласно одному из вариантов осуществления настоящего изобретения.
На фиг.13 показан вид сбоку в продольном разрезе системы согласно одному из вариантов осуществления настоящего изобретения с датчиками между элементами износа.
На фиг.14 представлено перспективное изображение части системы согласно одному из вариантов осуществления настоящего изобретения с датчиками, по меньшей мере, внутри штанги зуба.
На фиг.15-17 представлены перспективные изображения частей систем согласно одному из вариантов осуществления настоящего изобретения с крепежными элементами в виде скоб, снабженных датчиками.
На фиг.18А-18В с разных ракурсов показана система согласно одному из вариантов осуществления настоящего изобретения, снабженная датчиками, которые расположены в полости штанги зуба; а на фиг.18С показан блок с датчиками, показанными на фиг.18В.
На фиг.19А и 19В представлены перспективные изображения штанги зуба и самого зуба системы согласно настоящему изобретению с датчиками, расположенными, по меньшей мере, в части штанги зуба, входящей в гнездо зуба.
На фиг.20 показан график, иллюстрирующий измерение усилия с помощью датчика, расположенного на ковше землеройной машины.
На фиг.21 показан график, иллюстрирующий множество результатов измерений усилия, выполненных датчиками, которые установлены на цилиндре в стреле машины.
На фиг.22А-22В представлены графики, иллюстрирующие значения усилий двух зубьев системы согласно одному из вариантов осуществления настоящего изобретения.
На фиг.23А-23Е представлены графики, иллюстрирующие усилия и углы вхождения ковша, вычисленные путем обработки результатов измерений системы согласно одному из вариантов осуществления настоящего изобретения.
На фиг.24 показан оператор, дистанционно управляющий землеройной машиной, снабженной системой согласно одному из вариантов осуществления настоящего изобретения.
На фиг.25А-25С приведены разные примеры усилия, оказываемого на ковш, или углы атаки после расчетов, выполненных системами согласно вариантам осуществления настоящего изобретения.
На фиг.26А и 26В представлены графики, иллюстрирующие два режима работы систем согласно вариантам осуществления настоящего изобретения.
На фиг.27 приведен пример обработки данных центральным средством управления систем согласно вариантам осуществления настоящего изобретения, который представлен в виде блок-схемы.
На фиг.28 проиллюстрирован способ согласно настоящему изобретению в виде блок-схемы.
На фиг.29-32 приведены примеры способов коррекции работ по выемке и загрузке материала, выполняемых землеройной машиной.
Подробное раскрытие настоящего изобретения
На фиг.1 показана система 1 согласно вариантам осуществления настоящего изобретения. Система 1 включает в себя множество элементов 10 износа, выполненных с возможностью соединения с режущей кромкой ковша землеройной машины. Множество элементов 10 износа включает в себя, по меньшей мере, зубья 11, штанги 12 зубьев, крепежные элементы 13 и 14 и передние и/или боковые щитки 15, причем разные примеры некоторых из этих элементов износа описаны ниже в привязке к другим фигурам.
Система 1 также включает в себя один или несколько датчиков 20, которые располагаются в одном элементе износа (или прикреплены к его поверхности, или закреплены в полости, образованной в элементе износа) из числа множества элементов 10 износа; или же они располагаются между двумя элементами износа (или закреплены в пространстве между их поверхностями, или закреплены в полости, образованной между двумя элементами износа) из числа множества элементов 10 износа. К примеру, система 1 может содержать тридцать датчиков 20, пятнадцать из которых располагаются таким образом, чтобы в каждом зубе 11 из числа пяти зубьев находилось по три датчика, а остальные пятнадцать датчиков 20 располагаются таким образом, чтобы в каждой штанге 12 зуба из числа пяти штанг зубьев находилось по три датчика.
Каждый датчик в одном из элементов износа проводит измерения для расчета значений усилия по одной из осей; таким образом, на один элемент износа приходиться, по меньшей мере, три датчика для расчета усилий по всем трем осям.
Датчик/датчики 20 выполнены с возможностью измерения усилий, когда они располагаются в элементах износа или между ними; например, датчик/датчики способны измерять напряжения или однократные деформации, связанные с усилием, которое прикладывается к элементам износа.
На фиг.2 показана система 2 согласно некоторым вариантам осуществления настоящего изобретения. Система 2 включает в себя множество элементов 10 износа, один или несколько датчиков 20, а также как управляющую электронику 40, так и центральное средство 50 управления.
Управляющая электроника 40 коммуникативно связана как с одним или несколькими датчиками 20 (посредством проводной или беспроводной связи), так и с центральным средством 50 управления (посредством проводной или беспроводной связи, при этом в предпочтительном варианте центральное средство 50 управления не располагается в одном элементе износа или между элементами износа, а находится за пределами элементов износа; и, соответственно, в этих случаях связь предпочтительно осуществляется беспроводным образом) с тем, чтобы предоставлять результаты измерений датчиков 20 центральному средству 50 управления с помощью модуля связи (не показан). Каждый датчик 20 может характеризоваться наличием соответствующей управляющей электроники 40, или же несколько датчиков, расположенных в одном и том же элементе 10 износа или между элементами 10 износа, могут характеризоваться наличием одного или нескольких общих блоков управляющей электроники 40. Управляющая электроника 40 получает результаты измерений, переводит их в цифровую форму с помощью аналого-цифрового преобразователя и выдает поток данных с результатами измерений после их оцифровки или обработки; например, управляющая электроника 40 может применять цифровой фильтр для отфильтровывания помех в результатах измерений.
В расчете на каждый датчик центральное средство 50 управления предпочтительно содержит, по меньшей мере, один процессор 51, по меньшей мере, одну память 52 и модуль 53 связи. Центральное средство 50 управления получает результаты измерений от управляющей электроники 40 и обрабатывает их с тем, чтобы рассчитать значения усилий, воздействующих на элементы 10 износа. С помощью модуля 53 связи эти значения могут быть затем переданы в центр управления машины, включающий в себя систему 2 для информирования оператора об усилиях, прикладываемых к элементам 10 износа во время выполнения земляных работ, чтобы тот на основании этих знаний мог принимать решения в отношении того, каким образом управлять работой машины, могут ли разные элементы износа больше походить для выполнения земляных работ, и/или существует ли риск выхода из строя элементов износа и целесообразна ли их замена. Центр управления может также обрабатывать полученные значения усилий для выдачи команд, по меньшей мере, на основании этих значений.
Кроме того, благодаря наличию, по меньшей мере, одного процессора 51, центральное средство 50 управления способно предоставлять команды, например, на выдачу одного или нескольких воспринимаемых пользователем сигналов, указывающих на состояние элементов 10 износа или рекомендуемый уровень вырывного усилия после его определения, по меньшей мере, одним процессором 51 с использованием результатов измерений и/или команд с тем, чтобы, например, осуществлять управление или содействовать управлению машиной, которая имеет в своем составе систему 2, изменяя вырывное усилие, угол атаки ковша машины и/или траекторию движения, по которой движется ковш машины. Центральное средство 50 управления передает такие команды в центр управления машины, который - в свою очередь - может исполнять команды после их получения от средства 50, или же обрабатывать и модифицировать их в соответствии с результатами измерений, полученными центром управления от других компонентов машины.
Для предоставления команд центральным средством 50 управления это средство 50 может также получать от машины (например, из центра управления или от его разных блоков) один или несколько видов входных данных, касающихся состояния других компонентов машины. Соответственно, процессор/процессоры 51 средства 50 обрабатывают один или несколько видов таких входных данных вместе с рассчитанными значениями усилий и выдают команды, опираясь на оба эти источника данных.
Для расчета усилий предусмотрен набор уравнений, описывающих механические свойства считываемого элемента, который хранится, по меньшей мере, в одном блоке памяти 52 центрального средства 50 управления, выдающего значения усилий после получения значений напряжений или однократных деформаций. Этот набор уравнений опирается на законы физики и предпочтительно задает условия статического равновесия таким образом, чтобы и суммы усилий были равны нулю, и суммы моментов были равны нулю, как известно в данной области техники. Поскольку в этой ситуации элемент износа находится в состоянии равновесия, не смещается и не деформируется, то этот элемент износа обладает заданной жесткостью, которая может быть смоделирована методами численного моделирования, после чего коэффициенты в уравнениях, которые соотносят напряжения и однократные деформации с усилиями, воздействующими на элемент износа, калибруются посредством экспериментальных испытаний с тем, чтобы прийти к значениям коэффициентов, которые позволят получить точные значения усилий на основании результатов измерений. Таким образом, указанные значения коэффициентов калибруются с учетом положения датчиков в элементах износа и количества используемых датчиков после установки системы в ковше машины.
Система 2 также содержит одно или несколько устройств 25 электропитания, таких как одна или несколько аккумуляторных батарей, предназначенных, по меньшей мере, для подачи питания на управляющую электронику 40. Предпочтительно, но не обязательно, одно или несколько из указанных устройств 25 электропитания расположены в элементах 10 износа; таким образом, всякий раз при замене элементов 10 износа также заменяются датчики 20, управляющая электроника 40 и устройство/устройства 25 электропитания.
В предпочтительном варианте одно или несколько устройств 25 электропитания располагаются в одном и том же месте центрального средства 50 управления, подавая на него питание. Центральное средство 50 управления предпочтительно располагается за пределами элементов 10 износа (где много свободного пространства и, таким образом, можно разместить дополнительные процессоры, блоки памяти и устройства электропитания), например, в кабине машины, В этих случаях центральное средство 50 управления может также запитываться от источника питания самой машины.
В некоторых вариантах осуществления настоящего изобретения датчик/датчики 20 могут быть снабжены встроенной управляющей электроникой 40 для уменьшения габаритов датчиков и управляющей электроники; например, датчик/датчики 20 могут быть снабжены встроенным аналого-цифровым преобразователем и модулем связи. Это может иметь место в том случае, если требуется максимальная минимизация пространства (в элементах износа или между ними) для размещения датчика/датчиков 20 и управляющей электроники 40, в которое должны вписаться указанные компоненты. Следует понимать, что данные, которые могут быть предоставлены системой 2, позволяют подогнать (например, по размерам, форме, количеству и прочим параметрам) элементы износа под условия, с которыми сталкивается машина, чтобы можно было уменьшить размеры элементов износа и, таким образом, избежать конструкции с характеристиками прочности выше нормативных значений, вследствие чего пространство для размещения датчика/датчиков 20 и управляющей электроники 40 становится более ограниченным.
На фиг.3 показана система 3 согласно некоторым вариантам осуществления настоящего изобретения. Система 3 включает в себя множество элементов 10 износа, один или несколько датчиков 20, одно или несколько устройств 25 электропитания, управляющую электронику 40 и центральное средство 50 управления. Система 3 также включает в себя машину 100 с ковшом 110 и центром 150 управления этой машиной. Центр 150 управления снабжен, по меньшей мере, одним процессором 151, по меньшей мере, одним блоком памяти 152 и модулем 153 связи для беспроводной и/или беспроводной передачи и приема данных. Ковш 110 соединен с рукоятью 108, которая - в свою очередь - соединена со стрелой 106.
В некоторых вариантах осуществления настоящего изобретения, например, в варианте, показанном на фиг.3, машина 100 является полуавтоматической, т.е. управляемой оператором с задействованием, по меньшей мере, центрального средства 50 управления и центра 150 управления, или автоматической, т.е. управляемой центральным средством 50 управления и центром 150 управления; и она содержит средство 120 машинного зрения, первое средство 125 для детектирования положения и ориентации стрелы 106, второе средство 130 для детектирования положения и ориентации рукояти 108 и третье средство 135 для детектирования положения и ориентации ковша 110. Центр 150 управления может управлять каждым из следующих узлов: средством перемещения (не показано) машины 100 с помощью средства 120 машинного зрения, стрелой с помощью первого средства 125, рукоятью с помощью второго средства 130 и ковшом 110 с помощью третьего средства 135; кроме того, центральное средство 50 управления передает в центр 150 управления команды на коррекцию вырывного усилия, угла атаки ковша 110 или траектории движения ковша (причем каждый из этих параметров может корректироваться путем манипулирования стрелой и/или ковшом 110), и/или для информирования оператора (если таковой имеется) машины 100 путем выдачи команд на предоставление воспринимаемых пользователем сигналов или передачу данных, отражающих: состояние элементов 10 износа, рассчитанные значения усилий, возможные изменения вырывного усилия, угла атаки и/или траектории на основании расчетов, выполненных центральным средством 50 управления, и т.п. Для этого центр 150 управления или передает данные, например, на удаленную станцию с помощью модуля 153 связи, или выдает воспринимаемые пользователем сигналы с помощью средств представления данных (не показаны) машины 100, например, экрана, динамиков, светодиодов, вибрирующих устройств и пр.
На фиг.4 показана часть зуба 11 (где гнездо 19, показанное на фиг.5, не отображено), используемого в качестве элемента износа системы согласно одному из вариантов осуществления настоящего изобретения, тогда как на фиг.5 зуб 11 показан полностью. Зуб 11 характеризуется наличием первого конца 31 (именуемого в дальнейшем передней частью), выполненного с возможностью вхождения в зацепление с грунтом во время копания, как известно в данной области техники, и второго конца 32 (именуемого в дальнейшем задней частью), выполненного с возможностью приема штанги зуба (как это показано, например, на фиг.6-7), которая удерживает зуб 11 с тем, чтобы тот оставался прикрепленным к ковшу землеройной машины (как это показано, например, на фиг.25А-25С).
Зуб 11 содержит полость 16а, сформированную на стороне второго конца 32, т.е. на той стороне, где располагается штанга зуба. Полость 16а представляет собой область, открытую с указанной стороны, причем указанная область остается свободной со стороны штанги зуба после его прикрепления, т.е. штанга зуба после ее установки не доходит до указанной полости 16а. В указанной полости 16а располагается один или несколько датчиков 20а-20b, предназначенных для измерения усилий, воздействию которых подвергается зуб 11, причем наиболее значительные из них обычно возникают во время выполнения операций копания и загрузки, при которых, в идеальном варианте, первый конец 31 входит в зацепление с грунтом, т.е. тех усилий, которые в конечном счете зависят от следующих факторов: усилия резания грунта, траектории движения ковша, угла атаки ковша, схемы расположения элементов износа на ковше и геометрии элементов износа,
В этом варианте осуществления настоящего изобретения в полости 16а располагаются четыре датчика 20а-20b, два из которых не видны из-за ракурса зуба 11. Четыре датчика 20а-20b размещены таким образом, что каждый из них закреплен на одной из стенок, ограничивающих полость 16а относительно показанных осей Y и Z; в этом смысле измерение усилия предпочтительно проводится в точке, которая располагается максимально близко к точке приложения усилия. При размещении датчиков в этих точках напряжения или однократные деформации, которые испытывает зуб 11, могут измеряться на значительном отрезке структуры зуба 11, так как величина и составляющие напряжений или однократных деформаций на одной из сторон обычно отличаются от величины и составляющих напряжений или однократных деформаций на другой стороне. Это, в свою очередь, дает больший объем фактических данных, которые могут быть использованы для расчета усилия, прикладываемого к зубу 11 (или иному элементу износа в тех вариантах осуществления настоящего изобретения, в которых датчик или датчики располагаются в другом элементе износа).
В других вариантах осуществления настоящего изобретения один или несколько датчиков или каждый датчик 20а-20b размещены на стенке, ограничивающей полость 16а относительно показанной оси X; причем указанная стенка обычно выполнена плоской, что упрощает закрепление на ней датчиков.
В качестве одного или нескольких датчиков 20а-20b используются, например, тензометрические датчики, которые могут быть плоскими или цилиндрическими, манометры, датчики относительного перемещения, оптоволоконные щупы, пьезоэлектрические щупы или датчики давления.
Как известно в данной области техники, в соответствии с законом Гука силовое напряжение и электрическое напряжение взаимосвязаны, поскольку оба эти напряжения обладают своей собственной линейной пропорциональностью, которая может определяться и связываться математически при одной и той же постоянной пропорциональности. Таким образом, при заданной деформации датчиков 20а-20b, таких как, например, тензометрические датчики, электрическое напряжение изменяется, благодаря чему можно определить усилие, воспринимаемое зубом 11, с учетом калибровки.
Исключительно во избежание двусмысленного толкования ось X далее по тексту будет называться аксиальным или продольным направлением, ось Y будет называться боковым или поперечным направлением, а ось Z будет называться вертикальным направлением; при этом совершенно очевидно, что эти оси и их названия могут быть определены иным образом без отступления от объема настоящего изобретения.
Как показано на фиг, 5, зуб 11 имеет полость 16а, соединенную с гнездом 19, в которое входит часть штанги зуба после ее прикрепления к зубу 11. Как было указано выше, в полости 16а располагаются четыре датчика 20a-20d (один из датчиков 20d перекрывает другой датчик 20b, что обусловлено ракурсом отображения сечения), которые закреплены на ее стенках, в частности, на боковых стенках, тогда как в других вариантах осуществления настоящего изобретения один, несколько или все датчики располагаются на передней стенке (т.е. на стенке, которая находится ближе всего к первому концу 31 и ограничивает полость 16а в аксиальном направлении).
Полость 16а имеет конусную форму, вследствие чего она сужается в направлении части полости 16а, которая находится ближе к первому концу 31 (что проиллюстрировано стрелкой w1, обозначающей ширину), т.е. к передней части полости, чем второй конец 32 (что проиллюстрировано стрелкой w2, обозначающей ширину), причем первая толщина, заданная между наружной частью зуба 11 и полостью 16а, будет больше в передней части, чем в задней части (что проиллюстрировано стрелками t1 и t2, обозначающими толщину).
Может быть предусмотрена такая геометрия полости 16а, сформированной в зубе 11 (или сформированной в другом элементе износа, что будет описано ниже), которая учитывает как деформацию, так и электрическое напряжение, и поэтому измерения могут быть достаточно чувствительными, но вместе с тем не чрезмерно чувствительными, чтобы их нельзя было спутать с электронным шумом. Соответственно, геометрия полости 16а также обеспечивает достаточную жесткость, чтобы выдерживать рабочие напряжения, характерные для земляных работ, не превышая при этом максимальный предел деформации, при котором датчики 20а-20b могли бы быть повреждены вследствие деформации, что сделало бы невозможным проведение измерений (это происходит при превышении упругой области материалов, из которых изготовлены датчики 20a-20d, в результате чего они бы постоянно деформировались). Кроме того, геометрия гнезда 19 может быть модифицирована в отношении гнезд без сформированной в ней полости с тем, чтобы точки контакта были постоянными; в этом случае расстояние между точкой приложения усилия и точкой приложения реакции не изменяется, поскольку в противном случае это могло бы стать источником погрешностей при измерениях, снижающих точность усилий, рассчитанных на основании измерений.
В предпочтительном варианте датчик/датчики располагаются на участках стенок, толщина которых по существу одинакова, что обеспечивает повышенную точность и стабильность измерений.
На фиг.6 показана система согласно одному из вариантов осуществления настоящего изобретения, которая помимо датчиков (не показаны) содержит центральное средство 50 управления и управляющую электронику 40, размещенные в полости 16а, сформированной в зубе 11.
В этом примере штанга 12 зуба показана прикрепленной к зубу 11 после захождения в гнездо зуба 11. На фиг.7 можно также видеть штифт 14, скрепляющий штангу 12 зуба с зубом 11. Несмотря на то, что штанга 12 зуба входит в зуб 11, можно видеть, что полость 16а свободна от штанги 12 зуба (на что указывают штрихпунктирные линии), и поэтому в ней могут быть размещены компоненты для измерения усилий.
Управляющая электроника 40 соединена с датчиками или беспроводным, или проводным образом, и передает сигналы или посредством беспроводной связи, или по кабелю центральному средству 50 управления, которое в этом варианте осуществления настоящего изобретения располагается за пределами элементов 11-12 износа (например, в кабине машины 100). Сигналы содержат результаты измерений датчиков, расположенных в полости 16а, и поэтому данные об усилии или давлении, которое воздействует на зуб 11, могут поступать в режиме реального времени.
На основании этих измерений центральное средство 50 управления рассчитывает значения усилий, и благодаря наличию связи между машиной 100 (например, ее центром управления) и управляющей электроникой 40 или датчиками машине 100 могут быть переданы любые команды 55, сгенерированные центральным средством 50 управления, для управления работой машины и/или для информирования ее оператора о любых решениях, принятых центральным средством 50 управления. Кроме того, центральное средство 50 управления может передавать данные на датчики или их управляющую электронику 40 для выдачи команд, например, на активацию или деактивацию измерений, коррекцию частоты съема данных или скорости передачи данных и т.п.
Для предотвращения случайного повреждения управляющей электроники 40 и/или датчиков в полости 16а предпочтительно предусмотрен один или несколько элементов для их защиты, изолирующих компоненты внутри полости 16а с целью предотвращения попадания внутрь влаги, воды и грязи. Для этого в указанной полости 16а размещается защитный элемент в виде твердой пластины 70, выполненной, например, из металла, такого как сталь; и/или же полость 16а покрывается защитным материалом, таким как силикон или смола, который полностью или частично заполняет собой любое свободное пространство в полости 16а. Более того, управляющая электроника может размещаться в защитном корпусе, устойчивом к ударам и не допускающим попадание внутрь твердых частиц, что могло бы повлиять на ее надлежащее функционирование.
На фиг.7 показан вид сверху системы согласно одному из вариантов осуществления настоящего изобретения, аналогичной той, которая проиллюстрирована на фиг.6, и в которой зуб 11 характеризуется иной геометрией, а сформированная в нем полость 16b не сходит на конус, а ее боковые стенки (т.е. те стенки, которые ограничивают полость 16b относительно оси Y) имеют одинаковую толщину. На этом виде сверху штифт 14, механически соединяющий штангу 12 зуба с зубом 11, виден лучше, чем на фиг.6.
Зубья 11 и штанги 12 зубьев системы, показанной на фиг.6-7, имеют такие размеры, что штанга 12 зуба предпочтительно приваривается к режущей кромке ковша (не показана).
На фиг.8 показана система согласно одному из вариантов осуществления настоящего изобретения, которая включает в себя множество датчиков 20а-20е в полости 16 с штанги 12 зуба.
Полость 16 с сформирована в той части штанги 12 зуба, где та разветвляется на две боковые стойки, между которыми проходит режущая кромка ковша. В полости 16 с располагаются, по меньшей мере, пять датчиков 20а-20, причем два датчика 20b и 20 с располагаются на стенке, ограничивающей полость 16 с в вертикальном направлении, два датчика 20d и 20е располагаются на противолежащей стенке, ограничивающей полость 16 с также в вертикальном направлении, а один датчик 20а располагается на стенке, ограничивающей полость 16 с в аксиальном направлении. Возможны и другие схемы расположения и иное количество датчиков без отступления от объема настоящего изобретения.
В этом варианте осуществления настоящего изобретения зуб 11 не имеет сформированной в нем полости, поскольку в зубе 11 не располагаются какие-либо датчики, но в других вариантах осуществления настоящего изобретения датчики могут располагаться не только в штанге 12 зуба, но и в самом зубе 11, и в этом случае полость может быть сформирована также и в зубе 11.
На фиг.9 показана система согласно одному из вариантов осуществления настоящего изобретения, которая включает в себя один или несколько датчиков, расположенных в полостях 16d, сформированных в стойках штанги 12 зуба.
Штанга 12 зуба прикрепляется к зубу 11 с помощью штифта 14, а между стойками штанги 12 зуба проходит режущая кромка 110 ковша. Штанга 12 зуба механически соединяется с режущей кромкой 111 посредством крепежных элементов 13 и 14, которые выполнены в виде скобы 13 (в данном случае в виде С-образной скобы) и клина 14.
Полости 16d представляют собой одно или несколько сквозных отверстий, выполненных в каждой стойке, в которые вводится один или несколько датчиков. Пример такого датчика/датчиков приведен на фиг.12.
Было установлено, что формирование полостей 16d на участке боковых стоек, который находится ближе всего к точке, где стойки разветвляются, обеспечивает оптимальное соотношение между механическими свойствами (позволяющими выдерживать усилия во время вхождения в зацепление с грунтом) штанги 12 зуба и точностью измерений усилий датчика/датчиков. Диаметр этих полостей 16 предпочтительно составляет 10 миллиметров или меньше, и он превышает или равен двум миллиметрам, а в более предпочтительном варианте этот диаметр составляет пять миллиметров.
На фиг.10А-10В показана система согласно одному из вариантов осуществления настоящего изобретения, аналогичная той, которая проиллюстрирована на фиг.9, где полости 16d сформированы на тех же участках боковых стоек, что и в варианте осуществления, который показан на фиг.9, а также на тех участках, где стойки разветвляются.
В такие полости 16d вводятся датчики 20а и 20b, например, в виде те изометрических датчиков (которые имеют, например, цилиндрическую форму), предназначенные для измерения напряжений или однократных деформаций штанги 12 зуба.
На фиг.11А-11В показана система согласно одному из вариантов осуществления настоящего изобретения, аналогичная той, которая проиллюстрирована на фиг.9, и где полости 16е сформированы на тех же участках боковых стоек, что и в варианте осуществления, который показан на фиг.10A-10В, а также на участке, где стойки разветвляются.
Полости 16е представляют собой отверстия, диаметр которых в предпочтительном варианте не превышает 25 миллиметров, а в более предпочтительном варианте - лежит в пределах 15-25 миллиметров (включая обе крайние точки). Эти полости 16е не являются сквозными, и поэтому они представляют собой лишь единичные отверстия. В указанных полостях 16е располагается один или несколько датчиков 20 и 20b, таких как, помимо прочего, цилиндрические тензометрические датчики или датчики относительного перемещения, предназначенные для измерения усилий.
На фиг.12 показано сечение полости, такой как полость 16d в варианте осуществления, который проиллюстрирован на фиг.9 и 10А-10В, с установленным в ней тензометрическим датчиком 21.
Тензометрический датчик 21 прикрепляется к цилиндру 23, выполненному, например, из стали, который содержит сквозное отверстие 22, в которое вводится и закрепляется тензометрический датчик 21.
В этом примере диаметр цилиндра 23 составляет около 4-5 миллиметров, и он меньше диаметра полости 16d, сформированной в штанге 12 зуба; а диаметр сквозного отверстия 22 в цилиндре составляет около 2 миллиметров. Цилиндр 23 прикрепляется к стенкам полости 16d, например, с помощью клея 24 таким образом, чтобы цилиндр 23 не мог выйти из полости во время функционирования машины, в состав которой входит описываемая система.
Тензометрический датчик 21 передает результаты измерений на управляющую электронику или в центральное средство управления, которые обычно располагаются за пределами полости 16d, с помощью кабеля (не показан). Помимо передачи результатов измерений кабель предотвращает попадание твердых частиц в полость 16d, так как он занимает, по меньшей мере, часть диаметра отверстия полости 16d, благодаря чему уменьшается вероятность повреждения датчика вследствие воздействия твердых частиц.
На фиг.13 показана система согласно одному из вариантов осуществления настоящего изобретения, в которой датчики 20а и 20b располагаются между разными элементами износа. В частности, датчики 20а и 20b располагаются в пространстве между крепежным элементом 13а (С-образной скобой) и штангой 12 зуба.
По результатам измерений датчиков 20а и 20b может быть рассчитано усилие, выдерживаемое крепежным элементом 13а, или штангой 12 зуба, или предпочтительно обоими этими элементами.
На фиг.14 показана часть системы согласно одному из вариантов осуществления настоящего изобретения, в которой один или несколько датчиков 20 располагаются на пластине или блоке (в этом примере показан блок), причем указанная пластина или блок располагается в полости 16f, сформированной в боковом отводе или стойке штанги 12 зуба.
Полость 16f сформирована на участке стойки штанги 12 зуба, который примыкает к точке, от которой отходят две боковые стойки. Полость 16f сформирована на наружной стороне стойки, т.е. на стороне, противоположной той, где проходит режущая кромка ковша.
Пластина или блок прикрепляется к штанге 12 зуба в полости 16f посредством или неподвижного соединения, или разъемного соединения. В первом случае пластина или блок может быть соединен с полостью сваркой или с помощью клея, причем в последнем случае предпочтительно, чтобы клеевое соединение было максимально жестким, чтобы усилия, прикладываемые к полости 16f, не смягчались клеем, что могло бы привести к заниженным значениям, измеряемым датчиком/датчиками 20. Как было указано выше, возможна также фиксация с помощью разъемного соединения в виде, по меньшей мере, одного резьбового соединения (предпочтительно множества таких резьбовых соединений для надежного сцепления пластины или блока со штангой 12 зуба); для этого полость 16f снабжена отверстиями под резьбовые соединения.
За счет такого размещения платины или блока штанга 12 зуба может быть сначала установлена на режущей кромке ковша (приварена к нему в случае необходимости), после чего пластина или блок с датчиками 20 механически соединяется со штангой 12 зуба. В случае неправильного срабатывания или выхода из строя компонентов, располагающихся на пластине или блоке (датчиков, управляющей электроники, если таковая предусмотрена, устройства или устройств электропитания и пр.), их замена может быть выполнена без съема штанги 12 зуба с режущей кромки ковша.
В предпочтительном варианте защитный корпус прикрепляется к пластине или блоку таким образом, чтобы при необходимости приваривания штанги 12 зуба к режущей кромке ковша для их механического соединения или распайки сварных соединений, когда указанный защитный корпус (вместе с расположенной в нем пластиной или блоком) уже размещен в полости 16f, можно было избежать повреждения компонентов вследствие воздействия высоких температур, которые имеют место во время сварки или распайки.
В некоторых вариантах осуществления настоящего изобретения обе стойки характеризуются наличием такой сформованной в них полости 16f для приема пластины или блока с одним или несколькими датчиками 20; соответственно, можно рассчитать усилия, выдерживаемые каждой стойкой.
На фиг.15 показана часть системы согласно одному из вариантов осуществления настоящего изобретения, в которой на крепежном элементе 13b закреплена плата 20, содержащая один или несколько датчиков (не показаны).
Крепежный элемент 13b представляет собой С-образную скобу для прикрепления штанги зуба к режущей кромке ковша, благодаря чему отпадает необходимость в сварном соединении, или же оно не может быть выполнено, что обычно характерно для тех случаев, когда режущая кромка и/или штанга зуба имеют большие размеры, и сварные соединения могут оказаться недостаточно надежными во время работы машины.
Помимо датчика/датчиков плата 20 может быть снабжена управляющей электроникой с тем, чтобы после ее прикрепления к одной из сторон С-образной скобы управляющая электроника была уже соединена с датчиком/датчиками.
Аналогичная схема расположения платы 20 показана на фиг.17, где представлена часть системы согласно другому варианту осуществления настоящего изобретения, в которой С-образная скоба 13с имеет такую форму, что один из ее участков снабжен вырезом. В этом вырезе обычно располагается упругий компонент (не показан) для упрочнения механического соединения между С-образной скобой и клином. На стенке этого выреза располагается плата 20, при этом по-прежнему сохраняется возможность установки упругого компонента на участке с вырезом и поверх платы 20 для упрочнения механического соединения, как это указано выше.
На фиг.16 показана часть системы согласно другому варианту осуществления настоящего изобретения, в которой С-образная скоба 13с с вырезом содержит размещаемый на ней датчик 20. В этом случае датчик относительного перемещения прикрепляется к одной из сторон выреза.
На фиг.18А-18В показана система согласно одному из вариантов осуществления настоящего изобретения, в которой штанга 12 зуба (показана только ее часть) снабжена множеством размещенных в ней датчиков 20.
Датчики 20 прикреплены к разным сторонам блока 25 (показан отдельно на фиг.18С). Указанный блок 25 предварительно сжат и размещен в полости 16g штанги 12 зуба, предназначенной для приема крепежного элемента, который механически соединяет штангу 12 зуба с самим зубом 11 всякий раз, когда первая входит в гнездо последнего. Датчики 20 прикрепляются к блоку 25, который в данном примере характеризуется формой в виде шестигранника, полученного методом прессования, который вписывается в полость 16g, но возможны также и иные формы без отступления от объема настоящего изобретения, например, цилиндрическая форма. Блок 25 выполнен из материала, который характеризуется модулем упругости, позволяющим ему воспроизводить деформации, испытываемые полостью 16g; к примеру, блок 25 может быть изготовлен из пластмассы, смолы, алюминия и т.п.
При приложении усилия к зубу 11 (что обозначено стрелкой, проходящей от первого конца 31 в направлении другого конца зуба 11 и заканчивающейся на штанге 12 зуба, причем указанная стрелка имеет криволинейную форму для показа разных направлений, в которых может прикладываться усилие к зубу 11, что также обозначено тремя прямыми стрелками рядом с первым концом 31), усилие также прикладывается в штанге 12 зуба, деформируя тем самым ее полость 16g, что проиллюстрировано множеством эллипсов на фиг.18А. Вследствие этого блок 25 в полости 16g воспроизводит указанную деформацию.
В зависимости от деформации блока 25 некоторые датчики 20 или другие датчики будут измерять напряжения или однократные деформации блока 25, и по результатам этих измерений могут быть рассчитаны значения усилий. В этих случаях с каждой стороны полости 16g может вводиться по оному штифту для механического соединения штанги 12 зуба с самим зубом 11, а блок 25 может располагаться между этими двумя штифтами.
В некоторых других вариантах осуществления настоящего изобретения датчики 20 закреплены на стенках полости 16g штанги 12 зуба, и в этом случае блок 25 не предусмотрен. Таким образом, датчики 20 измеряют напряжения или однократные деформации, когда полость 16g подвергается деформированию. При этом также предусмотрена возможность увеличения диаметра полости 16g по всей ее длине методом механической обработки с тем, чтобы датчики 20 могли быть прикреплены к стенкам на этом большем диаметре, вследствие чего предотвращается блокирование прохода под крепежный элемент.
На фиг.19А и 19В представлены перспективные изображения, иллюстрирующие штангу 12 зуба и зуб 11 системы согласно одному из вариантов осуществления настоящего изобретения.
На фиг.19А показана только часть штанги 12 зуба, в частности, внешняя часть того, что иногда называется головкой штанги 12 зуба, которая является частью, входящей в гнездо зуба (такое как гнездо, показанное на фиг.5). На разных гранях или участках с вырезами головки штанги 12 зуба располагается множество датчиков 20a-20d (два из которых, а именно 20b и 20d, обозначены штрихпунктирными линиями для иллюстрации того, что они закреплены на противоположной грани штанги 12 зуба, и поэтому не видны), предназначенных для измерения усилий. В этой связи датчики 20a-20d будут измерять величину и направления деформаций головки (что обозначено стрелками исключительно во избежание двусмысленного толкования).
На фиг.19В показана штанга 12 зуба с датчиками 20a-20d, которая располагается в гнезде зуба 11. Как можно видеть, датчики 20a-20d находятся на наружной части штанги 12 зуба, которая располагается в гнезде зуба 11.
Хотя это и не показано, но система, описанная в привязке к примерам, представленным на фиг.4-11В и 13-19В, может содержать дополнительные компоненты, как это показано, например, на фиг.1-3.
На фиг.20 показан график, который содержит результаты измерения усилия датчика на ковше землеройной машины на протяжении всех землеройных работ.
На этом графике качественно показан уровень усилия, величина которого измеряется одним датчиком на ковше во время выполнения следующих операций: загрузочной операции 191, операции 192 по транспортировке и разгрузочной операции 193.
Как можно видеть, операцией с наибольшим приложением усилий служит загрузочная операция 191, во время которой машина и элементы износа могут выйти из строя при приложении к ним чрезмерного вырывного усилия. Следует также понимать, что наличие датчика на ковше обеспечивает лишь предоставление информации о величине прикладываемого усилия, что может оказаться недостаточным для определения фактического состояния элементов износа или самой машины, т.е. недостаточным для того, чтобы можно было определить, работают ли элементы износа и машина на уровне ниже или выше своих функциональных возможностей, работают ли они на грани неминуемой поломки, эффективно ли выполняется данная операция земляных работ, и т.д. Кроме того, даже если эта информация может оказаться полезной для управления машиной, она не характеризует усилие, прикладываемое к элементам износа, и не указывает на то, какие из элементов фактически входят в зацепление с грунтом.
На фиг.21 показан график с множеством результатов измерения усилия с помощью датчиков на цилиндре в стреле машины.
Этот график показывает измерения усилия (в килоньютонах), приложенного в вертикальном направлении (штрихпунктирная линия) и аксиальном направлении (сплошная линия), а также величину итоговых результатов измерений усилия (точечная пунктирная линия).
Хотя с помощью таких датчиков могут быть обеспечены измерения усилия двух разных компонентов (в плоскости X-Z), измерения усилия в боковом направлении, которые соотносятся с определением состояния компонентов машины, не предусмотрены. Следовательно, размещение датчиков в цилиндре стрелы не обеспечивает предоставление достаточных данных для определения состояния, по меньшей мере, ковша и элементов износа.
На фиг.22А-22В показаны графики со значениями усилий двух зубьев системы согласно одному из вариантов осуществления настоящего изобретения; при этом значения усилий вычерчены в зависимости от времени.
Значения усилий были рассчитаны с помощью центрального средства управления системы, которое обработало результаты измерений, по меньшей мере, трех датчиков, размещенных в первом зубе элементов износа, предоставив тем самым значения усилия для первого зуба в аксиальном (точечная пунктирная линия), боковом (штрихпунктирная линия) и вертикальном (сплошная линия) направлениях, как это показано на фиг.22А. Центральное средство управления также обрабатывает результаты измерений, по меньшей мере, с трех датчиков, размещенных во втором зубе элементов износа с целью предоставления значений усилия в аксиальном (точечная пунктирная линия), боковом (штрихпунктирная линия) и вертикальном (сплошная линия) направлениях, как это показано на фиг.22В. Первый и второй зубья из числа множества элементов износа располагаются рядом друг с другом; иначе говоря, между ними нет никаких других зубьев.
Как можно видеть, несмотря на близость двух зубьев друг к другу имеется существенная разница между значениями усилий одного и того же компонента между двумя зубьями. В этой связи значения усилия для первого зуба в аксиальном направлении (по краю режущей кромки) в определенные периоды времени в три или четыре раза меньше соответствующих значений для второго зуба. Аналогичным образом значения усилия для первого зуба в вертикальном направлении в определенные периоды времени примерно в три раза меньше соответствующих значений для второго зуба.
Центральное средство управления, центр управления машины и/или оператор могут использовать эти значения усилий для разных элементов износа, предпочтительно по трем осям, для извлечения, например, следующей информации: реакции грунта на воздействие разных элементов износа; к каким элементам износа прикладывается большее усилие, и в каких направлениях; характеристик извлекаемого грунта (дробности, твердости, уплотненности и пр.); и пр. Эта информация, в свою очередь, может помочь оператору или дать возможность центральному средству управления или центру управления определить следующие параметры: траекторию, по которой движется ковш; угол атаки, который больше подходит для текущей ситуации; и/или количество прикладываемого усилия. Кроме того, отслеживание значений усилия в динамике по времени также позволяет определить наличие близкого к поломке элемента износа, дополнительные характеристики грунта, энергопотребление и пр.
На фиг.23А-23С показаны графики с рассчитанными усилиями, выраженными в килоньютонах, для одного зуба, снабженного размещенными в нем датчиками. В частности, на фиг.23А показаны значения усилия, соответствующие аксиальному направлению; на фиг.23В показаны значения усилия, соответствующие боковому направлению; а на фиг.23С показаны значения усилия, соответствующие вертикальному направлению.
Кроме того, на фиг.23D и 23Е показаны графики с углами, под которыми к штанге зуба прикладывалось усилие, сообразно со значениями усилия, показанными на фиг.23А-23С. Это означает, что по значениям усилия могут быть рассчитаны два разных угла, и после комплексной обработки этих углов могут быть определены направления приложений усилия. В этой связи угловые значения, показанные на фиг.23D, отображают угол касания, определяемый значениями усилия в аксиальном направлении, поделенными на значения усилия в вертикальном направлении, тогда как угловые значения, показанные на фиг.23Е, отображают угол касания, определяемый значениями усилия в аксиальном направлении, поделенными на значения усилия в боковом направлении.
Таким образом, рассчитываются не только значения усилия, но и значения углов. Более того, в некоторых вариантах осуществления настоящего изобретения угол атаки может быть определен как угол касания, заданный отношением значений приложения усилия в аксиальном направлении к значениям приложения усилия в вертикальном направлении, как это показано на фиг.23D.
Совершенно очевидно, что оба набора значений могут быть использованы для определения того, не прикладывается ли к элементам износа слишком большое усилие, и необходимо ли предпринять какие-либо корректирующие действия.
На фиг.24 показан оператор 300, дистанционно управляющий землеройной машиной 100, снабженной системой согласно одному из вариантов осуществления настоящего изобретения.
Машина 100 является машиной, частично управляемой системами согласно вариантам осуществления настоящего изобретения (т.е. является полуавтоматической), но в некоторых случаях она может полностью управляться системами согласно вариантам осуществления настоящего изобретения (т.е. является автоматической или автономной).
Машина 100 включает в себя кабину 102, средство 104 перемещения, стрелу 106, рукоять 108, соединенную со стрелой 106, и ковш 110, соединенный с рукоятью 108. Каждый узел из числа стрелы 106, рукояти 108 и ковша 110 выполнен подвижным и поворотным за счет использования гидросистемы, которая включает в себя множество цилиндров 105.
Оператор 300 находится на удалении от машины 100, в частности, в пункте 250 управления, который снабжен средствами 260 пользовательского ввода (например, джойстиками, клавиатурой, кнопками и т.п.) и средствами 270 представления информации пользователю (например, экранами, динамиками, светодиодными индикаторами и т.д.). Пункт 250 управления передает данные на машину 100 и принимает данные с машины 100 посредством беспроводной связи. Машина 100 передает данные, предоставляемые ее средством машинного зрения, причем это средство отображает положение и ориентацию стрелы, рукояти и ковша машины. Машина 100 может также передавать данные, связанные с состоянием других ее компонентов, включая, помимо прочего, рассчитанные усилия и/или команды, выдаваемые центральным средством управления системы измерения усилия, входящей в состав машины 100.
Оператор 300 имеет возможность видеть эти данные с помощью средств 270 представления информации и дистанционно управлять машиной 100 с использованием средств 260 пользовательского ввода. Пункт 250 управления передает пользовательские команды, вводимые с помощью средств 260 пользовательского ввода, на машину 100, в частности, в ее центр управления, который в свою очередь исполняет эти команды по мере их получения или автоматической коррекции на основании разных данных машины 100.
На фиг.25А-25С приведены разные примеры усилия, прикладываемого к ковшу 110, или углы атаки, рассчитанные системами согласно вариантам осуществления настоящего изобретения.
Как можно понять из этих фигур, наличие указанной системы позволяет определить, каким образом грунт прикладывает усилие к разным элементам 10 износа (соединенным с режущей кромкой 111 ковша) при их вхождении в зацепление с грунтом во время выполнения операций по выемке и загрузке материала. В каждом зубе, штанге зуба или на крепежных элементах в составе элементов 10 износа, которые образуют каждый элемент GET, или между двумя такими элементами 10 износа, которые образуют каждый элемент GET, установлен, по меньшей мере, один датчик.
В этой связи на фиг.25А показаны две разные составляющие усилия одинаковой величины, прикладываемые к элементам 10 износа. Первая составляющая (обозначенная сплошной линией) прикладывается в аксиальном направлении, а вторая составляющая (обозначенная штрихпунктирной линией) прикладывается в вертикальном направлении. Усилие, соответствующее первой составляющей, не является чрезмерным в соответствии с заданным пороговым значением чрезмерного усилия, установленным для усилий, действующих в аксиальном направлении; тогда как усилие, соответствующее второй составляющей, является чрезмерным в соответствии с заданным пороговым значением чрезмерного усилия, установленным для усилий, действующих в вертикальном направлении, вследствие чего может возникнуть рискованная ситуация (на что указывает восклицательный знак, показанный лишь для большей наглядности). Таким образом, центральное средство управления системы, помимо вычисления этих усилий на основании результатов измерений датчиков, может выдавать команды в виде предупреждения или изменения режима работы машины.
Если система измерения усилий не в состоянии рассчитать усилие для каждого из этих компонентов, то система может прийти к выводу, что нет никакого риска, т.е., например, величина рассчитываемого усилия меньше заданного порогового значения чрезмерного усилия, установленного для значений этой величины, что не отображает итоговый крутящий момент, подаваемый на элементы износа вследствие воздействия второй составляющей усилия, который может быть рассчитан с помощью систем и способов согласно настоящему изобретению. Помимо расчета усилий по трем осям система согласно настоящему изобретению обеспечивает возможность определения (посредством результатов измерений) среднеквадратичной энергии, углов, позволяющих увеличить напряжения на элементах износа, и пр.
В примере, приведенном на фиг.25В, показаны типичные направления, в которых грунт может вступать в зацепление с элементами 10 износа, и какой угол атаки рассчитан центральным средством управления на основании результатов измерений, выполненных датчиками, как наиболее эффективный для выполнения земляных работ или причиняющий наименьший вред элементам 10 износа при текущем наборе условий.
Центральное средство управления рассчитывает, что контакт с грунтом в направлении, которое обозначено стрелкой в виде сплошной линии, наносит наименьший вред элементам 10 износа. Соответственно, если грунт зацепляется в направлении, обозначенном стрелками в виде штрихпунктирной линии, элементам 10 износа причиняется больший вред, и поэтому в этом направлении прикладывается меньшее вырывное усилие во избежание поломки элементов 10 износа, хотя при этом эффективность земляных работ будет падать, поскольку извлекается меньший объем материала. Но еще больший вред целостности элементов 10 износа причиняется, когда они входят в зацепление с грунтом в направлении, которое обозначено стрелками в виде точечно-пунктирной линии, что вызывает высокий риск более быстрого повреждения элементов 10 износа (на что указывает восклицательный знак).
Следовательно, на основании результатов измерений центральное средство управления может определить предпочтительный угол атаки. Хотя показаны только стрелки, обозначающие направление, в котором элементы 10 износа должны войти в зацепление с грунтом, совершенно очевидно, что угол атаки задается углом, образованным между стрелкой и осевым направлением.
Следовательно, в этом примере предпочтительный угол составляет примерно -15°, а допустимый диапазон возможных углов атаки с углами все менее предпочтительными по мере их отклонения от значения в -15°, приблизительно лежит в пределах от -60° до 30°.
На фиг.25С приведен другой пример, в котором элементы 10 износа входят в зацепление с грунтом под таким углом атаки, что к элементам 10 прикладывается усилие, главным образом, по оси X. Однако это усилие распределяется среди пяти зубьев неравномерно. К зубьям, которые располагаются ближе к левой стороне ковша 110, прикладывается усилие большей величины, чем к зубьям, которые располагаются ближе к правой стороне ковша 110; иначе говоря, к каждому зубу прикладывается усилие меньшей величины, чем к зубьям, которые располагаются слева от него.
Соответственно, первые два зуба с левой стороны воспринимают усилие, которое является чрезмерным с учетом заданного порогового значения чрезмерного усилия, тогда как три зуба с правой стороны (т.е. средний зуб и два правых зуба) воспринимают усилие, которое не является чрезмерным с учетом заданного порогового значения чрезмерного усилия.
Совершенно очевидно, что один датчик на ковше 110, например, не в состоянии определить, что чрезмерное усилие прикладывается к определенному зубу, а не к каким-либо другим зубьям. В действительности, может возникнуть такая ситуация, когда усилие, рассчитанное на основании результатов измерений такого единичного датчика, окажется ниже заданного порогового значения чрезмерного усилия, и поэтому не будет детектировано возникновение рискованной ситуации.
В примере, приведенном на фиг.25А-25С, на ковше 110 предусмотрено пять зубьев, тогда как в других примерах может быть предусмотрено, например, четыре зуба или больше пяти зубьев, и в последнем случае количество зубьев обычно составляет менее двадцати. Например, в некоторых примерах предусмотрено восемь зубьев, десять зубьев, четырнадцать зубьев, пятнадцать зубьев и т.д. Кроме того, ковш 110 может иметь другую форму, и поэтому его режущая кромка 111 также будет иметь другую форму, известную в данной области техники.
На фиг.26А показан график, иллюстрирующий первый иллюстративный режим работы систем согласно вариантам осуществления настоящего изобретения, тогда как на фиг.26В показан другой график, иллюстрирующий второй иллюстративный режим работы.
В первом иллюстративном режиме работы датчик или датчики в элементах 10 износа непрерывно (т.е. в аналоговом режиме) измеряют напряжения или однократные деформации 200 через определенные промежутки времени. Результаты указанных измерений отбираются с заданной частотой, обозначенной интервалами 205. Отобранные результаты измерений передаются датчиком/датчиками или управляющей электроникой в центральное средство управления с заданной частотой, обозначенной импульсами 210; причем на каждую такую передачу затрачивается больше энергии, чем на выборку, и поэтому эти передачи существенно влияют на срок службы, например, аккумуляторной батареи или батарей. Повторяемая передача результатов измерений выполняется вне зависимости от измеренного напряжения или однократной деформации 200; таким образом, например, она может быть использована для расчета усилия, выдерживаемого элементами износа на протяжении всего цикла работы машины, включая загрузку, транспортировку и разгрузку материала.
Во втором иллюстративном режиме работы датчик или датчики выполняют измерения аналогичным образом, хотя выборка осуществляется в зависимости от измеренных напряжений или однократных деформаций. Таким образом, когда результаты измерений превышают заданное пороговое значение, которое может быть установлено в качестве индикатора работ по выемке и загрузке материала или того, что к элементам износа прикладывается большое усилие, выборка осуществляется чаще, чем в первом иллюстративном режиме, для сбора большего объема данных о выполняемой в данный момент операции с целью выдачи предупреждения оператору или коррекции способа вхождения в зацепление с грунтом, обеспечивая более эффективную или менее рискованную загрузку с помощью элементов GET, В это время осуществляются передачи 210 для расчета усилий и выдачи выходных команд всякий раз, когда они определяются центральным средством управления на основании заданных в нем критериев. Можно также повышать частоту передач 210, исходя из значения измерений, вследствие чего чем выше значение измерений, тем выше становится частота, и всякий раз, когда значение измерений уменьшается, то же самое происходит с частотой передач 210,
Оба режима из числа первого и второго режимов могут быть избирательно использованы в центральном средстве управления одной и той же системы для сокращения времени отклика или улучшения сбора данных с разными энергетическими профилями. Второй режим приводит к увеличению энергопотребления во время загрузки, что позволяет сократить время отклика, но при этом могут возникать периоды, в течение которых вообще не передаются результаты измерений из-за их низких значений, тогда как первый режим обеспечивает равномерное энергопотребление, что позволяет получать информацию на протяжении всех земляных работ. За счет объединения обоих указанных режимов и коррекции их разной частоты энергия, выдаваемая устройством/устройствами электропитания, может подаваться в течение длительного времени.
На фиг.27 приведен пример обработки данных центральным средством 50 управления систем согласно вариантам осуществления настоящего изобретения, который представлен в виде блок-схемы.
Системы включают в себя, по меньшей мере, следующие компоненты: центральное средство 50 управления, которое содержит множество процессоров 51, блоков памяти 52 и модулей связи (не показаны); множество датчиков 20, каждый из которых предпочтительно снабжен подключенной к нему управляющей электроникой 40 (по одной на каждый датчик или одной для нескольких датчиков 20); и множество элементов 10 износа. В некоторых вариантах осуществления настоящего изобретения частью систем является центр 150 управления машины.
Каждый датчик или группа датчиков 20 измеряет напряжения или однократные деформации соответствующей группы элементов износа (в данном случае зуба 11, штанги 12 зуба и крепежного элемента или элементов 14). В этом примере показаны две группы элементов износа, но может быть предусмотрена всего одна или более двух таких групп (что обозначено точками).
Один или несколько процессоров и блоков памяти 51 и 52 центрального средства 50 управления обрабатывают результаты измерений датчика или группы датчиков 20 с тем, чтобы рассчитать усилия, выдерживаемые соответствующим элементом/элементами 11, 12, 14 износа. Значения усилий затем передаются другому одному или нескольким процессорам и блокам памяти (проиллюстрированы самым верхним блоком схемы центрального средства 50 управления), которые принимают значения усилий, соответствующие каждому элементу 10 износа, отслеживаемому таким образом, и выполняют следующие операции: передают их в центр 150 управления в неизменном виде (центр 150 управления, в свою очередь, может генерировать команды на основании, по меньшей мере, этих значений усилий); и/или обрабатывают все значения усилий с тем, чтобы определить, работает ли какой-либо элемент или элементы 10 износа на уровне ниже или выше своих функциональных возможностей, исходя из заданных пороговых значений, установленных для них, и выдают выходные команды на основании полученных результатов, которые затем передаются в центр 150 управления.
В некоторых вариантах осуществления настоящего изобретения другой один или несколько процессоров и блоков памяти принимают входные данные, выдаваемые центром 150 управления или другими узлами машины, и обрабатывают указанные входные данные вместе со значениями усилия с тем, чтобы определить, следует ли предпринять какие-либо корректирующие действия. В этой связи входные данные не обязательно должны быть ограничены данными, считываемыми с компонентов машины, а для выполнения расчетов значение могут иметь также и параметры машины или ее работы, например: тип ковша или самой машины (иначе говоря, его/ее геометрия, масса и/или размеры и пр.), тип грунта (тип материала, его твердость, степень его уплотнения и пр.), вырывное усилие, информация об инерции и пр.
Аналогичным образом в некоторых вариантах осуществления настоящего изобретения другой один или несколько процессоров и блоков памяти сохраняют и/или принимают данные за прошедшие периоды о рассчитанных значениях усилий и другие входные данные машины с тем, чтобы во время обработки значений усилий, прикладываемых к элементам GET, можно было применять методы машинного обучения, что позволяет корректировать выходные команды на основании предыдущих значений, постепенно повышая точность итогового результата применения методов машинного обучения. Данные за прошедшие периоды, используемые при машинном обучении, предпочтительно обрабатываются посредством сопровождения данных тегами, благодаря чему персонал просматривает данные, например, вместе с журналами, которые регистрируются оператором или записями с камеры; таким образом, персонал классифицирует разные наборы данных для обучения с участием оператора, что повышает точность итогового результата классификаций и выходных данных, обеспечиваемых методами машинного обучения, во время проведения последующих земляных работ.
Данные, рассчитываемые центральным средством 50 управления, могут быть использованы во время работы машины, а также для последующего анализа ее работы с тем, чтобы определить, как ведут себя элементы износа и сама машина, и не могут ли другие элементы износа (например, по своим размерам, форме, количеству зубьев и пр.) оказаться более подходящими для тех условий, в которых находится машина.
На фиг.28 показан способ 400 согласно одному из вариантов осуществления настоящего изобретения, представленный в виде блок-схемы.
Способ 400 предусматривает стадию 410 обеспечения наличия системы согласно настоящему изобретению, с помощью которой могут быть измерены усилия, выдерживаемые элементами износа системы. Элементы износа системы соединены с режущей кромкой ковша землеройной машины.
Способ 400 дополнительно предусматривает стадию 420 измерения усилий (например, напряжений, однократных деформаций) с помощью датчика/датчиков системы.
Способ 400 дополнительно предусматривает стадию 430 обработки результатов измерений для расчета усилий, выдерживаемых элементами износа. Центральное средство управления системы выполняет обработку таким образом, что оно обрабатывает (стадия 432) результаты измерений каждого датчика для расчета выдерживаемых усилий, а значения усилий, рассчитанные в ходе указанной обработки (стадия 432), затем обрабатываются на стадии 434 (когда в системе предусмотрено более одного датчика) вместе со значениями усилий, рассчитанными для других датчиков; таким образом, посредством всех этих измерений можно определить динамические характеристики элементов износа. Иначе говоря, сначала обрабатываются (стадия 432) результаты измерений каждого датчика, а затем рассчитанные значения усилий обрабатываются (стадия 434) все вместе для оценки усилия, выдерживаемого элементами износа; после этого полученный результат может быть передан (на стадии 450), например, в центр управления машины.
Этот способ может дополнительно предусматривать определение, с помощью центрального средства управления, подлежащего выполнению действия (стадии 440а-440с) на основании совокупных значений усилия (рассчитанных на стадии 434) и представление такого действия в виде выходных команд, которые передаются в центр управления на стадии 450.
Действие, подлежащее выполнению, может представлять собой, например:
- выдачу (на стадии 440а) предупреждения в виде, по меньшей мере, одного воспринимаемого сигнала всякий раз, когда рассчитанные (на стадии 434) значения усилия превышают первое заданное пороговое значение (например, заданное пороговое значение чрезмерного усилия) или оказываются меньше второго заданного порогового значения (например, заданного порогового значения оптимального усилия);
- повышение (на стадии 440b) вырывного усилия машины, или путем оказания содействия в этом оператору (посредством коррекции команд оператора), или путем автоматической выдачи машине команд на выполнение этой операции всякий раз, когда рассчитанные (на стадии 434) значения усилия оказываются меньше второго заданного порогового значения; и
- уменьшение (на стадии 440с) вырывного усилия машины, или путем оказания содействия в этом оператору (посредством коррекции команд оператора), или путем автоматической выдачи машине команд на выполнение этой операции всякий раз, когда рассчитанные (на стадии 434) значения усилия превышают первое заданное пороговое значение.
И, наконец, способ 400 предусматривает повторение (на стадии 460) расчета (стадии 432 и 434) значений усилия на основании дополнительных измерений (на стадии 420) датчика/датчиков; определение (стадии 440а-440с), на основании результатов этих измерений, указанного действия (если необходимо выполнить какое-либо действие); и передачу значений усилия или выходных команд в центр управления. Эти стадии предпочтительно повторяются (460) на протяжении всего цикла земляных работ.
На фиг.29-32 приведены примеры способов коррекции работ по выемке и загрузке материала, выполняемых землеройной машиной.
В привязке к фиг.29 материал 500, подлежащий загрузке, представляет собой однородный и рыхлый (или неуплотненный) материал. Машина перемещает ковш 110, задействуя для этого его стрелу и рукоять и следуя траектории 550, призванной обеспечить зацепление материала 500 элементами износа, которые образуют определенный угол относительно материала 500, максимально приближенный к 90°. После вхождения в зацепление значения усилия, рассчитанные центральным средством управления, подвергаются непрерывному отслеживанию в случае, если к элементам износа прикладывается чрезмерное усилие. Затем ковш 110 поворачивается, совершая вращательное движение 560, что вызывает изменение угла атаки ковша 110 по мере загрузки в него материала 500; эта операция предпочтительно выполняется таким образом, чтобы ковш 110 располагался максимально параллельно поверхности материала 500, Затем, когда ковш 110 заполнится материалом 500, он продолжит совершать вращательное движение до тех пор, пока не займет положение открытой стороной вверх с тем, чтобы из него не выпадал материал 500, и по достижении этой точки машина начнет перемещаться к грузовику, в который она выгрузит материал 500,
На фиг.30 материал 501, подлежащий загрузке, является однородным и уплотненным. Машина перемещает ковш 110 по траектории 550, аналогичной той, которая была описана в привязке к фиг.29. После зацепления материала 501 элементами GET оказывается, что усилия, рассчитанные центральным средством управления, превышают заданное пороговое значение чрезмерного усилия. Центральное средство управления передает выходные команды, или для выдачи предупреждения оператору машины (если таковой имеется, т.е. если оператор не действует автономно), или на изменение (или содействуя оператору в изменении) траектории движения ковша 110 таким образом, чтобы тот перемешался вверх и вниз, совершая небольшие движения (обозначенные стрелками), одновременно пытаясь совершать вращательное движение 560 для загрузки материала 501. Эти движения служат цели вскрытия уплотненного материала 501, чтобы уменьшить усилие, прикладываемое им к элементам GET и обеспечить возможность дальнейшей загрузки материала. Материал 501 разбивается, и ковш 110 продолжает совершать вращательное движение до тех пор, пока ковш 110 не наполнится материалом 501, после чего машина перемещает его к грузовику и выгружает.
На фиг.31 показан материал 502, подлежащий загрузке, который может быть, например, однородным и рыхлым. Траектория 550, по которой движется ковш 110, аналогична той, которая описана в двух предыдущих примерах. Когда элементы износа входят в контакт с материалом 502, рассчитанные усилия находятся на уровне, который ниже заданного порогового значения чрезмерного усилия. Во время совершения вращательного движения для заполнения ковша 110 материалом 502 движение ковша 110 блокируется камнем 570, вследствие чего к элементам GET прикладывается усилие, которое оказывается чрезмерным в соответствии с заданным пороговым значением. В этом случае вырывное усилие может быть или сохранено на прежнем уровне, или уменьшено с тем, чтобы снизить риск повреждения элементов износа, и предпринимаются попытки совершения ковшом 110 таких же движений вверх и вниз, которые проиллюстрированы на фиг.30, если имеется возможность преодолеть блокировку камнем 570 и продолжить совершение вращательного движения 551 для заполнения ковша 110 материалом 502.
И, наконец, на фиг.32 приведен пример, когда характеристики материала 503 неизвестны. Машина перемещает ковш 110 по указанной траектории 550, обеспечивая его вхождение в зацепления с материалом 503. После зацепления материала 503 рассчитываются прикладываемые усилия, а также угол их приложения, после чего выявляется, что величина первого усилия F1 превышает величину усилия F2, которое в отличие от усилия F1 прикладывается не в осевом направлении элементов износа. На основании рассчитанного угла и величины обоих усилий траектория движения ковша 110 должна быть скорректирована таким образом, чтобы образовался угол атаки, при котором усилие F2 прикладывалось бы по существу в осевом направлении элементов износа; для этого центральное средство управления выдает соответствующие команды, или для информирования оператора, или для автоматической коррекции траектории или угла атаки. Таким образом, к элементам износа может прикладываться меньшее усилие, а операция по загрузке материала может выполняться с большим КПД и с меньшими повреждениями элементов износа.
В контексте настоящего документа термин «содержит» и его производные (такие как «содержащий» и пр.) не должны рассматриваться как имеющие исключающий характер; иначе говоря, эти термины не должны трактоваться как исключающие возможность того, что все описанное и заданное может включать в себя дополнительные элементы, стадии и т.п.
С другой стороны, очевидно, что заявленное изобретение не ограничено конкретным вариантом/вариантами его осуществления, описанными в настоящем документе, а также включает в себя любые изменения, которые могут быть внесены специалистом в данной области техники (например, в части выбора материалов, размеров, компонентов, конфигурации и прочего) в рамках объема настоящего изобретения, определяемого его формулой.
| название | год | авторы | номер документа |
|---|---|---|---|
| СБОРНЫЙ УЗЕЛ ДЛЯ ЗЕМЛЕРОЙНОЙ МАШИНЫ, РАБОЧИЙ ОРГАН ЗЕМЛЕРОЙНОЙ МАШИНЫ, ЗЕМЛЕРОЙНАЯ МАШИНА, СПОСОБ СБОРКИ УЗЛА С ЭЛЕМЕНТАМИ ИЗНОСА ДЛЯ ЗЕМЛЕРОЙНОЙ МАШИНЫ И ЭЛЕМЕНТ ИЗНОСА РАБОЧЕГО ОРГАНА СБОРНОГО УЗЛА ДЛЯ ЗЕМЛЕРОЙНОЙ МАШИНЫ | 2022 |
|
RU2836805C2 |
| УСТРОЙСТВО КРЕПЛЕНИЯ ИЗНАШИВАЕМОГО ИЛИ ЗАЩИТНОГО ЭЛЕМЕНТА К КОВШУ ЗЕМЛЕРОЙНОЙ МАШИНЫ, СООТВЕТСТВУЮЩИЙ СПОСОБ КРЕПЛЕНИЯ И ИЗНАШИВАЕМАЯ ИЛИ ЗАЩИТНАЯ СИСТЕМА | 2016 |
|
RU2660825C1 |
| Фиксатор для изнашиваемого элемента землеройной машины | 2015 |
|
RU2669211C2 |
| КРЕПЕЖНОЕ УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ ИЗНАШИВАЕМОГО ИЛИ ЗАЩИТНОГО ЭЛЕМЕНТА К КОВШУ ЗЕМЛЕРОЙНОЙ МАШИНЫ И СООТВЕТСТВУЮЩАЯ СИСТЕМА КРЕПЛЕНИЯ И СПОСОБ | 2016 |
|
RU2705632C1 |
| ОХВАТЫВАЕМАЯ И ОХВАТЫВАЮЩАЯ ЧАСТИ ИЗНАШИВАЕМОГО УЗЛА КОВША ЗЕМЛЕРОЙНОЙ МАШИНЫ | 2014 |
|
RU2622958C1 |
| РЕЖУЩИЙ КРАЙ КОВША ДЛЯ МАШИН ДЛЯ ЗЕМЛЯНЫХ РАБОТ | 2017 |
|
RU2735207C1 |
| КОВШ ЭКСКАВАТОРА И ЗЕМЛЕРОЙНАЯ МАШИНА | 2014 |
|
RU2646260C2 |
| ОПТИМИЗАЦИЯ ДИНАМИЧЕСКОГО ДВИЖЕНИЯ ЗЕМЛЕРОЙНЫХ МАШИН | 2015 |
|
RU2657547C1 |
| Зуб и переходник для землечерпательной машины | 2015 |
|
RU2678342C2 |
| КОВШ ЗЕМЛЕРОЙНОЙ МАШИНЫ | 1995 |
|
RU2098563C1 |
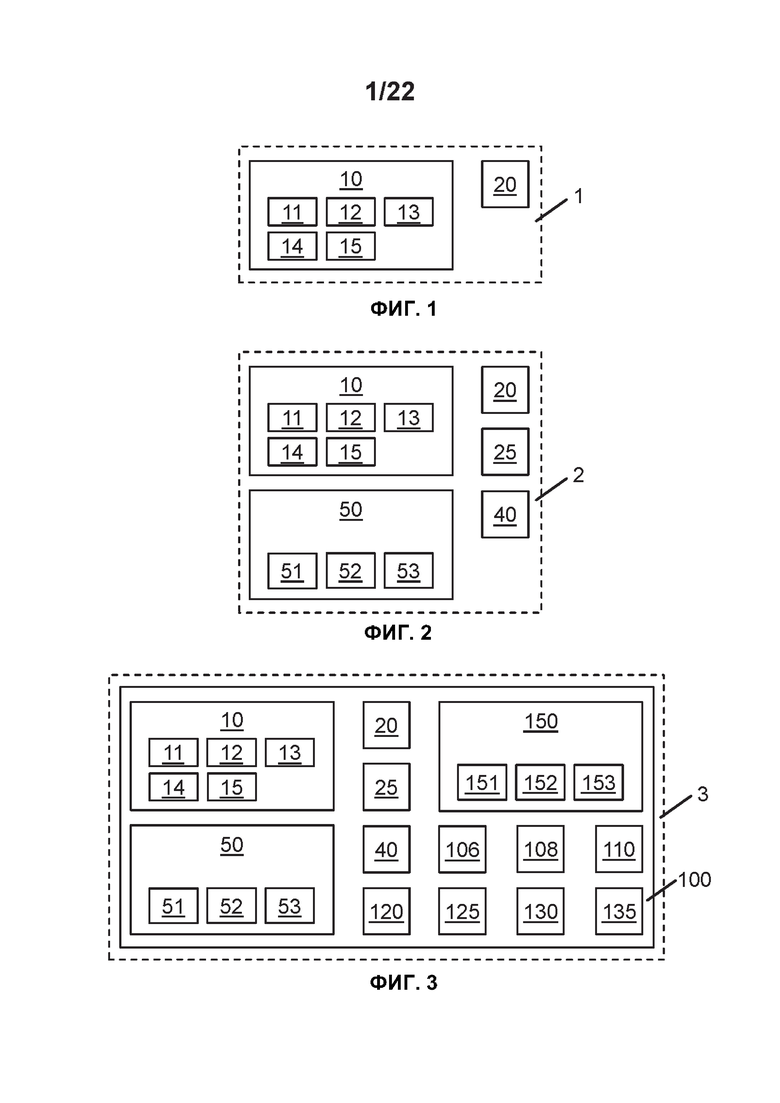
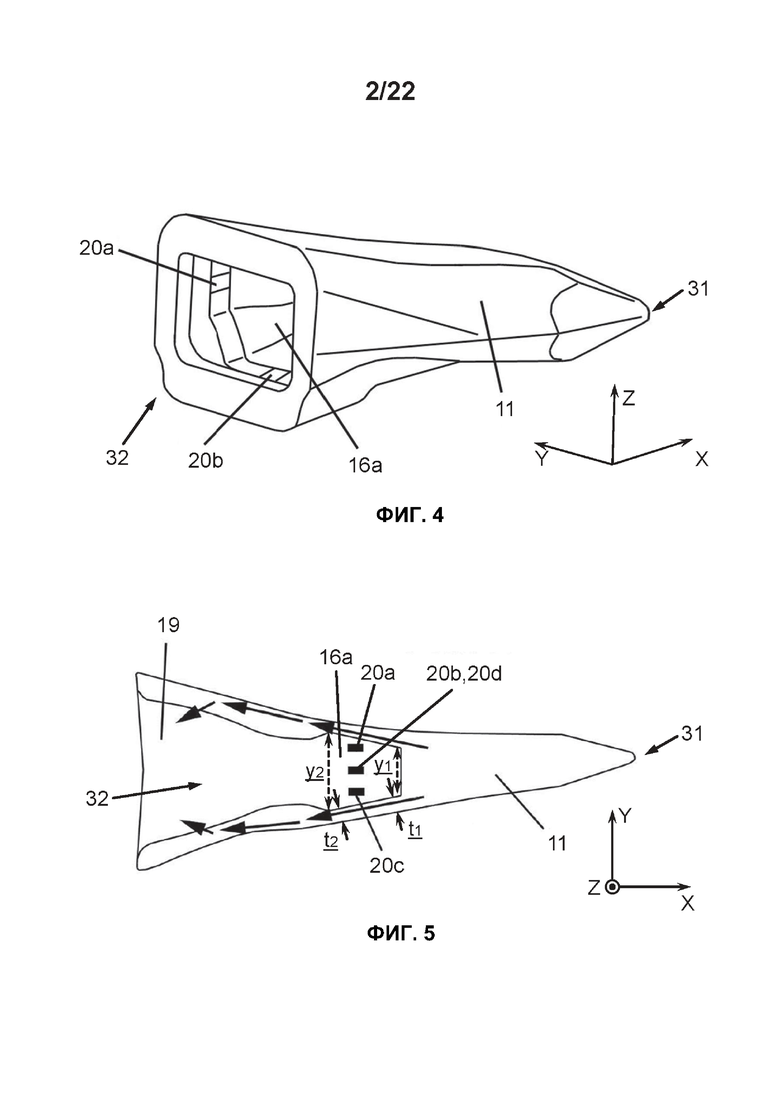
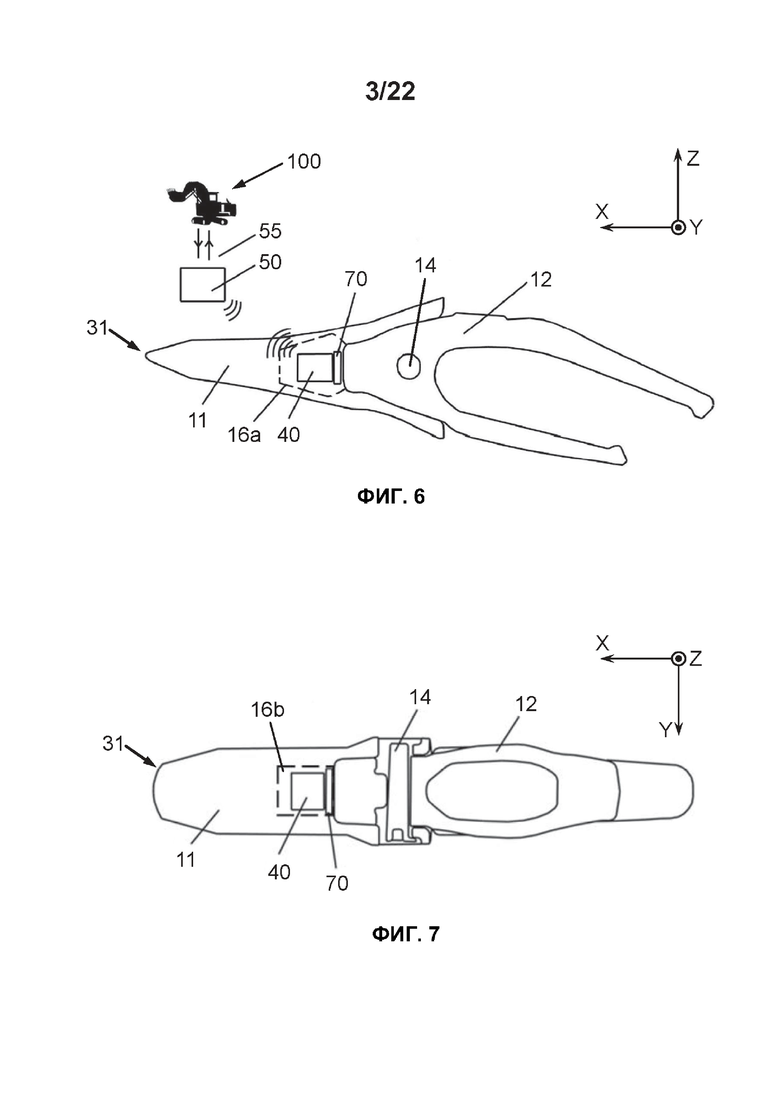
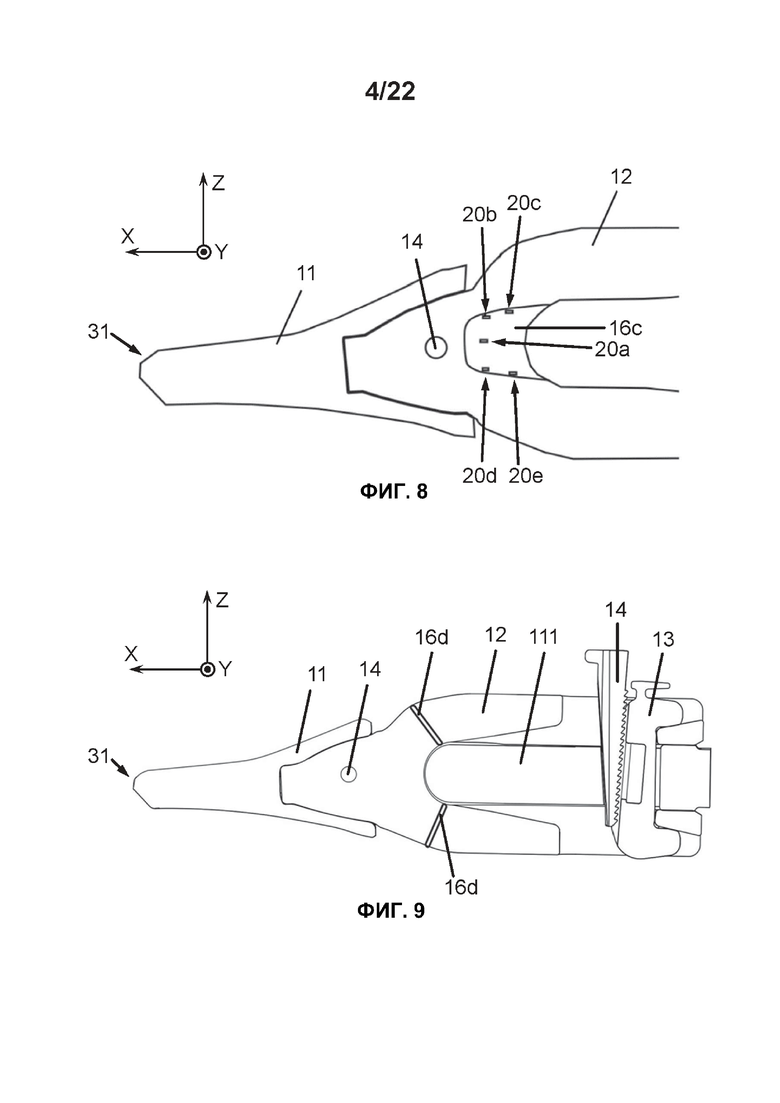
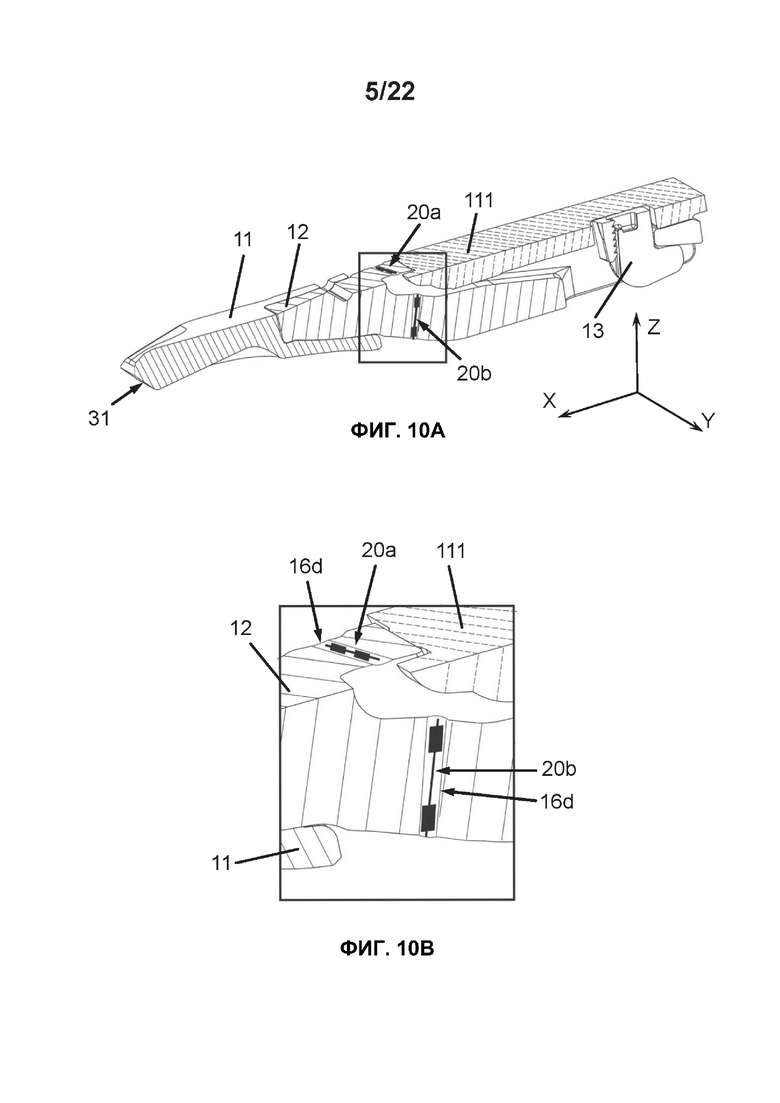
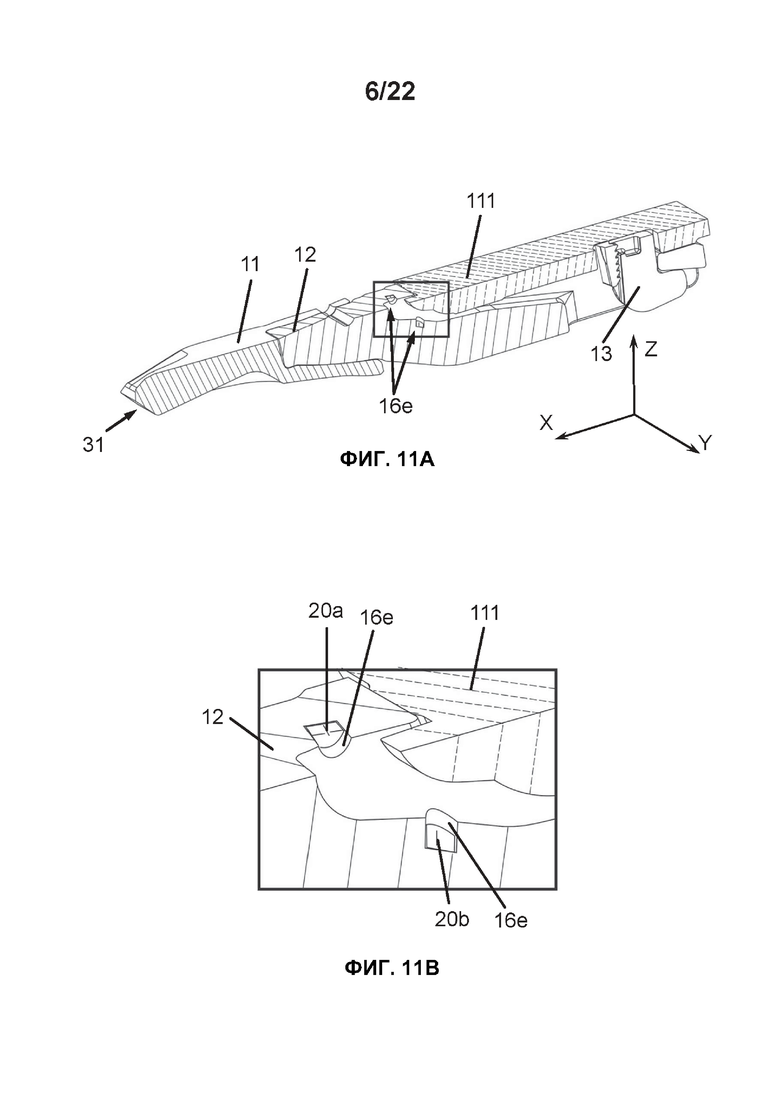
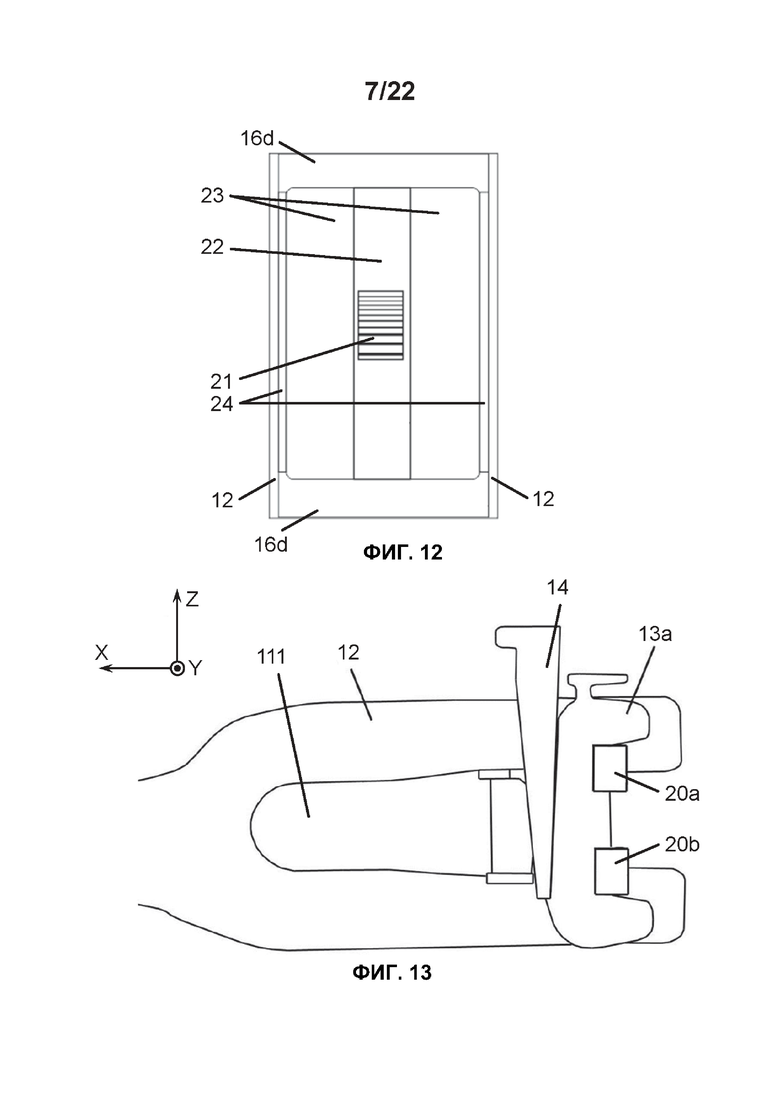
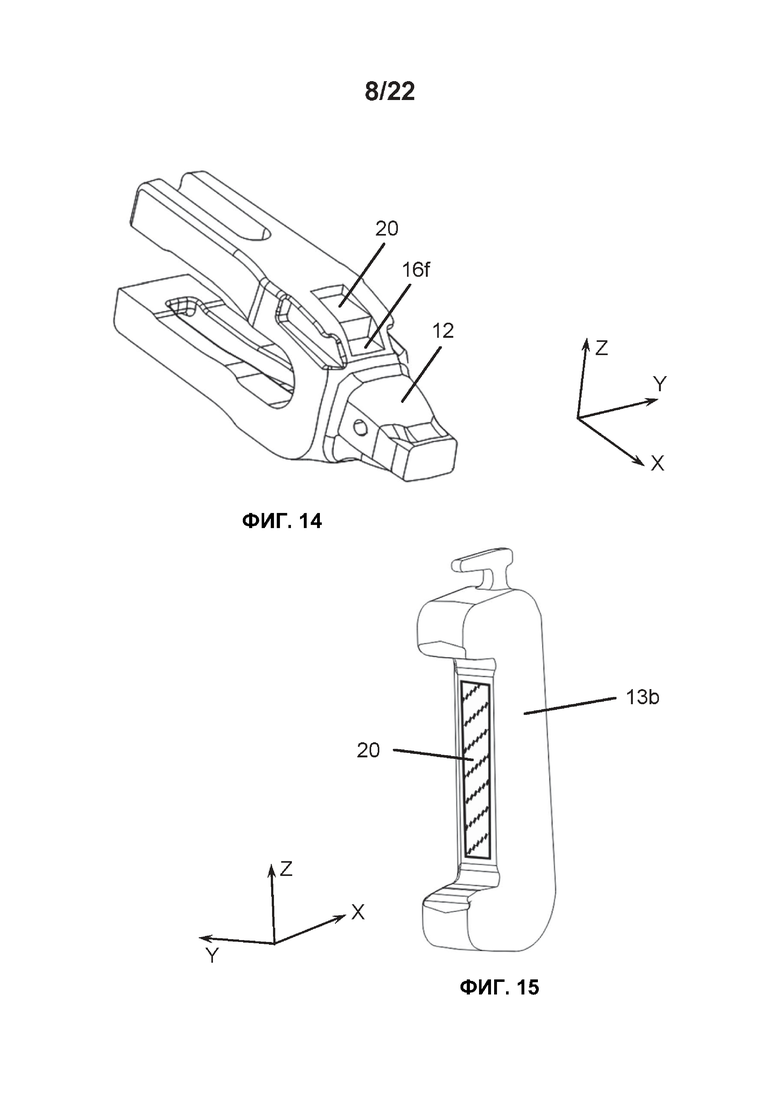
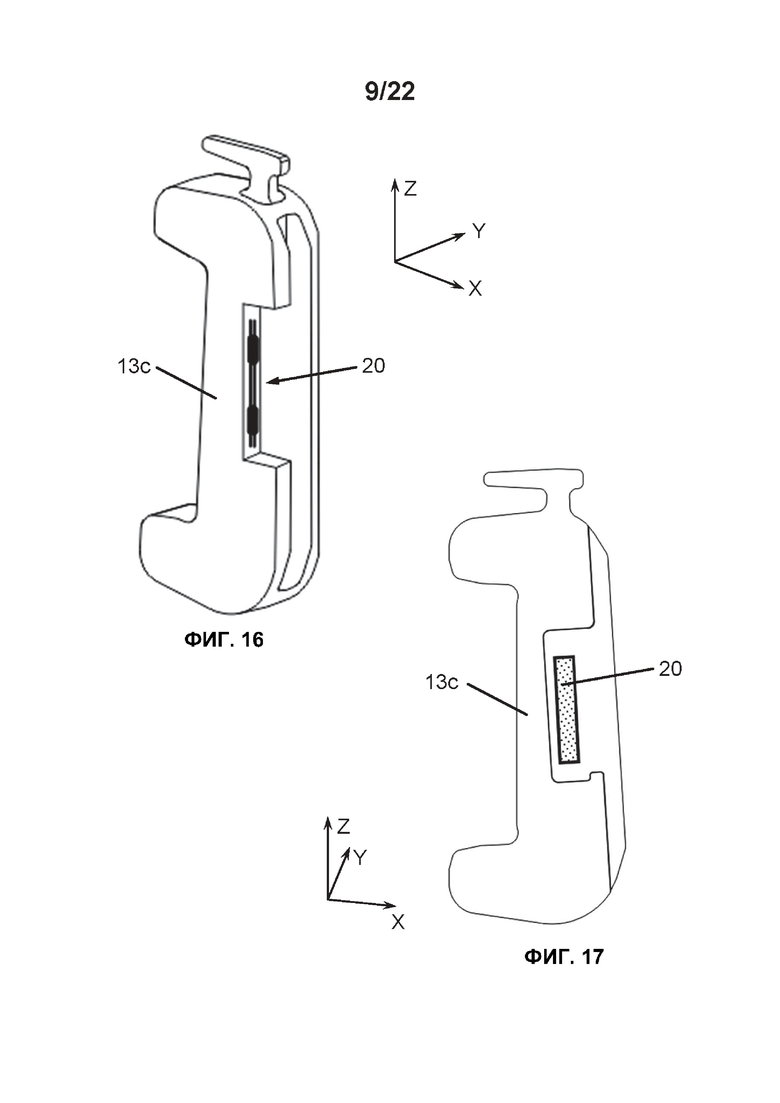
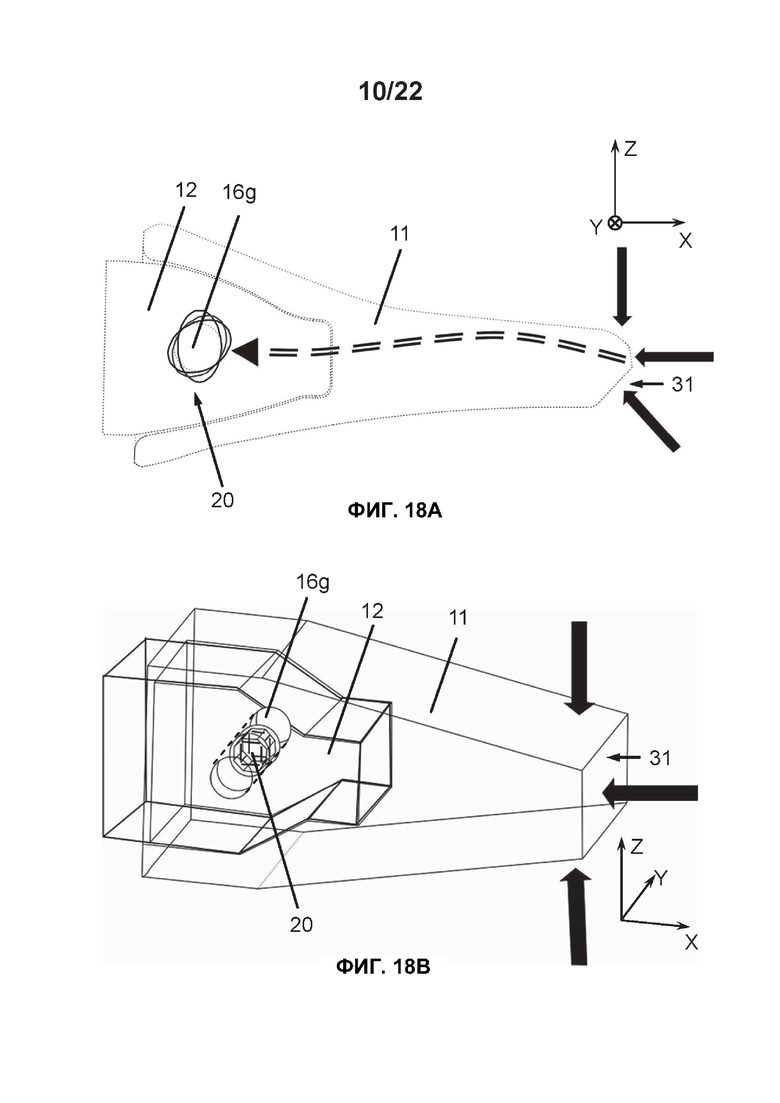
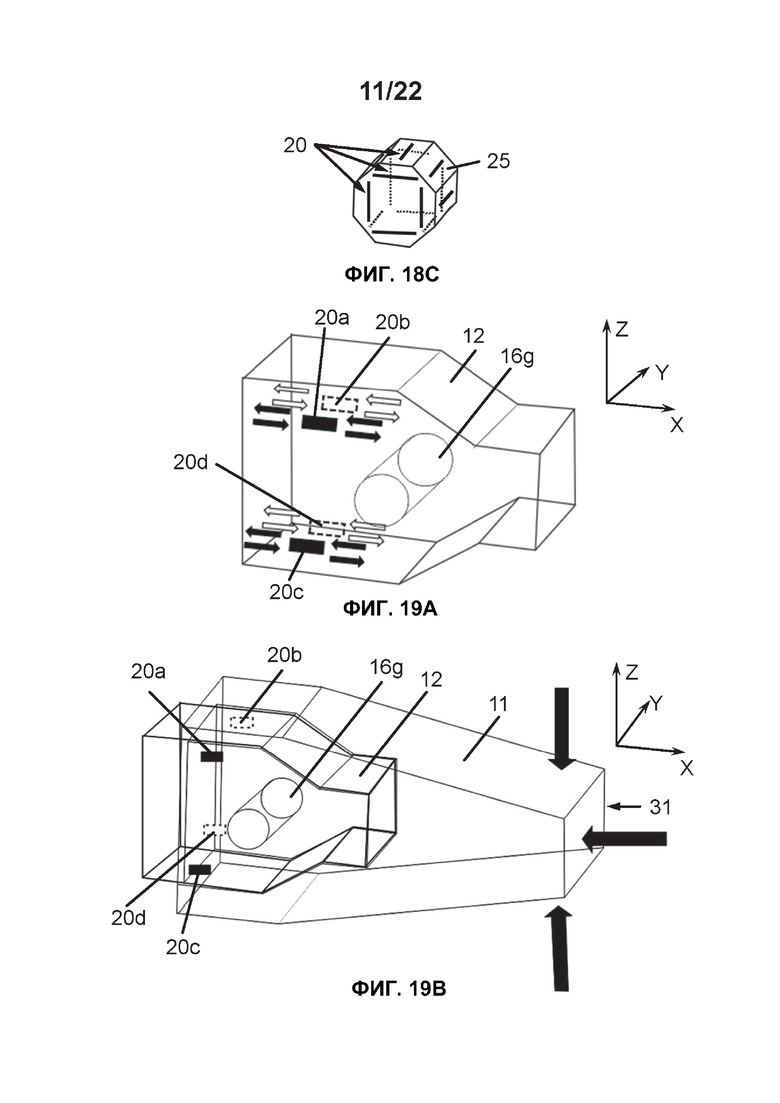
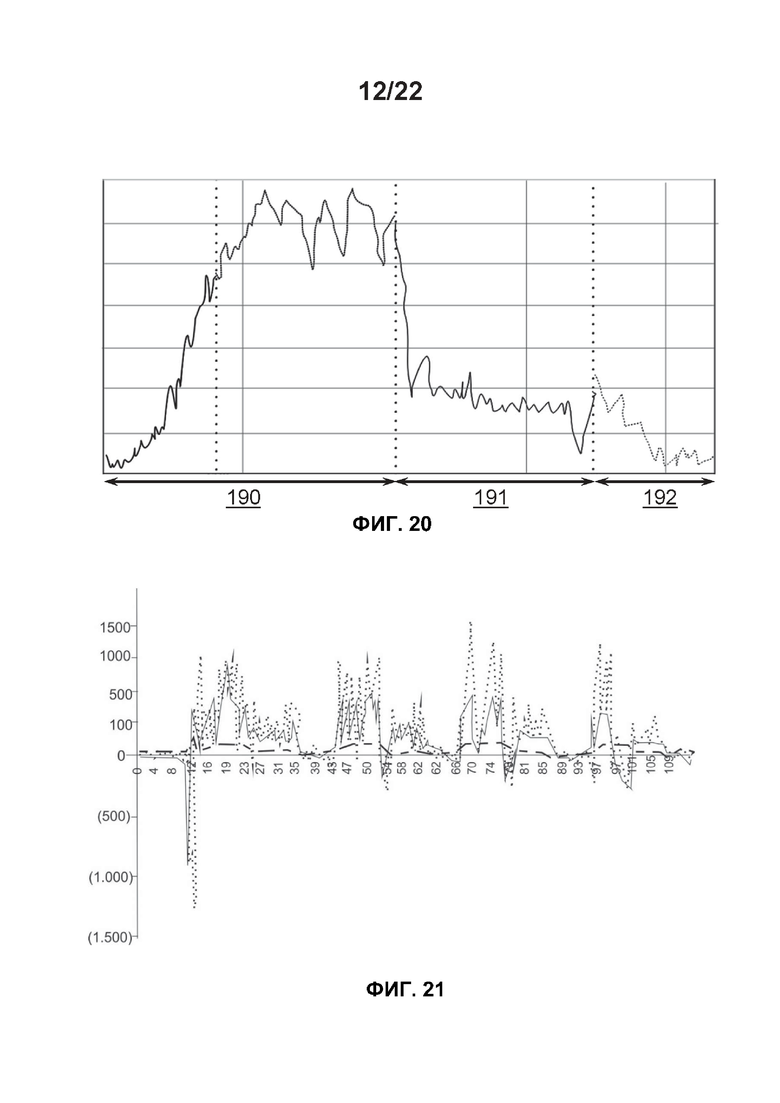
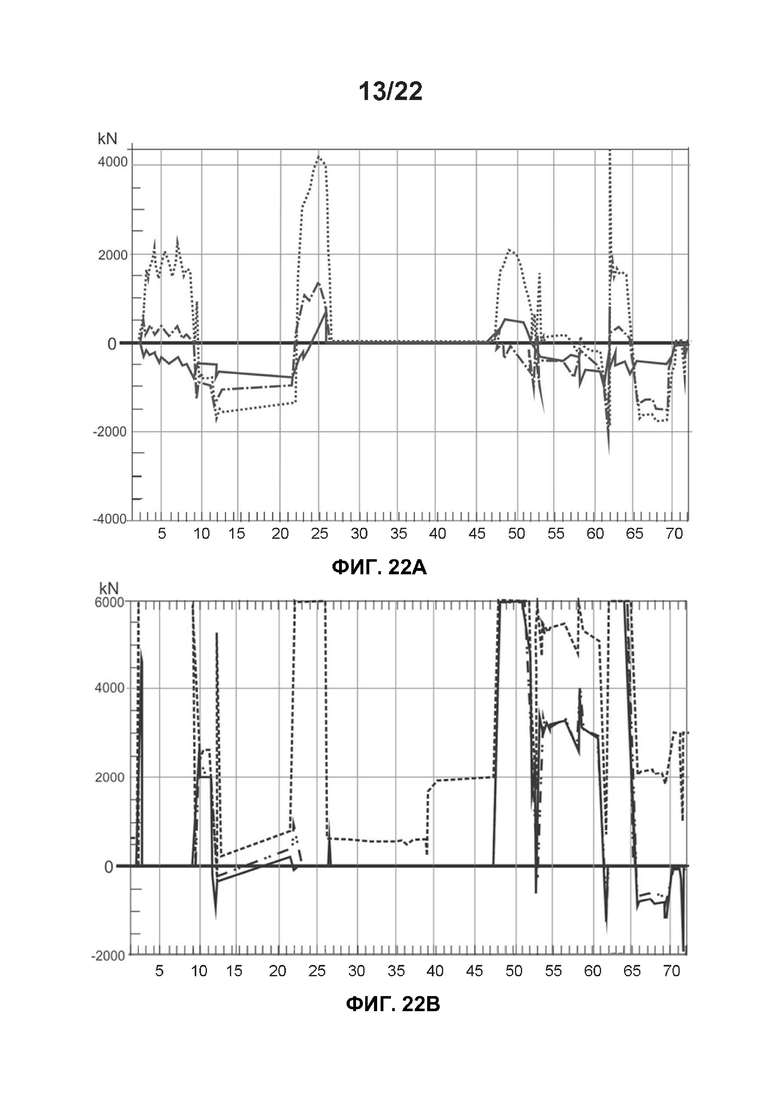
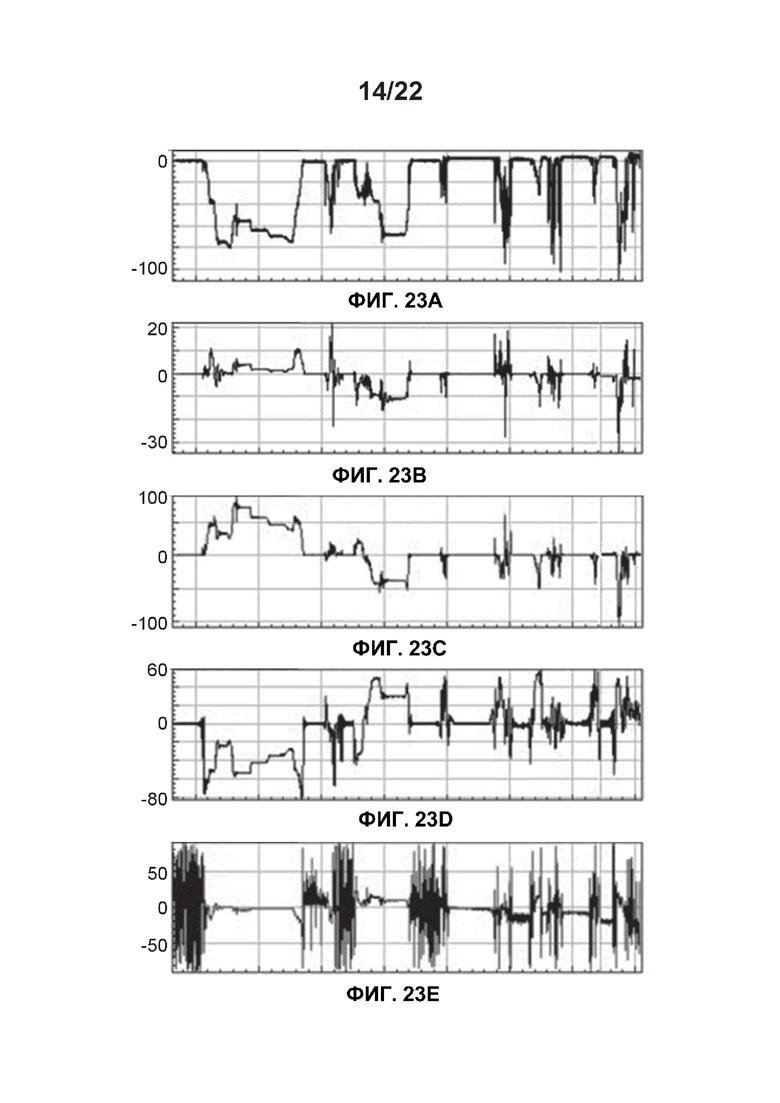
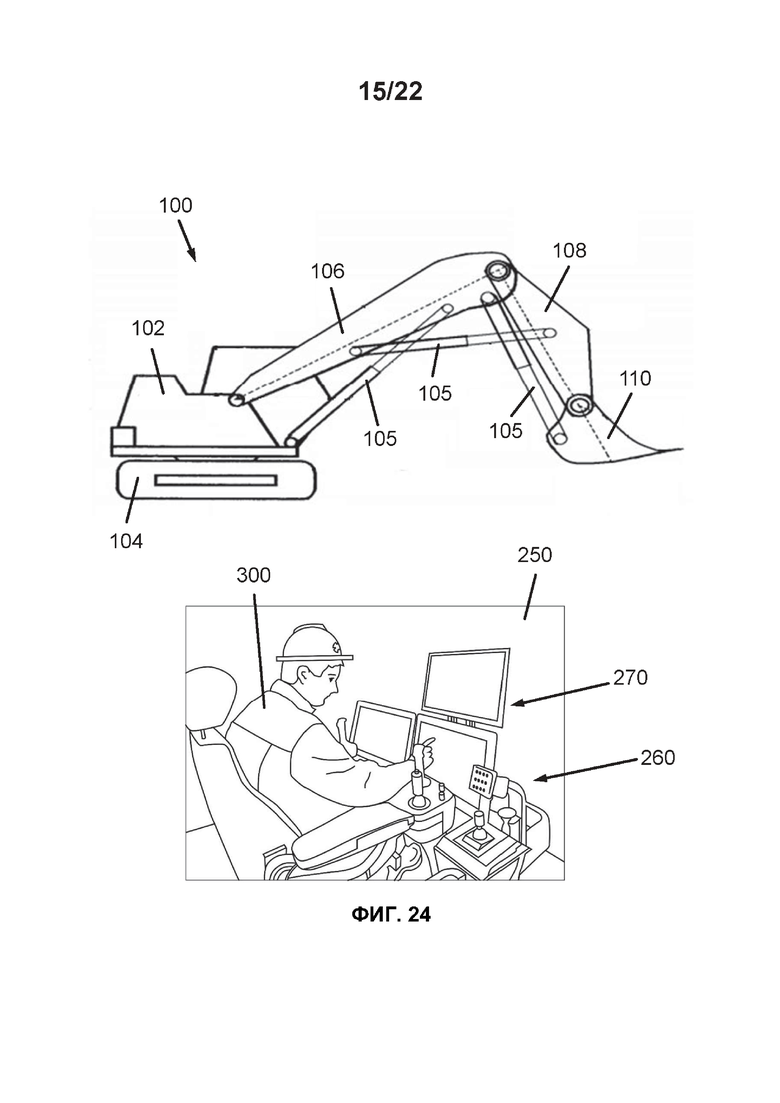
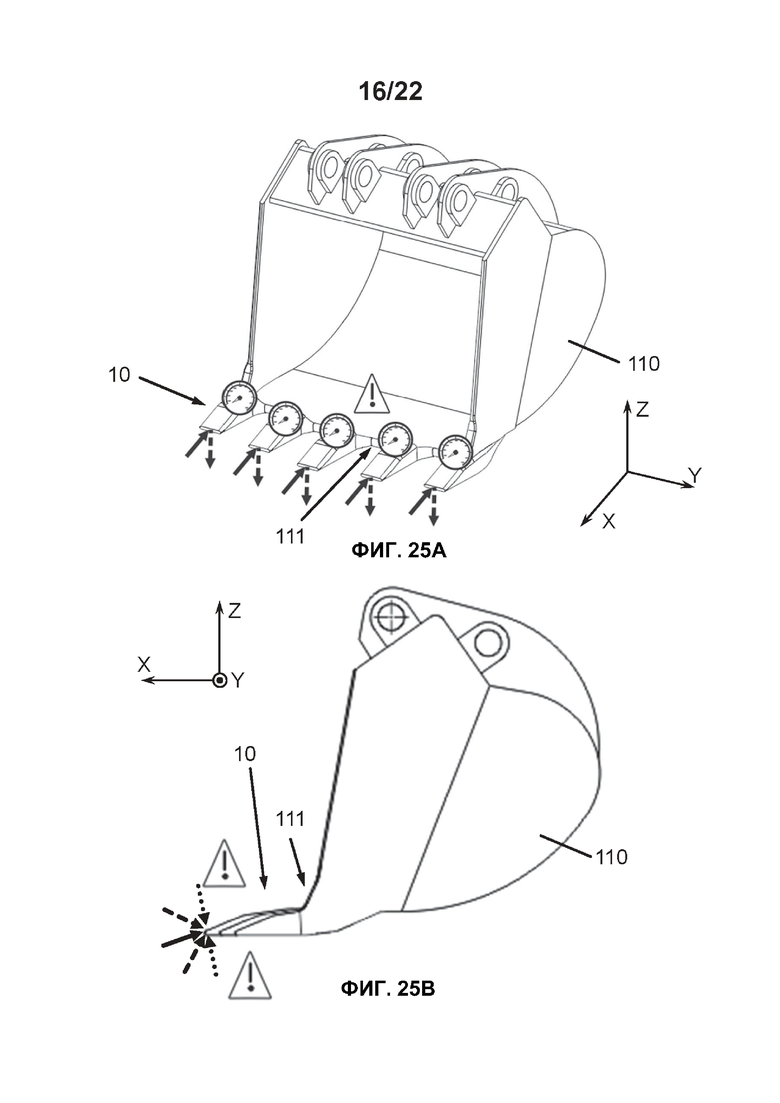
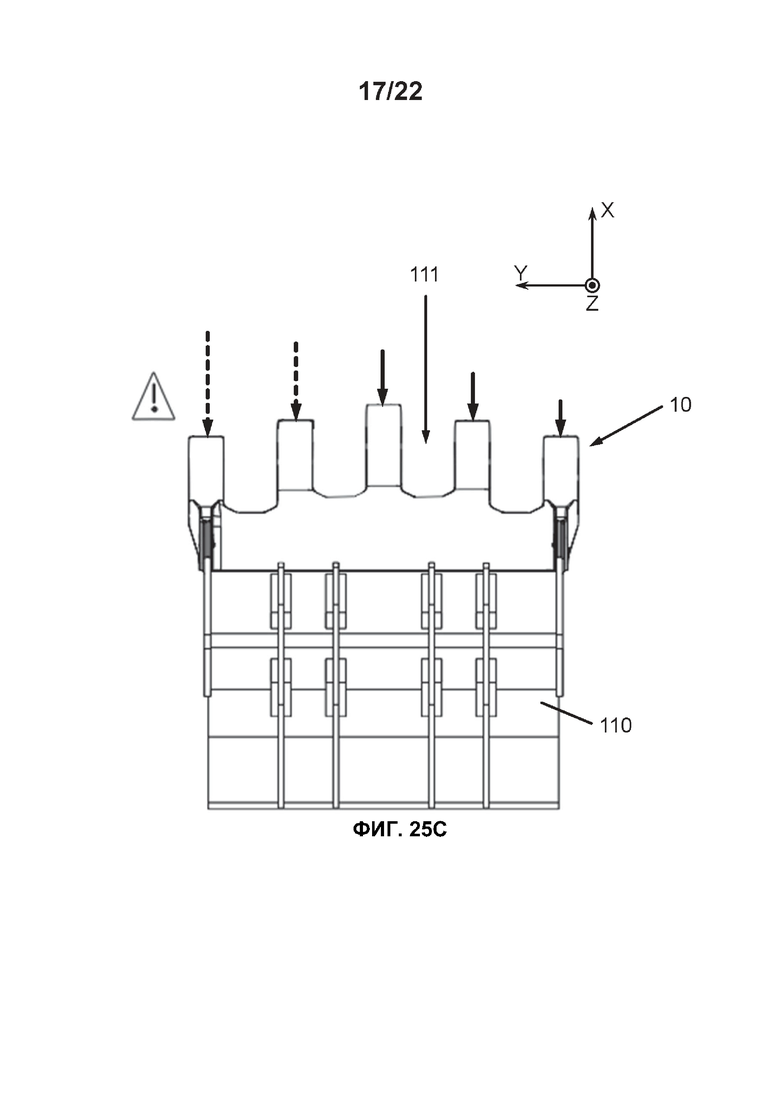
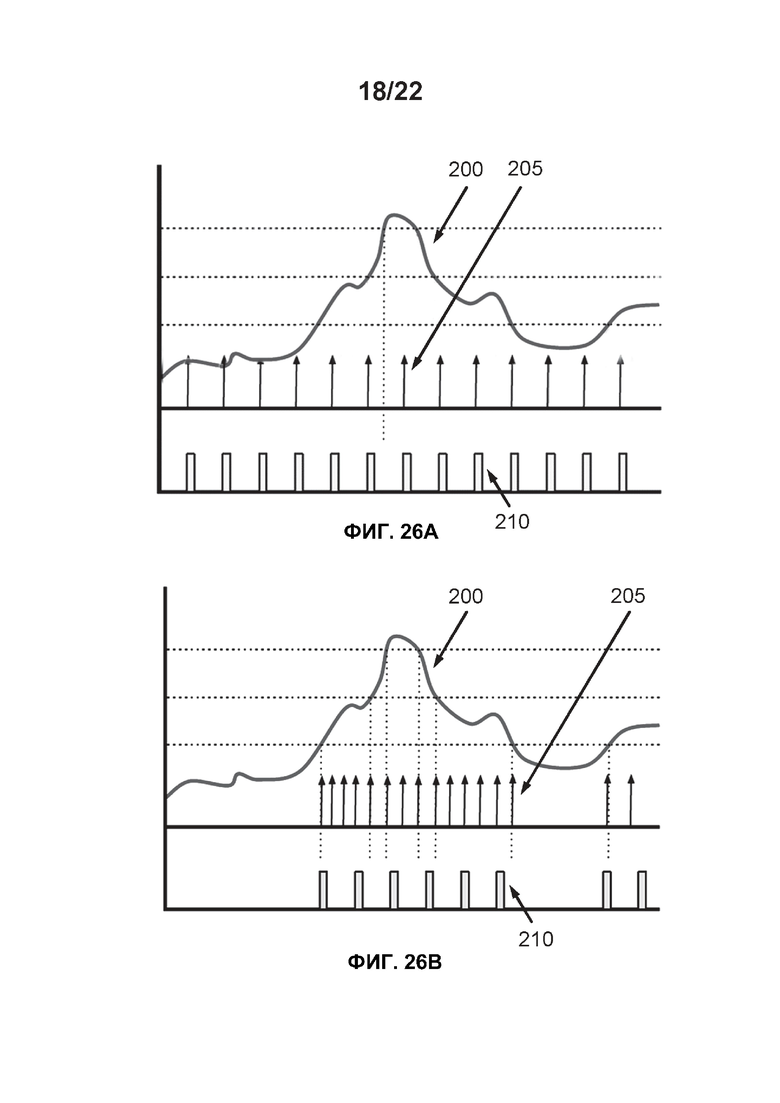
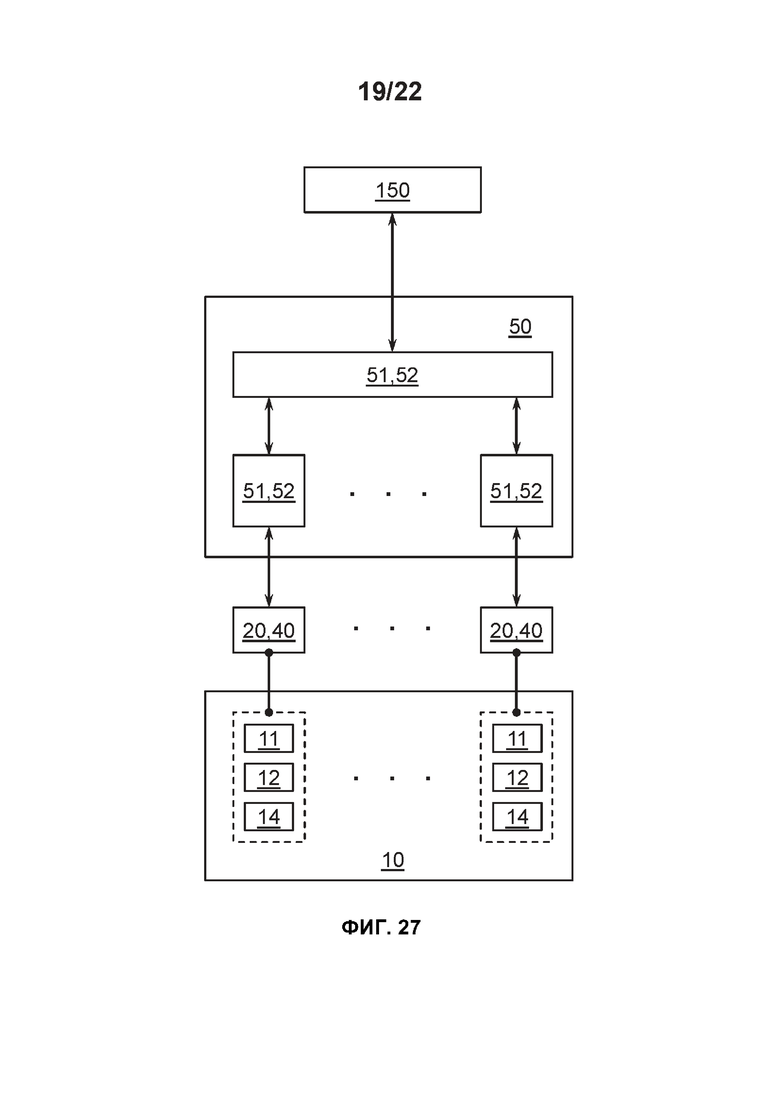
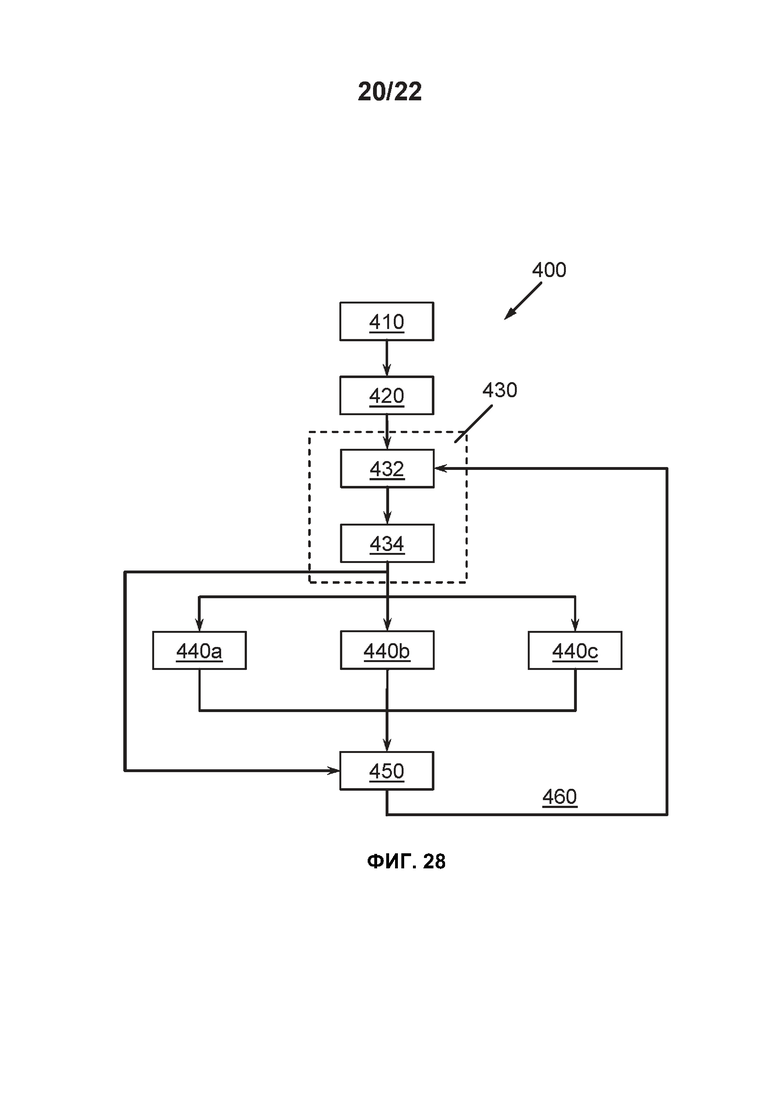
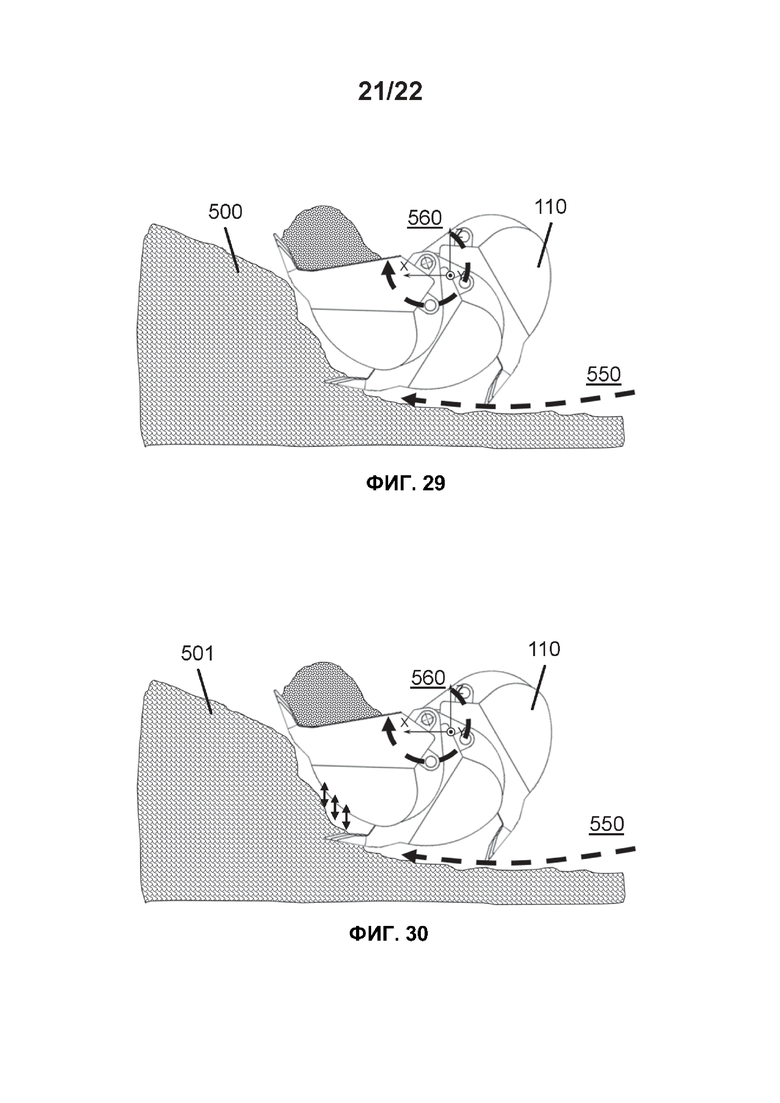
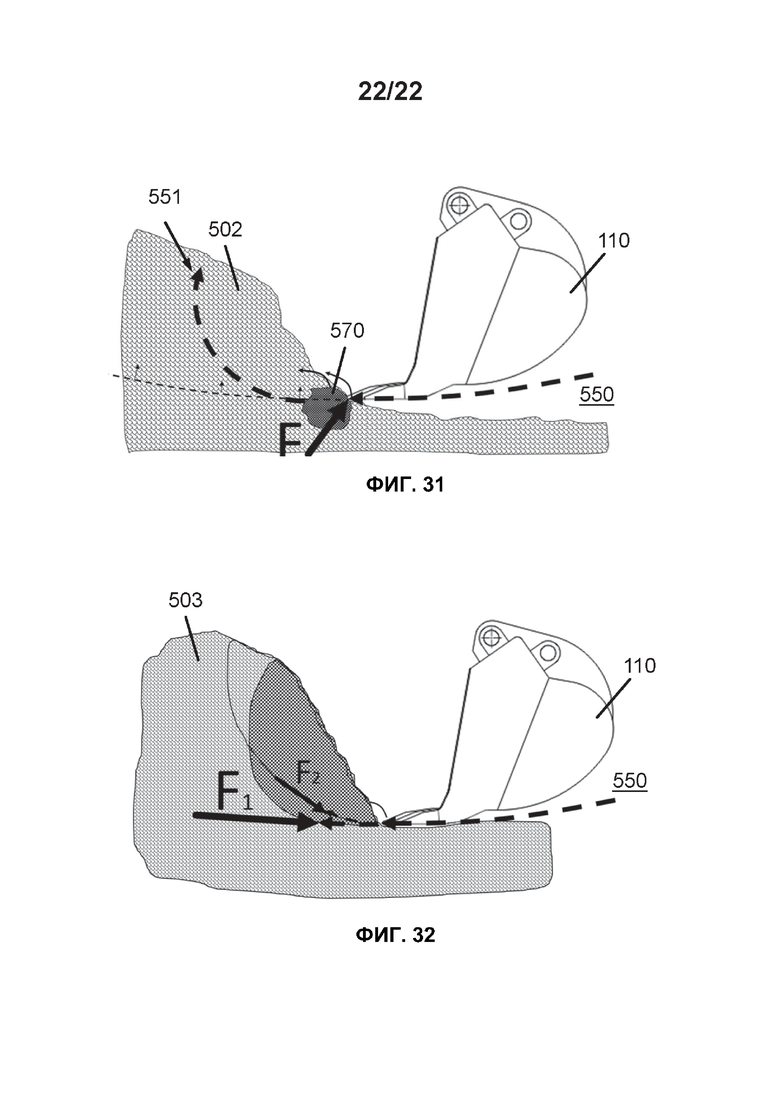
Группа изобретений относится к системам и способам измерения усилий в землеройных машинах. Технический результат – повышение КПД, снижение риска поломки элементов, оценка срока службы элементов износа. Система для измерения усилий в землеройных машинах и управления этими машинами, содержащая: множество элементов износа, выполненных с возможностью соединения с режущей кромкой землеройных орудий землеройной машины; один или несколько датчиков для измерения усилий, причем каждый датчик из числа одного или нескольких датчиков (20) располагается в одном элементе износа из числа множества элементов износа или между двумя элементами износа из числа множества элементов износа; и центральное средство управления для обработки результатов измерений, выполненных одним или несколькими датчиками, для расчета усилия, выдерживаемого элементами износа. Центральное средство управления выдает выходные команды, по меньшей мере, на основании обработанных результатов измерений, вследствие чего выходные команды предусматривают выполнение, по меньшей мере, одной из следующих операций: выдачи предупреждения в виде, по меньшей мере, одного воспринимаемого сигнала и автоматического уменьшения вырывного усилия машины, если обработанные значения превышают заданное пороговое значение чрезмерного усилия; и выдачи предупреждения в виде, по меньшей мере, одного воспринимаемого сигнала и автоматического повышения вырывного усилия, если обработанные значения оказываются меньше заданного порогового значения оптимального усилия. 3 н. и 14 з.п. ф-лы, 45 ил.
1. Система (1-3) для измерения усилий в землеройных машинах (100) и управления этими машинами, содержащая:
множество элементов (10-15) износа, выполненных с возможностью соединения с режущей кромкой (111) землеройных орудий (110) землеройной машины (100);
один или несколько датчиков (20) для измерения усилий, причем каждый датчик из числа одного или нескольких датчиков (20) располагается в одном элементе износа из числа множества элементов (10-15) износа или между двумя элементами износа из числа множества элементов (10-15) износа; и
центральное средство (50) управления для обработки результатов измерений, выполненных одним или несколькими датчиками (20), для расчета усилия, выдерживаемого элементами (10-15) износа;
причем центральное средство (50) управления выдает выходные команды (55), по меньшей мере, на основании обработанных результатов измерений, вследствие чего выходные команды (55) предусматривают выполнение, по меньшей мере, одной из следующих операций:
выдачи (440а) предупреждения в виде, по меньшей мере, одного воспринимаемого сигнала и автоматического уменьшения (440b) вырывного усилия машины (100), если обработанные значения превышают заданное пороговое значение чрезмерного усилия; и
выдачи предупреждения в виде, по меньшей мере, одного воспринимаемого сигнала и автоматического повышения (440с) вырывного усилия, если обработанные значения оказываются меньше заданного порогового значения оптимального усилия.
2. Система (1-3) по п. 1, в которой, по меньшей мере, один датчик из числа одного или нескольких датчиков (20) располагается в полости (16a-16g), сформированной в соответствующем элементе (10-15) износа, где располагается, по меньшей мере, один датчик (20).
3. Система (1-3) по п. 2, в которой: один или несколько элементов износа из числа множества элементов износа, снабженных, по меньшей мере, одним размещенным в них датчиком, характеризуются наличием продольной, поперечной и вертикальной осей; а один, некоторые или все датчики в полости располагается/располагаются на одной или нескольких стенках, ограничивающих полость вдоль ее поперечной или вертикальной оси, и/или один, некоторые или все датчики в полости располагается/располагаются на стенке, ограничивающей полость вдоль ее продольной оси.
4. Система (1-3) по п. 1, в которой повышение и уменьшение вырывного усилия предусматривает, по меньшей мере, выполнение одной из следующих операций:
повышения и уменьшения, соответственно, давления, оказываемого на цилиндры (105) гидросистемы машины (100);
изменения угла атаки землеройных орудий (110) для повышения и уменьшения, соответственно, вырывного усилия; и
изменения траектории, по которой движутся землеройные орудия (110), для повышения и уменьшения, соответственно, вырывного усилия
5. Система (1-3) по п. 1, в которой центральное средство (50) управления выполнено с возможностью приема одного или нескольких видов входных данных машины (100), и центральное средство (50) управления выдает выходные команды (55), дополнительно исходя из одного или нескольких видов входных данных.
6. Система (1-3) по п. 5, в которой один или несколько видов входных данных представляют собой один или несколько следующих видов входных данных: мощность, которую подает машина (100), вырывное усилие, энергопотребление и производительность гидросистемы машины (100).
7. Система (1-3) по п. 1, в которой один, некоторые или все датчики из числа одного или нескольких датчиков (20) располагаются в любом из следующих элементов: в зубьях (11), штангах (12) зубьев и крепежных элементах (13, 14) из числа множества элементов (10-15) износа.
8. Система (1-3) по п. 7, в которой каждый датчик из числа одного или нескольких датчиков (20) располагается в штангах (12) зубьев.
9. Система (1-3) по п. 7, в которой каждый датчик из числа одного или нескольких датчиков (20) располагается в зубьях (11) или крепежных элементах (13, 14).
10. Система (1-3) по любому из пп. 1-6, в которой один, некоторые или все датчики из числа одного или нескольких датчиков (20) располагаются между двумя элементами износа из числа множества элементов (10-15) износа.
11. Землеройная машина (100), содержащая: землеройные орудия (110); и
систему (1-3) по любому из пп. 1-10, множество элементов (10-15) износа которой соединено с режущей кромкой (111) землеройных орудий (110).
12. Землеройная машина (100) по п. 11, дополнительно содержащая центр (150) управления для осуществления управления машиной (100), и в которой:
центральное средство (50) управления выдает выходные команды (55), по меньшей мере, на основании обработанных результатов измерений, вследствие чего выходные команды (55) предусматривают выполнение, по меньшей мере, одной из следующих операций:
выдачи предупреждения в форме, по меньшей мере, одного воспринимаемого сигнала и/или уменьшения вырывного усилия машины (100), если обработанные значения превышают заданное пороговое значение чрезмерного усилия; и
выдачи предупреждения в форме, по меньшей мере, одного воспринимаемого сигнала и/или повышения вырывного усилия, если обработанные значения оказываются меньше заданного порогового значения оптимального усилия;
центральное средство (50) управления коммуникативно связано с центром (150) управления, причем центральное средство (50) управления выдает выходные команды (55) в центр (150) управления для управления машиной (100); и
центр (150) управления осуществляет управление машиной (100), по меньшей мере, на основании выходных команд (55), вследствие чего машина (100), по меньшей мере, частично управляется командами, выдаваемыми центром (150) управления.
13. Землеройная машина (100) по п. 12, дополнительно содержащая: средство (120) машинного зрения;
первое средство (125) для детектирования положения и ориентации стрелы (106) машины (100);
второе средство (130) для детектирования положения и ориентации рукояти (108) машины (100); и
третье средство (135) для детектирования положения и ориентации землеройных орудий (110).
14. Способ (400) для измерения усилий в землеройных машинах (100) и управления этими машинами, предусматривающий выполнение следующих стадий:
обеспечения наличия (410) системы (1-3) в землеройной машине (100), причем система (1-3) предназначена для измерения усилий в землеройных машинах (100) и управления этими машинами и включает в себя:
множество элементов (10-15) износа, выполненных с возможностью соединения с режущей кромкой (111) землеройных орудий (110) землеройной машины (100); и
один или несколько датчиков (20) для измерения усилий, причем каждый датчик из числа одного или нескольких датчиков (20) располагается в одном элементе износа из числа множества элементов (10-15) износа или между двумя элементами износа из числа множества элементов (10-15);
измерения (420) напряжений или однократных деформаций с помощью одного или нескольких датчиков (20);
обработки (430) результатов измерений, выполненных одним или несколькими датчиками (20), с помощью центрального средства (50) управления с целью расчета усилий на основании этих результатов измерений; и
определения (440а-440с) центральным средством (50) управления действия, которое должно быть выполнено, на основании рассчитанных усилий, что осуществляется следующим образом:
когда рассчитанные усилия превышают заданное пороговое значение чрезмерного усилия, предусмотрено, по меньшей мере, выполнение одного из следующих действий: выдачи (440а) предупреждения в форме, по меньшей мере, одного воспринимаемого сигнала, и автоматического уменьшения (440b) вырывного усилия машины (100); а
когда рассчитанные усилия меньше заданного порогового значения оптимального усилия, предусмотрено, по меньшей мере, выполнение одного из следующих действий: выдачи (440а) предупреждения в форме, по меньшей мере, одного воспринимаемого сигнала, и автоматического повышения (440с) вырывного усилия.
15. Способ (400) по п. 14, в котором повышение (440 с) и уменьшение (440b) вырывного усилия предусматривает выполнение, по меньшей мере, одной из следующих операций:
повышения и уменьшения, соответственно, давления, оказываемого на цилиндры (105) гидросистемы машины (100);
изменения угла атаки землеройных орудий (110) для повышения и уменьшения, соответственно, вырывного усилия; и
изменения траектории, по которой движутся землеройные орудия (110), для повышения и уменьшения, соответственно, вырывного усилия.
16. Способ (400) по любому из предшествующих пп. 14, 15, отличающийся тем, что:
машина (100) содержит центр (150) управления, предназначенный для управления машиной (100);
действие, определенное центральным средством (50) управления, предусматривает, по меньшей мере, выполнение одной из следующих операций:
автоматического уменьшения (440b) вырывного усилия машины (100), если рассчитанные усилия превышают заданное пороговое значение чрезмерного усилия; и
автоматического повышения (440с) вырывного усилия, если рассчитанные усилия оказываются меньше заданного порогового значения оптимального усилия; при этом центр (150) управления осуществляет управление машиной (100), по меньшей мере, на основании указанного действия, вследствие чего машина (100), по меньшей мере, частично управляется командами, выдаваемыми центром (150) управления.
17. Способ (400) по п. 16, в котором центр (150) управления осуществляет управление машиной (100) на основании, по меньшей мере, указанного действия, вследствие чего машина (100) полностью управляется командами, выдаваемыми центром (150) управления; и отличающийся тем, что машина (100) дополнительно содержит:
средство (120) машинного зрения;
первое средство (125) для детектирования положения и ориентации стрелы (106) машины (100);
второе средство (130) для детектирования положения и ориентации рукояти (108) машины (100); и
третье средство (135) для детектирования положения и ориентации ковша (110).
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| ОБНАРУЖЕНИЕ И ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ МЕТАЛЛИЧЕСКОГО ИНСТРУМЕНТА | 2012 |
|
RU2608269C2 |
| US 5743031 A, 28.04.1998 | |||
| US 20160376771 A1, 29.12.2016 | |||
| US 10011975 B2, 03.07.2018 | |||
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |

